Электропривод асинхронный: АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД ОБЩЕПРОМЫШЛЕННОГО НАЗНАЧЕНИЯ С ПРЯМЫМ ЦИФРОВЫМ УПРАВЛЕНИЕМ И РАЗВИТЫМИ ИНТЕЛЛЕКТУАЛЬНЫМИ СВОЙСТВАМИ
alexxlab | 30.07.1992 | 0 | Разное
АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД ОБЩЕПРОМЫШЛЕННОГО НАЗНАЧЕНИЯ С ПРЯМЫМ ЦИФРОВЫМ УПРАВЛЕНИЕМ И РАЗВИТЫМИ ИНТЕЛЛЕКТУАЛЬНЫМИ СВОЙСТВАМИ
УДК:621.3.072.6
АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД ОБЩЕПРОМЫШЛЕННОГО НАЗНАЧЕНИЯ С ПРЯМЫМ ЦИФРОВЫМ УПРАВЛЕНИЕМ И РАЗВИТЫМИ ИНТЕЛЛЕКТУАЛЬНЫМИ СВОЙСТВАМИ
А.Б. Виноградов, В.Л. Чистосердов, А.Н. Сибирцев, Д.А. Монов
В последние годы существенно вырос потребительский спрос
на частотно-регулируемый электропривод общепромышленного назначения. К нему
обычно не предъявляется повышенных статических и динамических требований,
диапазон регулирования скорости не превышает 50:1. На первый план выходят
показатели надежности, экономичности, удобство в эксплуатации, объем дополнительных функциональных возможностей, предоставляемых
потребителю наряду с основным режимом работы привода – режимом регулирования
частоты вращения. В настоящее время образовался серьезный дефицит отечественных
разработок в области частотно-регулируемого электропривода конкурентоспособного
на мировом рынке уровня. Это привело к тому, что значительная доля потребительского
спроса на нашем внутреннем рынке удовлетворяется за счет электроприводов
импортного производства. Небольшая доля общего спроса приходится на
электроприводы отечественного производства, собираемые по “отверточной”
технологии с закрытым от производителя программным обеспечением. Стоимость
таких приводов, как правило, мало отличается от стоимости их импортных
аналогов, перспективы их совершенствования и удешевления невысоки.
Это привело к тому, что значительная доля потребительского
спроса на нашем внутреннем рынке удовлетворяется за счет электроприводов
импортного производства. Небольшая доля общего спроса приходится на
электроприводы отечественного производства, собираемые по “отверточной”
технологии с закрытым от производителя программным обеспечением. Стоимость
таких приводов, как правило, мало отличается от стоимости их импортных
аналогов, перспективы их совершенствования и удешевления невысоки.
Асинхронный электропривод с преобразователем частоты
мощностью 5.5-55 кВт, разработанный в научно-исследовательской лаборатории
“Вектор” кафедры электропривода Ивановского государственного
энергетического университета в целом не уступает своим зарубежным аналогам, а
по ряду технических характеристик и функциональных возможностей существенно их
превосходит. Его отличительными особенностями являются: повышенный
коэффициент использования источника питания за счет заложенного в нем принципа
пространственно-векторного формирования выходного напряжения, удобный и
понятный интерфейс, адаптированный под русскоязычного пользователя, наличие
функций самонастройки на параметры объекта регулирования, высокая информативность,
простота в эксплуатации, стоимость, как минимум в 1.
Область применения электропривода – механизмы вентиляторов, насосов, подъемно-транспортных средств, приводы главного движения и вспомогательных механизмов металлорежущих и деревообрабатывающих станков и других общепромышленных механизмов с диапазоном регулирования скорости до 50:1.
Преобразователь частоты включает трехфазный неуправляемый выпрямитель, трехфазный мостовой IGBT- инвертор с модулем торможения, микропроцессорную систему управления.
Среди технических характеристик и функциональных возможностей электропривода, более подробно изложенных в [1], отметим следующее:
Частота выходного напряжения регулируется в диапазоне от 0 до 400 Гц, что позволяет использовать преобразователь частоты не только с двигателем основного исполнения (380 В, 50 Гц), но и для управления высокоскоростными электрошпинделями станков.
В основу построения
базовой структуры системы управления положен принцип пространственно-векторного
формирования алгоритма управления [2,3] и принцип векторной ориентации
переменных друг относительно друга в установившихся режимах работы
электропривода. Первый обеспечивает улучшенный гармонический состав выходного
напряжения преобразователя и повышенные энергетические характеристики
электропривода; второй – хорошие регулировочные характеристики привода за счет
раздельного управления электромагнитным моментом и потокосцеплением [4].
Первый обеспечивает улучшенный гармонический состав выходного
напряжения преобразователя и повышенные энергетические характеристики
электропривода; второй – хорошие регулировочные характеристики привода за счет
раздельного управления электромагнитным моментом и потокосцеплением [4].
Расчеты и экспериментальные исследования, проведенные в рамках
госбюджетных и хоздоговорных НИР (отчет о НИР/ ИГЭУ “Интеллектуальный
асинхронный электропривод нового поколения с прямым цифровым векторным
управлением” № гос. рег.
01990001575, инв №
02.99.0003169, Иваново,1999, 79 стр.) показали, что в электроприводах
рассматриваемого класса в диапазоне регулирования частоты вращения 10:1
удовлетворительные механические характеристики обеспечиваются с помощью ориентации
по вектору напряжения статора, а в диапазоне 50:1 – с помощью
ориентации по вектору ЭДС статора. Характеристики электропривода наиболее
чувствительны к точности ориентации на малых частотах вращения, где частота
вращения соизмерима с номинальным скольжением. Следовательно, математическая
модель асинхронного двигателя (АД), положенная в основу построения системы
управления, должна быть прежде всего ориентирована на
точность вычислений в области малых частот, что позволяет ее существенно
упростить без значительного ущерба для характеристик электропривода, снизив тем
самым объем вычислительной работы. В области малых частот справедливы следующие
соотношения между параметрами схемы замещения АД [2]:
Следовательно, математическая
модель асинхронного двигателя (АД), положенная в основу построения системы
управления, должна быть прежде всего ориентирована на
точность вычислений в области малых частот, что позволяет ее существенно
упростить без значительного ущерба для характеристик электропривода, снизив тем
самым объем вычислительной работы. В области малых частот справедливы следующие
соотношения между параметрами схемы замещения АД [2]:
.
