Кинематическая схема что такое: КИНЕМАТИЧЕСКАЯ СХЕМА | это… Что такое КИНЕМАТИЧЕСКАЯ СХЕМА?
alexxlab | 21.03.2023 | 0 | Разное
Кинематические схемы механизмов, условные обозначения.: pavel_samuta — LiveJournal
Объекты вращаются вокруг нас. Все, от теннисного матча до полета космического зонда над планетой Нептун, связано с движением. Когда вы отдыхаете, ваше сердце перемещает кровь по венам. Даже в неодушевленных предметах есть непрерывное движение в колебаниях атомов и молекул. Могут возникнуть интересные вопросы о движении: сколько времени потребуется космическому зонду, чтобы добраться до Марса? Куда приземлится футбольный мяч, если его бросить под определенным углом? Однако понимание движения также является ключом к пониманию других концепций физики. Например, понимание ускорения имеет решающее значение для изучения силы. Некоторые специалисты называют изучение кинематики «геометрией движения».
Для описания движения кинематика изучает траектории точек, линий и других геометрических объектов, а также их дифференциальные свойства (такие как скорость и ускорение). Без кинематической схемы невозможно представить себе какое-либо оборудование. Речь идет об автомобилях, тракторах, станках и более простых типах техники. Вообще кинематика – это раздел классической механики, который направлен на изучение свойств звеньев механизмов. Наука позволяет проводить кинематический анализ, изучая траектории звеньев, определяя точки, положения и скорости элементов. Достижение конечного результата невозможно без обоснования понятия «кинематическая схема», о котором пойдет речь в этой статье.
Речь идет об автомобилях, тракторах, станках и более простых типах техники. Вообще кинематика – это раздел классической механики, который направлен на изучение свойств звеньев механизмов. Наука позволяет проводить кинематический анализ, изучая траектории звеньев, определяя точки, положения и скорости элементов. Достижение конечного результата невозможно без обоснования понятия «кинематическая схема», о котором пойдет речь в этой статье.
Кинематические схемы механизмов определяют их конструкцию. Если дать этому определению определение, то это совокупность всех элементов устройства и отношений между ними. Когда на чертежах не требуется показывать конструкцию изделия и отдельных деталей, а достаточно показать лишь принцип работы изделия, передачу движения (кинематику машины или механизма), пользуются схемами. Если кратко ответить на этот вопрос, то кинематическая схема – это некий чертеж или, так сказать, документ, на котором изображены все механические звенья с указанием размеров. Наличие размеров необходимо для кинематического анализа, изучающего основы движения механизмов, их траектории и скорости.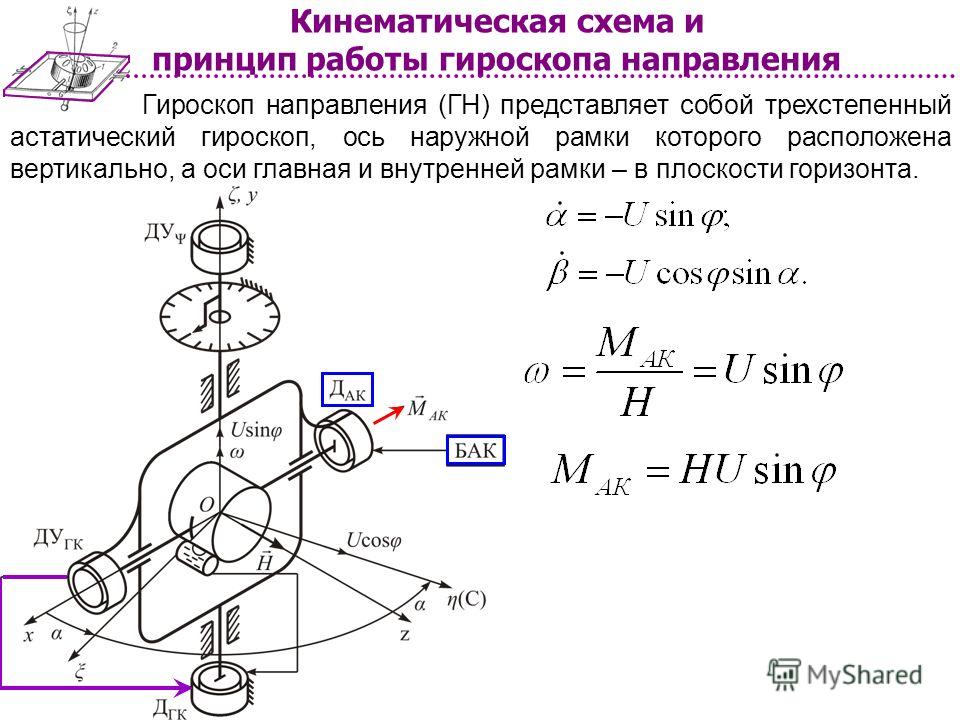
ТММ – это наука, изучающая структуру, кинематику и динамику механизмов и машин при их анализе и синтезе.
