Четырехфазный шаговый двигатель: ЧЕТЫРЕХФАЗНЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ ШДР-5
alexxlab | 18.01.2023 | 0 | Разное
Шаговый двигатель
Дмитрий Левкин
- Конструкция
- Характеристики
Предшественником шагового двигателя является серводвигатель.
Шаговые (импульсные) двигатели непосредственно преобразуют управляющий сигнал в виде последовательности импульсов в пропорциональный числу импульсов и фиксированный угол поворота вала или линейное перемещение механизма без датчика обратной связи. Это обстоятельство упрощает систему привода и заменяет замкнутую систему следящего привода (сервопривода) разомкнутой, обладающей такими преимуществами, как снижение стоимости устройства (меньше элементов) и увеличение точности в связи с фиксацией ротора шагового двигателя при отсутствии импульсов сигнала.
Очевиден и недостаток привода с шаговым двигателем: при сбое импульса дальнейшее слежение происходит с ошибкой в угле, пропорциональной числу пропущенных импульсов [2].
Поэтому в задачах, где требуются высокие характеристики (точность, быстродействие) используются серводвигатели.
Шаговый двигатель, как и любой вращающийся электродвигатель, состоит из ротора и статора. Статор – неподвижная часть, ротор – вращающаяся часть.
Гибридный шаговый электродвигатель
Шаговые двигатели надежны и недороги, так как ротор не имеет контактных колец и коллектора. Ротор имеет либо явно выраженные полюса, либо тонкие зубья. Реактивный шаговый двигатель – имеет ротор из магнитомягкого материала с явно выраженными полюсами. Шаговый двигатель с постоянными магнитами имеет ротор на постоянных магнитах. Гибридный шаговый двигатель имеет составной ротор включающий полюсные наконечники (зубья) из магнитомягкого материала и постоянные магниты. Определить имеет ротор постоянные магниты или нет можно посредством вращения обесточенного двигателя, если при вращении имеется фиксирующий момент и/или пульсации значит ротор выполнен на постоянных магнитах.
Статор шагового двигателя имеет сердечник с явно выраженными полюсами, который обычно делается из ламинированных штампованных листов электротехнической стали для уменьшения вихревых токов и уменьшения нагрева. Статор шагового двигателя обычно имеет от двух до пяти фаз.
Так как шаговый двигатель не предназначен для непрерывного вращения в его параметрах не указывают мощность. Шаговый двигатель – маломощный двигатель по сравнению с другими электродвигателями.
Одним из определяющих параметров шагового двигателя является шаг ротора, то есть угол поворота ротора, соответствующий одному импульсу. Шаговый двигатель делает один шаг в единицу времени в момент изменения импульсов управления. Величина шага зависит от конструкции двигателя: количества обмоток, полюсов и зубьев. В зависимости от конструкции двигателя величина шага может меняться в диапазоне от 90 до 0,75 градусов. С помощью системы управления можно еще добиться уменьшения шага пополам используя соответствующий метод управления.
- По конструкции ротора выделяют три типа шаговых двигателей:
- реактивный;
- с постоянными магнитами;
- гибридный.
Реактивный шаговый двигатель – синхронный реактивный двигатель. Статор реактивного шагового двигателя обычно имеет шесть явновыраженных полюсов и три фазы (по два полюса на фазу), ротор – четыре явно выраженных полюса, при такой конструкции двигателя шаг равен 30 градусам. В отличии от других шаговых двигателей выключенный реактивный шаговый двигатель не имеет фиксирующего (тормозящего) момента при вращении вала.
Трехфазный реактивный шаговый двигатель
(шаг 30°)
Четырехфазный реактивный шаговый двигатель
Ниже представлены осциллограммы управления для трехфазного шагового двигателя.
Униполярное волновое управление
Биполярное полношаговое управление
Биполярное 6-шаговое управление
Осциллограммы управления для четырехфазного шагового двигателя показаны на рисунке ниже. Последовательное включение фаз статора создает вращающееся магнитное поле за которым следует ротор. Однако из-за того, что ротор имеет меньшее количества полюсов, чем статор, ротор поворачивается за один шаг на угол меньше чем угол статора. Для реактивного двигателя угол шага равен:
Последовательное включение фаз статора создает вращающееся магнитное поле за которым следует ротор. Однако из-за того, что ротор имеет меньшее количества полюсов, чем статор, ротор поворачивается за один шаг на угол меньше чем угол статора. Для реактивного двигателя угол шага равен:
,
- где NR – количество полюсов ротора;
- NS – количество полюсов статора.
Осциллограммы управления 4-х фазным реактивным шаговым двигателем
Чтобы изменить направление вращения ротора (реверс) реактивного шагового двигателя, необходимо поменять схему коммутации обмоток статора, так как изменение полярности импульса не изменяет направления сил, действующих на невозбужденный ротор [2].
Реактивные шаговые двигатели применяются только тогда, когда требуется не очень большой момент и достаточно большого шага угла поворота. Такие двигатели сейчас редко применяются.
- Отличительные черты:
- ротор из магнитомягкого материала с явно выраженными полюсами;
- наименее сложный и самый дешевый шаговый двигатель;
- отсутствует фиксирующий момент в обесточенном состоянии;
- большой угол шага.

Шаговый двигатель с постоянными магнитами имеет ротор на постоянных магнитах. Статор обычно имеет две фазы.