Это позволяет пренебречь индуктивностями рассеяния статора и ротора, присутствующими в традиционных математических моделях АД, в частности, перейти от традиционной Т- образной схемы замещения фазы двигателя к упрощенной Т- образной схеме замещения.
Применение упрощенной
модели для вычисления переменных электропривода на средних и больших частотах вращения
приводит к рассогласованию между заданным и реальным значениями частоты
вращения. Однако, в рабочих режимах электропривода это
рассогласование не превышает 2-3% от частоты вращения, что вполне допустимо для
приводов рассматриваемого класса.
Функциональная схема электропривода изображена на рис.1. Блок ввода и предварительной обработки сигналов (БВПО) (рис.2) включает в себя переключатель режима работы, фильтр входного сигнала, технологический регулятор и задатчик интенсивности. Переключатель режима устанавливает один из трех режимов работы БВПО. При среднем положении переключателя режимов на выход БВПО поступает сигнал задания скорости электропривода с аналогового входа, при верхнем положении – сигнал с выхода технологического регулятора, при нижнем положении – цифровое задание скорости. При верхнем положении переключателя аналоговый вход БПВО используется для ввода в систему управления сигнала с датчика обратной связи по технологической переменной.
Рис.1. Функциональная схема системы управления электроприводом
Рис.2. Функциональная схема блока ввода и предварительной обработки сигналов
Фильтр
входного сигнала, выполненный в
виде апериодического звена 1-го порядка с постоянной времени , осуществляет низкочастотную фильтрацию помех в сигнале, поступающем
на аналоговый вход системы управления.
Технологический регулятор реализован в виде пропорционально-интегрально-дифференцирующего звена, дополнительно снабженного элементами ограничения и «зона нечувствительности».
Задатчик интенсивности формирует динамические характеристики электропривода по каналу управления, задавая время разгона и время торможения .
Наблюдатель осуществляет вычисление всех переменных необходимых для реализации алгоритма управления электроприводом в соответствии со следующей системой уравнений:
(1)
где – базовое значение напряжения в звене постоянного напряжения
ПЧ, равное напряжению в звене, при котором реальное выходное напряжение
преобразователя совпадает со своим заданным значением; – угловые положения векторов напряжения и ЭДС относительно
фазы статора; – проекции тока статора в системе координат , ориентированной по вектору напряжения статора; – проекции тока статора в системе координат , ориентированной по вектору ЭДС.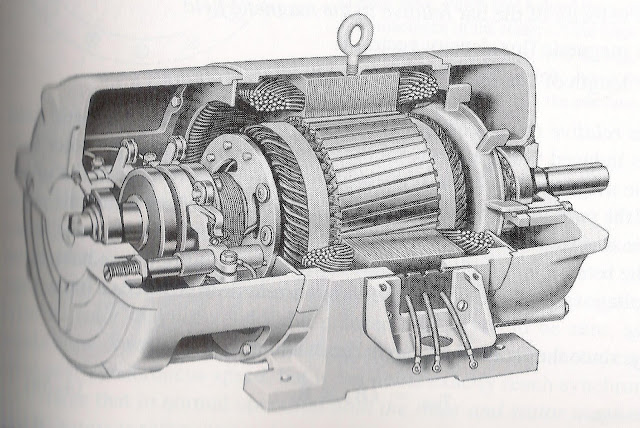
Для упрощенной схемы замещения двигателя токи ротора и намагничивания определяются соотношениями
. (2)
Формирователь частоты (рис.3) осуществляет вычисление заданного значения частоты напряжения статора . Он включает в себя блок компенсации скольжения, блок частотно-токового ограничения, блок коррекции и ограничитель выходного сигнала. Блок компенсации скольжения формирует на своем выходе промежуточный сигнал задания по частоте , учитывающий наличие скольжения
где – задание по электрической частоте вращения ротора.
Необходимость изменения структуры блока компенсации скольжения на малых частотах связана с ограниченным частотным диапазоном ориентации по ЭДС.
Рис. 3. Функциональная
схема формирователя частоты
3. Функциональная
схема формирователя частоты
Блок частотно-токового ограничения осуществляет формирование электромеханической характеристики электропривода в области больших (превышающих номинальный) токов нагрузки. Блок работает в соответствии со следующими уравнениями:
где – модуль и знак сигнала частотно-токового ограничения ; – уставка срабатывания частотно-токового ограничения; – безразмерный коэффициент, определяющий крутизну наклона электромеханической характеристики в области частотно-токового ограничения.
Блок коррекции,
выполненный в виде апериодического звена первого порядка с постоянной времени 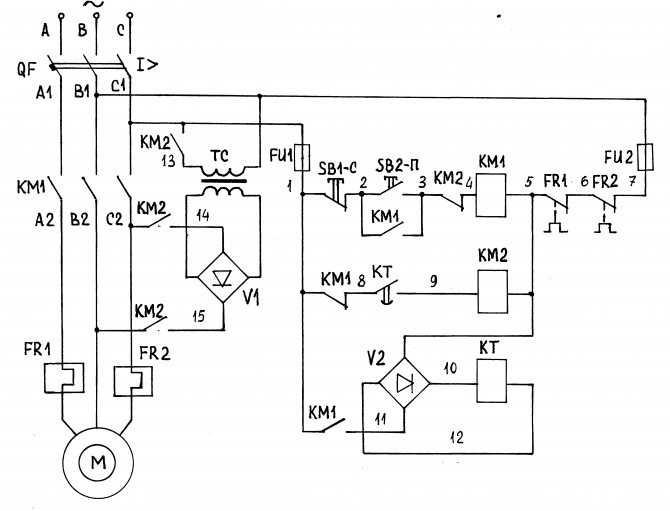
Формирователь напряжения (рис.4) включает в себя формирователь закона управления, корректор режима малых частот, регулятор реактивного тока, блок токовой отсечки, блок гармонической коррекции, блок динамической коррекции. Входными сигналами формирователя напряжения являются задание по частоте , ток статора и ток цепи намагничивания .
Формирователь закона управления вычисляет зависимости заданных значений ЭДС и тока намагничивания от частоты на основе информации о номинальном токе намагничивания , определяемом на этапе автонастройки, и относительных значениях тока намагничивания , задаваемых с пульта управления. При определении и для текущего значения частоты используется линейная аппроксимация зависимостей между крайними точками частотного отрезка, которому принадлежит текущее значение частоты. Работа формирователя строится по следующему алгоритму:
1)
Определяется
отрезок частотного диапазона, которому принадлежит текущее значение частоты .