Схема, как и чертеж, — графическое изображение. Разница заключается в том, что на схемах детали изображаются с помощью условных графических обозначений. Эти обозначения представляют собой значительно упрощенные изображения, напоминающие детали лишь в общих чертах. Кроме того, на схемах изображаются не все детали, из которых состоит изделие. Показывают лишь те элементы, которые участвуют в передаче движения жидкости, газа и т. п. Элемент кинематической пары или звена – это система поверхностей и линий, по которым одно звено контактирует с другим. Эта точка также называется узлом соединения.
Очень часто звенья цепи называют кинематическими парами. Если мы определяем научный язык, то это сопряженные твердые элементы в количестве не менее двух штук, которые в силу условий соединения ограничивают движение друг друга. Кинематическая схема применяется абсолютно во всех областях промышленности – машиностроении, станкостроении и др.
Как видно из таблицы, вал, ось, стержень, шатун обозначаются сплошной утолщенной прямой линией. Винт, передающий движение, обозначается волнистой линией. Зубчатые колеса обозначают окружностью, проведенной штрихпунктирной линией на одной проекции, и в виде прямоугольника, обведенного сплошной линией, на другой . При этом, как и в некоторых других случаях (передача цепью, передачи реечные, муфты фрикционные и др.), применяются общие обозначения (без уточнения типа) и частные обозначения (с указанием типа). На общем обозначении, например, тип зубьев зубчатых колес не показывают вовсе , а на частных обозначениях показывают тонкими линиями. Пружины сжатия и растяжения обозначаются зигзагообразной линией.
Условные обозначения на кинематических схемах Условные обозначения на кинематических схемах (продолжение)- общее обозначение двигателя без уточнения типа
- общее обозначение электродвигателя
- электродвигатель на лапах
- электродвигатель фланцевый
- электродвигатель встроенный
- вал, ось, стержень, шатун и т.
 п.
п. - конец шпинделя для центровых работ
- конец шпинделя для патронных работ
- конец шпинделя для работ с цанговым патроном
- конец шпинделя для сверлильных работ
- конец шпинделя для расточных работ с планшайбой
- конец шпинделя для фрезерных работ
- конец шпинделя для кругло-, плоско- и резьбошлифовальных работ
- ходовой винт для передачи движения
- неразъемная маточная гайка скольжения
- неразъемная маточная гайка с шариками
- разъемная маточная гайка скольжения
- радиальный подшипник без уточнения типа
- радиально-упорный односторонний подшипник без уточнения типа
- радиально-упорный двусторонний подшипник без уточнения типа
- упорный односторонний подшипник без уточнения типа
- упорный двусторонний подшипник без уточнения типа
- радиальный подшипник скольжения
- радиальный самоустанавливающийся подшипник скольжения
- радиально-упорный односторонний подшипник скольжения
- радиально-упорный двусторонний подшипник скольжения
- упорный односторонний подшипник скольжения
- упорный односторонний подшипник скольжения
- упорный двусторонний подшипник скольжения
- упорный двусторонний подшипник скольжения
- радиальный подшипник качения (общее обозначение)
- радиальный роликовый подшипник
- радиальный самоустанавливающийся подшипник качения
- радиально-упорный односторонний подшипник качения
- радиально-упорный односторонний подшипник качения
- радиально-упорный двусторонний подшипник качения
- радиально-упорный двусторонний подшипник качения
- радиально-упорный роликовый односторонний подшипник
- упорный односторонний подшипник качения
- упорный односторонний подшипник качения
- упорный двусторонний подшипник качения
- свободное для вращения соединение детали с валом
- подвижное вдоль оси соединение детали с валом
- соединение детали с валом посредством вытяжной шпонки
- глухое, неподвижное соединение детали с валом
- глухое жесткое соединение двух соосных валов
- глухое соединение валов с предохранением от перегрузки
- эластичное соединение двух соосных валов
- шарнирное соединение валов
- телескопическое соединение валов
- соединение двух валов посредством плавающей муфты
- соединение двух валов посредством зубчатой муфты
- соединение двух валов предохранительной муфтой
- кулачковая односторонняя муфта сцепления
- кулачковая двусторонняя муфта сцепления
- фрикционная муфта сцепления (без уточнения вида и типа)
- фрикционная односторонняя муфта (общее обозначение)
- фрикционная односторонняя электромагнитная муфта
- фрикционная односторонняя гидравлическая или пневматическая муфта (общее обозначение)
- фрикционная двусторонняя муфта (общее обозначение)
- фрикционная двусторонняя электромагнитная муфта
- фрикционная двусторонняя гидравлическая или пневматическая муфта (общее обозначение)
