Арматура а1 это: Какая разница между классами арматуры
alexxlab | 08.03.2023 | 0 | Разное
Арматура А1 (А240)
Арматура А1 (А240) является одним из самых востребованных видов сортового металлопроката на отечественном рынке. Без нее невозможно представить ни один строительный объект. Ее активно применяют в качестве вспомогательного армирующего элемента ж/б конструкций. Она обеспечивает прочность и монолитность. Однако, в отличие от рифленой, гладкая арматура А240 выполняет скорее побочную роль и используется для скрепления стержни рифленой арматуры между собой.
По внешнему виду она представляет собой толстую проволоку без боковых насечек. Это является одновременно и преимуществом и недостатком.
- Из-за отсутствия рифления ее применение в бетонных конструкциях значительно ограничено. Она не может обеспечить такое же сцепление с бетоном, как изделие периодического профиля.
- Однако это одновременно уменьшает ее стоимость и вес. Такую арматуру гораздо проще изготавливать и поэтому стоимость ее меньше.
Внимание:
 Но это скорее исключение. Обычно гладкая арматура выпускается только одного класса: первого.
Но это скорее исключение. Обычно гладкая арматура выпускается только одного класса: первого.У нее есть также иное название: А240. Многие не понимают, от чего происходит это название. Здесь все просто: в ГОСТе разделение на классы происходит по пределу текучести изделия. Величина предела текучести для изделия класса А1 должна составлять 24 кгс/мм2. То есть А240 обозначает предел текучести помноженный на 10. Теперь вы знаете, откуда взялась такая маркировка.
Для изготовления применяют только следующие марки углеродистой стали: Ст3кп, Ст3пс, Ст3сп. Именно поэтому данное изделие применяется не только в строительстве, но и во многих других областях промышленности. Сталь марки Ст3 является самой универсальной и проще всего сваривается.
Что касается размера, то ГОСТ ограничивает его в пределах от 6 до 40 мм в диаметре. Поставка производится в мотках (при малом диаметре) либо в прутках от 6 до 12 метров мерной или немерной длины.
Наша компания занимается поставками Арматуры А1 (А240) и предлагает Вам сотрудничество. Оформить заказ Вы можете нескольким способами: прямо на сайте пользуясь корзиной или позвонив нашим специалистам.
Несомненным преимуществом работы с нами является то, что мы специализируемся на крупных поставках различных видов металлопроката. Мы поставляем трубы различного профиля, уголки, швеллеры, листы, круги и другие виды черного и цветного металлопроката. Работаем в рамках Государственного заказа.
Выбрать необходимый размер и заполнить корзину Вы можете пользуясь таблицей ниже:
| Наименование | Вес метра | Метров в тн. | Купить |
|---|---|---|---|
| Арматура 6 мм. А1 (А240) Горячекатаная, ГОСТ 5781-82 | 0.22 кг. | 4545.5 м. | тн.м.рифленаягладкая |
| Арматура 8 мм. А1 (А240) Горячекатаная, ГОСТ 5781-82 | 0. 4 кг. 4 кг. | 2500 м. | тн.м.рифленаягладкая |
| Арматура 10 мм. А1 (А240) Горячекатаная, ГОСТ 5781-82 | 0.62 кг. | 1612.9 м. | тн.м.рифленаягладкая |
| Арматура 12 мм. А1 (А240) Горячекатаная, ГОСТ 5781-82 | 0.89 кг. | 1123.6 м. | тн.м.рифленаягладкая |
| Арматура 14 мм. А1 (А240) Горячекатаная, ГОСТ 5781-82 | 1.21 кг. | 826.4 м. | тн.м.рифленаягладкая |
| Арматура 16 мм. А1 (А240) Горячекатаная, ГОСТ 5781-82 | 1.58 кг. | 632.9 м. | тн.м.рифленаягладкая |
| Арматура 18 мм. А1 (А240) Горячекатаная, ГОСТ 5781-82 | 2 кг. | 500 м. | тн.м.рифленаягладкая |
Арматура 20 мм. А1 (А240) А1 (А240) Горячекатаная, ГОСТ 5781-82 | 2.47 кг. | 404.9 м. | тн.м.рифленаягладкая |
| Арматура 22 мм. А1 (А240) Горячекатаная, ГОСТ 5781-82 | 2.98 кг. | 335.6 м. | тн.м.рифленаягладкая |
| Арматура 25 мм. А1 (А240) Горячекатаная, ГОСТ 5781-82 | 3.85 кг. | 259.7 м. | тн.м.рифленаягладкая |
| Арматура 28 мм. А1 (А240) Горячекатаная, ГОСТ 5781-82 | 4.83 кг. | 207 м. | тн.м.рифленаягладкая |
| Арматура 32 мм. А1 (А240) Горячекатаная, ГОСТ 5781-82 | 6.31 кг. | 158.5 м. | тн.м.рифленаягладкая |
| Арматура 36 мм. А1 (А240) Горячекатаная, ГОСТ 5781-82 | 7. 99 кг. 99 кг. | 125.2 м. | тн.м.рифленаягладкая |
| Арматура 40 мм. А1 (А240) Горячекатаная, ГОСТ 5781-82 | 9.87 кг. | 101.3 м. | тн.м.рифленаягладкая |
| Арматура 45 мм. А1 (А240) Горячекатаная, ГОСТ 5781-82 | 12.48 кг. | 80.1 м. | тн.м.рифленаягладкая |
| Арматура 50 мм. А1 (А240) Горячекатаная, ГОСТ 5781-82 | 15.41 кг. | 64.9 м. | тн.м.рифленаягладкая |
| Арматура 55 мм. А1 (А240) Горячекатаная, ГОСТ 5781-82 | 18.65 кг. | 53.6 м. | тн.м.рифленаягладкая |
| Арматура 60 мм. А1 (А240) Горячекатаная, ГОСТ 5781-82 | 22.19 кг. | 45.1 м. | тн.м.рифленаягладкая |
Арматура 70 мм. А1 (А240) А1 (А240) Горячекатаная, ГОСТ 5781-82 | 30.21 кг. | 33.1 м. | тн.м.рифленаягладкая |
| Арматура 80 мм. А1 (А240) Горячекатаная, ГОСТ 5781-82 | 39.46 кг. | 25.3 м. | тн.м.рифленаягладкая |
Арматура класса а1, основные характеристики и области применения
С каждым годом возрастает популярность металлопроката. Одним из таких является арматура класса а1. В настоящее время без него не обходится практически ни одна стройка. Широко используется для создания железобетонных изделий, а также металлических конструкций и деталей. Производят металлопрокат согласно государственному стандарту 5781−82.