2) Определяется текущее значение относительного тока намагничивания
где – относительные значения тока намагничивания в крайних точках отрезка частоты.
3) Определяются текущие значения задания по току намагничивания и ЭДС:
где – номинальные значения напряжения и частоты двигателя.
Рис. 4. Функциональная схема формирователя напряжения
Корректор режима малых частот обеспечивает нормальное функционирование электропривода вплоть до полного его
останова. Для этого на определенном уровне частоты , при котором точность вычисления становится недопустимо
низкой, производится отключение регулятора реактивного тока. В дополнение к
этому в прямой канал формирования напряжения вводится добавка в виде , обеспечивающая наличие необходимого уровня напряжения и
тока статора при нулевой частоте вращения электропривода. Относительно
небольшая величина этой добавки позволяет сделать ее включенной постоянно. Придействие этой добавки наряду с другими
малыми невязками в формировании закона управления компенсируются регулятором
реактивного тока.
Относительно
небольшая величина этой добавки позволяет сделать ее включенной постоянно. Придействие этой добавки наряду с другими
малыми невязками в формировании закона управления компенсируются регулятором
реактивного тока.
Регулятор реактивного тока обеспечивает поддержание тока намагничивания на уровне, задаваемом формирователем закона управления. Чтобы устранить статическую ошибку регулирования тока намагничивания регулятор выполнен интегральным с постоянной времени и ограничением выходного сигнала .
Блок токовой отсечки реализует второй
уровень ограничения тока статора, осуществляемый дополнительным воздействием на
канал формирования напряжения. Блок работает следующим образом. Если ток
статора не превышает уровень уставки токовой отсечки , то блок токовой отсечки передает входной сигнал задания по
напряжению на свой выход без
каких-либо изменений. В противном случае, на дополнительный вход суммирующего
элемента блока через корректирующий фильтр токовой отсечки подается с отрицательным
знаком его входной сигнал задания по напряжению. В результате
передаточная функция блока токовой отсечки принимает вид реального
дифференцирующего звена с постоянной времени . Выходной сигнал начинает уменьшаться
по экспоненциальному закону от значения до нуля. Если
при этом ток статора уменьшается ниже уровня уставки
токовой отсечки ,
то блок начинает работать в режиме переключений, обеспечивая поддержание
среднего значения тока статора на уровне уставки. Возвращение системы управления из режима токовой отсечки в
нормальный режим работы также происходит с постоянной времени фильтра токовой
отсечки , что исключает нежелательные резкие скачки в напряжении
задания.
В результате
передаточная функция блока токовой отсечки принимает вид реального
дифференцирующего звена с постоянной времени . Выходной сигнал начинает уменьшаться
по экспоненциальному закону от значения до нуля. Если
при этом ток статора уменьшается ниже уровня уставки
токовой отсечки ,
то блок начинает работать в режиме переключений, обеспечивая поддержание
среднего значения тока статора на уровне уставки. Возвращение системы управления из режима токовой отсечки в
нормальный режим работы также происходит с постоянной времени фильтра токовой
отсечки , что исключает нежелательные резкие скачки в напряжении
задания.
Блок
гармонической коррекции осуществляет стыковку участков синхронного алгоритма модуляции по амплитуде
основной гармоники выходного напряжения преобразователя. Сколь нибудь заметное воздействие этого блока на канал
формирования напряжения проявляется только на больших частотах работы
электропривода . При коэффициент
гармонической коррекции . Всего алгоритм модуляции выходного напряжения содержит 32
участка, из которых один – асинхронный. Коэффициенты коррекции определяются на
границах синхронных участков. Внутри каждого участка их расчет осуществляется
на основе линейной аппроксимации коэффициентов на границах.
При коэффициент
гармонической коррекции . Всего алгоритм модуляции выходного напряжения содержит 32
участка, из которых один – асинхронный. Коэффициенты коррекции определяются на
границах синхронных участков. Внутри каждого участка их расчет осуществляется
на основе линейной аппроксимации коэффициентов на границах.
Блок динамической коррекции обеспечивает формирование желаемого запаса устойчивости электропривода во всем диапазоне регулирования частоты. Сигналы задания по частоте с выхода формирователя частоты и по амплитуде напряжения статора с выхода формирователя напряжения подаются на вход модулятора, который осуществляет формирование импульсов управления шестью транзисторными ключами инвертора напряжения на основе принципов пространственно-векторной модуляции.
Характерной особенностью асинхронных
электроприводов нового поколения, к которым относится представляемая
разработка, является наличие в их арсенале ряда дополнительных
«интеллектуальных» режимов работы, существенно расширяющих функциональные
возможности привода. К ним будем относить:
К ним будем относить:
- самотестирование, при котором электропривод сам проверяет исправность всех своих элементов, выявляет, локализует и диагностирует возможные неисправности;
- автоматическая настройка системы управления на параметры силового канала электропривода;
- режим повышенного энергосбережения;
- режим “самоподхвата” на заранее неизвестной частоте вращения;
- режим автоматического перезапуска и другие;
В
режиме автоматической настройки электропривод на основе предварительно введенной с пульта управления информации
о номинальном напряжении двигателя , номинальном токе статора , номинальной частоте , номинальном скольжении , номинальном коэффициенте мощности , числе пар полюсов в автоматическом режиме работы определяет
активное сопротивление статорной цепи , индуктивность намагничивания , активное сопротивление ротора и рассчитывает все
параметры системы управления.
Определение активного сопротивления статорной цепи осуществляется в режиме «неподвижного» вектора, соответствующего формированию на обмотках статора постоянного эквивалентного напряжения. Операции выполняются в следующей последовательности:
1) Определяется уровень постоянного напряжения, соответствующий номинальному току двигателя, в режиме пошагового инкрементирования задания по выходному напряжению и контроля амплитуды тока на каждом шаге.
2) Производится серия замеров тока статора на установленном уровне постоянного напряжения.
3) Вычисляется активное сопротивление статорной цепи по формуле:
где , – число замеров тока статора.
Определение индуктивности намагничивания осуществляется в режиме холостого хода на частоте, близкой к номинальной
частоте двигателя. Напряжение статора формируется в соответствии со следующим
законом:
Напряжение статора формируется в соответствии со следующим
законом:
Система управления разомкнута за исключением цепей, осуществляющих динамическую коррекцию. Электропривод разгоняется до заданной частоты и выполняется серия из замеров тока статора. Индуктивность намагничивания рассчитывается по формуле:
где – ЭДС и ток намагничивания на -м интервале измерения, рассчитываемые в соответствии с (1,2).