- фрикционная конусная односторонняя муфта
- фрикционная конусная двусторонняя муфта
- фрикционная дисковая односторонняя муфта
- фрикционная дисковая двусторонняя муфта
- фрикционная муфта с колодками
- фрикционная муфта с разжимным кольцом
- самовыключающая односторонняя муфта обгона
- самовыключающая двусторонняя муфта обгона
- самовыключающая центробежная муфта
- тормоз конусный
- тормоз колодочный
- тормоз ленточный
- тормоз дисковый
- тормоз дисковый электромагнитный
- тормоз дисковый гидравлический или пневматический
- шарнирное соединение стержня с неподвижной опорой с движением только в плоскости чертежа
- соединение стержня с опорой шаровым шарниром
- маховик, жестко установленный на валу
- эксцентрик, установленный на конце вала
- конец вала под съемную рукоятку
- рычаг переключения
- рукоятка, закрепленная на конце вала
- маховичок, закрепленный на конце вала
- передвижные упоры
- шарнирное соединение кривошипа 87а – шарнирное соединение кривошипа постоянного радиуса с шатуном 87б – шарнирное соединение кривошипа переменного радиуса с шатуном 87в – шарнирное соединение кривошипа постоянного радиуса с шатуном 87г – шарнирное соединение кривошипа переменного радиуса с шатуном
- шарнирное соединение вала 88а – шарнирное соединение одноколейного вала с шатуном 88б – шарнирное соединение многоколенного вала с шатуном 88в – коленвал с жестким противовесом88г – коленвал с маятниковым противовесом
- кривошипно-кулисный механизм 89а – кривошипно-кулисный механизм с поступательно движущейся кулисой 89б – кривошипно-кулисный механизм с вращающейся кулисой 89в – кривошипно-кулисный механизм с качающейся кулисой
- односторонний храповой зубчатый механизм с наружным зацеплением
- двусторонний храповой зубчатый механизм с наружным зацеплением
- односторонний храповой зубчатый механизм с внутренним зацеплением
- мальтийский механизм с радиальным расположением пазов с наружным зацеплением
- мальтийский механизм с радиальным расположением пазов с внутренним зацеплением
- фрикционная передача с цилиндрическими роликами наружного зацепления (контакта)
- фрикционная передача с цилиндрическими роликами внутреннего зацепления (контакта)
- фрикционная передача с коническими роликами наружного зацепления
- регулируемая фрикционная передача с коническими роликами внутреннего зацепления
- регулируемая фрикционная передача с коническими шкивами и промежуточным кольцом
- регулируемая фрикционная передача с подвижными коническими шкивами и клиновым ремнем
- регулируемая фрикционная передача с тороидными шкивами и поворотными сферическими роликами
- регулируемая фрикционная передача с полутороидными шкивами (типа Светозарова)
- регулируемая торцовая фрикционная передача
- регулируемая фрикционная передача со сферическими и коническими роликами
- регулируемая фрикционная передача со сферическими и цилиндрическими роликами
- фрикционная передача с цилиндрическими роликами
- фрикционная передача с гиперболоидными роликами
- шкив ступенчатый, закрепленный на валу
- шкив холостой на валу
- шкив рабочий, закрепленный на валу
- указатели вращения вала соответственно: по часовой стрелке, против часовой стрелки и в обе стороны
- открытая передача плоским ремнем
- открытая передача плоским ремнем с натяжным роликом
- перекрестная передача плоским ремнем
- полуперекрестная передача плоским ремнем
- угловая передача плоским ремнем
- отводка ремня плоскоременной передачи
- передача клиновидными (текстропными) ремнями
- передача круглым ремнем или шнуром
- общее обозначение цепной передачи без уточнения типа
- роликовая цепная передача
- бесшумная (зубчатая) цепная передача
- цилиндрическая зубчатая передача с внешним зацеплением (общее обозначение)
- цилиндрическая зубчатая передача с внешним зацеплением между параллельными валами, соответственно с косыми, прямыми и шевронными зубьями
- цилиндрическая зубчатая передача с внутренним зацеплением между параллельными валами (общее обозначение)
- коническая зубчатая передача 126а – коническая зубчатая передача между пересекающимися валами (общее обозначение без уточнения типа) 126б – коническая зубчатая передача соответственно с прямыми, спиральными и круговыми зубьями
- коническая гипоидная зубчатая передача
- зубчатая реечная передача, соответственно с шевронными, косыми и прямыми зубьями
- общее обозначение зубчатой реечной передачи
- реечная передача с червячной рейкой и червяком
- реечная передача с зубчатой рейкой и червяком
- винтовая зубчатая передача соответственно под прямым или острым углом
- червячная передача 133а – червячная глобоидная передача 133б – червячная передача с цилиндрическим червяком
 п.