- Характеристика арматуры а1
- Основные характеристики и свойства
- Области применения
Характеристика арматуры а1
Согласно ГОСТу, арматурой а1 называется арматура стальная или же а240. Это наиболее правильное и точное наименование этого материала среди профессиональных потребителей и заказчиков. На техническом языке стандарта 5781, в котором имеется классификация всех производимых арматурных и обычных сталей, а также предварительно напряженных железобетонных конструкций, это обозначение расшифровывают как арматура а1.
Это наиболее правильное и точное наименование этого материала среди профессиональных потребителей и заказчиков. На техническом языке стандарта 5781, в котором имеется классификация всех производимых арматурных и обычных сталей, а также предварительно напряженных железобетонных конструкций, это обозначение расшифровывают как арматура а1.
Разделение на классы производится по одной из механических характеристик арматурной стали, а именно по пределу текучести. Значение 240 указывается после индекса, А и означает предел текучести в кгс/мм 2, помноженный на 10, следовательно, значение его для этого материала составляет 24 кгс/мм 2.
Изготавливают рассматриваемую сталь только с гладким профилем без рифления поверхности правильно изготовленного круглого сечения. Внешне такая арматура напоминает стальную проволоку или пруток.
Изготавливается арматура а1 исключительно горячекатаной и из углеродистой стали ст3. Поэтому такая марка наиболее востребована как для армирования, так и в качестве обычного металлопроката при изготовлении других видов конструкций. Сталь 3 наиболее гибкая, пластичная, лучше всего поддается свариванию.
Поэтому такая марка наиболее востребована как для армирования, так и в качестве обычного металлопроката при изготовлении других видов конструкций. Сталь 3 наиболее гибкая, пластичная, лучше всего поддается свариванию.
Этот сортамент имеет 14 типоразмеров по диапазону диаметров от 6 до 40 миллиметров. Диаметры до 12 миллиметров делают стержнями или мотками, крупные изделия делаются только в виде прутков.
Основные характеристики и свойства
ГОСТ 5781 указывает такие параметры материала, как площадь поперечного сечения, вес 1 метра профиля и допустимые предельные отклонения от заданных параметров. Расчетная масса вычисляется, исходя из номинального диаметра без отклонений при плотности стали 7850 килограммов на кубический метр. Наименьший диаметр 6 миллиметров имеет массу 0,222 килограмма, а диаметр 40 миллиметров обладает массой почти 10 килограммов.
Согласно стандарту, допустимые отклонения от веса для прутков составляют:
- от +9 до -7 процентов 1 метра теоретического веса для диаметров 6 и 8 миллиметров.

- диаметры от 10 до 14 миллиметров допускают отклонения от +5 до -6 процентов.
- от 16 до 28 миллиметров предельные отклонения составляются от +3 до -5%.
- при диаметрах от 32 до 40 миллиметров отклонения составляют от +3 до -4 процентов.
Овальность гладкого материала не должна быть больше суммы допустимых отклонений диаметра. Кривизна проката не должна превышать 0,6 процента замеряемой длины. Есть и другие механические свойства, среди которых удлинение при изгибе 25 процентов, а сопротивление арматуры разрыву составляет 373 ньютона на квадратный миллиметр.
Имеются в госте требования и к качеству поверхности готовой стальной арматуры. Не должно быть трещин, рванин, прочих дефектов. Разрешаются отдельные отпечатки, наплывы, небольшая ржавчина, чешуйчатость и рябизна.
Области применения
Благодаря своим свойствам, этот материал используют во многих сферах, среди которых:
- Армирование железобетона;
- Армирование стальной арматуры более высокого класса;
- Для взаимной фиксации и упрочнения поверхности изделия;
- В качестве средства монолитной конструкции по типу плотин, шахт, мостов, аэродромов и других объектов.

Если нагрузка на железобетон позволяет, то арматурное изделие из стали применяют самостоятельно. Обычно ею усиливают колонны, фундаменты, балки и панели. Тонкое изделие диаметром 6 и 8 миллиметров применяется как проволока для обвязки и скрепления строительных сеток, армированных каркасов, армирования бетонных стяжек и пола, а также штукатурки.
Кроме того, арматура указанной марки активно применяется для производства декоративных, несущих, каркасных и иных металлических конструкций, деталей к ним и различному оборудованию и технологической оснастке. Применяется везде, где используется и обыкновенный металлопрокат из стали ст3.
Арматура а1 известна своими механическими и технологическими свойствами, а также прочностными характеристиками. Это позволяет использовать этот материал в различных строительных и промышленных сферах, включая укрепление железобетона и фундаментов. Допускается также и самостоятельное применение арматуры при допустимых нагрузках и качественном изготовлении.
Определение направления вращения двигателя постоянного тока
Хотя двигатели постоянного тока применяются в основном в специальных приложениях, знание того, как правильно их подключить, важно для обеспечения требуемой производительности.
Вы собираетесь подключить недавно отремонтированный или купленный двигатель постоянного тока к вашему промышленному вертикально-сверлильному станку или строгальному станку. Что нужно знать о проводах двигателя? Что означают обозначения лидов? Как определить правильное направление вращения?
Давайте рассмотрим некоторые основы и обсудим ответы на эти вопросы.
Подключение двигателя постоянного тока
Существует много способов подключения составного двигателя постоянного тока. Одно такое соединение называется коротким шунтирующим соединением. Как показано на рис. 1А, шунтирующее поле охватывает только якорь. При подключении короткого шунта двигателя шунтирующее поле добавляется к последовательному току возбуждения, в результате чего двигатель имеет более сильные характеристики крутящего момента.
Другое соединение возникает, когда шунтирующее поле охватывает как якорь, так и последовательное поле, как показано на рис. 1B. Это называется длинным шунтирующим соединением и позволяет двигателю лучше регулировать скорость.
Предположим, мы делаем соединения выводов двигателя, как показано на рис. 2А, так что магнетизм последовательного поля усиливает магнетизм, создаваемый шунтирующим полем. Затем двигатель становится так называемым кумулятивным составным двигателем.
Если мы реверсируем вышеуказанное соединение, так что магнетизм последовательного поля противостоит или ослабляет магнетизм шунтирующего поля, как показано на рис. 2B, двигатель становится так называемым дифференциальным составным двигателем.
Несмотря на то, что составной дифференциальный двигатель обеспечивает более постоянную скорость при всех нагрузках, он несколько нестабилен. Поэтому в большинстве приложений используются кумулятивные составные двигатели.
