Электропривод асинхронный – Асинхронный электропривод
alexxlab | 22.02.2020 | 0 | Разное
Асинхронный электропривод
Наибольшее применение однофазные асинхронные электродвигатели нашли в быту и малом бизнесе. Их применение необходимо в тех областях, где нет трехфазной электрической сети. Многие компании выпускаются однофазные электродвигатели мощностью до 2 кВт и выше. Применение однофазных двигателей большей мощности ограничено мощностью бытовой сети и проблемами запуска однофазного двигателя. Приемлемое, на сегодняшний день, решение таких проблем возможно…
Устройство асинхронного энергосберегающего двигателя отличается от устройства асинхронного трехфазного двигателя. В конструкцию энергосберегающего двигателя внесены изменения, направленные на улучшение эксплуатационных характеристик для получения максимально высокого КПД. Устройство и внешний вид энергосберегающего двигателя показаны на рисунке. 2.1 Корпус; 2.2 Рым-болт; 2.4 Заземляющее устройство; 2.5 Клеммная коробка; 2.8 Подшипниковый щит; 2.10 Кожух вентилятора; 2.11 Фирменная табличка; 3.1…
Вопрос создания энергосберегающих электродвигателей возник одновременно с изобретением самих электрических машин. На Международной электротехнической выставке 1891 г. во Франкфурте-на-Майне, Чарльз Браун (впоследствии основавший компанию ABB) показал синхронный трехфазный генератор, собственного производства, КПД которого превышал 95%. Асинхронный трехфазный двигатель, представленный Михаилом Доливо-Добровольским, показал КПД 95%. С тех пор показатели КПД трехфазного асинхронного двигателя удалось улучшить всего…
Для обозначения асинхронных энергосберегающих двигателей для частотно регулируемых электроприводов используются условные обозначения, которые состоят из условного обозначения базового двигателя и цифрового кода специального конструктивного исполнения. Цифровой код специального конструктивного исполнения двигателей состоит из четырех цифр. первая цифра – кодировка конструктивного исполнения по способу охлаждения двигателя согласно ГОСТ20459 (МЭК 60034-6). 0 — IC 0141 закрытая машина…
Продолжая тему энергосбережения, необходимо подробнее рассмотреть проблемы широкого внедрения в производство современных энергосберегающих асинхронных двигателей. Основной проблемой широкого внедрения энергосберегающих систем в производство, является высокая стоимость энергосберегающих двигателей. В машиностроении, металлургии, химической, пищевой, стекольной, целлюлозно-бумажной и текстильной промышленности используется огромное число электроприводов на базе двигателей постоянного тока. Простая их замена на асинхронные энергосберегающие…
Как запускать трехфазный асинхронный двигатель от однофазной сети? Самый простой способ запуска трехфазного двигателя в качестве однофазного, основывается на подключении его третьей обмотки через фазосдвигающее устройство. В качестве такого устройство может выступать активное сопротивление, индуктивность или конденсатор. Прежде, чем подключать трехфазный двигатель в однофазную сеть, необходимо убедиться, что номинальное напряжение его обмоток соответствуют номинальному…
Способы пуска двигателей CSIR и CSCR, схемы и характеристики. Асинхронный двигатель с пусковым конденсатором (CSIR) Асинхронные двигатели с пуском через конденсатор, которые также известны как электродвигатели CSIR, составляют самую большую группу однофазных электродвигателей. Двигатели CSIR представлены несколькими типоразмерами: от самых маломощных до 1,1 кВт. В электродвигателях CSIR конденсатор последовательно соединён с пусковой обмоткой. Конденсатор…
Способы пуска двигателей RSIR и PSC, схемы и характеристики. Пуск через сопротивление или ли пусковую обмотку с повышенным сопротивлением (RSIR) Данный тип двигателей ещё известен как «электродвигатели с расщеплённой фазой». Они, как правило, дешевле однофазных электродвигателей других типов, используемых в промышленности, но у них также есть некоторые ограничения по производительности. Пусковое устройство электродвигателей RSIR…
Однофазные асинхронные двигатели чаще всего применяются в бытовой технике. Система электроснабжения построена так, что в наш дом подводится только однофазная электрическая сеть. Поэтому в бытовых сетях широко используются однофазные асинхронные двигатели. Однофазные асинхронные электродвигателям переменного тока отличает прочная конструкция, низкая стоимость, к тому же они не требуют технического обслуживания. Промышленность выпускает однофазные двигатели на небольшие…
Для модернизации гидростанции необходимо спроектировать электропривод шестеренного насоса НШ-100, техническим заданием на проект является возможность регулирования производительностью насоса в пределах от 55 до 120 л/мин. В качестве приводного электродвигателя выберем асинхронный электродвигатель с короткозамкнутым ротором, который будет управляться преобразователем частоты. Насос НШ-100 – это насос объемного типа с рабочим объемом 100 куб. см. Данный тип…
eprivod.com
8. Электроприводы с асинхронным двигателем
ЭП с трехфазным асинхронным двигателем (АД) является самым массовым видом привода в промышленности, в коммунальном и сельском хозяйстве. Такое положение определяется простотой изготовления и эксплуатации АД, меньшими по сравнению с ДПТ массой, габаритными размерами и стоимостью, а также высокой надежностью в работе. В народном хозяйстве наибольшее распространение получили АД с короткозамкнутым ротором.
Основной областью применения АД вплоть до недавнего времени являлся нерегулируемый электропривод. В последние годы в связи с разработкой и выпуском электротехнической промышленностью тиристорных преобразователей частоты и напряжения стали создаваться регулируемые асинхронные ЭП с характеристиками, не уступающими по своим показателям ЭП постоянного тока.
8.1. Механические характеристики асинхронных двигателей
Основная схема включения трехфазного АД в сеть и соответствующая ей однофазная схема замещения с вынесенным контуром намагниченности показаны на рисунке 8.1 [1,2].
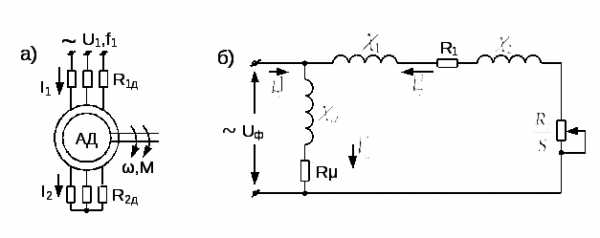
Рис.8.1. Схема включения (а) и однофазная схема замещения (б) АД
На схеме приняты следующие обозначения:
Uф – действующее значение фазного напряжения сети, В;
 –фазные токи
соответственного намагничивания,
обмотки статора и приведенный ток
ротора, А;
–фазные токи
соответственного намагничивания,
обмотки статора и приведенный ток
ротора, А;
 –индуктивное
сопротивление контура намагничивания,
Ом;
–индуктивное
сопротивление контура намагничивания,
Ом;
 –активные фазные
сопротивления обмоток, соответственно
статора и ротора; последнее приведено
к обмотке статора, Ом;
–активные фазные
сопротивления обмоток, соответственно
статора и ротора; последнее приведено
к обмотке статора, Ом;
R1д и R2д – добавочные сопротивления в фазах статора и ротора;
 –индуктивные
фазные сопротивления, обусловленные
полями рассеяния обмоток статора и
ротора; последнее приведено к обмотке
статора, Ом.
–индуктивные
фазные сопротивления, обусловленные
полями рассеяния обмоток статора и
ротора; последнее приведено к обмотке
статора, Ом.
S – скольжение двигателя, определяется по выражению [1,4]:
где  – угловая
скорость ротора, рад/с;
– угловая
скорость ротора, рад/с;  –
угловая
скорость магнитного поля статора,
называемая синхронной, рад/с.
–
угловая
скорость магнитного поля статора,
называемая синхронной, рад/с.
 (8.2)
(8.2)
В выражении (8.2):
 –частота напряжения
питающей сети, Гц; р – число пар полюсов двигателя.
–частота напряжения
питающей сети, Гц; р – число пар полюсов двигателя.