п.Условные знаки, применяемые в схемах, вычерчивают, не придерживаясь масштаба изображения. Однако соотношение размеров условных графических обозначений взаимодействующих элементов должно примерно соответствовать действительному соотношению их размеров. При повторении одних и тех же знаков нужно выполнять их одинакового размера. Документ может быть оформлен как на бумажном, так и на электронном носителе. Схемы оформления рекомендуется составлять на одном листе с возможностью разделения его на необходимые форматы при печати.
Однако соотношение размеров условных графических обозначений взаимодействующих элементов должно примерно соответствовать действительному соотношению их размеров. При повторении одних и тех же знаков нужно выполнять их одинакового размера. Документ может быть оформлен как на бумажном, так и на электронном носителе. Схемы оформления рекомендуется составлять на одном листе с возможностью разделения его на необходимые форматы при печати.
При изображении валов, осей, стержней, шатунов и других деталей применяют сплошные линии толщиной s. Подшипники, зубчатые колеса, шкивы, муфты, двигатели обводят линиями примерно в два раза тоньше. Тонкой линией вычерчивают оси, окружности зубчатых колес, шпонки, цепи. Документ предоставляется в виде развертки.
Кинематическая схемаПри выполнении кинематических схем делают надписи. Для зубчатых колес указывают модуль и число зубьев. Для шкивов записывают их диаметры и ширину. Мощность электродвигателя и его частоту вращения также указывают надписью типа N = 3,7 кВт, п = 1440 об/мин.
Элементы кинематических схем включают двигатель, который является системой отсчета для всех движущихся компонентов, каждому кинематическому элементу, изображенному на схеме, присваивают порядковый номер, начиная от двигателя. Валы нумеруют римскими цифрами, остальные элементы — арабскими. Важным моментом в этом процессе проектирования является степень свободы системы звеньев и шарниров, которая определяется с помощью критерия Чебычева – Грюблера – Куцбаха. После выполнения этой стадии проектирования Вы видите «скелет» вашего будущего изделия, заложенные в него идеи. В дальнейшем проводите реализацию Ваших идей в виде конструкторской документации и в виде реальных изделий.
Порядковый номер элемента проставляют на полке линии-выноски. Под полкой указывают основные характеристики и параметры кинематического элемента.
Если схема сложная, то для зубчатых колес указывают номер позиции, а к схеме прикладывают спецификацию колес.В комментариях вы можете задавать вопросы которые вас волнуют, и на данный момент вы не нашли ответ на них. Вам хочется что-то улучшить или есть замечательная идея модернизации, но к сожалению, нет кинематической схемы, я помогу реализовать все смелые идеи.
Обозначение элементов кинематических схем
Конструкторы, разрабатывающие различные машины и механизмы, часто выполняют кинематические схемы. При этом они руководствуются нормами и требованиями, изложенными в таком основополагающем документе, как ГОСТ 2.770–68.
В технике под схемой понимается графическое изображение, на котором показаны составные части изделия, их конструктивные особенности, а также существующие между ними связи с помощью упрощенных обозначений и символов. В составе пакетов конструкторской документации схемы играют достаточно важную роль. Они наличествуют как в общих описаниях изделий, инструкциях по их установке, наладке и эксплуатации. Схематические чертежи оказывают неоценимую помощь персоналу, занимающемуся монтажом, пуско-наладкой, ремонтом машин, механизмов и отдельных агрегатов. Схемы дают возможность быстро разобраться в том, каковы функциональные связи существуют между механическими, гидравлическими, электрическими и другими звеньями и системами технических устройств.