Активное сопротивление роторной цепи вычисляется на основании упрощенной схемы замещения АД по формуле
где – расчетные значения токов ротора и намагничивания для
номинального режима работы двигателя; – ЭДС для номинального режима работы, вычисляемая
по (1) с учетом следующих соотношений: ; .
Режим “самоподхвата” на заранее неизвестной частоте вращения позволяет осуществлять подключение к преобразователю двигателей с вращающимся валом, обеспечивая при этом минимизацию переходных процессов. Эффект достигается за счет предварительного определения частоты вращения вала двигателя и выдачи на его зажимы напряжения с расчетным значением частоты. Особенно актуален данный режим для механизмов с большими моментами инерции, так как позволяет не тратить время и энергию на останов и последующий разгон электроприводов с нулевой частоты.
Определение
частоты вращения вала двигателя, который был на какое-то время отключен от
преобразователя, осуществляется в поисковом режиме работы. Основными параметрами
режима “самоподхвата” являются бит
направления поиска, максимальная и минимальная граничные частоты
поиска, постоянная времени поиска , задающая его темп и временные выдержки на затухание
переходных процессов. Поиск осуществляется по следующему алгоритму:
Поиск осуществляется по следующему алгоритму:
1) После отключения двигателя от преобразователя выдерживается временная пауза на затухание электромагнитных переходных процессов.
2) Двигатель включается на пониженное напряжение с частотой в заданном направлении поиска и после малой выдержки времени на затухание переходного процесса осуществляется снижение частоты напряжения с темпом, задаваемым , в направлении .
3) В режиме поиска осуществляется анализ тока статора. Критерием определения искомой частоты вращения вала является явно выраженный (глобальный) минимум тока статора, проявляющийся на электромеханической характеристике привода в режиме идеального холостого хода, то есть когда частота питающего напряжения равна частоте вращения вала.
4)
Если в
заданном направлении искомая частота не обнаружена, то поиск производится в
противоположном направлении в той же последовательности (может быть
заблокирован).
5) Если искомая частота не обнаружена в обоих направлениях поиска (глобальный минимум тока отсутствует), то пуск электропривода осуществляется с нулевой частоты.
В режиме повышенного энергосбережения электропривод в результате выполнения поисковой процедуры самостоятельно выбирает такое соотношение параметров сигнала управления, что при текущих параметрах нагрузки обеспечивается минимальное потребление электрической энергии. Критерием достижения данного режима принимается минимум выходной мощности преобразователя, усредненной на определенном расчетном интервале (периоде поиска)
,
где – число выборок переменных на периоде поиска.
Высокие показатели энергосбережения обеспечивает также применение критерия минимизации тока статора .
Для
того чтобы поисковая процедура не приводила к неустойчивой работе электропривода
и выходу переменных за пределы допустимых значений, допустимая область поиска
ограничивается своей верхней и нижней границами, которые исчисляются в процентном
отношении от базового напряжения, определяемого по базовому (жестко заданному)
закону частотного управления. Поисковая процедура организуется по следующему алгоритму:
Поисковая процедура организуется по следующему алгоритму:
1) Выполняется пробный шаг изменения амплитуды напряжения при текущем значении частоты.
2) После выдержки времени на затухание переходной составляющей поискового процесса осуществляется измерение выходной мощности преобразователя.
3) В результате анализа выходной мощности по отношению к предыдущим замерам определяется направление дальнейшего поиска.
Основными
параметрами поискового алгоритма являются шаг поиска, границы области поиска,
нижний предел частоты, до которой осуществляется поиск, период поиска . Наибольший эффект от режима повышенного энергосбережения
достигается при работе электропривода в режимах малых нагрузок. При
загруженности электропривода свыше 60% эффект незначителен. Вследствие
некоторой инерционности поискового алгоритма режим повышенного
энергосбережения рекомендован для электроприводов с достаточно
плавным изменением нагрузки в рабочих режимах.
Представленный электропривод прошел производственные испытания и внедрен на предприятиях различных сфер народного хозяйства. В частности, эффект от его внедрения на насосных станциях подкачки воды в жилые дома г. Иваново составил до 70% экономии электроэнергии и до 40% экономии воды. Освоено промышленное серийное производство электропривода.
Список литературы
1. Виноградов А. Б., Чистосердов В. Л., Сибирцев А. Н. Частотно-регулируемый электропривод переменного тока нового поколения // Привод и управление. – 2000. – №0.- c. 21-24.
2. Архангельский Н.Л., Курнышев Б.С., Виноградов А.Б. Новые алгоритмы в управлении асинхронным электроприводом // Электротехника. – 1991.- №10.- с. 9-13.
3. Архангельский Н.Л., Чистосердов В.Л. Формирование алгоритмов управления в частотно-управляемом электроприводе // Электротехника. – 1994.- №3.- с. 48-52.
4.
Система
векторного управления асинхронным электроприводом с идентификатором состояния/
Архангельский Н. Л., Курнышев Б.С., Виноградов А.Б.,
Лебедев С.К. // Электричество. – 1991. – №11. – с. 47-51.
Л., Курнышев Б.С., Виноградов А.Б.,
Лебедев С.К. // Электричество. – 1991. – №11. – с. 47-51.
Асинхронный электропривод
Асинхронный электропривод
Односкоростные асинхронные двигатели с короткозамкнутым ротором применяют обычно в крановых механизмах, не требующих регулирования скорости, например для привода монтажных лебедок кранов КБ и АБКС-5. В приводах механизмов, в которых нужно регулировать скорости, односкоростные асинхронные двигатели используют в сочетании с системами или устройствами регулирования скорости. Например, для получения малой скорости спуска груза на кране АБКС-5 на грузовой лебедке установлена редукционная муфта; на кране КБк-250 скорость механизма поворота регулируется электромагнитной муфтой скольжения.
Для привода крановых механизмов, в которых допускается ступенчатое изменение скорости, применяют двухскоростные асинхронные двигатели с короткозамкнутым ротором. На статоре у этих двигателей обычно размещаются две обмотки с разным числом полюсов. Поочередное включение каждой из статорных обмоток обеспечивает работу двигателя с различной скоростью вращения. На рис. 90, а, б показаны электрическая схема и механические характеристики привода грузовой тележки с двухскоростным электродвигателем МТКМ 311—6/16.