Идентификация клемм двигателя постоянного тока
Выводы клемм двигателя постоянного тока помечены для облегчения идентификации в клеммной коробке двигателя. Например, выводы с маркировкой «А1» и «А2» подключаются к якорю через щетки двигателя; отведения с маркировкой «S1» и «S2» являются концами последовательного поля; а отведения, обозначенные «F1» и «F2», являются концами поля шунта.
Например, выводы с маркировкой «А1» и «А2» подключаются к якорю через щетки двигателя; отведения с маркировкой «S1» и «S2» являются концами последовательного поля; а отведения, обозначенные «F1» и «F2», являются концами поля шунта.
При наличии промежуточных полюсов выводы этих обмоток выводятся в клеммную коробку и маркируются “C1” и “C2” или “S3” и “S4”. На самом деле, большинство машин, предназначенных для использования в качестве двигателей или генераторов, имеют легкодоступные провода.
Определение направления вращения
Вы можете узнать направление вращения двигателя постоянного тока, посмотрев на его конец коллектора, который обычно находится сзади или сзади двигателя, и отметив обозначение вывода. Предположим, у вас есть серийный двигатель, как показано на рис. 3 (на стр. 36). Если его обмотки помечены стандартным образом, вы можете изменить направление, просто поменяв местами выводы якоря. То же самое можно сделать с параллельным двигателем, как показано на рис. 4 (на стр. 36), и комбинированным двигателем, как показано на рис. 5 (на стр. 36).
4 (на стр. 36), и комбинированным двигателем, как показано на рис. 5 (на стр. 36).
Вы также можете изменить направление, поменяв местами выводы поля; однако вы рискуете заменить кумулятивный составной двигатель, который по своей природе стабилен, на дифференциальный составной двигатель, который несколько нестабилен.
СВЯЗАННАЯ СТАТЬЯ: НЕКОТОРЫЕ ОСНОВЫ ДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА
Вращающийся якорь и стационарное поле являются основными компонентами составного двигателя постоянного тока. Якорь имеет обмотку, соединенную с вращающимся коллектором. На этом коммутаторе установлены угольные щетки. Стационарное поле служит корпусом или рамой.
Двигатель со смешанной обмоткой имеет две отдельные обмотки возбуждения: шунтирующая обмотка, намотанная проводом меньшего размера и состоящая из тысяч витков, и последовательная обмотка, намотанная проводом большого диаметра и имеющая всего несколько витков. Эти обмотки возбуждения или катушки размещены на полюсных наконечниках, прикрепленных к раме двигателя.
Части последовательной и шунтирующей обмоток возбуждения наматывают на каждый полюсной наконечник, причем каждая обмотка выполняется против часовой и против часовой стрелки. (Все составные двигатели постоянного тока имеют четное число полюсов; двигатели меньшего размера обычно имеют два или четыре полюса, в то время как большие размеры имеют большее количество полюсов.) Таким образом, каждый полюсный наконечник попеременно намагничен на север и юг. Два конца каждой шунтирующей и последовательной обмоток выводятся на клеммную коробку двигателя.
Коммутирующие полюса или промежуточные полюса представляют собой небольшие полюсные наконечники, расположенные посередине между основными полюсными наконечниками. Они постоянно соединены последовательно со щетками якоря и считаются частью цепи якоря. Межполюсники также намотаны попеременно по часовой стрелке/против часовой стрелки и противодействуют искажению магнетизма поля, вызванному вращением сильно намагниченного якоря в потоке поля. Таким образом исключается искрение щеток или искрение.
Таким образом исключается искрение щеток или искрение.
ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА СО СТАЦИОНАРНЫМ ЯКОРОМ И ВОЗДУШНЫМ
Это изобретение было сделано служащим правительства Соединенных Штатов и может быть использовано правительством или для правительства в государственных целях без выплаты каких-либо гонораров за него или за него.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
С момента открытия взаимодействия проводника, несущего электрический ток, в магнитном поле, двигатели постоянного тока были построены с тремя основными частями – якорем, полем и коммутатором. Поскольку поток поля стационарен во времени, он может создаваться как постоянными магнитами, так и электромагнитами. В обычных двигателях постоянного тока постоянного тока поле установлено в неподвижном положении в корпусе двигателя, а якорь установлен на вращающемся валу. Поскольку ток, протекающий в якоре, должен изменяться в зависимости от положения якоря по отношению к потоку поля, должны быть предусмотрены средства изменения тока, протекающего в якоре. Обычно это средство включает в себя скользящие контакты коммутатора. В частности, коммутатор с помощью неподвижных щеток последовательно подает питание на ряд выводов якоря по мере вращения якоря. Клеммы электрически соединены с набором коллекторных «стержней», установленных на части поверхности ротора, на которую опираются щетки. Существует соответствующее угловое соотношение между расположением коллекторных стержней и щеток, так что происходит взаимодействие между током, протекающим в якоре, и магнитным потоком, создаваемым полем. Это взаимодействие вызывает действие вращательного двигателя.
Обычно это средство включает в себя скользящие контакты коммутатора. В частности, коммутатор с помощью неподвижных щеток последовательно подает питание на ряд выводов якоря по мере вращения якоря. Клеммы электрически соединены с набором коллекторных «стержней», установленных на части поверхности ротора, на которую опираются щетки. Существует соответствующее угловое соотношение между расположением коллекторных стержней и щеток, так что происходит взаимодействие между током, протекающим в якоре, и магнитным потоком, создаваемым полем. Это взаимодействие вызывает действие вращательного двигателя.
Из-за механических и электрических нагрузок на скользящие контакты (щетки и стержни) коллектор является наиболее подверженным износу элементом двигателя постоянного тока. В нормальных условиях эксплуатации необходимо частое техническое обслуживание, обычно требующее замены щеток. А в определенных условиях, например, на больших высотах и в космосе, обычные материалы для щеток выходят из строя преждевременно и часто катастрофически. Следовательно, желательно и часто необходимо исключить скользящие контакты из двигателя постоянного тока.
Следовательно, желательно и часто необходимо исключить скользящие контакты из двигателя постоянного тока.
Чтобы решить проблему с коммутатором, недавно были разработаны двигатели постоянного тока с электронной коммутацией (бесщеточные). В этих устройствах функция коммутатора разделена. Датчики (оптические, емкостные или электромагнитные) определяют угловое положение вращающегося элемента двигателя. Транзисторные или другие полупроводниковые переключатели управляются датчиками, так что они подают питание на соответствующие клеммы якоря в соответствующих точках рабочего цикла. Более конкретно, бесщеточные двигатели постоянного тока предшествующего уровня техники инвертировали обычную схему двигателя; то есть якорь установлен в стационарном положении, а поле установлено на вращающемся валу. Поле формируется из материала с постоянными магнитами, поэтому его не нужно подключать к внешнему источнику энергии, например, через токосъемные кольца. Ток якоря переключается полупроводниковыми переключателями в соответствии с измеренным положением ротора, чтобы обеспечить требуемый ток. Если контактные кольца (а не постоянный магнит) используются для обеспечения питания поля и создания потока поля, возникают проблемы, связанные с работой коммутатора. Это и является причиной использования ротора с постоянными магнитами.