Когда разработка какой-либо машины только начинается, конструкторы от руки вычерчивают общий набросок будущего изделия, то есть составляют его первоначальную схему. На ней условно отображаются все основные узлы, а также показываются взаимосвязи между ними. Только после того, как принципиальная схема устройства отработана, начинается разработка чертежей и прочей конструкторской документации.
В современном машиностроении наибольшее применение находят те машины, в которых передача движения основывается на механическом, гидравлическом или электрическом принципе функционирования.
Предназначением кинематических схем является отражение той связи, в которой состоят рабочий механизм и привод. Следует отметить, что в современных автомобилях, станочном и прочем технологическом оборудовании механические передачи отличаются большой сложностью и содержат множество элементов. Поэтому для того, чтобы правильно создавать схемы таких конструкций, нужно прекрасно знать все условности, которые используются для графического изображения принципа работы машины или механизма без того, чтобы уточнять их конструктивные особенности. К примеру, кинематические схемы станочного оборудования отражают то, каким именно образом вращательное движение вала электродвигателя сообщается шпинделю, причем контур станка показывается (или не показывается) тонкой линией.
Если на схемах используются нестандартизованые условные обозначения, то они требуют пояснений. Что касается внешних очертаний и схематических разрезов, то на схемах они изображаются упрощенно, в соответствии с тем, какую именно конструкцию имеет каждый элемент изделия.
На схематических изображениях от каждой составной их части проводятся линии-выноски. От сплошных линий они начинаются стрелками, а от плоскостей – точками. На полках линий-выносок указываются порядковые номера позиций. При этом для таких элементов, как валы, используются римские цифры, а для остальных – арабские цифры. Под полками линий-выносок указываются параметры и основные характеристики составных частей схем.
Кинематическая схема | 615 публикаций | 7927 цитат | Ведущие авторы
Журнальная статья•DOI•
Распознавание действий человека в видео с использованием кинематических признаков и обучения в нескольких экземплярах
[…]
Саад Али 1 , Мубарак Шах 2 •Учреждения (3)
Университет Карнеги-Меллона
1 , Университет Центральной Флориды 201 февраля 2010 г. — IEEE Transactions on Pattern Analysis and Machine Intelligence
TL;DR: Предлагается набор кинематических характеристик, полученных из оптического потока для распознавания действий человека в видео, включая дивергенцию, завихренность, симметричные и антисимметричные поля потока, а также третий главный инвариант тензора скорости вращения.
…читать дальшечитать меньше
Аннотация: Мы предлагаем набор кинематических признаков, полученных из оптического потока для распознавания действий человека в видео. Набор кинематических признаков включает дивергенцию, завихренность, симметричное и антисимметричное поля течения, второй и третий главные инварианты тензора градиента течения и скорости деформации и третий главный инвариант тензора скорости вращения. Каждая кинематическая характеристика, вычисляемая из оптического потока последовательности изображений, порождает пространственно-временной паттерн. Затем предполагается, что репрезентативная динамика оптического потока фиксируется этими пространственно-временными паттернами в форме доминирующих кинематических трендов или кинематических режимов. Эти кинематические режимы вычисляются путем выполнения анализа основных компонентов (PCA) на пространственно-временных объемах кинематических признаков. Для классификации мы предлагаем использовать множественное обучение (MIL), в котором каждое видео действия представлено набором кинематических режимов. Затем каждое видео встраивается в пространство признаков на основе кинематического режима, а координаты видео в этом пространстве используются для классификации с использованием алгоритма ближайшего соседа. Качественные и количественные результаты сообщаются о контрольных наборах данных.
…читать дальшеЧитать меньше
472 цитаты
Журнальная статья•DOI•
Сингулярный анализ замкнутых кинематических цепей
[…]
Фрэнк С. Парк 1 0 1 , Джинвук Institutions (1)
Seoul National University 1
01 Mar 1999-Journal of Mechanical Design
Аннотация: В статье представлен координатно-инвариантный дифференциально-геометрический анализ кинематических особенностей замкнутых кинематических цепей, содержащих как активные, так и пассивные шарниры. Используя геометрическую структуру, разработанную Парком и Кимом (1996) для анализа манипулируемости замкнутой цепи мы классифицируем особенности замкнутой цепи на три основных типа: (i) те, которые соответствуют особым точкам конфигурационного пространства сочленения (особенности конфигурационного пространства), (ii) те, которые индуцируются выбором приводимых в действие сочленений (актуатор сингулярности) и (iii) те конфигурации, в которых рабочий орган теряет одну или несколько степеней свободы доступного движения (сингулярности рабочего органа). Предлагаемая геометрическая классификация обеспечивает высокоуровневую таксономию особенностей механизмов, которая не зависит от выбора локальных координат, используемых для описания кинематики, и включает механизмы, которые имеют больше приводов, чем кинематических степеней свободы.