Рассматриваемая схема замещения АД получена при определенных допущениях. В частности, ее параметры считаются не зависящими от режима работы, не учитываются насыщение магнитопровода, добавочные потери, а также влияние пространственных и временных высших гармонических составляющих (н.с.) обмоток статора и ротора.
При подведении к
обмотке статора переменного трехфазного
напряжения в статоре образуется
вращающееся магнитное поле со скоростью  .
Это поле пересекает обмотку ротора и
наводит в ней ЭДС [1]:
.
Это поле пересекает обмотку ротора и
наводит в ней ЭДС [1]:
, (8.3)
где  <
1 – обмоточный коэффициент, учитывающий
уменьшение ЭДС ротора вследствие
геометрического сложения ЭДС, и укорочение
шага обмотки ротора;
<
1 – обмоточный коэффициент, учитывающий
уменьшение ЭДС ротора вследствие
геометрического сложения ЭДС, и укорочение
шага обмотки ротора;
 –частота тока в
обмотке ротора, Гц;
–частота тока в
обмотке ротора, Гц;
 –число витков
обмотки фазы ротора;
–число витков
обмотки фазы ротора;
 –максимальное
значение магнитного потока статора,
Вб.
–максимальное
значение магнитного потока статора,
Вб.
Эта ЭДС создает ток в обмотке ротора
 (8.4)
(8.4)
где  –
активное сопротивление фазной обмотки
ротора;
–
активное сопротивление фазной обмотки
ротора;
 –индуктивное
сопротивление рассечения фазы роторной
обмотки.
–индуктивное
сопротивление рассечения фазы роторной
обмотки.
Взаимодействуя с полем статора, активный ток создает пусковой вращающий момент, и двигатель запускается, вращаясь в дальнейшем со скоростью
. (8.5)
При номинальном
скольжении  номинальная скорость .
номинальная скорость .
Для обычных
двигателей  =
0,02÷0,06, для двигателей с повышенным
скольжением
=
0,02÷0,06, для двигателей с повышенным
скольжением  = 0,08÷0,18.
= 0,08÷0,18.
Запуск электродвигателя происходит по следующей механической характеристике (рис. 8.2).
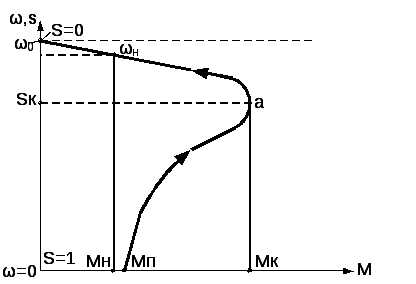
Рис. 8.2. Механическая характеристика АД
На рисунке 8.2 обозначено: Мп – пусковой момент; Мк – критический момент; Мн – номинальный момент; Sк – критическое скольжение.
Так как ЭДС, индуктированная в обмотке ротора в момент пуска имеет максимальное значение (при S=1, f2=50 Гц), то ток в обмотке ротора I2 = (4–8)Iн.д. (Iн.д – номинальный ток двигателя).
Однако на пусковой момент влияет не эта величина пускового тока (I2 = Iп), а сдвиг фаз между током I2 и ЭДС Е2s ротора.
Если индуктивность обмотки ротора велика, то будет большим и сдвиг фаз между током ротора I2 и ЭДС ротора Е2s.
В момент пуска,
когда ротор еще неподвижен, частота
тока в обмотке ротора наибольшая ( =
= =50
Гц), и поэтому индуктивное сопротивление
=50
Гц), и поэтому индуктивное сопротивление имеет наибольшее
максимальное значение
имеет наибольшее
максимальное значение  :
:
, (8.6)
где  –
индуктивность рассеяния фазы обмотки
ротора.
–
индуктивность рассеяния фазы обмотки
ротора.
Вращающий момент АД определяется по формуле [1]
, (8.7)
а коэффициент
мощности  – по выражению [1]
– по выражению [1]
. (8.8)
В формуле (8.7):  –
обмоточный коэффициент;
–
обмоточный коэффициент;  –
угол сдвига фаз между ЭДС и током фазы
обмотки ротора.
–
угол сдвига фаз между ЭДС и током фазы
обмотки ротора.
Таким образом, момент двигателя определяется активной слагающей пускового полного тока ротора .
Пусковой момент
двигателя можно увеличить, если в момент
пуска уменьшить сдвиг фаз меду током
I2 и ЭДС E2S ротора. Это приведет к тому,
что
увеличится  .
ПриR2доб = 0 и ω = 0
.
ПриR2доб = 0 и ω = 0  = 0,1÷0,2. ПриR2доб ≠ 0
= 0,1÷0,2. ПриR2доб ≠ 0  = 0,3–0,6. При ω = ωн
= 0,3–0,6. При ω = ωн  = 0,8÷0,9. На
практике этим способом часто пользуются.
Для этого в цепь ротора вводят активное
сопротивление, которое затем выводят
как только двигатель увеличит скорость,
либо применяют двигатель, у которого
на роторе глубокие пазы для стержней,
либо две клетки (две короткозамкнутые
обмотки).
= 0,8÷0,9. На
практике этим способом часто пользуются.
Для этого в цепь ротора вводят активное
сопротивление, которое затем выводят
как только двигатель увеличит скорость,
либо применяют двигатель, у которого
на роторе глубокие пазы для стержней,
либо две клетки (две короткозамкнутые
обмотки).
Таким образом, пусковой момент двигателя зависит от конструкции ротора.
При пуске АД с
уменьшением скольжения от S
= 1 до S
= Sк
уменьшаются частота  и ЭДС Е2,
полный ток I2 уменьшается очень медленно (всего на 29 % от I2п),
а
и ЭДС Е2,
полный ток I2 уменьшается очень медленно (всего на 29 % от I2п),
а  и активный токI2а значительно увеличиваются. При дальнейшем
пуске АД от S
= Sк
до S
= 0 токи I2 и I2а резко уменьшаются при незначительном
росте
и активный токI2а значительно увеличиваются. При дальнейшем
пуске АД от S
= Sк
до S
= 0 токи I2 и I2а резко уменьшаются при незначительном
росте  .
Такие изменения параметров в цепи ротора
и определяют вид характеристики (рис.
8.2).
.
Такие изменения параметров в цепи ротора
и определяют вид характеристики (рис.
8.2).
Для вывода уравнения механической характеристики и ее построения обычно пользуются схемой замещения двигателя (рис. 8.1б), рассматривая баланс мощности в двигателе.
Электромагнитная мощность Р12, передаваемая ротору от статора, определяется электромагнитным моментом М, развиваемым двигателем: Р12 = Мω0. Здесь, как и ранее, считается, что электромагнитный момент двигателя приблизительно равен моменту на его валу, т.е. не учитываются механические потери.
Мощность, передаваемую ротору, можно разделить на две составляющие: мощность, преобразуемую в механическую Рм, и мощность потерь ∆Рэл.2 в роторе. Первая составляющая может быть определена следующим образом: Рм = Мω. Вторая составляющая представляет собой электрические потери в обмотках ротора и потери на перемагничивание.
Как правило, потери в стали ротора существенно меньше электрических потерь, в связи с чем последними можно пренебречь. Тогда
Р12 =Рм + ∆Рэл.2, (8.9)
или Мω0 = Мω +∆Рэл.2.
Отсюда
∆Рэл.2 = М(ω0 – ω) = Мω0S. (8.10)
Учитывая, что
∆Рэл.2 =  ,
(8.11)
,
(8.11)
где  =
= ,
можно записать выражение для момента
в виде
,
можно записать выражение для момента
в виде
 .
(8.12)
.
(8.12)
Из схемы замещения [1,2]
 ,
(8.13)
,
(8.13)
где – индуктивное фазное сопротивление короткого замыкания.
Выражение (8.13)
представляет собой уравнение
электромеханической характеристики
двигателя  ,
так как скольжение
,
так как скольжение  однозначно определяет величину скорости
двигателя .
однозначно определяет величину скорости
двигателя .