Если контактные кольца (а не постоянный магнит) используются для обеспечения питания поля и создания потока поля, возникают проблемы, связанные с работой коммутатора. Это и является причиной использования ротора с постоянными магнитами.
Несмотря на то, что бесщеточные двигатели постоянного тока, использующие поле постоянного магнита и электрически переключаемый якорь, нашли широкое применение, их характеристики ограничены. В частности, они демонстрируют соотношение крутящего момента с фиксированной скоростью, которое нельзя изменить, и единую точку пикового КПД в зависимости от нагрузки. Кроме того, в некоторых случаях желательно иметь возможность использовать специальные характеристики обычного двигателя постоянного тока, такие как последовательное, параллельное или составное соединение обмотки возбуждения, а также иметь возможность переключаться с одного типа соединения на другой тип соединения. Эти результаты не могут быть получены с бесщеточными двигателями постоянного тока предшествующего уровня техники без повторного введения токосъемных колец или других сложных элементов, таких как вращающиеся трансформаторы и выпрямители, расположенные на подвижном элементе.
Таким образом, целью настоящего изобретения является создание нового улучшенного бесщеточного двигателя постоянного тока.
Также целью настоящего изобретения является обеспечение характеристик последовательного, параллельного и составного двигателя постоянного тока в двигателе постоянного тока с электронной коммутацией.
Еще одной целью настоящего изобретения является создание бесщеточного электродвигателя постоянного тока, обладающего гибкостью управления.
Еще одной задачей настоящего изобретения является создание надежного и эффективного бесщеточного двигателя постоянного тока с регулируемым возбуждением, в котором исключены подверженные износу элементы, устранено рассеивание мощности вращающегося узла, а также снижены механические и магнитные потери во вращающейся конструкции.
Еще одной целью настоящего изобретения является создание двигателя постоянного тока, в котором вращаются только явно выраженные полюса двигателя, тем самым уменьшая инерцию двигателя и улучшая время отклика двигателя.
Еще одной целью настоящего изобретения является создание бесщеточного двигателя постоянного тока с электрически управляемым направлением крутящего момента и реверсивностью крутящего момента.
Еще одной целью настоящего изобретения является создание бесщеточного двигателя постоянного тока, который может создавать управляемые динамические тормозные моменты, а также управляемые ускоряющие моменты.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В соответствии с принципом настоящего изобретения создан двигатель постоянного тока, имеющий стационарный якорь и стационарный источник магнитного поля. Ротор, выполненный из магнитного материала с высокой магнитной проницаемостью, установлен с возможностью вращения рядом со стационарным источником магнитного поля. Ротор включает в себя множество выступающих полюсов или зубцов, которые обеспечивают потокосцепление для потока поля. Поток поля взаимодействует с током, проходящим через якорь. Это взаимодействие заставляет ротор двигаться, тем самым создавая вращательное движение.
В соответствии с другим принципом данного изобретения ток якоря регулируется полупроводниковой системой переключения. Твердотельная система включает в себя датчик для определения местоположения ротора. Средство измерения соединено со средством переключения, которое управляет подачей тока на якорь. Таким образом обеспечивается переменный ток якоря. Более конкретно, обмотки якоря последовательно запитываются, чтобы создать поле якоря, которое взаимодействует с потоком поля, вызывая движение ротора.
В соответствии с еще одним принципом настоящего изобретения стационарный источник магнитного поля содержит множество обмоток, находящихся под напряжением. Эти обмотки с помощью соответствующих средств управления могут быть соединены либо последовательно, либо в шунтирующую, либо в составную конфигурацию.
В соответствии с еще одним принципом данного изобретения стационарный якорь и стационарный источник магнитного поля имеют круглую форму и установлены концентрически вокруг общей оси. А зубья ротора проходят через отверстие между якорем и источником магнитного поля.
А зубья ротора проходят через отверстие между якорем и источником магнитного поля.
В соответствии с еще одним принципом настоящего изобретения стационарный якорь и стационарный источник магнитного поля имеют круглую форму и установлены концентрически вокруг общей оси. При этом зубья ротора вращаются в плоскостях по обе стороны от якоря и источника магнитного поля.
В соответствии с еще одним принципом данного изобретения неподвижный якорь и стационарный источник магнитного поля монтируются рядом с ротором. При этом зубья ротора проходят мимо якоря и источника магнитного поля.
Из вышеприведенного описания следует, что изобретение обеспечивает бесщеточный двигатель постоянного тока, имеющий электромагнитный якорь и источник электромагнитного поля. Поскольку источник поля электромагнитный, он может быть шунтовым, последовательным или составным. Кроме того, поскольку источник магнитного поля является стационарным, в контактных кольцах нет необходимости. Кроме того, поскольку поток, наведенный на зубья ротора стационарным источником магнитного поля, не показывает изменения магнитного сопротивления при вращении, передача происходит практически без потерь.
Из вышеприведенного описания также следует, что изобретение является недорогим и несложным в электрическом, магнитном и механическом отношении. Кроме того, поскольку источник магнитного потока может быть подключен в различных конфигурациях, изобретение является гибким. Кроме того, поскольку мощность, подаваемая на источник магнитного поля, легко регулируется, крутящий момент и скорость двигателя легко регулируются. Следовательно, может быть обеспечено либо медленное, либо быстрое время отклика. Также помогает быстрое время отклика, поскольку вращается только ротор, а не ротор и источник магнитного поля.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Вышеизложенные цели и многие из сопутствующих преимуществ настоящего изобретения станут более понятными по мере того, как они станут более понятными при обращении к следующему подробному описанию в сочетании с прилагаемыми чертежами, на которых:
РИС. 1 представляет собой схему магнитной цепи, иллюстрирующую один вариант осуществления изобретения, показывающую половину поперечного сечения двигателя относительно оси вращения.
РИС. 2 представляет собой схему магнитной цепи, иллюстрирующую второй вариант осуществления изобретения, показывающую половину поперечного сечения двигателя относительно оси вращения.
РИС. 3 представляет собой вид в разрезе варианта конструкции двигателя постоянного тока, выполненного в соответствии со схемой магнитной цепи, показанной на фиг. 1.