По сравнению с реактивными, шаговые двигатели с активным ротором создают большие вращающие моменты, обеспечивают фиксацию ротора при снятии управляющего сигнала. Недостаток двигателей с активным ротором — большой угловой шаг (7,5—90°). Это объясняется технологическими трудностями изготовления ротора с постоянными магнитами при большом числе полюсов. Если угол фиксации находится в диапазоне от 7,5 до 90 градусов скорее всего это шаговый двигатель с постоянными магнитами нежели гибридный шаговый двигатель.
Обмотки могут иметь ответвление в центре для работы с однополярной схемой управления. Двухполярное управление требуется для питания обмоток без центрального ответвления.
- Таким образом по виду обмоток выделяют два типа шаговых двигателей:
- униполярный (однополярный),
- биполярный (двухполярный).
Униполярный (однополярный) шаговый двигатель
Униполярный шаговый двигатель с постоянными магнитами имеет одну обмотку на фазу с ответвлением в центре.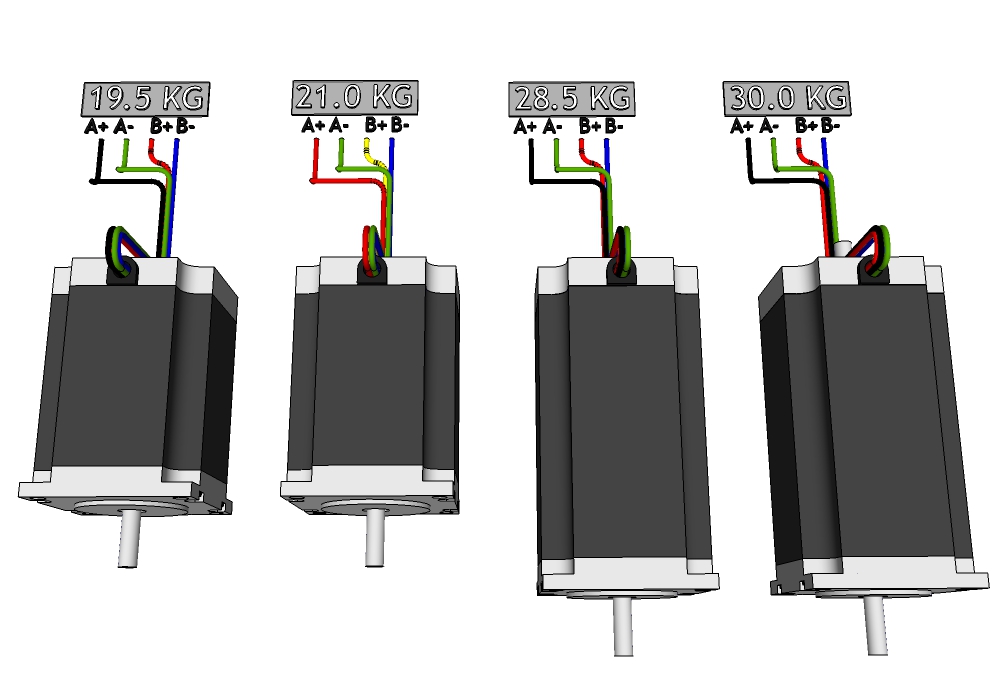 Каждая секция обмотки включается отдельно.
Каждая секция обмотки включается отдельно.
Таким образом расположение магнитных полюсов может быть изменено без изменения направления тока, а схема коммутации может быть выполнена очень просто (например на одном транзисторе) для каждой обмотки. Обычно центральное ответвление каждой фазы делается общим, в результате получается три вывода на фазу и всего шесть для обычного двухфазного двигателя.
Легкое управление однополярными двигателями сделало их популярными для любителей, они возможно являются наиболее дешевым способом чтобы получить точное угловое перемещение.
Схема униполярного двухфазного шагового двигателя
Схема биполярного двухфазного шагового двигателя
Биполярный шаговый двигатель
Двухполярные двигатели имеют одну обмотку на фазу. Для того чтобы изменить магнитную полярность полюсов необходимо изменить направление тока в обмотке, для этого схема управления должна быть более сложной, обычно с H-мостом. Биполярный шаговый двигатель имеет два вывода на фазу и не имеет общего вывода. Так как пространство у биполярного двигателя используется лучше, такие двигатели имеют лучший показатель мощность/объем чем униполярные. Униполярный двигатель имеет двойное количество проводников в том же объеме, но только половина из них используется при работе, тем не менее биполярный двигатель сложнее в управление.
Так как пространство у биполярного двигателя используется лучше, такие двигатели имеют лучший показатель мощность/объем чем униполярные. Униполярный двигатель имеет двойное количество проводников в том же объеме, но только половина из них используется при работе, тем не менее биполярный двигатель сложнее в управление.
Управление шаговым двигателем с постоянными магнитами
Для управления шаговым двигателем на постоянных магнитах к его обмоткам прикладывается сфазированный переменный ток. На практике это почти всегда прямоугольный сигнал сгенерированный от источника постоянного тока. Биполярная система управления генерирует прямоугольный сигнал изменяющийся от плюса к минусу, например от +2,5 В до -2,5 В. Униполярная система управления меняет направление магнитного потока катушки посредством двух сигналов, которые поочереди подаются на противоположные выводы катушки относительно ее центрального ответвления.
- Существует несколько способов управления:
- волновое,
- полношаговое,
- полушаговое.

Волновое управление
Простейшим способом управления шаговым двигателем является волновое управление. При таком управлении в один момент времени возбуждается только одна обмотка. Но такой способ управления не обеспечивает максимально возможного момента.