Отметим, что для АД обычно под электромеханическими и механическими характеристиками понимаются зависимости момента и тока от скольжения. В этом случае соответствующие уравнения получают более компактную форму записи и оказываются удобными для вычисления.
Подстановка (8.13) в (8.12) дает уравнение механической характеристики [1,2,3,4]:
 .
(8.14)
.
(8.14)
Максимальное
значение момента Мк принято называть
критическим (допустимым перегрузочным
моментом). Соответствующее ему скольжение
Sк
также называется критическим.
Для определения Sк
необходимо решить уравнение вида  ,
подставив в него М(S).
,
подставив в него М(S).
Решение этого уравнения дает:
 .
(8.15)
.
(8.15)
Подставляя значение  в уравнение (8.14), находим:
в уравнение (8.14), находим:
. (8.16)
Знак (+)
соответствует S
> 0, а (–) – S
< 0. Знаки « »
в уравнении (8.16) означают, что максимум
момента может иметь место при S
> 0 в двигательном режиме или в режиме
противовключения, а при S
< 0 – в генераторном режиме.
»
в уравнении (8.16) означают, что максимум
момента может иметь место при S
> 0 в двигательном режиме или в режиме
противовключения, а при S
< 0 – в генераторном режиме.
Из уравнения (8.16) видно, что при работе в генераторном режиме с рекуперацией энергии критический момент больше, чем при работе в двигательном режиме или режиме противовключения.
Из уравнений (8.14) и (8.16) с учетом (8.15) может быть получена другая формула для механической характеристики:
, (8.17)
где  .
.
Для крупных машин
сопротивление  невелико, поэтому практически
невелико, поэтому практически 
 .
В этом случае получится формула, более
удобная для расчетов [1,2]:
.
В этом случае получится формула, более
удобная для расчетов [1,2]:
 ,
(8.18)
,
(8.18)
Критическое скольжение можно определять по следующему выражению:
, (8.19)
где – коэффициент перегрузочной способности.
Для уравнения
(8.18) достаточно знать лишь параметры,
которые обычно указываются в каталогах,
или могут быть найдены по данным
каталогов, тогда как такие параметры,
как  и
и  обычно неизвестны.
обычно неизвестны.
Анализ формулы (8.18) показывает, что при S > Sк (нерабочая часть характеристики) получается гипербола. Эта часть характеристики соответствует лишь пусковым и тормозным режимам.
При малых значениях скольжения (S < Sк) для М = f(S) получится уравнение прямой линии. Эта линейная часть характеристики является ее рабочей частью, на которой двигатель обычно работает в установившемся режиме. На этой же части характеристики находятся точки, соответствующие номинальным данным Мн, Iн, ωн, Sн … .
Величина номинального скольжения зависит от сопротивления ротора и мощности двигателя. Двигатель с малым сопротивлением (большой мощности) ротора имеет малые Sк и Sн и более жесткую механическую характеристику.
Анализ уравнений
(8.15) и (8.16) показывает, что Мк и Sк
уменьшаются с увеличением индуктивных
сопротивлений обмоток  и активного сопротивления
и активного сопротивления  обмотки статора.
обмотки статора.
Критическое
скольжение не зависит от питающего
напряжения и прямо пропорционально  .
Это свойство используется для увеличения
пускового момента АД с фазным ротором
при включении в цепь ротора добавочного
сопротивления R2д (рис. 8.1а).
.
Это свойство используется для увеличения
пускового момента АД с фазным ротором
при включении в цепь ротора добавочного
сопротивления R2д (рис. 8.1а).
Механические характеристики АД с фазным ротором приведены на рисунке 8.3.
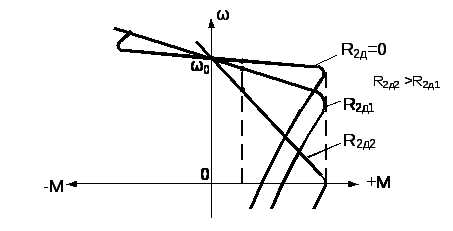
Рис. 8.3. Механические характеристики АД с фазным ротором
С увеличением сопротивления R2д снижается жесткость механических характеристик аналогично как и для ДПТ независимого возбуждения.
Момент Мк не зависит от активного сопротивления цепи ротора и пропорционален квадрату напряжения питающей сети. Снижение напряжения питающей сети на ~15 % приводит к уменьшению Мк и соответственно λ на 28 %.
studfiles.net
Асинхронный электропривод в станках с ЧПУ
Асинхронные электродвигатели с короткозамкнутым ротором – одни из наиболее распространенных двигателей переменного тока. В приводах различных узлов в основном используют трехфазные асинхронные электродвигатели, которые подключают к трехфазной промышленной сети переменного тока. Ток, проходящий по обмоткам статора, создает вращающееся магнитное поле. Вращаясь вокруг ротора, магнитное поле пересекает проводники его обмотки, наводит в них ЭДС. Соответственно в коротко-замкнутом роторе начинает протекать ток. При взаимодействии тока ротора с вращающимся магнитным полем статора появляются силы (потокосцепление статора и ротора), заставляющие ротор двигаться вслед за магнитными полем. Создающийся вращающий электромагнитный момент пропорционален магнитному потоку поля статора и току ротора.
Асинхронные машины общепромышленного применения
ЭДС и частота в обмотке ротора зависят от скорости пересечения вращающим полем проводника обмотки ротора, т. е. от разности частоты вращения поля nо и ротора nр. Чем больше разность (n0 — nр), тем большая индуцируется э.д.с. и тем выше ее частота изменения. Следовательно, необходимым условием для возникновения в асинхронном двигателе вращающего момента является неравенство (асинхронность) частот вращения n0 и nр Именно поэтому двигатель и называется асинхронным (не синхронным). Разность частоты вращения поля статора и ротора характеризуется коэффициентом скольжения s = (n0 — nр) /n0.
Если асинхронная машина нормального исполнения, то при номинальном режиме работы скольжение должно быть в промежутке 0,01—0,1. С появлением нагрузки на валу двигателя оно повышается, что вызывает увеличение тока в обмотке ротора, а следовательно, и электромагнитного момента. Чем ниже величина скольжения, тем экономичнее работает двигатель. Вращающееся поле, которое создает обмотка статора, может быть двухполюсным, четырехполюсным и т. д. Число пар полюсов – определяют при проектировании обмотки статора. При одной и той же частоте тока в обмотке статора многополюсное поле будет вращаться медленнее, пропорционально числу пар полюсов, что часто используется при ступенчатом регулировании частоты вращения.
Важными эксплуатационными характеристиками асинхронных машин, работающих в приводах главного движения станков, являются их максимальная перегрузочная способность и кратность пускового момента (отношение максимального момента к номинальному).
Перегрузочной способностью Км называют отношение максимального момента Мтах,, развиваемого двигателем, к номинальному Мн. Это отношение составляет обычно Ки = Мтах/Мн = 1,8 — 2,5. Момент, развиваемый двигателем при пуске (nр= 0), называется пусковым моментом.
Отношение пускового момента к номинальному называют кратностью пускового момента Кп = Мпуск/Мн. Кратность пускового момента составляет 1,1 —1,8.
Чем выше перегрузочная способность Км, тем выше способность двигателя к перегрузкам. Больший пусковой момент Кп соответствует двигателям со значительным моментом нагрузки на валу.
Пуск асинхронного двигателя с короткозамкнутым ротором сопровождается довольно большим скачком пускового тока. Он иногда может в семь-десять раз превышать номинальный. Обычно двигатели малой мощности пускают прямым пуском.К числу таких двигателей относятся и двигатели приводов металлорежущих станков. Пуск мощных асинхронных приводов сопровождается большой просадкой напряжения, поэтому их пуск производят через различные пусковые устройства или пускают на холостом ходу.В некоторых механизмах иногда требуется плавный разгон двигателя. В этом случае наиболее эффективен пуск с помощью тиристорного блока управления, позволяющего плавно увеличивать частоту питающего напряжения.