РИС. 4 представляет собой изображение ротора, который является частью двигателя, показанного на фиг. 3.
РИС. 5 – вид в разрезе альтернативного варианта конструкции двигателя постоянного тока, выполненного в соответствии со схемой магнитной цепи, показанной на фиг. 2.
РИС. 6 представляет собой изображение элементов двигателя, которые составляют часть варианта осуществления изобретения, показанного на фиг. 5.
РИС. 7 представляет собой вид еще одного альтернативного варианта конструкции двигателя постоянного тока, выполненного в соответствии с изобретением.
РИС. 8 представляет собой сечение якоря, источника магнитного поля и ротора варианта осуществления изобретения, показанного на фиг. 7; и
7; и
РИС. 9 представляет собой принципиальную схему электронного коммутатора, подходящего для управления якорем и источником магнитного поля структурных вариантов осуществления изобретения, показанных на фиг. 3–8.
ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ВОПЛОЩЕНИЯ
ФИГ. 1 и 2 представляют собой схемы магнитных цепей, которые иллюстрируют основную теорию работы изобретения и используются для описания этой теории работы. Элементы, показанные на фиг. 1, содержат: стационарную катушку 11 возбуждения, окруженную U-образным сердечником 13 возбуждения; якорь 15, окруженный обмоткой якоря 17; и пару элементов 19 и 21 ротора, которые проходят через пространство между магнитом возбуждения и якорем, оставляя зазоры с обеих сторон. Элементы ротора представляют собой элементы с выступающими полюсами, изготовленные из магнитного материала с высокой магнитной проницаемостью и вращающиеся вокруг оси вращения, показанной справа на рисунке линией 23. И катушка возбуждения, и магнит возбуждения неподвижны, как и якорь и обмотки якоря.
Во время работы обмотка якоря и катушка возбуждения находятся под напряжением. Катушка возбуждения создает путь магнитного потока, который существует вдоль темной линии. Поскольку этот путь проходит через полюса элементов ротора, в нем индуцируется магнитный поток. Магнитный поток, наведенный в элементах ротора, пытается взаимодействовать с током, проходящим через обмотки или катушки якоря, как это обычно бывает с двигателями. Из-за этого взаимодействия на выступающие полюса действуют силы, заставляющие их двигаться. Когда элементы ротора движутся, токи якоря переключаются, так что эти силы продолжают действовать, вызывая движение в том же направлении, что приводит к непрерывной работе вращающегося двигателя. Следовательно, без скользящих контактов или токосъемных колец изобретение создает поток постоянного поля, который взаимодействует с током якоря, создавая вращательное движение.
РИС. 2 представляет собой схему магнитной цепи, иллюстрирующую альтернативную конфигурацию основных элементов изобретения, показанных на фиг.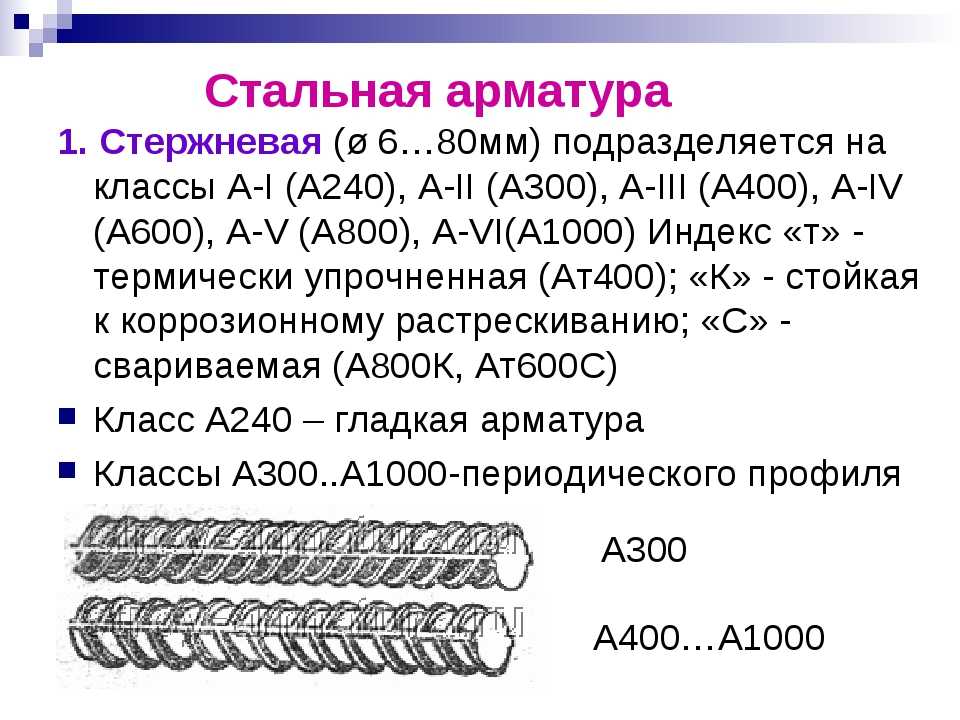 1. Как показано на фиг. 2, ротор 25, который обычно имеет U-образную форму в поперечном сечении, имеет концы или выступающие полюса, которые выступают над якорем 27. Якорь окружен обмотками якоря 29. Катушка возбуждения 31 установлена внутри U ротора рядом с поперечина U-образного ротора. Ось вращения проходит вдоль внешнего края поперечины U-образного ротора, как показано вертикальной линией справа на фиг. 2. Путь потока, создаваемого катушкой возбуждения, проходит по темной линии, проходящей через ротор 25 и якорь 27. Как и в конфигурации, показанной на фиг. 1, как якорь 27, так и поле 31 неподвижны. И ток якоря, поскольку катушки тока якоря последовательно запитываются, вызывает перемещение полюсов ротора, вызывая вращательное движение вокруг оси вращения.
1. Как показано на фиг. 2, ротор 25, который обычно имеет U-образную форму в поперечном сечении, имеет концы или выступающие полюса, которые выступают над якорем 27. Якорь окружен обмотками якоря 29. Катушка возбуждения 31 установлена внутри U ротора рядом с поперечина U-образного ротора. Ось вращения проходит вдоль внешнего края поперечины U-образного ротора, как показано вертикальной линией справа на фиг. 2. Путь потока, создаваемого катушкой возбуждения, проходит по темной линии, проходящей через ротор 25 и якорь 27. Как и в конфигурации, показанной на фиг. 1, как якорь 27, так и поле 31 неподвижны. И ток якоря, поскольку катушки тока якоря последовательно запитываются, вызывает перемещение полюсов ротора, вызывая вращательное движение вокруг оси вращения.
