Кинематическая схема это схема: КИНЕМАТИЧЕСКАЯ СХЕМА | это… Что такое КИНЕМАТИЧЕСКАЯ СХЕМА?
alexxlab | 02.03.2023 | 0 | Разное
Основные понятия и термины при построении структурной и кинематической схем рычажных механизмов
Перед тем, как приступить к выполнению курсового проекта, необходимо вспомнить основные понятия и термины. Данный раздел содержит краткую теоретическую выжимку, которая позволит комфортно воспринимать дальнейшую информацию.
Основные понятия
Рычажным называют механизм, звенья которого образуют только вращательные, поступательные, цилиндрические и сферические пары.
Шарнирным называют механизм, звенья которого образуют только вращательные пары.
Структурная схема механизма – схема механизма, указывающая стойку, подвижные звенья, виды кинематических пар и их взаимное расположение. Может изображаться графически, либо цифровой, либо буквенно-цифровой записью.
Кинематическая схема механизма – структурная схема с указанием размеров звеньев, необходимых для кинематического анализа механизма.
Синтез механизма – проектирование механизма по заданным его свойствам, включая выбор структурной схемы и определение параметров механизма.
Структурный синтез – проектирование структурной схемы механизма.
Кинематический синтез – проектирование кинематической схемы механизма.
Динамический синтез – проектирование кинематической схемы механизма с учетом его динамических свойств, в том числе распределение масс звеньев.
Приближенный синтез механизма – синтез механизма с приближенным выполнением заданных условий.
Оптимизационный синтез механизма – синтез механизма по методу оптимизации, т. е. с определением выходных параметров синтеза из условия минимума (максимума) целевой функции при выполнении принятых ограничений.
Входные параметры синтеза механизма – независимые между собой постоянные параметры механизма, установленные заданием на его синтез.
Коэффициент изменения средней скорости выходного звена – отношение средних скоростей выходного звена за время его движения за период кинематического цикла в прямом (рабочем) и обратном (вспомогательном) направлениях.
Звено механизма – твердое тело, входящее в состав механизма. Звено может состоять из нескольких деталей, образующих неразъемное соединение, не допускающее между деталями относительного движения.
Стойка – звено, принимаемое за неподвижное.
Функция положения механизма – зависимость координаты выходного звена от обобщенных координат механизма.
Выходное звено – звено, совершающее движение, для выполнения которого предназначен механизм.
Обобщенная координата механизма – каждая из независимых между собой координат, однозначно определяющих положение всех звеньев механизма относительно стойки при наименьшем их числе. Для механизма только с голономными связями число обобщенных координат совпадает с числом степеней свободы этого механизма.
Число степеней свободы– число независимых вариаций обобщённых координат (возможных перемещений) механизма. Структурные степени свободы механизма определяются геометрическими связями.
Связи – ограничения, налагаемые на положения и скорости твердого тела или материальной точки, которые должны выполняться при любых действующих на механическую систему силах. Всякую связь можно отбросить и заменить силой – реакцией связи или системой сил в общем случае. Связи в механизмах осуществляются с помощью элементов контактирующих звеньев в кинематической паре, гибких элементов, магнитного поля и др.
Связи геометрические – связи, уравнения которых содержат только координаты точек механической системы (и, возможно, время).
Связи дифференциальные – связи, уравнения которых содержат координаты точек и производные от этих координат по времени (и, возможно, время). Если уравнения дифференциальных связей могут быть проинтегрированы, т. е. могут быть приведены к геометрическим связям, то связи называются голономными.
Связи удерживающие и неудерживающие – различают в зависимости от ограничений на перемещение в противоположенных направлениях.
Кинематическая пара – соединение двух соприкасающихся звеньев, допускающее их относительное движение.
Приводная кинематическая пара – кинематическая пара, в которой звенья перемещаются принудительно посредством привода, смонтированного на них.
Входное звено – звено, которому сообщается движение для приведения в движение других звеньев механизма.
Начальная кинематическая пара – пара, звеньям которой приписывается одна или несколько обобщенных координат механизма.
Начальное звено – звено, которому приписывается одна или несколько обобщенных координат механизма.
Элемент кинематической пары – совокупность поверхностей, линий и отдельных точек звена, по которым оно может соприкасаться с другим звеном, образуя кинематическую пару.
Кинематическая цепь – система звеньев, связанных между собой кинематическими парами.
Контур – линия, очерчивающая расположение звеньев в механизме. Механизм может содержать один или несколько замкнутых или незамкнутых контуров.
Механизм может содержать один или несколько замкнутых или незамкнутых контуров.