… Прочитайте Moreread Less
215 Цитаты
Статья по разбирательствам •
Кинематический анализ 6R Манипулятора общей геометрии
[…]
Madhusudan Raghaven, Bernard Roth
01 Feb 1991
TL, T. ;DR: В данной работе представлено новое решение обратной задачи кинематики для манипулятора общей геометрии серии 6R, который имеет 6 вращательных (R) сочленений, расположенных последовательно.
…читать дальшечитать меньше
Аннотация: В работе представлено новое решение обратной задачи кинематики для манипулятора общей геометрии серии 6Р. Такой манипулятор имеет 6 вращающихся (R) сочленений, расположенных последовательно. Длины звеньев, углы поворота и смещения могут быть произвольными действительными числами. Задача обратной кинематики может быть сформулирована следующим образом: учитывая (i) геометрию манипулятора (т. значения углов суставов, при которых рука будет находиться в целевом положении.
…читать дальшеЧитать меньше
161 цитата
Патент•
Конфигурация контроля семи степеней свободы рук
[…]
Homayoun Seraji
sevengrade2 Abstract: A 1993 9000
-манипулятор робота с конечным эффектором с шестью степенями свободы управляется процессором, использующим матрицу Якоби 6 на 7 для определения местоположения и ориентации концевого эффектора с точки зрения углов поворота суставов, матрица Якоби 1 (или более) на 7 для определения 1 (или более) заданных пользователем кинематических функций, ограничивающих положение или движение выбранных частей руки с точки зрения углов сустава, процессор объединяет две матрицы Якоби для получения расширенная матрица Якоби 7 (или более) на 7, процессор осуществляет управление путем вычисления в соответствии с прямой кинематикой из расширенной матрицы Якоби 7 на 7 и из семи углов суставов руки набор из семи требуемых суставов углы для t стыковка с шарнирными сервоприводами ручек. Одна из кинематических функций ограничивает ориентацию локтевой плоскости руки. Еще одна из кинематических функций, минимизирующая сумму моментов силы тяжести на суставах. Еще одна из кинематических функций ограничивает положение рычага для предотвращения столкновения. В общем случае одна из кинематических функций минимизирует сумму выбранных механических параметров по меньшей мере некоторых суставов, связанных с весовыми коэффициентами, которые могут изменяться при движении руки. Механические параметры могут быть ошибками скорости, ошибками положения или моментами силы тяжести, связанными с отдельными соединениями.
…читать дальшеЧитать меньше
159 цитирований
Журнальная статья•DOI•
Кинематический анализ механизмов позиционирования с тремя степенями свободы для использования в гибридных кинематических машинах
[…]
Lung-Wen Tsai 190 , Самир А. Джоши 2 •Учреждения (2)
Калифорнийский университет, Риверсайд 1 , Университет Мэриленда, Колледж-Парк 2
01 июня 2002 г. — Journal of Mechanical Design
3 Abstract: 90 представляет новую кинематическую архитектуру, называемую гибридной кинематической машиной. Гибридный кинематический станок обычно состоит из механизма позиционирования и механизма ориентации, которые могут быть расположены последовательно или параллельно для реализации концепции модульных и реконфигурируемых обрабатывающих центров. Для демонстрации концепции были идентифицированы четыре параллельных манипулятора с характеристиками поступательного движения. Описана кинематика этих механизмов. Затем максимизируется хорошо кондиционированное рабочее пространство каждого механизма и сопоставляются свойства жесткости. Сравнение объема рабочего пространства и свойств жесткости этих четырех механизмов показывает, что манипулятор 3-RUU является лучшей конструкцией среди четырех архитектур.
…читать дальшеЧитать меньше
154 цитирования
Категория:Кинематические диаграммы — Wikimedia Commons
Из Викисклада, бесплатного репозитория мультимедиа
Перейти к навигацииПерейти к поиску
Подкатегории
9000 , из 6 всего.D
Преобразование Денавита-Хартенберга (12 F)
F
Кинематические схемы свободного падения (26 F)
Медиа в категории “Кинематические диаграммы”
Следующие 138 файлов находятся в этой категории из 138 всего.