Из предшествующего описания фиг. 1 и 2, следует понимать, что изобретение относится к новому устройству, которое в основном содержит стационарное поле и подвижный ротор. Поле индуцирует магнитный поток в полюсах ротора. Затем поток ротора взаимодействует с током якоря, создавая крутящий момент вокруг оси вращения ротора. Именно этот крутящий момент заставляет ротор вращаться, что приводит к работе двигателя.
Затем поток ротора взаимодействует с током якоря, создавая крутящий момент вокруг оси вращения ротора. Именно этот крутящий момент заставляет ротор вращаться, что приводит к работе двигателя.
РИС. 3 и 4 иллюстрируют один вариант осуществления изобретения, в котором конфигурация элемента, показанная на фиг. 1 используется. Вариант осуществления изобретения, показанный на фиг. 3 и 4, включает катушку возбуждения 11, магнит возбуждения 13, якорь 15 и обмотки якоря 17. Кроме того, элементы ротора или явно выраженные полюса 19и 21 проиллюстрированы. Обмотки якоря представляют собой множество обмоток, намотанных на якорь обычным образом.
Как и на РИС. 1, полевое железо 13 имеет U-образное поперечное сечение. Кроме того, внешняя конфигурация полевого железа имеет круглую форму с выступающими внутрь рукавами. Катушка 11 возбуждения установлена между плечами и поперечиной U. Электромагнит возбуждения 13 жестко прикреплен к внутренней стороне внешнего цилиндрического элемента корпуса 33. Элемент корпуса имеет множество пазов 35 для излучения тепла.
Элемент корпуса имеет множество пазов 35 для излучения тепла.
Якорь 15 неподвижно прикреплен к невращающемуся валу 37 с помощью кольца 39. Кольцо прикреплено к валу с помощью штифта 41. Вал прикреплен к переднему и заднему элементам корпуса 43 и 45, которые, в свою очередь, прикреплены к цилиндрический элемент корпуса 33. Вал выполнен неподвижным за счет соединения с рычагом 47 с помощью штифта 49. Рычаг, в свою очередь, соединен с задним элементом корпуса 45 с помощью пальца 51.
Устанавливается на валу 37 рядом с передним корпусом Элемент 43 представляет собой передний подшипник 53. Точно так же на валу рядом с задним элементом 45 корпуса установлен задний подшипник 55. На переднем подшипнике 53 установлен опорный конус 57 переднего ротора, а на заднем подшипнике 55 установлен задний ротор. опорный конус 59.
К опорному конусу 57 переднего ротора прикреплена передняя секция 61 ротора, которая лучше всего показана на РИС. 4. Точно так же к опорному конусу 59 заднего ротора прикреплена секция 63 заднего ротора. Каждая передняя и задняя секции ротора имеют кольцеобразную форму и имеют элементы ротора или выступающие полюса, которые выступают с одной стороны в направлении, параллельном центральной оси. кольца. Предпочтительно передняя и задняя секции ротора выполнены из магнитных материалов с высокой магнитной проницаемостью. Выступающие полюса передней и задней секций ротора выступают друг над другом, как показано на фиг. 4. То есть полюса передней секции 61 ротора выступают между полюсами задней секции 63 ротора и наоборот. Кроме того, как показано на фиг. 3, полюса выступают в пространство между сердечником 13 возбуждения и якорем 15. Между полюсами установлен элемент 66 прокладки ротора, выполненный из немагнитного материала. Как показано на фиг. 3, элемент 66 распорки ротора прикреплен к передней и задней секциям 61 и 63 ротора в точках, противоположных полюсам другой секции.
Каждая передняя и задняя секции ротора имеют кольцеобразную форму и имеют элементы ротора или выступающие полюса, которые выступают с одной стороны в направлении, параллельном центральной оси. кольца. Предпочтительно передняя и задняя секции ротора выполнены из магнитных материалов с высокой магнитной проницаемостью. Выступающие полюса передней и задней секций ротора выступают друг над другом, как показано на фиг. 4. То есть полюса передней секции 61 ротора выступают между полюсами задней секции 63 ротора и наоборот. Кроме того, как показано на фиг. 3, полюса выступают в пространство между сердечником 13 возбуждения и якорем 15. Между полюсами установлен элемент 66 прокладки ротора, выполненный из немагнитного материала. Как показано на фиг. 3, элемент 66 распорки ротора прикреплен к передней и задней секциям 61 и 63 ротора в точках, противоположных полюсам другой секции.
Часть опорного конуса 59 заднего ротора образует шкив 65, который лучше всего показан на фиг. 4. Вокруг шкива 65 закреплен ремень 67, который лучше всего показан на фиг. 3. Понятно, что могут быть предусмотрены альтернативные способы использования мощности двигателя. В этом методе, когда ротор вращается, шкив перемещается и приводит в действие свою нагрузку обычным образом.
3. Понятно, что могут быть предусмотрены альтернативные способы использования мощности двигателя. В этом методе, когда ротор вращается, шкив перемещается и приводит в действие свою нагрузку обычным образом.
Также показано на РИС. 3 показана световая структура 73 с фотоэлементом, которая работает как средство определения положения. Световая структура фотоэлемента 73 взаимодействует с кольцеобразным элементом 69 разделения света.прикреплен к переднему опорному конусу 57 ротора на стороне, противоположной передней секции 61 ротора. Кольцеобразный элемент 69 измельчения света имеет множество отверстий 71, подробно показанных на фиг. 4, расположенный по его периферии. Отверстия расположены под заданным углом к полюсам передней и задней секций 61 и 63 ротора. Эти отверстия проходят между фотоэлементом 77 и лампой 79, установленной в световой конструкции 73 с фотоэлементом. лампа и фотоэлемент, свет определяется фотоэлементом.
Лампа 79 подключена к источнику питания проводами 85, которые проходят через отверстие 87 в конструкции фотоэлемента 73. Фотоэлемент 77 подключен к схеме управления, такой как схема, показанная на фиг. 9 и далее описано проводами 89, которые проходят через отверстие 91 в световой конструкции 73 с фотоэлементом.
Фотоэлемент 77 подключен к схеме управления, такой как схема, показанная на фиг. 9 и далее описано проводами 89, которые проходят через отверстие 91 в световой конструкции 73 с фотоэлементом.
Хотя на фиг. 3, следует понимать, что множество таких структур будет расположено в заранее определенных угловых положениях в переднем корпусе 43. Следовательно, предусмотрено множество точек измерения, которые используются, как описано ниже, для управления потоком тока через якорь. обмотки 17.