Скорость вращения асинхронных двигателей с короткозамкнутым ротором как правило регулируют либо изменением числа пар полюсов, либо изменяют частоту и величину питающего напряжения на статоре машины. Первый способ позволяет довольно просто осуществить лишь ступенчатое регулирование, причем чем больше число пар полюсов обмотки, тем ниже частота вращения. При втором способе достигается плавность регулирования в широком диапазоне, но требуются специальные сложные и дорогостоящие электронные системы управления.
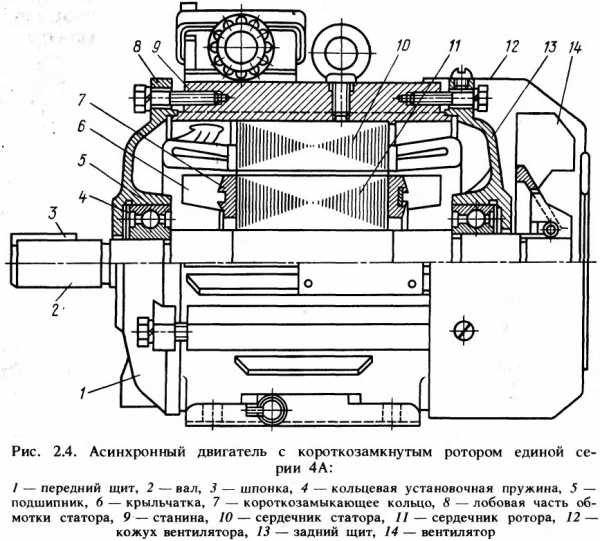
На станках применяют в основном общепромышленные асинхронные двигатели единых серий 4А и АИ (рис. 2.4).
Диапазон мощности выпускаемых двигателей единых серий полностью обеспечивает все потребности станкостроения. В состав этих серий также входят асинхронные двигатели специального исполнения: с повышенной точности по установочным раз мерам; со встроенным электромагнитным тормозом; с повышенным пусковым моментом.
В маркировке асинхронного двигателя указывается его конструктивное исполнение, материал подшипниковых щитов и станины, высота оси вращения, установочные размеры, число пар полюсов и климатическое исполнение. Например, 4А80А2УЗ — асинхронный электродвигатель четвертой серии (4А). Тип исполнения — закрытое (А), высота оси вращения 80 мм, количество пар полюсов — два (2) исполнение для умеренного климата (УЗ).
Во многих станках для подачи масла и охлаждающих жидкостей широко применяются электронасосы серий П и ПА, объединяющие в едином корпусе центробежный насос и нерегулируемый приводной асинхронный двигатель. Мощность и соответственно габаритные размеры электронасосов зависят от количества жидкости, подаваемой в единицу времени. Обычно их мощность составляет 0,1—0,6 кВт.
Электрошпиндели
К асинхронным электродвигателям относятся также широко
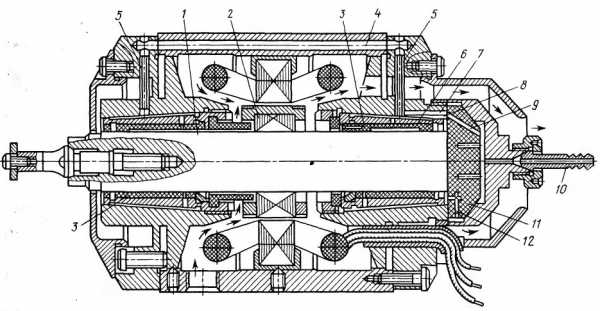 Рис.2.5. Электрошптндель
Рис.2.5. Электрошптндельгде: 1 — вал, 2 — ротор, 3 — подшипники, 4 — отверстие для подвода воздуха, 5 — трубка, 6 — воздушная камера, 7, 8, 9 — воздушные каналы, 10 — штуцер, 11 — подпятник, 12 — канал отработанного воздуха.
используемые в шлифовальных станках электрошпиндели. Электрошпиндель представляет собой встроенный асинхронный электродвигатель, на валу которого без промежуточных передач закреплен шлифовальный круг. Частота вращения электрошпинделей составляет 13 000—14 000 об/мин и выше. Столь высокая частота вращения достигается путем питания статорной обмотки токами высокой частоты. Поэтому электрошпиндели управляются специальными устройствами, преобразующими токи промышленной частоты (чаще всего 50 Гц) в токи высокой частоты (до 1000—2000 Гц).
Одним из наиболее важных узлов, ограничивающих допустимую частоту вращения шпинделя, являются опоры, в которых он вращается. В настоящее время применяют опоры обычно трех видов: гидравлические, шариковые и воздушные. Наименьшими потерями и наибольшей долговечностью обладают электрошпиндели на воздушных опорах. На рис. 2.5 изображен разрез такого электрошпинделя.
Вал 1 встроенного электродвигателя вращается в подшипниках 3 с воздушной смазкой. Между торцом вала и подпятником 11 создается воздушная подушка. Подшипники 3, состоящие из латунных вставок и графитовых вкладышей, вклеены в передний и задний щиты корпуса электрошпинделя. Через штуцер 10 и каналы 9, 7 воздух подается в камеру 6, откуда поступает в смазываемый зазор между вращающейся и неподвижной поверхностями. К переднему подшипнику воздух подводится через трубку 5 и отверстие 4. Отработанный воздух отводится по каналу 12. Для нормального безаварийного пуска электрошпинделя, в него подают воздух, для образования воздушной подушки между вкладышами и шпинделем. Данные подушки предназначены для устранения трение и уменьшения износа подшипников при пуске, создают также плавность вращения шпинделя.
В качестве преобразователей частоты для питания высокоскоростных двигателей электрошпинделей применяют как электромашинные (серии ГИС), так и электронные статические преобразователи частоты.
В связи с прогрессом в области создания электронных преобразователей частоты асинхронные электродвигатели находят применение не только в главных приводах, но и благодаря возможности плавного регулирования их частоты вращения в широких пределах в приводах подач современных металлорежущих станков.
elenergi.ru
АСИНХРОННЫЕ ЭЛЕКТРОПРИВОДЫ С ЧАСТОТНЫМ УПРАВЛЕНИЕМ
ЭЛЕКТРОПРИВОДА МЕТАЛЛОРЕЖУЩИХ СТАНКОВ
Серийные станочные регулируемые асинхронные электроприводы являются преобразователями частоты с промежуточным звеном постоянного тока. Указанные электроприводы содержат на входе понижающий сетевой трансформатор и автоматический выключатель, обычно устанавливаемый на первичной стороне трансформатора. Автоматический выключатель служит для защиты от коротких замыканий и подключения электропривода к сети. Функцию защиты от коротких замыканий в некоторых электроприводах выполняют быстродействующие плавкие предохранители, а функцию нулевой защиты электропривода — контактор на входе преобразователя.
Частота вращения вспомогательного (холостого хода) асинхронного двигателя прямо пропорциональна частоте его питания. и
Рис. 70. Характеристики двигателя: а — при изменении частоты и напряжения; б — векторная диаграмма токов |
Частота может регулироваться вверх или вниз от номинального Значения, например 50 Гц. При подаче на нагруженный двигатель номинальных частоты fтом и напряжения UHOм его обмот
ках статора протекает номинальный ток. Этому соответствует Номинальная величина индуктивного сопротивления обмоток й^ном = 2nf1H0Kb. По Мере снижения частоты одновременно уменьшается Xl. Если оставить напряжение на номинальном значении, Например 220 В, то по закону Ома начнет расти ток через обмотку статора, что может привести к ее перегоранию. Поэтому с уменьшением fi надо уменьшать напряжение на статоре U (рис. 70,а). Уменьшение напряжения U =
Если пренебречь падением напряжения на активном сопротивлении статора, то напряжение питания двигателя U можно считать равным ЭДС намагничивания двигателя Е, которая пропорциональна потоку Ф двигателя, числу витков обмотки и частоте напряжения на статоре. Так, при снижении напряжения пропорционально частоте величина потока остается близкой к номинальной. Момент двигателя пропорционален произведению тока на поток. Как известно, регулирование частоты вращения электрических двигателей вниз от номинального значения может осуществляться с постоянным (номинальным) моментом. Это обычно подразумевает работу с номинальным потоком и с постоянным (номинальным) током, т. е. при поддержании неизменным отношения U/fі регулирование производится с постоянными моментом и перегрузочной способностью. Требуемые зависимости напряжения от частоты при регулировании частоты вращения называют законами регулирования. С увеличением диапазона регулирования частоты’вращения вниз от номинальной пренебрежение падением напряжения на сопротивлении статора приводит к все большему снижению критического момента по сравнению с номинадьным. Существенная разница появляется уже при диапазоне регулирования около 1 : 3. Существуют различные способы компенсации падения напряжения на сопротивлении статора.