Одномерная кинематика.svg 445 × 470; 2 КБ
3 力のつりあい.svg 450 × 200; 29 КБ
4-х стержневое соединение анимационный.gif 719 × 503; 502 КБ
4-х стержневая связь.gif 830 × 588; 737 КБ
Ускорение как производная от скорости по траектории.svg 705 × 545; 4 КБ
Компоненты ускорения изменены.svg 512 × 269; 6 КБ
Компоненты ускорения.JPG 621 × 551; 28 КБ
Компоненты ускорения.svg 512 × 338; 14 КБ
Ускорение.JPG 705 × 545; 31 КБ
Akc sila tang norm.JPG 530 × 572; 22 КБ
Апрес.
JPG
359 × 123; 5 КБ Bahnkurve und Wegstrecke.svg 500 × 450; 29КБ
Bewegung gleichfoermig.png 1072 × 1450; 104 КБ
Блокглюф.png 225 × 374; 2 КБ
Брач робот antropomòrfic.svg 668 × 367; 43 КБ
Пришел простой принцип строительства chronogramme.svg 849 × 828; 38 КБ
Центробежная сила1.jpg 485 × 465; 19 КБ
Центробежная сила2.jpg 349 × 345; 12 КБ
Chronogramme canne soufflage bouteilles.svg 528 × 619; 26 КБ
Цикулярная гармоника.JPG 502 × 425; 13 КБ
Альтернативная версия конического маятника.svg 404 × 494; 12 КБ
Конический маятник.svg 404 × 494; 11 КБ
Кориолисова сила2.PNG 785 × 739; 147 КБ
Courbe vitesse вращения пинцет bacpro tu 2009.svg 589× 412; 199 КБ
Элемент схемы кривошипа.
svg
80×120; 2 КБ Цилиндрическая конфигурация.png 800 × 800; 15 КБ
Конфигурация Декарта.png 800 × 800; 24 КБ
Diagramme vitesses bacpro batmet 2005.svg 351 × 259; 11 КБ
Пример графика «расстояние-время».png 583 × 413; 30 КБ
Пример графика «расстояние-время».svg 524 × 372; 25 КБ
Доплеровский DME vector.gif 400 × 150; 5 КБ
Дуббелоплос.png 564 × 270; 6 КБ
Координаты Земли.PNG 566 × 547; 67 КБ
Энергия синетика 3.jpg 506 × 245; 22 КБ
Энергия синетика 4.jpg 365 × 180; 12 КБ
Энергия синетика 2.jpg 540 × 204; 20 КБ
EsempioFisica2.jpg 313 × 252; 9КБ
Freinage urgence bacpro horlogerie 2004.svg 301 × 69; 8 КБ
Трение.png 302 × 454; 8 КБ
FriccionDiagramaFuerzas.
png
529 × 416; 11 КБ Геометрическая интерпретация формулы постоянного ускорения.svg 360 × 360; 10 КБ
Geradlinige bewegung und Wegstrecke.svg 500 × 300; 25 КБ
Geschwindigkeit und konstanter Ruck.png 413 × 321; 4 КБ
Geschwindigkeit und momentane Beschleunigung.png 394 × 144; 2 КБ
Gleichf beschl Bewegung.png 600 × 300; 9 КБ
Gleichf beschl Bewegung.svg 859 × 283; 36 КБ
Графика MRUA.png 439 × 750; 23 КБ
Imgformulamuv4.jpg 100 × 100; 3 КБ
Обратная-кинематика-множественные-решения.svg 170×210; 8 КБ
Локальные единичные векторы bn.svg 910 × 622; 242 КБ
Местные единичные векторы.PNG 835 × 562; 96 КБ
Local unit vectors.svg 910 × 622; 242 КБ
Мальбен at.png 681 × 513; 15 КБ
Manivelle Bielle Piston Cinematique Exostatique.
svg
205 × 108; 12 КБ Manivelle Bielle поршень синематик гиперстатик.svg 205 × 108; 13 КБ
МетеорАкГраф.jpg 600 × 600; 70 КБ
MeteorVelocityGraph.jpg 600 × 600; 66 КБ
Световой конус Минковского lorentztransform.svg 588 × 601; 24 КБ
Modele echelle bacpro rocsm 2005.svg 310 × 312; 41 КБ
Moglfm2208 rodadura.jpg 513 × 210; 30 КБ
Момент инерции кольцевого пространства.svg 700 × 380; 7 КБ
Момент инерции толстого цилиндра h.png 133 × 162; 4 КБ
Момент инерции толстого цилиндра h.svg 185 × 210; 2 КБ
MotoTraslatorio-rotatorio.jpg 669 × 280; 41 КБ
Механизм RU2.jpg 548 × 175; 6 КБ
Движение круговое.jpg 330 × 330; 10 КБ
Движение гармоника.jpg 520 × 333; 20 КБ
Mvt circulaire uniforme.