Из вышеизложенного следует, что довольно несложная структура для реализации идеи изобретения, показанной на фиг. 1 обеспечивается устройством, показанным на фиг. 3 и 4. Энергия к обмоткам якоря 17 подводится проводами 93, которые проходят через отверстие 95 вдоль оси вала 37. Провода проходят через второе отверстие 97 сбоку вала и крепятся к обмоткам якоря. 17. Энергия, подаваемая на обмотку якоря, переключается по схеме, показанной на фиг. 9, так что обеспечивается подвижный ток якоря. Катушка возбуждения 11 создает магнитный поток на полюсах 19 и 21, как показано на фиг. 1 и ранее описанным. Магнитный поток полюса взаимодействует с током движущегося якоря, так что полюса 19 и 21 стремятся двигаться. Это движение создает крутящий момент и вращательное движение, которое передается ремнем 67 на нагрузку.
1 и ранее описанным. Магнитный поток полюса взаимодействует с током движущегося якоря, так что полюса 19 и 21 стремятся двигаться. Это движение создает крутящий момент и вращательное движение, которое передается ремнем 67 на нагрузку.
РИС. 5 и 6 иллюстрируют альтернативный вариант конструкции согласно изобретению, в котором используется расположение элементов, показанное на фиг. 2. Вариант осуществления, показанный на фиг. 5 и 6 содержит ротор 25, якорь 27, обмотку якоря 29.и катушку возбуждения 31. Ротор содержит передний и задний элементы 99 и 101 и металлическую втулку 115. Как видно на фиг. 6, каждый элемент представляет собой круглый кусок магнитного материала с высокой магнитной проницаемостью, имеющий множество выступающих наружу выступающих полюсов. Вся конструкция лежит в одной плоскости, при этом плоскости передней и задней секций установлены параллельно вокруг вала 103, показанного на фиг. 5.
Вал установлен с возможностью вращения в переднем и заднем подшипниках 105 и 107, удерживаемых в корпусе 109. Корпус содержит U-образную в поперечном сечении цилиндрическую заднюю часть 111 и переднюю пластину 113. Передний и задний подшипники установлены в передней пластине и задней части соответственно. Внутри U-образной задней секции неподвижно закреплен круглый якорь 27 с прорезями 28 (фиг. 6), через которые намотаны обмотки 29 якоря. Внутри обмоток якоря установлена круглая катушка возбуждения 31. Катушка возбуждения удерживается в стационарном положении любым подходящим способом. Внутри катушки возбуждения 31 концентрично установлена металлическая втулка 115, которая жестко прикреплена к переднему и заднему элементам 9 ротора.9 и 101. Кроме того, на валу 103 жестко закреплена втулка 115.
Корпус содержит U-образную в поперечном сечении цилиндрическую заднюю часть 111 и переднюю пластину 113. Передний и задний подшипники установлены в передней пластине и задней части соответственно. Внутри U-образной задней секции неподвижно закреплен круглый якорь 27 с прорезями 28 (фиг. 6), через которые намотаны обмотки 29 якоря. Внутри обмоток якоря установлена круглая катушка возбуждения 31. Катушка возбуждения удерживается в стационарном положении любым подходящим способом. Внутри катушки возбуждения 31 концентрично установлена металлическая втулка 115, которая жестко прикреплена к переднему и заднему элементам 9 ротора.9 и 101. Кроме того, на валу 103 жестко закреплена втулка 115.
К переднему элементу ротора 99 стационарно или неподвижно прикреплен измельчающий диск 117. Измельчающий диск вращается вместе с вращающимися элементами ротора и имеет множество отверстий, проходящих между лампой 119 и фотодатчиком 121. Лампа, отверстия и фотодатчик работают аналогично работе их соответствующих элементов на фиг. 3 и 4 для подачи сигналов, которые используются для управления протеканием тока через обмотку якоря 29..
3 и 4 для подачи сигналов, которые используются для управления протеканием тока через обмотку якоря 29..
Двигатель, показанный на РИС. 5 и 6 работает аналогично работе теоретического варианта осуществления, показанного на фиг. 2. То есть катушка возбуждения 31 создает магнитный поток в явно выраженных полюсах переднего и заднего элементов 99 и 101 ротора, и ток якоря взаимодействует с потоком, создавая вращательное движение, когда ток якоря переключается заданным образом.
Следует понимать, что варианты осуществления изобретения, показанные на фиг. 3 и 4, и 5 и 6 представляют собой бесщеточные двигатели постоянного тока, обладающие всеми преимуществами двигателей щеточного типа предшествующего уровня техники. То есть обмотка возбуждения может быть соединена последовательно, шунтирующим или составным образом, чтобы получить преимущества каждого конкретного соединения без использования щеток или токосъемных колец. Следовательно, преимущества двигателей постоянного тока предшествующего уровня техники сохраняются без их недостатков.
РИС. 7 и 8 иллюстрируют альтернативный вариант конструкции согласно изобретению, в котором большое колесо приводится во вращение под действием описанного здесь эффекта магнитной связи. Вариант осуществления, показанный на фиг. 7 и 8, содержит большое колесо 131, имеющее внешнюю периферию, состоящую из множества взаимосвязанных, но разделенных зубьев, подобных полюсам 19 и 21 на фиг. 3 или 4. Этот кольцеобразный элемент соединен множеством распорных элементов 133 с внутренней ступицей 135. Вал 137 проходит через ступицу 135 и отделен от нее подшипником 139.. Вал 137 удерживается неподвижно; следовательно, колесо 131 может вращаться вокруг него.
Полюса колеса 131 проходят через приводную конструкцию 141, которая включает в себя катушку 143 возбуждения и якорь 145. На фиг. 8 показано поперечное сечение приводной конструкции 141.
Катушка возбуждения 143 установлена вокруг стойки 147. С обеих сторон стойки установлены и выступают в сторону колеса 131 верхний и нижний железные элементы 149 и 151. Такой способ установки позволяет магнитному пути существовать через полюса колеса 131 и поле 143. Установлен между верхним и нижним металлическими элементами 149и 151, и около его внешних концов находится опора 152 якоря. На опоре 152 якоря закреплен якорь 153, и вокруг якоря 153 намотана обмотка 155 якоря.
Такой способ установки позволяет магнитному пути существовать через полюса колеса 131 и поле 143. Установлен между верхним и нижним металлическими элементами 149и 151, и около его внешних концов находится опора 152 якоря. На опоре 152 якоря закреплен якорь 153, и вокруг якоря 153 намотана обмотка 155 якоря.