Положение ротора шагового двигателя при волновом управлении
Шаговый двигатель с постоянными магнитами может иметь разную схему соединения обмоток статора.
Волновое управление биполярным шаговым двигателем
На рисунке выше представлены схема биполярного шагового двигателя и двухполюсные осциллограммы управления. При таком управлении обе полярности (“+” и “-“) подаются на двигатель. Магнитное поле катушки поворачивается за счет того, что полярность токов управления меняется.
Волновое управление униполярным шаговым двигателем
На рисунке выше представлены схема униполярного шагового двигателя и однополюсные осциллограммы управления.Так как для управления униполярным шаговым двигателем требуется только одна полярность это существенно упрощает схему системы управления. При этом требуется генерация четырех сигналов так как необходимо два однополярных сигнала для создания переменного магнитного поля катушки.
При этом требуется генерация четырех сигналов так как необходимо два однополярных сигнала для создания переменного магнитного поля катушки.
Необходимое для работы шагового двигателя переменное магнитное поле может быть создано как униполярным так и биполярным способом. Однако для униполярного управления катушки двигателя должны иметь центральное ответвление.
Шаговый двигатель с постоянными магнитами может иметь разную схему соединения обмоток статора. Схемы соединения шагового двигателя показаны на рисунке ниже.
Схема 4 выводного биполярного шагового двигателя
Схема 5 выводного униполярного шагового двигателя
Схема 6 выводного униполярного шагового двигателя
Схема 8 выводного шагового двигателя
Шаговый двигатель с 4 выводами может управляться только биполярным способом. 6-выводной двигатель предназначен для управления униполярным способом, несмотря на то, что он также может управляться биполярным способом если игнорировать центральные выводы. 5-выводной двигатель может управляться только униполярным способом, так как общий центральный вывод соединяет обе фазы.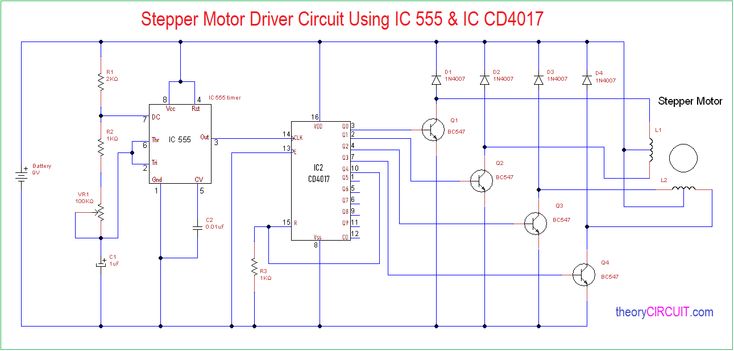 8-выводная конфигурация двигателя встречается редко, но обеспечивает максимальную гибкость. Такой двигатель может быть подключен для управления также как 6- или 5- выводной двигатель. Пара обмоток может быть подключена последовательно для высоковольтного биполярного управления с малыми токами или параллельно для низковольтного управления с большими токами.
8-выводная конфигурация двигателя встречается редко, но обеспечивает максимальную гибкость. Такой двигатель может быть подключен для управления также как 6- или 5- выводной двигатель. Пара обмоток может быть подключена последовательно для высоковольтного биполярного управления с малыми токами или параллельно для низковольтного управления с большими токами.
- 8-выводные двигатели могут быть соединены в нескольких конфигурациях:
- униполярной;
- биполярной с последовательным соединением. Больше индуктивность, но ниже ток обмотки;
- биполярной с параллельным соединением. Больше ток, но ниже индуктивность;
- биполярной с одной обмоткой на фазу. Метод использует только половину обмоток двигателя при работе, что уменьшает доступный момент на низких оборотах, но требует меньше тока.
Полношаговое управление
Полношаговое управление обеспечивает больший момент, чем волновое управление так как обе обмотки двигателя включены одновременно. Положение ротора при полношаговом управлении показано на рисунке ниже.
Положение ротора при полношаговом управлении показано на рисунке ниже.
Положение ротора шагового двигателя при полношаговом управлении
Полношаговое биполярное управление шаговым двигателем
Полношаговое биполярное управление показанное на рисунке выше имеет такой же шаг как и при волновом управлении. Униполярное управление (не показано) потребует два однополярных управляющих сигнала для каждого биполярного сигнала. Однополярное управление требует менее сложной и дорогой схемы управления. Дополнительная стоимость биполярного управления оправдана когда требуется более высокий момент.
Полушаговое управление
Шаг для данной геометрии шагового двигателя делится пополам. Полушаговое управление обеспечивает большее разрешение при позиционировании вала двигателя.
Положение ротора шагового двигателя при полушаговом управлении
Полушаговое управление – комбинация волнового управления и полношагового управления с питанием по очереди: сначала одной обмотки, затем с питанием обоих обмоток. При таком управлении количество шагов увеличивается в двое по сравнению с другими методами управления.
При таком управлении количество шагов увеличивается в двое по сравнению с другими методами управления.
Полушаговое биполярное управление шаговым двигателем
Гибридный шаговый двигатель был создан с целью объединить лучшие свойства обоих шаговых двигателей: реактивного и с постоянными магнитами, что позволило добиться меньшего угла шага. Ротор гибридного шагового двигателя представляет из себя цилиндрический постоянный магнит, намагниченный вдоль продольной оси с радиальными зубьями из магнитомягкого материала.