При компенсации падения напряжения в разомкнутой системе регулирования имеется следующее ограничение. При возрастании нагрузки от нагрузки холостого хода До номинальной увеличивается падение напряжения на сопротивлении статора, пропорциональное току. Поэтому при постоянном напряжении питания ЭДС намагничивания и соответственно поток на холостом ходу становятся больше. При существенной компенсации падения напряжения на низких частотах происходит повышение потока холостого хода и увеличение тока намагничивания. Последнее при-, водит к значительным потерям и перегреву двигателя.
Избежать указанного недостатка удается в замкнутых системах регулирования с обратными связями по параметрам”, реагирующим на изменение нагрузки. Электроприводы с небольшим диапазоном регулирования частоты вращения содержат положительную обратную связь по току двигателя, воздействующую на канал регулирования напряжения. При увеличении нагрузки возрастает ток двигателя, в результате становятся больше сигнал управления (Uy — Us + Uoc, где U0c = KocI) и напряжение питания двигателя. Указанное увеличение напряжения питания двигателя компенсирует падение напряжения на сопротивлении статора. Данная система регулирования обеспечивает сохранение критического момента двигателя на уровне номинального критического. Одновременно привод обычно содержит отрицательную обратную связь по напряжению выпрямителя, которая стабилизирует напряжение на входе инвертора при колебании напряжения сети и компенсирует падение напряжения во внутреннем сопротивлении преобразователя частоты.
Развитием описанной выше системы регулирования является САР с, так называемой обратной связью по ЭДС. В данном случае из сигнала, пропорционального напряжению двигателя, вычитается сигнал, пропорциональный произведению тока на активное сопротивление статора, т. е. вычитаемое представляет собой падение напряжения на указанном сопротивлении. Результирующий сигнал отрицательной обратной связи пропорционален внутренней ЭДС двигателя, он сравнивается с задающим сигналом, пропорциональным частоте. САР поддерживает постоянство отношения упомянутой ЭДС к частоте.
В технических требованиях к электроприводам оговаривается допустимое относительное отклонение частоты вращения (отношение абсолютного падения Ап к частоте вращения холостого хода пс). В описанной выше системе регулирования поддерживается постоянным абсолютное отклонение (падение) частоты вращения, а относительное падение частоты вращения увеличивается по мере снижения заданной частоты вращения и может превысить допустимую величину. Дальнейшее уменьшение относительного •отклонения частоты вращения достигается в САР с воздействием на канал регулирования — частоту питания. Так, в системе с обратной связью по току при увеличении нагрузки возрастает управляющий сигнал по каналу частоты, повышается частота питания двигателя (двигатель переходит на более «высокую» механическую характеристику). Поэтому при том же моменте нагрузки повышается частота вращения и снижается ее отклонение относительно точки холостого хода.
В асинхронных электроприводах с более широким диапазоном регулирования применяется обратная связь по частоте вращения. Указанная обратная связь требует установки на двигателе тахогенератора или какого-либо другого типа датчика. Отрицательная обратная связь по частоте вращения может воздействовать на канал частоты и напряжения. При увеличении нагрузки первоначально падает частота вращения, увеличивается напряжение управления. Воздействие на канал напряжения преобразователя обеспечивает поддержание постоянной перегрузочной способности (и косвенно величины потока). Воздействие на канал частоты инвертора обеспечивает уменьшение нестабильности (отклонения) частоты вращения благодаря повышению частоты питания двигателя.
Качественную работу электроприводов с более широким диапазоном регулирования обеспечивают системы частотно-токового управления. В этих системах за счет обратной связи по току управляемый выпрямитель (или инвертор с ШИР или ШИМ) становится регулятором тока, двигателю задается не напряжение, а ток. Преимущество систем частотно-токового управления состоит в том, что выходной параметр регулятора (ток статора) не зависит от частоты питания двигателя, системе легче реагировать на изменение нагрузки, так как момент пропорционален абсолютному скольжению, р = [пс—п)/«сном, которое измерить проще. Такая система работает следующим образом.
В результате вычитания сигнала обратной связи по частоте вращения из задающего сигнала определяется напряжение, пропорциональное абсолютному скольжению. Сигнал абсолютного Скольжения поступает на функциональный преобразователь, который задает величину тока по одному из законов, обеспечивающих или минимальный ток, или минимальные потери двигателя. Выходной сигнал функционального преобразователя после сравнения с сигналом обратной связи по току управляет выпрямителем. Частота питания двигателя задается в виде алгебраической суммы частоты тока ротора и частоты вращения. Далее частоту тока ротора будем называть частотой ротора. САР по частотно-токовому принципу применяется, как правило, в тиристорных электроприводах с инвертором тока.
В приводах подачи некоторых станков с ЧПУ используют высокодинамичные асинхронные электроприводы с векторным управлением. Их появление связано с тем, что традиционные системы частотного регулирования перестали удовлетворять повышенным требованиям к качеству работы электроприводов и расширенному диапазону регулирования частоты вращения.
Необходимо остановиться на новом методе построения САР частотных электроприводов, получившем название векторного. Сущность метода заключается в том, чтобы систему регулирования двигателя переменного тока сделать похожей на систему регулирования двигателя постоянного тока, у которого определяющими величинами ЯВЛЯЮТСЯ ТОК в цепи якоря /я и ток в цепи обмотки возбуждения 1 в. В системе регулирования привода формируются сигналы: Iq, пропорциональный моменту двигателя (а это аналог 1Я) ■ и Id, задающий величину магнитного потока двигателя (который является аналогом /в).
Почему появилась необходимость в разработке векторной САР? Дело в том, что в отличие от двигателей постоянного тока напряжение и ток двигателей переменного тока изменяются по синусоидальной кривой. Поэтому даже при постоянной действующей величине напряжения или тока их мгновенные значения меняются. При построении САР иметь дело с синусоидально изменяющимися переменными очень трудно. Поэтому в обычных частотных системах регулировались только действующие величины переменных и это не позволяло создавать быстродействующие асинхронные электроприводы.
Зависимости, характеризующие реальный трехфазный двигатель, преобразуются к условному двухфазному двигателю. Фазы этого двигателя расположены под углом 90° друг относительно друга. Токи и напряжения этих двух фаз принимаются за проекции обобщенных параметров статора или ротора двигателя. Эти обобщенные напряжения и токи, построенные в прямоугольной системе координат, оси которой расположены (ориентированы) вдоль двух фаз статора двигателя, называются векторами. Теперь после преобразования к двухфазному двигателю токи и напряжения в векторной форме имеют такой же характер изменения, как у двигателей постоянного тока. Данная система координат является неподвижной. Для построения САР удобно иметь дело с векторами, преобразованными из неподвижной системы координат в подвижную. Одну ось координат, называемую действительной, обозначают d, другую, называемую мнимой, обозначают q (рис. 70,6). Ось d располагают, как правило, вдоль вектора потока ротора. В этом случае оказывается, что поток двигателя можно поддерживать постоянным за счет регулирования проекции тока на ось d. Так как момент двигателя пропорционален произведению потока на ток, то при условии постоянства потока момент пропорционален проекции тока на ось q, т. е. для стабилизации момента можно регулировать составляющую /8. Теперь после двух преобразований САР можно строить по аналогии с системами электроприводов постоянного тока.