Вариант осуществления изобретения, показанный на ФИГ. 7 и 8 работает идентично другим вариантам осуществления изобретения. То есть поле индуцирует магнитный поток в явных полюсах, примыкающих к полевому железу в любой конкретный момент. Этот поток взаимодействует с током, протекающим в обмотках якоря. Взаимодействие между током якоря и потоком поля приводит к перемещению полюсов. При желании колебания якоря можно контролировать извне или коммутировать с помощью датчика, установленного рядом с колесом, показанным на фиг. 7. В любом случае должны быть предусмотрены подходящие средства управления для управления потоком тока через обмотки якоря, чтобы вызвать желаемое действие ротора или колеса.
Вариант осуществления изобретения, показанный на фиг. 7 и 8, можно использовать в условиях, когда желательно обеспечить большой крутящий момент для перемещения крупных предметов. Например, вариант осуществления изобретения можно использовать для управления выдвижением солнечных лопастей в космическом корабле. Удлинение солнечных лопастей требует низкой скорости и высокого крутящего момента. И вариант осуществления изобретения, показанный на фиг. 7 и 8 адаптированы для низкой скорости и высокого крутящего момента.
РИС. 9представляет собой принципиальную схему типичной схемы управления, подходящей для управления прохождением тока в якоре и обмотках возбуждения описанных выше вариантов осуществления изобретения. В целях иллюстрации полностью описан только один канал управления. Однако следует понимать, что число каналов управления равно количеству фаз обмотки якоря. Например, если, как показано на фиг. 9, в двигатель должна быть включена трехфазная обмотка якоря, должны быть предусмотрены три чувствительных элемента и каналы управления.
Схема управления, показанная на РИС. 9 включает разделенную обмотку возбуждения, состоящую из катушек F1 и F2. Один конец F1 подключен к источнику положительного напряжения V+. Другой конец F1 подключен к одному концу F2, а другой конец F2 подключен к коллектору полевого транзистора Q1 управления. База транзистора управления полем Q1 соединена с входной клеммой управления полем. Эмиттер Q1 подключен к земле или источнику отрицательного напряжения (V-). Соединение между F1 и F2 соединяется с центром трех обмоток якоря A1, A2 и A3, соединенных звездой.
Открытый конец A1 подключен к коллектору первого якорного переключающего транзистора Q2. Эмиттер Q2 подключен через первый резистор R1 к земле или V-. Точно так же открытый конец A2 подключен к коллектору второго якорного переключающего транзистора Q3, а эмиттер Q3 подключен через R1 к земле или V-. И открытый конец A3 подключен к коллектору третьего якорного переключающего транзистора Q4, а эмиттер Q4 подключен через R1 к земле или V-. Q2, Q3 и Q4 управляют протеканием тока через соответствующие обмотки якоря A1, A2 и A3.
Q2, Q3 и Q4 управляют протеканием тока через соответствующие обмотки якоря A1, A2 и A3.
Для ясности, как указано выше, показано только базовое соединение Q2. База Q2 подключена к эмиттеру управляющего транзистора Q5, а коллектор Q5 подключен через второй резистор R2 к V+. База Q5 подключена к эмиттеру фотоприемного транзистора P1. Коллектор P1 подключен через третий резистор R3 к источнику напряжения V+.
Основание P1 монтируется в конструкциях двигателей, описанных выше, для обнаружения света от лампы, когда отверстие в режущем диске или режущем элементе проходит между лампой и фототранзистором. База транзистора Q5 также подключена через пару диодов D1 и D2, соединенных последовательно, к входу управления якорем. Вход управления якорем также подключается через четвертый резистор R4 к земле или V-. Другие диоды D3 и D4 для других каналов подключены к переходу между D1 и D2. Все транзисторы являются транзисторами NPN.
Транзисторы Q2, Q3 и Q4 являются переключающими транзисторами и управляют подачей питания на обмотки якоря. Как было сказано выше, обмотки якоря соединены звездой. Обмотки последовательно включаются с интервалом вращения 120°, чтобы обеспечить вращающийся ток якоря. Транзистор Q1 является транзистором управления током возбуждения и управляет величиной тока, протекающего через обмотки возбуждения в ответ на управляющий потенциал, приложенный к его базе. Кроме того, управляя потенциалом, подаваемым на базу транзистора Q1, катушка возбуждения F2 может быть фактически соединена шунтом с обмотками якоря, так что, например, обеспечивается работа двигателя со смешанной обмоткой.
Как было сказано выше, обмотки якоря соединены звездой. Обмотки последовательно включаются с интервалом вращения 120°, чтобы обеспечить вращающийся ток якоря. Транзистор Q1 является транзистором управления током возбуждения и управляет величиной тока, протекающего через обмотки возбуждения в ответ на управляющий потенциал, приложенный к его базе. Кроме того, управляя потенциалом, подаваемым на базу транзистора Q1, катушка возбуждения F2 может быть фактически соединена шунтом с обмотками якоря, так что, например, обеспечивается работа двигателя со смешанной обмоткой.
Во время работы всякий раз, когда на один из фототранзисторов подается питание, связанный с ним переключающий транзистор включается, вызывая протекание тока через одну из обмоток якоря. Ток также протекает через одну или обе обмотки возбуждения (в зависимости от смещения управляющего транзистора) к отрицательной клемме питания. Отверстия в элементе отсекания света расположены так, что обмотки якоря запитываются последовательно, так что генерируется вращающийся ток якоря; например, каждая обмотка якоря находится под напряжением приблизительно на 120° для трехфазных обмоток, показанных на фиг. 9. Пока ток обмотки якоря вращается, его вращение не влияет на обмотки возбуждения, поэтому поток, создаваемый этими обмотками, остается постоянным. Стационарное поле индуцирует поток в полюсах ротора описанным выше образом. И поток полюса ротора взаимодействует с током якоря, вызывая действие двигателя.
9. Пока ток обмотки якоря вращается, его вращение не влияет на обмотки возбуждения, поэтому поток, создаваемый этими обмотками, остается постоянным. Стационарное поле индуцирует поток в полюсах ротора описанным выше образом. И поток полюса ротора взаимодействует с током якоря, вызывая действие двигателя.
Из предшествующего описания схемы, показанной на фиг. 9 видно, что, за исключением обеспечения управления обмоткой возбуждения, схема аналогична и работает аналогично многим схемам управления бесщеточными двигателями постоянного тока с электронной коммутацией предшествующего уровня техники. То есть схема (за исключением обмотки возбуждения) может быть использована для управления протеканием токов якоря в известном бесщеточном двигателе постоянного тока, в котором используется ротор с постоянными магнитами. Следовательно, следует понимать, что многие схемы управления бесщеточными двигателями постоянного тока предшествующего уровня техники могут использоваться в этом изобретении вместо схемы, показанной на фиг.