JPG
578 × 567; 24 КБ Mvt circulaire.jpg 660 × 424; 24 КБ
Наблюдатель кружит над неподвижным объектом.PNG 955 × 510; 72 КБ
Parachutiste – диаграмма horaire de position si résistance de l’air quadratique.png 530 × 387; 36 КБ
Parachutiste – диаграмма horaire de vitesse si résistance de l’air quadratique.png 515 × 379; 31 КБ
Полный парашютный парашют – портрет фазы и сопротивления квадратному воздуху.png 427 × 322; 16 КБ
Parachutiste début de chute – портрет фазового сопротивления квадратного воздуха.png 427 × 322; 16 КБ
Parachutiste en chute libre – портрет фазы си сопротивления воздуха квадратного.png 427 × 322; 16 КБ
Planar-manipulator.svg 240 × 270; 44 КБ
Planar-three-link-manipulator.svg 210 × 230; 20 КБ
Точки зрения.PNG 1044 × 599; 184 КБ
Послинкис.
svg
375 × 375; 2 КБ Principe строительство пришло частично chronogramme.svg 610 × 396; 31 КБ
Движение снаряда баскетбол.svg 269 × 198; 26 КБ
Конфигурация PUMA.png 800 × 800; 22 КБ
Конфигурация SCARA.png 800 × 800; 17 КБ
Springdashpoint.jpg 961 × 690; 213 КБ
Стационарный объект во вращающейся рамке.PNG 1210 × 1092; 187 КБ
Strecke und konstante Beschleunigung.png 403 × 311; 4 КБ
Стрекке и моменте Geschwindigkeit.png 379 × 273; 22 КБ
Текенинг вектор snelheid.png 233 × 239; 4 КБ
ТироПараболико.jpg 265 × 272; 27 КБ
Torseur cinématique d’un mouvement helicoidal.png 1123 × 794; 55 КБ
Трактор.png 288 × 220; 19 КБ
Траектория для трех углов пуска.PNG 586 × 363; 58 КБ
ТРАСЛАЦИОН 1.
jpg
139 × 261; 12 КБ ТРАСЛАЦИОН 2.jpg 404 × 304; 16 КБ
ТРАСЛАЧОН 3.jpg 513 × 307; 30 КБ
Две тележки.png 1106 × 299; 92 КБ
Два опорных кадра.PNG 725 × 435; 27 КБ
Несбалансированный вращающийся вал.PNG 408 × 604; 29 КБ
Вектор snelheid-Plain.svg 234 × 227; 12 КБ
Velocidad радиальный.PNG 539 × 539; 23 КБ
Velocitats Roda.svg 647 × 413; 8 КБ
Определение скорости.svg 294 × 140; 12 КБ
Графики вертикального движения снаряда.jpg 1450 × 1029; 172 КБ
Графики вертикального движения снаряда.svg 484 × 359; 252 КБ
Verwysingsraamwerke 01 с teks.png 748 × 352; 6 КБ
Витесс де район.png 486 × 486; 49 КБ
Water-rocket-altitude-graph.svg 450 × 320; 43 КБ
Ватт-параллельное-движение.
svg
512 × 428; 1 КБ Weg-Zeit-Diagramm.png 331 × 331; 25 КБ
Wegelement.png 165 × 227; 8 КБ
Геометрия колеса.svg 701 × 434; 26 КБ
Работа (физика).svg 600 × 300; 17 КБ
Скорость небесного тела.gif 400 × 400; 1,23 МБ
おもりの引き上げ.svg 300 × 400; 31 КБ
アトウッドの器械.svg 400 × 450; 36 КБ
力学的エネルギー 物体の最高点.svg 250 × 200; 13 КБ
力学的エネルギー 鉛直落下.svg 460 × 470; 36 КБ
動摩擦と力学的エネルギー.svg 900 × 600; 47 КБ
台車実験a-mグラフ.svg 439 × 352; 26 КБ
山頂と海面の気圧.svg 749 × 362; 45 КБ
平均の速度.svg 628 × 568; 34 КБ
平均速度と瞬間速度.svg 747 × 566; 46 КБ
引く力と動摩擦.svg 481 × 304; 43 КБ
引っ張る動摩擦.svg 574 × 250; 41 КБ
振り子の力学的エネルギー.