Конструкция гибридного шагового двигателя (осевой разрез)
Статор обычно имеет две или четыре фазы распределенные между парами явно выраженных полюсов. Обмотки статора могут иметь центральное ответвление для униполярного управления. Обмотка с центральным ответвлением выполняется с помощью бифилярной намотки.
Гибридный шаговый двигатель (радиальный разрез)
Заметьте что 48 зубьев на одной секции ротора смещены на половину зубцового деления λ относительно другой секции (рисунок ниже).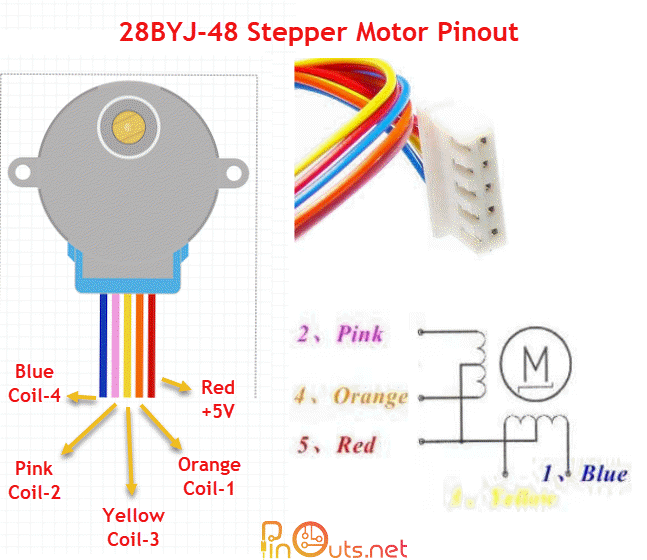 Из-за этого смещения ротор фактически имеет 96 перемежающихся полюсов противоположной полярности.
Из-за этого смещения ротор фактически имеет 96 перемежающихся полюсов противоположной полярности.
Ротор гибридного шагового двигателя
Зубья на полюсах статора соответствуют зубьям ротора, исключая отсутствующие зубья в пространстве между полюсами. Таким образом один полюс ротора, скажем южный полюс, можно выровнять со статором в 48 отдельных положениях. Однако зуб южного полюса ротора смещен относительно северного зуба на половину зубцового деления. Поэтому ротор может быть выставлен со статором в 96 отдельных положениях.
Соседние фазы статора гибридного шагового двигателя смещены друг относительно друга на одну четверть зубцового деления λ. В результате ротор перемещается с шагом в четверть зубцового деления во время переменного возбуждения фаз. Другими словами для такого двигателя на один оборот приходится 2×96=192 шага.
- Шаговый гибридный двигатель имеет:
- шаг меньше, чем у реактивного двигателя и двигателя с постоянными магнитами;
- ротор – постоянный магнит с тонкими зубьями. Северные и южные зубья ротора смещены на половину зубцового деления для уменьшения шага;
- полюсы статора имеют такие же зубья как и ротор;
- статор имеет не менее чем две фазы;
- зубья соседних полюсов статора смещены на четверть зубцового деления для создания меньшего шага.
 Северные и южные зубья ротора смещены на половину зубцового деления для уменьшения шага;
Северные и южные зубья ротора смещены на половину зубцового деления для уменьшения шага;- ГОСТ 27471-87 Машины электрические вращающиеся. Термины и определения.
- Н.И.Волков, В.П.Миловзоров. Электромашинные устройства автоматики: Учеб. для вузов по спец. “Автоматика и телемеханика”.- 2-е изд.- М.:Высш.шк., 1986.
Библиографический список
Сравнение двухфазных и трёхфазных микрошаговых двигателей
Шаговые двигатели сегодня применяются в различных сферах: машиностроение, станкостроение, электроника и другие виды деятельности. Шаговый двигатель представляет собой синхронный электродвигатель, основными элементами которого являются статор, ротор и обмотки возбуждения. Приведение ротора в движение, происходит при последовательном запуске обмоток, это приводит к дискретным угловым смещением, определяемым типом и характеристиками микрошагового двигателя.
Режим микрошага осуществляется при управлении током обмоток микрошагового двигателя. Выбирая значения токов в обмотках можно зафиксировать ротор в промежуточном положении между шагами. За счёт этого повышается плавность хода ротора и можно достичь очень высоких значений по точности. На сегодняшний день, миркошаговые двигатели позволяют увеличить точность в десятки раз.
Преимущества микрошаговых двигателей для станков с ЧПУ:
- Микрошаговые двигатели в разы дешевле, чем серводвигатели.
- Простота в коммутации (многие программы написанные для ЧПУ станков – подходят).
- Более простые по конструктиву, в случае поломки, ремонт происходит довольно быстро и дёшево.