САР с векторным управлением дают возможность управлять мгновенными значениями напряжений, токов и потока двигателя. Пример такой САР с частотно-токовым управлением будет описан при рассмотрении электропривода типа Размер 2М-5-2.
Регулирование частоты вращения асинхронного двигателя, так же как для двигателя постоянного тока, выполняется двухзонным. До этого шла речь о регулировании частоты вращения вниз от номинальной с постоянным моментом. Во второй зоце происходит регулирование частоты вращения вверх от номинальной. Для регулирования в режима постоянной мощности с постоянной перегрузочной способностью теоретически требуется одновременно с увеличением частоты
изменять напряжение на статоре по зависимости UIUH0H = y fjfiaou • Однако для ряда приводов с диапазоном регулирования вверх 2:1 принято U— const. При этом режим постоянства мощности обеспечивается некоторым снижением величины перегрузочной способности относительно номинальной. Ограничение максимального напряжения питания двигателя позволяет выбрать элементы преобразователя на более низкое напряжение и получить лучшие массогабаритные показатели.
Электроприводы с частотным регулированием имеют более благоприятные переходные процессы (пуск, торможение и реверс) по сравнению с нерегулируемыми асинхронными электроприводами. Как известно, пусковой момент паспортной механической характеристики двигателя меньше критического. Пусковой ток превышает номинальный в 5—8 раз, а ток, соответствующий критическому моменту, в 3—3,5 раза. В частотно-регулируемых электроприводах обеспечивается частотный пуск, который заключается в следующем. Электропривод включается на заданную частоту не сразу, а предварительно на частоту 1—5 Гц. Начальная частота выбирается таким образом, что точка критического момента соответствует нулевой частоте вращения, т. е. момент при пуске равен критическому. Далее частота питания плавно нарастает до заданного значения с таким темпом, чтобы двигатель разгонялся по линии критических моментов. Соответственно увеличивается напряжение. Так как двигатель все время пуска работает с критическим моментом, то сокращается время пуска и пуск происходит с меньшим током, в результате чего сокращаются потери. двигателя за время пуска. Преобразователь частоты обеспечивает также бесконтактный реверс. Не требуется переключения в силовой схеме контакторов, а изменяется порядок переключения силовых управляемых ключей благодаря соответствующему изменению работы системы управления инвертором.
Ряд электроприводов обеспечивает частотное рекуперативное торможение, во время которого энергия торможения двигателя передается в сеть. Другие типы электроприводов не имеют возврата (рекуперации) энергии торможения, но также обеспечивают эффективное торможение. При торможении одновременно с частотой плавно понижается напряжение.
Рассмотрим последний случай. Во время снижения частоты как при регулировании вниз, так и при торможении, в конденсатор фильтра через вентили обратного моста поступает энергия, отдаваемая двигателем. В результате повышается напряжение на конденсаторе фильтра, что опасно для элементов инвертора. Аналогичные процессы происходят при сбросе (уменьшении) нагрузки двигателя или отключении инвертора в результате действия защиты. Для предотвращения недопустимого повышения напряжения путем разряда энергии конденсатора служит цепочка из балластного резистора и транзисторного (или тиристорного) ключа, включаемого при повышении напряжения на конденсаторе сверх допустимой величины. Требуемый темп частотного пуска или торможения может регулироваться за счет обратных связей или определяться задатчиком интенсивности.
Кривая выходного напряжения ряда преобразователей имеет прямоугольноступенчатую форму, а асинхронные двигатели предназначены для питания синусоидальным напряжением. Питание двигателя прямоугольно-ступенчатым напряжением вызывает дополнительные потери и неравномерность вращения. Дополнительные потери двигателя и неравномерность вращения зависят от типа преобразователя частоты. Инверторы с формированием выходного напряжения по способу однократной коммутации вызывают заметные дополнительные потери, а на низких частотах — неравномерность вращения. Дополнительные потери вызывают ограничение допустимого по нагреву момента двигателя. Из-за существенной неравномерности вращения данный тип электропривода не применяют в станочных приводах при диапазонах регулирования частоты вращения вниз от номинальной больше 1 : (5-НІ0). Благоприятную форму выходного напряжения имеют инверторы с синусоидальной ШИМ. При соответствующем выборе несущей частоты ограничиваются дополнительные потери в двигателе и неравномерность его вращения.
Асинхронный короткозамкнутый двигатель имеет склонность к. колебаниям частоты вращения на средних частотах. При питании двигателя от преобразователя частоты в разомкнутых системах электропривода это явление усиливается. Значительное влияние на величину колебаний двигателя имеют параметры силового фильтра на выходе выпрямителя. Для подавления колебаний в электроприводах применяются обратные связи.
Для механизмов прерывистого перемещения может быть использован шаговый режим асинхронного двигателя. Этот режим осуществляется при питании двигателя от инвертора, работающего на низкой частоте. Как известно, асинхронный двигатель на частотах ниже 5 Гц входит в шаговый режим из-за прямоугольно-ступенчатой формы тока. Преобразователь частоты состоит из выпрямителя и инвертора тока. Путем разного включения силовых ключей инвертора осуществляются’ различные комбинации подключения фаз двигателя к промежуточному звену постоянного тока. При этом получаются разнообразные углы поворота двигателя. Для обеспечения требуемого угла поворота выбирается двигатель с определенным числом пар полюсов.
Описанные выше вопросы характерны для всех электроприводов с частотным управлением, устанавливаемых на металлообрабатывающих станках. Рассмотрим работу серийных асинхронных электроприводов, предназначенных для трехфазной сети напряжением 380 В и частотой 50 Гц.
msd.com.ua
асинхронный электропривод – это… Что такое асинхронный электропривод?
- асинхронный электропривод
асинхронный электропривод
электропривод переменного тока, в котором электродвигательным устройством является асинхронный двигатель
[ГОСТ 16593-79]Тематики
- электропривод
Справочник технического переводчика. – Интент. 2009-2013.