Поочередное включение каждой из статорных обмоток обеспечивает работу двигателя с различной скоростью вращения. На рис. 90, а, б показаны электрическая схема и механические характеристики привода грузовой тележки с двухскоростным электродвигателем МТКМ 311—6/16.
В первом положении Вперед замыкаются контакты В1-1 и В1-3 командоконтроллера. Контакт В1-1 включает контактор К1. Контакт В1-3 включает реле времени РВ и через замкнувшийся блок-контакт К1 включает контактор малой скорости КЗ. Блок-контакт КЗ и контакт реле РВ в цепи катушки К4 размыкаются. К питающей сети оказывается подключенной статорная обмотка с 16 полюсами, двигатель работает с малой скоростью на характеристике.
Рекламные предложения на основе ваших интересов:
Дополнительные материалы по теме:
Ряс. 1. Электропривод грузовой тележки с двухскоростным асинхронным электродвигателем:
а — принципиальная схема, б — механические характеристики
Во втором положении Вперед размыкается контакт В1-3 и замыкается контакт В1-4 командоконтроллера. Контактор КЗ и реле РВ отключаются. Блок-контакт КЗ замыкает участок цепи катушки К4. По истечении времени выдержки реле РВ его контакт замкнется и включит катушку К4. Контактор К4 присоединит к питающей сети вторую обмотку статора с 6 полюсами (обмотка с полюсами отключена контактором КЗ). Двигатель начинает работать с большей скоростью на характеристике. При переводе рукоятки командоконтроллера в первое и второе положения Назад схема работает аналогично, но вместо контактора К1 будет включен контактор К2.
Контактор КЗ и реле РВ отключаются. Блок-контакт КЗ замыкает участок цепи катушки К4. По истечении времени выдержки реле РВ его контакт замкнется и включит катушку К4. Контактор К4 присоединит к питающей сети вторую обмотку статора с 6 полюсами (обмотка с полюсами отключена контактором КЗ). Двигатель начинает работать с большей скоростью на характеристике. При переводе рукоятки командоконтроллера в первое и второе положения Назад схема работает аналогично, но вместо контактора К1 будет включен контактор К2.
—
Асинхронный электропривод шахтных подъемных машин, являясь самой простой и надежной системой привода, получил наибольшее распространение в угольной промышленности. Однако механические характеристики асинхронного двигателя не позволяют простыми средствами получить устойчивые малые скорости, что осложняет проблему автоматизации подъемных установок с этим видом привода.
Для привода подъемных установок применяют двигатели переменного тока с фазным ротором. Момент и скорость, развиваемая двигателем, регулируются изменением величины сопротивления включенного в цепь ротора. Увеличение сопротивления при неизмененной нагрузке приводит к снижению скорости, а уменьшение — к ее увеличению.
Увеличение сопротивления при неизмененной нагрузке приводит к снижению скорости, а уменьшение — к ее увеличению.
После подключения статора двигателя к сети статорным контактором или высоковольтным реверсором разгон двигателя осуществляется последовательным уменьшением сопротивления в роторной Цепи с помощью контакторов ускорения, которые своими силовыми контактами закорачивают ступени сопротивлений. Переключение контакторов ускорения производится таким образом, чтобы развиваемый двигателем момент колебался около среднего заданного значения, определяющего среднее значение заданного ускорения в процессе разгона.
При ручном управлении в начале пуска машинист устанавливает рукоятку управления в первое положение. При этом включается реверсирующий контактор (при низковольтном двигателе) или высоковольтный реверсор (при высоковольтном двигателе). В цепь ротора в этом случае полностью введено сопротивление, величина которого выбирается такой, чтобы двигатель при неподвижном роторе развивал момент, равный 30—40% статического момента системы.
Таким образом, при установке рукоятки управления в первое положение подъемная машина в движение не приводится, происходит лишь натяжение кинематических узлов установки. При установке рукоятки управления во второе положение включается первый контактор ускорения и своими контактами закорачивает первую ступень сопротивления. Величина оставшегося сопротивления такова, что двигатель развивает момент, равный 80—90% статического момента нагрузки, и подъемная машина также не приходит в движение, осуществляя дальнейшее натяжение кинематических узлов установки. Первые две ступени сопротивлений и соответствующие положения рукоятки управления называются предварительными. При нагрузке меньше номинальной двигатель начинает вращаться при установке рукоятки управления во второе положение.
При установке рукоятки управления в третье положение соответствующим контактором закорачивается третья ступень сопротивления в цепи ротора, и двигатель начинает вращаться, развивая момент, равный пусковому моменту, который больше статического в 1,8—2,0 раза. Под действием избыточного момента двигатель увеличивает скорость. При увеличении скорости крутящий момент и ток двигателя уменьшаются. Для обеспечения заданного режима разгона необходимо своевременно переводить рукоятку управления в следующее положение, закорачивая тем самым следующие ступени сопротивления таким образом, чтобы момент двигателя не снижался ниже величины момента переключения (величина момента переключения равна примерно 120% среднего статического момента нагрузки).
Следовательно, момент, развиваемый двигателем в процессе пуска, изменяется ступенчато. При полностью закороченном сопротивлении в цепи ротора двигатель достигает полной скорости, а момент, развиваемый двигателем, становится равным статическому моменту нагрузки. На этом пуск подъемной машины заканчивается, и двигатель начинает движение с равномерной скоростью. При спуске груза применяется генераторное торможение. За счет энергии спускающегося груза двигатель работает генератором, отдавая энергию в сеть и развивая тормозной момент. В этом режиме двигатель должен работать с закороченным ротором. Спуск груза производится при
Для осуществления генераторного торможения необходимо от-тормозить машину и переместить рукоятку управления в положение, соответствующее направлению спуска груза. Машина под действием груза приходит во вращение. При передвижении рукоятки управления необходимо следить, чтобы ток статора не превышал величины, обычной при работе двигателя, и чтобы при достижении номинальной скорости ротор уже был замкнут накоротко.
В некоторых случаях при необходимости экстренного торможения может быть применено торможение противовключением. В этом режиме направление вращения магнитного поля статора противоположно направлению вращения ротора двигателя, за счет чего и создается тормозной момент. Торможение противовключением осуществляется установкой рукоятки управления в пополнение, соответствующее противоположному направлению вращения двигателя. Переход в режим противовключения необходимо производить только при включенном в цепь ротора сопротивлении.
Нормальное замедление подъемной машины осуществляют обычно отключением двигателя от сети и подтормаживанием его рабочим тормозом. На ряде установок используют режим свободного выбега, когда двигатель отключается от сети и замедляется под действием масс привода.