- Большой срок службы
К недостаткам применения микрошагового двигателя относятся:
- Может возникать резонансный эффект и проскальзывание шагового двигателя;
- Нет обратной связи с ЧПУ;
- Расходуемая электроэнергия не зависит от наличия или отсутствия нагрузки;
- Сложности управления из-за особенности схемы;
Сравнение двухфазных и трёхфазных шаговых двигателей
Наиболее распространенные шаговые двигатели – двухфазные и трёхфазные.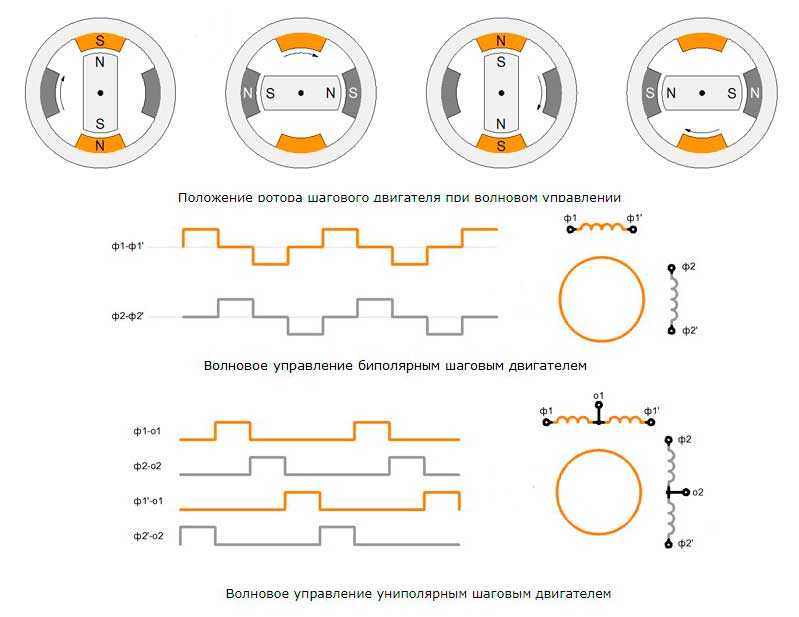 И зачастую, при выборе лазерного станка или фрезерного станка с ЧПУ, встаёт вопрос, с какими шаговыми двигателями взять станок?
И зачастую, при выборе лазерного станка или фрезерного станка с ЧПУ, встаёт вопрос, с какими шаговыми двигателями взять станок?
Двухфазный шаговый двигатель является более оптимальным вариантом в 90 % случаев и имеют больше. Объясняется это следующими факторами:
- более простая и надёжная схема устройства
- подходит под большинство драйверов для станков с ЧПУ
- двигатели и драйвера к ним стоят меньше, чем трёхфазные
Трёхфазные двигатели имеют большую дискретность шага, но разница минимальна. При выборе станка гораздо большее значение имеет сам конструктив оборудования, так как именно от этого зависит общая точность. Шаговый двигатель влияет на точность только в совокупности с остальными частями лазерного или фрезерного станка. Качество шагового двигателя не определяется углом шага.
Так, например, при рассмотрении двух одинаковых станков с одинаковой кинематикой, простая установка качественного редуктора 1/20 позволяет добиться на двигателе с шагом 1,8 градуса точности в разы большей, чем на двигателе с шагом 0,9 градуса. Качество шагового двигателя определяют такие моменты, как качество сборки, биение на валах, люфт на валах и погрешность на шаг.
Качество шагового двигателя определяют такие моменты, как качество сборки, биение на валах, люфт на валах и погрешность на шаг.
Подводя итог – двухфазные двигатели, на сегодняшний день являются более оптимальным выбором, ввиду названных выше факторов.
Каталог лазерных ЧПУ станков – открыть.
Каталог фрезерных ЧПУ станков – открыть.
типов степперов | Все о шаговых двигателях
Типы степперов
Сохранить Подписаться
Пожалуйста, войдите, чтобы подписаться на это руководство.
После входа в систему вы будете перенаправлены обратно к этому руководству и сможете подписаться на него.
Существует множество типов шаговых двигателей, некоторые
из которых требуют очень специализированных водителей.
Для наших целей мы сосредоточимся на шаговых двигателях, которые можно
управляется общедоступными драйверами.
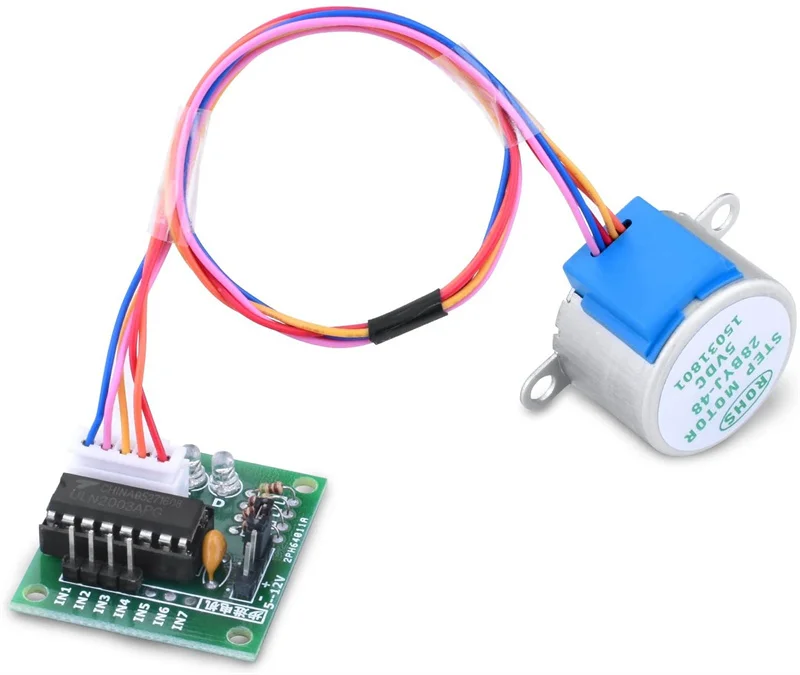
Это: шаговые двигатели с постоянными магнитами или гибридные, двухфазные биполярные или четырехфазные однополярные.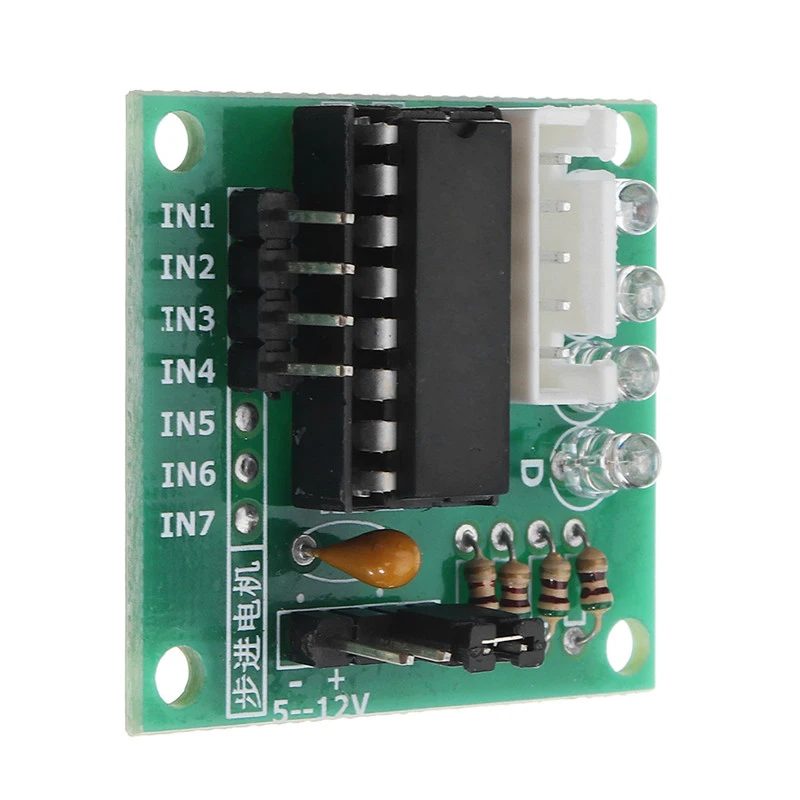
В первую очередь необходимо учитывать работу, которую должен выполнять двигатель. Как и следовало ожидать, более крупные двигатели способны развивать большую мощность. Размер шаговых двигателей варьируется от размера арахиса до огромных монстров NEMA 57.