- асинхронный электродвигатель с короткозамкнутым ротором
- асинхронный электропривод двойного питания
Смотреть что такое “асинхронный электропривод” в других словарях:
асинхронный электропривод двойного питания — Система “преобразователь частоты двигатель”, в котором обмотка статора и ротора асинхронного двигателя подключены к источнику энергии и одна из них получает питание от преобразователя частоты [ГОСТ 16593 79] Тематики электропривод … Справочник технического переводчика
Электропривод — электрический привод, совокупность устройств для преобразования электрической энергии в механическую и регулирования потока преобразованной энергии по определённому закону. Э. является наиболее распространённым типом Привода. … … Большая советская энциклопедия
Электропривод — электрический привод, совокупность устройств для преобразования электрической энергии в механическую и регулирования потока преобразованной энергии по определённому закону. Э. является наиболее распространённым типом Привода. … … Большая советская энциклопедия
Асинхронный электродвигатель — электрическая асинхронная машина для преобразования электрической энергии в механическую. Принцип работы А. э. основан на взаимодействии вращающегося магнитного поля (см. Вращающееся магнитное поле), возникающего при прохождении… … Большая советская энциклопедия
ВЕНТИЛЬНЫЙ ЭЛЕКТРОПРИВОД — электропривод, в к ром для питания двигателя и регулирования его угловой скорости используется преобразователь на управляемых электрич. вентилях (напр., тиристорах). Содержит либо управляемый преобразователь частоты, питающий двигатель перем.… … Большой энциклопедический политехнический словарь
КАСКАДНЫЙ ЭЛЕКТРОПРИВОД — регулируемый электропривод, содержащий асинхронный электродвигатель с фазным ротором, питаемый одновременно от двух источников энергии: непосредственно от сети (питает статор) и от дополнит. регулируемого источника, обеспечивающего плавное… … Большой энциклопедический политехнический словарь
Электрический привод — (сокращённо электропривод) это электромеханическая система для приведения в движение исполнительных механизмов рабочих машин и управления этим движением в целях осуществления технологического процесса. Современный электропривод … … Википедия
Карнаухов, Николай Фёдорович — В Википедии есть статьи о других людях с фамилией Карнаухов. Николай Фёдорович Карнаухов Дата рождения: 28 ноября 1938(1938 11 28) (72 года) Страна … Википедия
Рибицкис, Леонид — Леонид Рибицкис (латыш. Leonīds Ribickis; 24 августа 1947(19470824) года, Цесис) латвийский и советский ученый. Dr.sc.ing (Белорусский политехнический институт), Dr.habil.sc.ing (РТУ). Профессор РТУ. Ректор РТУ. Директор фирмы «SIA AB… … Википедия
ЭП20 — Основные данные Страна постройки … Википедия
Книги
- Регулируемый асинхронный электропривод. Учебное пособие, Фролов Юрий Михайлович, Шелякин Валерий Петрович. Рекомендовано УМО вузов РФ по агроинженерному образованию в качестве учебного пособия для студентов, осваивающих образовательные программы бакалавриата по направлению подготовки… Подробнее Купить за 2869 руб
- Регулируемый асинхронный электропривод Учебное пособие, Фролов Ю., Шелякин В.. Изложены сведения об асинхронном электроприводе, включая конструктивные особенности, физические процессы в асинхронном двигателе, его механические и электромеханические характеристики в… Подробнее Купить за 1786 руб
- Регулируемый асинхронный электропривод. Учебное пособие, Ю. М. Фролов, В. П. Шелякин. Рекомендовано УМО вузов РФ по агроинженерному образованию в качестве учебного пособия для студентов, осваивающих образовательные программы бакалавриата по направлению подготовки… Подробнее Купить за 1530 руб
technical_translator_dictionary.academic.ru
16.3. Системы асинхронного электропривода с частотно-токовым управлением
Асинхронные электроприводы с диапазоном регулирования скорости до D=100:1 и высокими требованиями к динамике, когда осуществляются частые пуски, торможения и реверсы, выполняются как системы с частотно-токовым управлением. В таких системах преобразователь частоты работает в режиме источника тока. Это достигается применением преобразователей частоты типа ПЧТ или преобразователей частоты типа ПЧН, которые охватываются отрицательной обратной связью по току. Системы регулирования осуществляет задание частоты и величины тока статора в соответствии с заданной скоростью и нагрузкой на валу двигателя. Фазное напряжение статора при питании от источника тока является неконтролируемым параметром. На рис.16.2 приведена схема замещения и векторная диаграмма асинхронного двигателя при питании от источника тока. Из векторной диаграммы следует, что при I1=const с уменьшением скольжения и, следовательно, момента на валу двигателя, ток намагничивания Iμ растет до значения равного I1. Двигатель переходит в режим насыщения. Во избежание этого ток статора I1 следует соответствующим образом регулировать в зависимости от величины тока , пропорционального моменту двигателя.
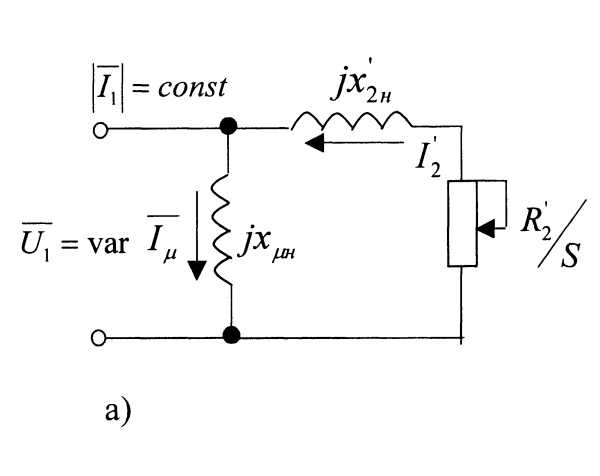
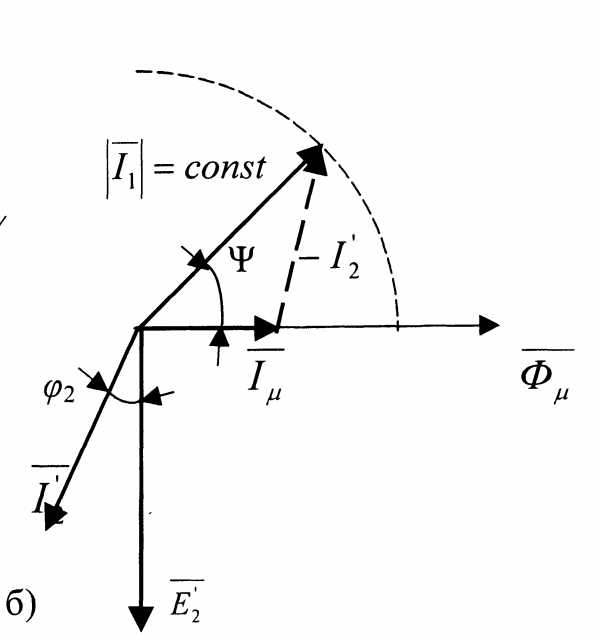
Рис.16.2. Схема замещения и векторная диаграмма при питании асинхронного двигателя от источника тока
При
питании асинхронного двигателя от
источника тока ток статора и потокосцепление
в зазоре  в установившихся режимах работы связаны
следующим соотношением
в установившихся режимах работы связаны
следующим соотношением
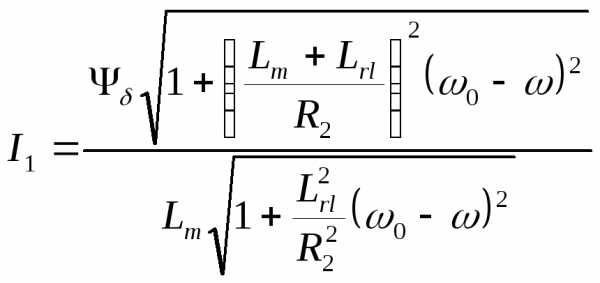 ,
(16.1)
,
(16.1)
где: Lm – индуктивность цепи намагничивания;
Lrl – индуктивность рассеяния обмотки ротора;
– абсолютное скольжение.
Поэтому
в системах асинхронного электропривода
с частотно-токовым управлением необходимо
функционально связать ток статора с
величиной абсолютного скольжения в
соответствии с (16.1). Если при этом
механические характеристики двигателя
должны иметь постоянный критический
момент, то потокосцепление  должно быть постоянным. Для этого случая
графическая зависимостьI1=f(sабс)
представлена на рис.16.3.
должно быть постоянным. Для этого случая
графическая зависимостьI1=f(sабс)
представлена на рис.16.3.
Ф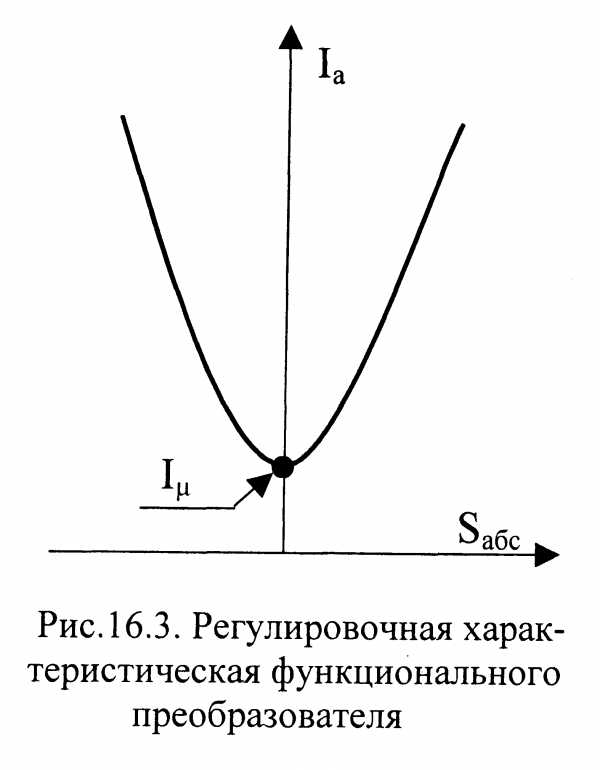 ункциональная
схема асинх-ронного электропривода с
частотно-токовым управлением приведена
на рис.16.4. В этой схеме имеется
опти-мизированный контур регулирования
тока статораI1 и разомкнутый канал регулирования
скорости, в котором задается скорость
идеального холостого хода ω0,
соответствующая скорости вращения поля
статора при данной частоте. На входе
контура тока включен функциональный
преобразователь ФП, реализующий
зависимость I1з=f(sабс).