На многих установках для замедления привода применяют динамическое торможение. Двигатель отключается от сети, его ротор вращается внешней силой, а в статор подается постоянный ток, создающий неподвижное магнитное поле и наводящий во вращающемся роторе (замкнутом накоротко или на сопротивление) переменный ток, взаимодействующий с полем статора и создающий тормозной момент. Величина тормозного момента зависит от скорости вращения и величины сопротивления в цепи ротора. Тормозной момент можно регулировать, изменяя величину постоянного тока, подаваемого в обмотки статора, и величину сопротивления в цепи ротора двигателя.
Динамическое торможение используется также и при спуске груза.
Получить устойчивые малые скорости при асинхронном приводе подъемной машины трудно. При ручном управлении малую скорость получают введением в цепь ротора сопротивления при одновременном подтормаживании механическим тормозом. При двухдвигательном приводе подъемной машины получение малой скорости возможно благодаря работе одного двигателя в двигательном режиме с сопротивлением в цепи ротора и одновременной работе второго двигателя в режиме динамического торможения.
При автоматизации подъемных установок для получения малой скорости используют механическое подтормаживание, описанный выше двухдвигательный привод, а также питание двигателя током низкой частоты от специального преобразователя.
В чем разница между асинхронными и синхронными двигателями?
Загрузите эту статью в формате .PDF
Растущее значение энергоэффективности побудило производителей электродвигателей продвигать различные схемы, улучшающие характеристики двигателя. К сожалению, терминология, связанная с моторными технологиями, может сбивать с толку, отчасти потому, что несколько терминов иногда могут использоваться взаимозаменяемо для обозначения одной и той же базовой конфигурации мотора. Среди классических примеров этого явления — асинхронные и асинхронные двигатели.
Все асинхронные двигатели являются асинхронными. Асинхронный характер работы асинхронного двигателя возникает из-за скольжения между скоростью вращения поля статора и несколько более низкой скоростью вращения ротора. Более конкретное объяснение того, как возникает это скольжение, касается деталей внутреннего устройства двигателя.
Большинство современных асинхронных двигателей содержат вращающийся элемент (ротор), называемый беличьей клеткой. Цилиндрическая беличья клетка состоит из тяжелых медных, алюминиевых или латунных стержней, вставленных в канавки и соединенных с обоих концов проводящими кольцами, которые электрически закорачивают стержни друг с другом. Сплошной сердечник ротора состоит из пакетов пластин из электротехнической стали. В роторе меньше пазов, чем в статоре. Количество пазов ротора также должно быть нецелым кратным пазам статора, чтобы предотвратить магнитную блокировку зубьев ротора и статора при запуске двигателя.
Также можно найти асинхронные двигатели, роторы которых состоят из обмоток, а не из беличьей клетки. Суть этой конфигурации с фазным ротором состоит в том, чтобы обеспечить средства снижения тока ротора, когда двигатель впервые начинает вращаться. Обычно это достигается путем последовательного соединения каждой обмотки ротора с резистором. Обмотки получают ток через какое-то контактное кольцо. Как только ротор достигает конечной скорости, полюса ротора переключаются на короткое замыкание, таким образом, электрически он становится таким же, как ротор с короткозамкнутым ротором.
Неподвижная часть обмоток двигателя называется якорем или статором. Обмотки статора подключаются к сети переменного тока. Приложение напряжения к статору вызывает протекание тока в обмотках статора. Протекание тока индуцирует магнитное поле, которое воздействует на ротор, создавая напряжение и ток в элементах ротора.
Северный полюс статора индуцирует южный полюс ротора. Но полюс статора вращается при изменении амплитуды и полярности переменного напряжения. Индуцированный полюс пытается следовать за вращающимся полюсом статора. Однако закон Фарадея гласит, что электродвижущая сила возникает, когда петля провода перемещается из области с низкой напряженностью магнитного поля в область с высокой напряженностью магнитного поля и наоборот. Если бы ротор точно следовал за движущимся полюсом статора, напряженность магнитного поля не изменилась бы. Таким образом, ротор всегда отстает от вращения поля статора. Поле ротора всегда отстает от поля статора на некоторую величину, поэтому оно вращается со скоростью, несколько меньшей, чем скорость статора. Разница между ними называется скольжением.
Величина скольжения может варьироваться. Это зависит в основном от нагрузки, которую приводит двигатель, но также зависит от сопротивления цепи ротора и силы поля, которое индуцирует поток статора.
Несколько простых уравнений проясняют основные взаимосвязи.
Когда переменный ток изначально подается на статор, ротор неподвижен. Напряжение, индуцируемое в роторе, имеет ту же частоту, что и в статоре. Когда ротор начинает вращаться, частота наведенного в нем напряжения f r , капли. Если f – частота напряжения статора, то скольжение, с, связывает два через f r = с f . Здесь s выражается в виде десятичной дроби.
Когда ротор стоит на месте, ротор и статор эффективно образуют трансформатор. Таким образом, напряжение E , индуцируемое в роторе, определяется уравнением трансформатора0022 м
где N = количество проводников под одним полюсом статора (обычно небольшое для двигателя с короткозамкнутым ротором) и Ñ„ м = максимальный магнитный поток, Webers. Thus, the voltage E r induced while the rotor spins depends on the slip:
E r = 4.44 s f N Ñ„ m = s E
Описание синхронных двигателей Синхронный двигатель имеет специальную конструкцию ротора, которая позволяет ему вращаться с той же скоростью, то есть синхронно, с полем статора. Одним из примеров синхронного двигателя является шаговый двигатель, широко используемый в приложениях, связанных с управлением положением. Однако недавние достижения в области схем управления мощностью привели к созданию конструкций синхронных двигателей, оптимизированных для использования в таких ситуациях с более высокой мощностью, как вентиляторы, воздуходувки и ведущие оси внедорожников.
В основном существует два типа синхронных двигателей:
• С самовозбуждением — Принципы аналогичны асинхронным двигателям, и
• С прямым возбуждением — обычно с постоянными магнитами, но не всегда
Синхронный двигатель с самовозбуждением , также называемый вентильным реактивным двигателем, содержит стальной литой ротор с прорезями или зубьями, получившими название явно выраженных полюсов. Именно выемки позволяют ротору зафиксироваться и работать с той же скоростью, что и вращающееся магнитное поле.