Большинство двигателей имеют номинальный крутящий момент. Это то, на что вам нужно обратить внимание, чтобы решить, достаточно ли у двигателя силы, чтобы делать то, что вы хотите.
NEMA 17 — это стандартный размер, используемый в 3D-принтерах и небольших станках с ЧПУ. Меньшие двигатели находят применение во многих робототехнических и аниматронных приложениях. Более крупные рамы NEMA распространены в станках с ЧПУ и в промышленных приложениях.
Номера NEMA определяют стандартные размеры лицевой панели для монтажа двигателя. Они не определяют другие характеристики двигателя. Два разных двигателя NEMA 17 могут иметь совершенно разные электрические или механические характеристики и не обязательно являются взаимозаменяемыми.
Следующее, на что следует обратить внимание, это требуемое разрешение позиционирования. Количество шагов на оборот варьируется от 4 до 400. Обычно доступны 24, 48 и 200 шагов.
Разрешение часто выражается в градусах на шаг. Двигатель 1,8 ° такой же, как двигатель 200 шагов / оборотов.
Платой за высокое разрешение является скорость и крутящий момент. Двигатели с большим числом шагов работают на более низких оборотах, чем двигатели аналогичного размера. А более высокая частота шагов, необходимая для вращения этих двигателей, приводит к более низкому крутящему моменту, чем двигатель аналогичного размера с малым числом шагов при аналогичных скоростях.
Еще одним способом достижения высокого разрешения позиционирования является передача. Зубчатая передача 32: 1, подаваемая на выход двигателя с 8 шагами / оборотами, приведет к двигателю с 256 шагами.
Зубчатая передача также увеличивает крутящий момент двигателя. Некоторые крошечные шаговые двигатели с редуктором способны развивать впечатляющий крутящий момент. Но компромисс, конечно, скорость. Редукторные шаговые двигатели обычно ограничиваются приложениями с низкими оборотами.
Некоторые крошечные шаговые двигатели с редуктором способны развивать впечатляющий крутящий момент. Но компромисс, конечно, скорость. Редукторные шаговые двигатели обычно ограничиваются приложениями с низкими оборотами.
Люфт — еще одна проблема мотор-редукторов. Когда двигатель меняет направление, он должен компенсировать любую слабину, которая может быть в зубчатой передаче. Это может повлиять на точность позиционирования.
Еще одна вещь, которую следует учитывать, — это то, как двигатель будет взаимодействовать с остальной системой привода. Доступны двигатели с различными типами валов:
- Круглый или D-образный вал : Они доступны в различных стандартных диаметрах, и существует множество шкивов, шестерен и муфт валов, разработанных для соответствия. Валы “D” имеют одну плоскую сторону, чтобы предотвратить проскальзывание. Это желательно, когда задействованы высокие крутящие моменты.
- Вал-шестерня : На некоторых валах прямо врезаны зубья шестерни. Обычно они предназначены для сопряжения с модульными зубчатыми передачами.
- Вал ходового винта : Двигатели с валом ходового винта используются для создания линейных приводов. Их миниатюрные версии можно найти в качестве позиционеров головок во многих дисководах.