Сигнал абсолютного скольжения
ункциональная
схема асинх-ронного электропривода с
частотно-токовым управлением приведена
на рис.16.4. В этой схеме имеется
опти-мизированный контур регулирования
тока статораI1 и разомкнутый канал регулирования
скорости, в котором задается скорость
идеального холостого хода ω0,
соответствующая скорости вращения поля
статора при данной частоте. На входе
контура тока включен функциональный
преобразователь ФП, реализующий
зависимость I1з=f(sабс).
Сигнал абсолютного скольжения  вычисляется в сумматоре на входе ФП как.
вычисляется в сумматоре на входе ФП как.
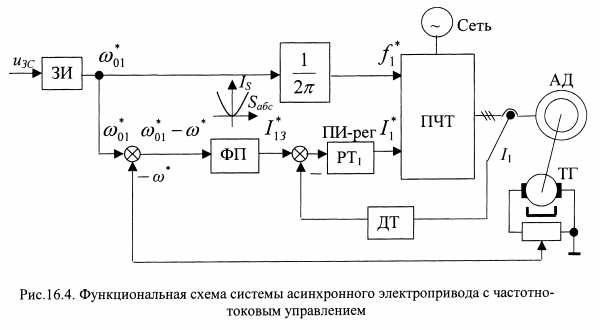
Жесткость механических характеристик в системе электропривода по схеме рис.16.4 близка к жесткости естественной механической характеристики асинхронного двигателя. Поэтому достижимый диапазон регулирования скорости в этой системе может составить примерно D=20:1.
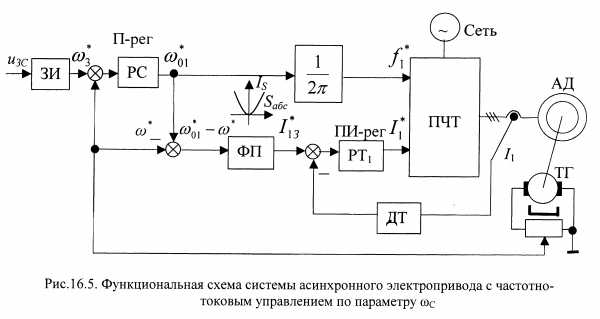
При
необходимости получения большого
диапазона регулирования следует внести
в систему замкнутый контур регулирования
скорости, как это показано на функциональной
схеме рис.16.5. Данная система управления
является двухканальной и содержит
контур скорости и контур тока, которые
настраиваются на модульный оптимум. На
выходе регулятора скорости формируется
сигнал, пропорциональный частоте питания f1 и скорости вращения поля статора. Вычитая
из этого сигнала значение действительной
скорости  ,
формируется сигнал, пропорциональный
абсолютному скольжению, который подается
на вход ФП. Функциональный преобразователь
в соответствии с зависимостью указанной
на рис.16.3 вырабатывает сигнал задания
тока статора, который подается на вход
контура тока, имеющего ПИ-регулятор.
Частотно-токовое управление может
применяться только для однодвигательных
электроприводов.
,
формируется сигнал, пропорциональный
абсолютному скольжению, который подается
на вход ФП. Функциональный преобразователь
в соответствии с зависимостью указанной
на рис.16.3 вырабатывает сигнал задания
тока статора, который подается на вход
контура тока, имеющего ПИ-регулятор.
Частотно-токовое управление может
применяться только для однодвигательных
электроприводов.
studfiles.net
4.4 Асинхронный электропривод с частотным регулированием скорости
Возможность частотного регулирования скорости асинхронного двигателя-регулирование путем изменения частоты питающего напряжения – вытекает из того обстоятельства, что скорость вращения электромагнитного поля статора пропорциональна частоте питающего напряжения
 (6.2)
(6.2)
Следует также учесть, что поскольку с изменением частоты питающего напряжения изменяется и величина потока двигателя Ф1
 (6.3)
(6.3)
то в большинстве случаев одновременно с изменением частоты питающего напряжения необходимо регулировать и его амплитуду. Необходимость регулирования напряжения при уменьшении частоты вниз от номинальной связана с тем, что из-за уменьшения индивидуального сопротивления обмоток двигателя ток намагничивания будет возрастать, что приведет к насыщению магнитопровода двигателя и его перегреву. Регулирование напряжения следует производить таким образом, чтобы скольжение двигателя было минимальным.
Рис.6.2. Схема включения асинхронного двигателя с питанием
от преобразователя частоты
Для реализации способа частотного регулирования асинхронный короткозамкнутый двигатель включается в питающую сеть с параметрами Uc и fcчерез преобразователь частотыUF(см.рис.6.2). В качестве преобразователей частоты в настоящее время используются, в основном, полупроводниковые преобразователи частоты.
Существующие вентильные регулирование скорости изменением частоты реализуется с помощью полупроводниковых преобразователей частоты которые можно разделить на две группы:
1 – преобразователи с непосредственной связью питающей сети и нагрузки, сокращенно НПЧ;
2 – преобразователи частоты с промежуточным звеном постоянного тока.
Преобразователь частоты с непосредственной связью включается в статорную цепь асинхронного двигателя и служит для преобразования напряжения стандартной частоты в регулируемое в определенных пределах напряжение по величине и частоте.
Преобразователи частоты с непосредственной связью обычно представляют собой три согласованно работающих реверсивных тиристорных преобразователя постоянного тока. Блок схема непосредственного преобразователя частоты представлена на рис.6.7.
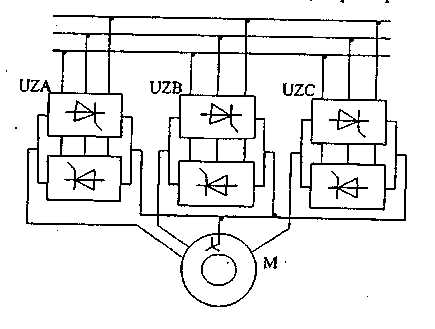
Рис.6.7. Блок-схема преобразователя частоты с непосредственной связью
Каждая фаза асинхронного двигателя питается от своего реверсивного преобразователя.
Преобразователи частоты с непосредственной связью по схеме рис.6.7 дают возможность при частоте питания 50Гц получать выходную частоту в пределах 0-20Гц. Поэтому асинхронные электроприводы данного типа чаще всего применяются для тихоходных безредукторных электроприводов средней и большой мощности.
Основным достоинством преобразователей частоты с непосредственной связью является естественная коммутация вентилей под действием напряжения питающей сети, как это происходит в управляемых тиристорных преобразователях (выпрямителях), используемых в приводе постоянного тока. Благодаря возможности перевода преобразователя из выпрямительного в инверторный режим, в рассматриваемых схемах возможно торможение асинхронного двигателя с отдачей энергии торможения в сеть (рекуперативное торможение). Механические характеристики асинхронного электропривода с преобразователем частоты с непосредственной связью показаны на рис.6.9.
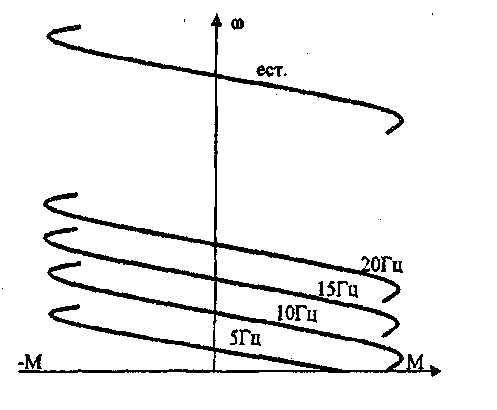
Рис.6.9. Механические характеристики электропривода НПЧ-АД
studfiles.net