Чтобы переместить ротор из одного положения в другое, схема должна последовательно переключать питание на последовательные обмотки/фазы статора аналогично шаговому двигателю. Синхронный двигатель с прямым возбуждением может называться по-разному. Обычные названия включают ECPM (постоянный магнит с электронной коммутацией), BLDC (бесщеточный двигатель постоянного тока) или просто бесщеточный двигатель с постоянным магнитом. В этой конструкции используется ротор с постоянными магнитами. Магниты могут устанавливаться на поверхности ротора или вставляться в узел ротора (в этом случае двигатель называется двигателем с внутренними постоянными магнитами).
Постоянные магниты являются выступающими полюсами этой конструкции и предотвращают скольжение. Микропроцессор управляет последовательным переключением питания на обмотках статора в нужное время с помощью полупроводниковых переключателей, сводя к минимуму пульсации крутящего момента. Принцип работы всех этих типов синхронных двигателей в основном одинаков. Энергия подается на катушки, намотанные на зубья статора, которые создают значительный магнитный поток, пересекающий воздушный зазор между ротором и статором. Поток течет перпендикулярно воздушному зазору. Если выступающий полюс ротора идеально совмещен с зубцом статора, крутящий момент не возникает. Если зубец ротора находится под некоторым углом к зубу статора, по крайней мере часть потока пересекает зазор под углом, не перпендикулярным поверхностям зубьев. Результатом является крутящий момент на роторе. Таким образом, переключение питания на обмотки статора в нужное время вызывает картину потока, которая приводит к движению по часовой стрелке или против часовой стрелки.
Еще один тип синхронного двигателя называется вентильным реактивным двигателем (SR).
Его ротор состоит из стальных пластин с набором зубьев. Зубцы магнитопроницаемы, а окружающие их участки слабопроницаемы в силу прорезанных в них пазов. Таким образом, ротору не нужны обмотки, редкоземельные материалы или магниты.
В отличие от асинхронных двигателей, в роторе отсутствуют стержни ротора и, следовательно, в роторе не протекает ток, создающий крутящий момент. Отсутствие проводника какой-либо формы на роторе SR означает, что общие потери в роторе значительно ниже, чем в других двигателях с роторами, несущими проводники. Крутящий момент, создаваемый двигателем SR, регулируется путем регулировки величины тока в электромагнитах статора. Затем скорость регулируется путем модуляции крутящего момента (посредством тока обмотки). Этот метод аналогичен тому, как скорость регулируется током якоря в традиционном щеточном двигателе постоянного тока.
Двигатель SR создает крутящий момент, пропорциональный величине тока, подаваемого на его обмотки. Производство крутящего момента не зависит от скорости двигателя. Это отличается от асинхронных двигателей переменного тока, где при высоких скоростях вращения в области ослабления поля ток ротора все больше отстает от вращающегося поля по мере увеличения оборотов двигателя.
Основное различие между синхронным и асинхронным двигателем
Электрические двигатели представляют собой машины, преобразующие электрическую энергию в механическую для выполнения механических операций. Эти двигатели могут быть рассчитаны на работу с переменным током (AC) или постоянным током (DC). Двигатели переменного тока делятся на два типа; Синхронные двигатели и асинхронные двигатели. Оба они имеют некоторое сходство, например, в своей конструкции, но они совершенно разные в работе и своих характеристиках.
Прежде чем перейти к списку различий между синхронным двигателем и асинхронным двигателем, мы собираемся обсудить их основы и принцип их работы. Для ясного объяснения вы можете знать разницу между однофазным и трехфазным источником питания, связанную с работой однофазных и трехфазных двигателей переменного тока.
- Связанная запись: Разница между однофазным и трехфазным асинхронным двигателем
Как мы знаем из нашей предыдущей статьи «Различия между двигателями переменного и постоянного тока», двигатели постоянного тока работают по принципу действия магнитного поля на проводник с током, который испытывает механическую силу. Где статор создает статическое магнитное поле, а ротор, состоящий из нескольких обмоток, несет входной постоянный ток.
В двигателях переменного тока используется идея RMF вращательного магнитного поля. Статор состоит из нескольких обмоток, которые создают переменное магнитное поле при подаче на вход переменного тока. Это магнитное поле вращается вокруг ротора.
Ротор, состоящий из обмоток или проводников с замкнутым контуром, пропускает ток через индукцию или внешний источник тока, генерирующий собственное магнитное поле. Магнитное поле, создаваемое ротором, взаимодействует с вращающимся магнитным полем и начинает вращаться в его направлении.
Относительная разница между полем вращения статора и скоростью вращения ротора называется скольжением. если скольжение двигателя равно нулю или ротор имеет ту же скорость вращения, что и поле вращения статора, двигатель называется синхронным двигателем переменного тока. если двигатель переменного тока имеет скольжение или существует разница между скоростью вращения поля статора и ротора, двигатель называется асинхронным двигателем. Чтобы узнать больше о различных типах двигателей, обратитесь к предыдущим сообщениям о двигателе BLDC (бесщеточный двигатель постоянного тока), шаговых двигателях и серводвигателях.
Похожие сообщения:
- Разница между двигателями переменного и постоянного тока
- Разница между генератором переменного и постоянного тока
Как следует из названия, ротор синхронного двигателя предназначен для вращения с той же скоростью, что и его магнитное поле, вращающееся в статоре, называемое синхронной скоростью .
Статор создает вращающееся магнитное поле при подаче переменного тока. Ротор может быть спроектирован так, чтобы генерировать собственное магнитное поле с помощью внешний источник постоянного тока через токосъемные кольца или постоянный магнит .
Ротор предназначен для создания магнитных полюсов, равных или кратных полюсам статора. Когда статор и ротор находятся под напряжением, магнитное поле ротора блокируется вращательным магнитным полем статора, и он вращается с точной скоростью поля статора.
Из-за инерции синхронный двигатель не сразу запускается на синхронной скорости (вращательное магнитное поле). Поэтому дополнительная обмотка под названием « Демпферная обмотка ” служит для обеспечения пускового момента. Он действует как асинхронный двигатель во время запуска. Таким образом, это говорит о том, что синхронные двигатели не являются самозапускающимися , им нужен дополнительный пусковой механизм.
Это может быть двигатель с независимым или невозбужденным возбуждением, т. е. первый требует отдельного источника постоянного тока, который питает обмотки ротора и создает магнитное поле, а второй описывает синхронный двигатель, ротор которого предназначен для намагничивания вращающимся магнитным полем статора. и вращается вместе с ним.