 Обычно они предназначены для сопряжения с модульными зубчатыми передачами.
Обычно они предназначены для сопряжения с модульными зубчатыми передачами.Существует множество вариантов подключения шагового двигателя. Для наших целей мы сосредоточимся на шаговых двигателях, которыми можно управлять с помощью общедоступных драйверов. Это шаговые двигатели с постоянными магнитами или гибридные, подключенные как 2-фазные биполярные или 4-фазные униполярные.
Шаговый двигатель может иметь любое количество катушек. Но они соединены в группы, называемые «фазами». Все катушки в фазе находятся под напряжением вместе.
Униполярные драйверы всегда подают питание на фазы одинаковым образом. Одно отведение, «общее» отведение, всегда будет отрицательным. Другой вывод всегда будет положительным. Униполярные драйверы могут быть реализованы с помощью простой транзисторной схемы. Недостатком является то, что доступный крутящий момент меньше, потому что только половина катушек может быть запитана одновременно.
Другой вывод всегда будет положительным. Униполярные драйверы могут быть реализованы с помощью простой транзисторной схемы. Недостатком является то, что доступный крутящий момент меньше, потому что только половина катушек может быть запитана одновременно.
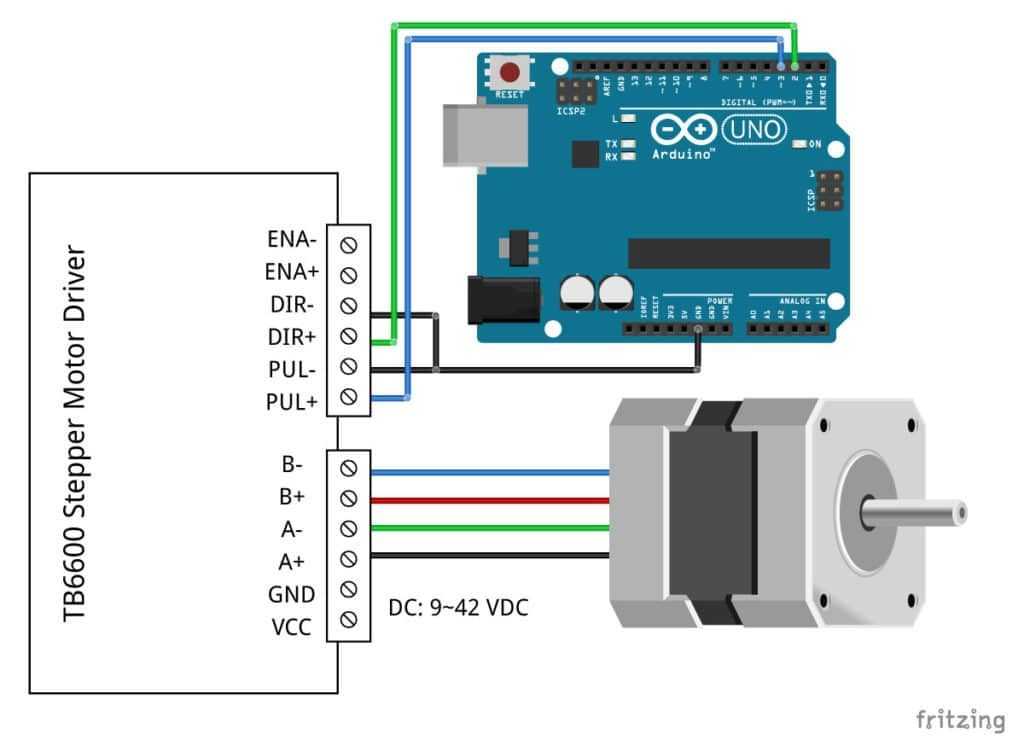
Драйверы Bipolar используют схему H-моста, чтобы фактически изменить направление тока, протекающего по фазам. При подаче питания на фазы с чередованием полярности все катушки можно заставить работать, вращая двигатель.
Двухфазный биполярный двигатель имеет 2 группы катушек. Четырехфазный униполярный двигатель имеет 4 провода. Двухфазный двухполярный двигатель будет иметь 4 провода — по 2 на каждую фазу. Некоторые двигатели поставляются с гибкой проводкой, которая позволяет использовать двигатель как биполярный, так и униполярный.
5-проводной двигатель
Этот тип распространен в небольших униполярных двигателях. Все общие провода катушки связаны внутри и выведены как 5-й провод. Этот двигатель может работать только как униполярный двигатель.
Этот двигатель может работать только как униполярный двигатель.
6-проводной двигатель
Этот двигатель подключается только к общим проводам двух парных фаз. Эти два провода можно соединить для создания 5-проводного униполярного двигателя.
Или вы можете просто игнорировать их и относиться к этому как к биполярному двигателю!
8-проводной двигатель
8-проводной униполярный двигатель является наиболее универсальным двигателем из всех. Его можно вести несколькими способами:
- 4-х фазный однополюсный – Все общие провода соединены вместе – как у 5-ти проводного двигателя.
- 2-фазный последовательный биполярный – Фазы соединены последовательно – так же, как 6-проводной двигатель.
- 2-фазный параллельный биполярный – Фазы соединены параллельно. Это приводит к уменьшению сопротивления и индуктивности в два раза, но требует удвоения тока для возбуждения. Преимуществом такой проводки является более высокий крутящий момент и максимальная скорость.