Ротор синхронного двигателя вращается с синхронной скоростью, которая зависит от частоты сети и полюсов обмоток статора. Следовательно, скорость двигателя не зависит от нагрузки. Чтобы изменить скорость синхронного двигателя, необходимо изменить частоту питания. Это достигается с помощью VFD (частотно-регулируемый привод).
Похожие сообщения:
- Однофазный асинхронный двигатель – конструкция, работа, типы и применение
- Трехфазный асинхронный двигатель – конструкция, работа, типы и применение
Название асинхронного двигателя предполагает, что скорость вращения ротора асинхронна со скоростью вращения магнитного поля статора. Точнее, ротор асинхронного двигателя вращается с относительно меньшей скоростью, чем статор RMF. Это связано с наличием проскальзывания между скоростью вращения его статора и ротора.
Ротор асинхронного двигателя представляет собой либо короткозамкнутый ротор с обмоткой. Ротор с короткозамкнутым ротором состоит из тяжелых медных стержней, соединенных на концах с помощью проводящего кольца, которое электрически замыкает их друг на друга. Ротор витого типа состоит из нескольких обмоток поверх стального многослойного сердечника.
Вращающееся магнитное поле статора вызывает индуцированный ток в роторе. Этот индуцированный ток течет внутри ротора, создавая собственное магнитное поле. Согласно закону Ленца, это поле ротора противодействует причине, которая его создает, и пытается устранить ее, догоняя скорость RMF статора (синхронная скорость). При этом ротор вращается в направлении RMF статора. Поскольку он работает по принципу индукции, поэтому асинхронный двигатель также известен как асинхронный двигатель 9.0054 .
Асинхронный двигатель никогда не может работать на синхронной скорости, он всегда медленнее синхронной скорости и зависит от скольжения двигателя. Причина в том, что индуцированный ток в роторе генерируется из-за разницы между полем статора и ротора. если, в случае, если он работает на синхронной скорости, это означает, что ротор магнитно заблокирован, и между статором и полем ротора нет разницы. Следовательно, не было бы магнитного потока, индуцирующего ток в роторе. Магнитный поток необходим для асинхронного двигателя, поэтому он должен работать на более низкой скорости, чем его синхронная скорость.
Ротор с короткозамкнутым ротором имеет более простую конструкцию и позволяет индуцированному току протекать через медные стержни. В то время как ротор с обмоткой позволяет пользователю изменять ток ротора во время его запуска, как это используется в «Моторном пускателе». Смысл в том, чтобы безопасно запустить двигатель, уменьшив огромный пусковой ток, потребляемый асинхронным двигателем. Обычно это делается путем последовательного включения переменного резистора с обмотками ротора через токосъемные кольца.
Скорость асинхронного двигателя зависит от скольжения двигателя, которое зависит от нагрузки и сопротивления ротора. Другими словами, скорость асинхронного двигателя может изменяться в зависимости от нагрузки или за счет изменения сопротивления ротора.
Связанный пост:
- Разница между трансформатором и асинхронным двигателем
- Разница между генератором переменного тока и генератором
В следующей таблице показаны основные различия между синхронным двигателем и асинхронным (асинхронным) двигателем.
| Синхронный двигатель | Асинхронный двигатель |
| Синхронный двигатель представляет собой тип двигателя переменного тока, который работает с синхронной скоростью. | Асинхронный двигатель — это двигатель переменного тока, который работает на скорости ниже синхронной. |
| Работает по принципу магнитной блокировки между полем ротора и статора. | Работает по принципу электромагнитной индукции между статором и ротором. |
| Скольжения нет, т.е. скольжение синхронного двигателя равно 0. | В асинхронном двигателе имеется скольжение, и оно всегда больше 0. |
| Скорость двигателя зависит от частоты сети и количества полюсов статора. N с = 120 f / P | Скорость двигателя зависит от нагрузки, сопротивления ротора и скольжения, с. она всегда меньше синхронной скорости. N = N с (1-с) Н < Н с |
| Скорость не меняется при изменении нагрузки, подключенной к двигателю. | Скорость меняется в зависимости от нагрузки двигателя. |
| Это не самозапуск и требует дополнительных обмоток для запуска двигателя. | Асинхронные двигатели самозапускающиеся и не требуют дополнительного механизма. |
| Для ротора требуется дополнительный источник тока. | Ротор асинхронного двигателя не требует дополнительного питания. |
| Синхронный двигатель с независимым возбуждением требует дополнительного источника постоянного тока для питания обмотки ротора. | Не требует дополнительного источника. |
| Также необходимы контактные кольца и щетки для подачи постоянного тока на обмотки ротора. | Не требует токосъемных колец, однако в витом типе можно использовать токосъемные кольца для контроля скорости. |
| Скорость двигателя регулируется только путем изменения частоты питания через ЧРП. | Скорость двигателя можно регулировать с помощью переменного сопротивления ротора, а также устройств ЧРП. |
| Подача входного напряжения не влияет на скорость или крутящий момент синхронного двигателя. | Источник входного напряжения может использоваться для изменения крутящего момента и скорости двигателя. |
| Колебания сетевого напряжения не влияют на работу синхронного двигателя. | Колебания сетевого напряжения влияют на его скорость и работу. |
| Первоначальная стоимость выше, чем у асинхронного двигателя. | Асинхронные двигатели дешевле. |
| Это операция сложная. | Это операция проста и удобна для пользователя. |
| If обеспечивает высокую эффективность и точность. | Они не так эффективны, как синхронный двигатель. |
| Может легко работать на очень низкой скорости с помощью ЧРП. | Довольно сложно работать на низкой скорости. |
| Лучше всего работает при низкой скорости, обычно ниже 300 об/мин. | Лучше всего подходит для работы на скорости выше 600 об/мин. |
| Он может работать с отстающим, опережающим или единичным коэффициентом мощности путем регулировки возбуждения. | Асинхронный или асинхронный двигатель всегда работает с отстающим коэффициентом мощности. |
| Он также может одновременно использоваться для коррекции коэффициента мощности, используя его в опережающем коэффициенте мощности. | Его нельзя использовать для коррекции коэффициента мощности, а только для управления механическими нагрузками. |
| Поскольку он работает с постоянной скоростью, внезапные изменения нагрузки вызовут колебания потребляемого тока. | В асинхронном двигателе такого явления нет. |
Вывод этой статьи состоит в том, что синхронные двигатели эффективны, но дороже и используются для приложений со сверхнизкими оборотами, предлагая функцию коррекции коэффициента мощности.