 Преимуществом такой проводки является более высокий крутящий момент и максимальная скорость.
Преимуществом такой проводки является более высокий крутящий момент и максимальная скорость. Что такое шаговый двигатель? Управление шаговым двигателем
Это руководство было впервые опубликовано 05 мая 2014 г. Оно было последним обновлено 05 мая 2014 г.
Эта страница (Типы степперов) последний раз обновлялась 26 апреля 2014 г.
Текстовый редактор на базе tinymce.
Четырехфазный шаговый двигатель | Диаграмма характеристик угла крутящего момента
Четырехфазный шаговый двигатель. Шаговый двигатель представляет собой особый тип синхронного двигателя, который предназначен для вращения на определенный угол (называемый шагом) при каждом электрическом импульсе, полученном его блоком управления. Типичные размеры шага составляют 7,5°, 15° или больше. Шаговый двигатель используется в системах управления положением с цифровым управлением в режиме разомкнутого контура. Входная команда представляет собой последовательность импульсов для поворота вала на заданный угол.
Использование шаговых двигателей дает два преимущества. Во-первых, это их совместимость с цифровыми системами, а во-вторых, для определения положения и скорости не требуются датчики, поскольку они получаются непосредственно путем подсчета входных импульсов и периодического подсчета, если требуется информация о скорости. Шаговые двигатели имеют широкий спектр применения; двигатели подачи бумаги в пишущих машинках и принтерах, позиционирование печатающих головок, ручек в XY-плоттерах, записывающих головок в дисководах компьютеров и позиционирование рабочих столов и инструментов в станочном оборудовании с числовым программным управлением. Диапазон применения этих двигателей расширяется, поскольку эти двигатели становятся доступными с большей номинальной мощностью и с меньшими затратами.
Элементарную работу четырехфазного шагового двигателя с двухполюсным ротором можно проиллюстрировать с помощью схемы на рис. 10.32.
Предположим, что ротор возбуждается постоянным магнитом. Такой ротор соосен с осью поля статора с крутящим моментом, пропорциональным греху θ, где θ представляет собой угол смещения между осью ротора и осью поля статора. На рис. 10.33(а) показана характеристика крутящего момента четырехфазного шагового двигателя с возбужденной фазой а, а также с возбужденной фазой b. Легко заметить, что устойчивое положение ротора соответствует тому углу, при котором крутящий момент равен нулю и положителен для меньших углов и отрицателен для больших углов. Таким образом, при возбужденной фазе a стабильное (или заблокированное) положение составляет θ = 0°, но не θ = 180° (неустойчивое), а крутящий момент имеет максимальное положительное значение при θ = – 90°. Поэтому легко сделать вывод, что каждая схема возбуждения фаз соответствует уникальному положению ротора. Следовательно, последовательность возбуждения a, b, c, d, a… заставляет ротор двигаться в прямой последовательности с шагом 90°.
Такой ротор соосен с осью поля статора с крутящим моментом, пропорциональным греху θ, где θ представляет собой угол смещения между осью ротора и осью поля статора. На рис. 10.33(а) показана характеристика крутящего момента четырехфазного шагового двигателя с возбужденной фазой а, а также с возбужденной фазой b. Легко заметить, что устойчивое положение ротора соответствует тому углу, при котором крутящий момент равен нулю и положителен для меньших углов и отрицателен для больших углов. Таким образом, при возбужденной фазе a стабильное (или заблокированное) положение составляет θ = 0°, но не θ = 180° (неустойчивое), а крутящий момент имеет максимальное положительное значение при θ = – 90°. Поэтому легко сделать вывод, что каждая схема возбуждения фаз соответствует уникальному положению ротора. Следовательно, последовательность возбуждения a, b, c, d, a… заставляет ротор двигаться в прямой последовательности с шагом 90°.
Если ротор находится в положении θ = 0, а a и b оба возбуждены, ротор сдвинется на 45°, что является стабильным положением (чистый крутящий момент из-за нулевого значения a и b и отрицательного наклона крутящего момента-угла). Таким образом, последовательность возбуждения a, a + b, b, b + c, c… заставляет ротор двигаться вперед с шагом 45°. Схемы возбуждения фазных обмоток могут быть легко визуализированы для шагов 22,5°, 11,25° и меньше на вход импульса в схему. Еще одна особенность шагового двигателя с постоянными магнитами заключается в том, что при возбуждении он ищет предпочтительное положение, которое дает преимущество в определенных приложениях.
Таким образом, последовательность возбуждения a, a + b, b, b + c, c… заставляет ротор двигаться вперед с шагом 45°. Схемы возбуждения фазных обмоток могут быть легко визуализированы для шагов 22,5°, 11,25° и меньше на вход импульса в схему. Еще одна особенность шагового двигателя с постоянными магнитами заключается в том, что при возбуждении он ищет предпочтительное положение, которое дает преимущество в определенных приложениях.
Предположим теперь, что ротор (выступающий полюс) сделан только из ферромагнитного материала (без постоянного магнита). Устройство теперь ведет себя как двигатель с переменным сопротивлением. Ферромагнитный ротор ищет положение, которое оказывает минимальное сопротивление полю статора, то есть ось ротора выравнивается с осью поля статора. На рис. 10.32 с возбужденной фазой a это происходит при θ = 0 °, а также при θ = 180 °, в которых крутящий момент на роторе равен нулю. При θ = 90° ротор оказывает бесконечное сопротивление оси фазы «а», поэтому крутящий момент там также равен нулю.