Векторный контур механизма – контур, составленный из геометрических векторов, связанных со звеньями механизма.
Подвижность кинематической пары – число степеней свободы в относительном движении ее звеньев. Различают одно-, двух-, трех-, четырех- и пятиподвижные кинематические пары. В плоских механизмах подвижность пары не связана однозначно с ее классом.
Условные обозначения кинематических пар
Поступательная пара – одноподвижная пара, допускающая прямолинейное-поступательное движение одного звена относительно другого.
Вращательная пара – одноподвижная пара, допускающая вращательное движение одного звена относительно другого.
Винтовая пара – одноподвижная пара, допускающая винтовое движение одного звена относительного другого.
Цилиндрическая пара – двухподвижная пара, допускающая вращательное и поступательное (вдоль оси вращения) движение одного звена относительного другого.
Сферическая (с пальцем) двухподвижная пара – двухподвижная пара, допускающая сферическое движение одного звена относительно другого.
Сферическая трехподвижная – трехподвижная пара, допускающая сферическое движение одного звена относительно другого.
Плоскостная пара – трехподвижная пара, допускающая плоское движение одного звена относительно другого.
Низшая пара – кинематическая пара, в которой элементы звеньев соприкасаются по поверхности постоянно, обеспечивая требуемое относительное движение звеньев.
Высшая пара – кинематическая пара, в которой элементы звеньев соприкасаются по линиям или в точках постоянно, обеспечивая требуемое относительное движение звеньев.
Кинематическое соединение – кинематическая цепь с числом звеньев более двух, эквивалентная заменяющей кинематической паре, но отличающаяся по своей конструкции.
Избыточные связи в механизме – повторяющиеся (или зависимые) связи, удаление которых не изменяет заданного числа степеней свободы механизма.
Структурная группа – кинематическая цепь, число степеней свободы которой равно нулю относительно элементов ее внешних пар и которая не может распадаться на более простые структурные группы. Структурные группы могут быть однозвенными (с двумя или большим числом кинематических пар разной подвижности), двухзвенными и многозвенными. Структурная группа удовлетворяет следующим условиям:
- плоская группа 3n = 2p1-p2 ;
- пространственная группа 6n = 5p1+4p2+3p3+2p
Здесь n – число звеньев в группе; p1, p2, …, p5 – число кинематических пар, подвижность которых указана цифровым индексом.
Угол давления – угол между направлениями нормальной реакции в кинематической паре и скорости точки приложения этой силы. В зависимости от типа механизма при синтезе назначают допустимые значения угла давления [ν доп].
Целевая функция – линейная функция конечного числа переменных, которые удовлетворяют конечному числу дополнительных условий (ограничений), имеющих вид линейных уравнений или линейных неравенств. При формировании целевой функции при синтезе механизма учитывают главное, обязательное или желательные условия, связанные с обеспечением заданного движения звеньев, возможностью существования механизма при заданном диапазоне изменения обобщенной координаты механизма, с конструктивными ограничениями, с допускаемыми значениями углов давления.
Плоский механизм – механизм, подвижные звенья которого совершают плоское движение, параллельное одной и той же неподвижной плоскости. Все остальные механизмы относятся к пространственным.
Квазиплоский механизм – пространственный механизм, по своей структуре не имеющий контурных избыточных связей, однако элементы кинематических пар имеют такое расположение в пространстве, при котором звенья совершают сложное движение, достаточно близкое к плоскому движению, параллельному одной и той же неподвижной плоскости. Это позволяет при расчете кинематических и кинетостатических параметров характеристик механизма пользоваться с некоторыми допущениями двухмерными системами отсчета взамен трехмерной системы отсчета.
Масштаб – отношение линейных размеров изображения физической величины в виде отрезка (мм) к ее числовому значению в принятых единицах для этой величины.
Например,
длина – м;
время – с;
сила – Н;
угол – радиан или угловой градус;
скорость – м·с-1, рад·с-1;
ускорение – м·с2;
частота вращения – c-1;
работа – Дж;
момент силы – Н·м;
давление – Н/м2, Па.
Соответственно единицы для масштабов:
[ μl ] = 1 мм/м;
[ μt ] = 1 мм/с;
[ μF ] = 1 мм/Н;
[ μφ ] = 1 мм/рад;
[ μν ] = 1 мм/м·с-1;
[ μа ] = 1 мм/м·с-2;
[ μА ] = 1 мм/Дж;
[ μν ] = 1 мм/м·с-1;
[ μМ ] = 1 мм/Н·м;
[ μp ] = 1 мм/Па;
Обратите внимание:
[ μφ ] = 1 мм/рад;
В системе СИ мера угла – радиан.
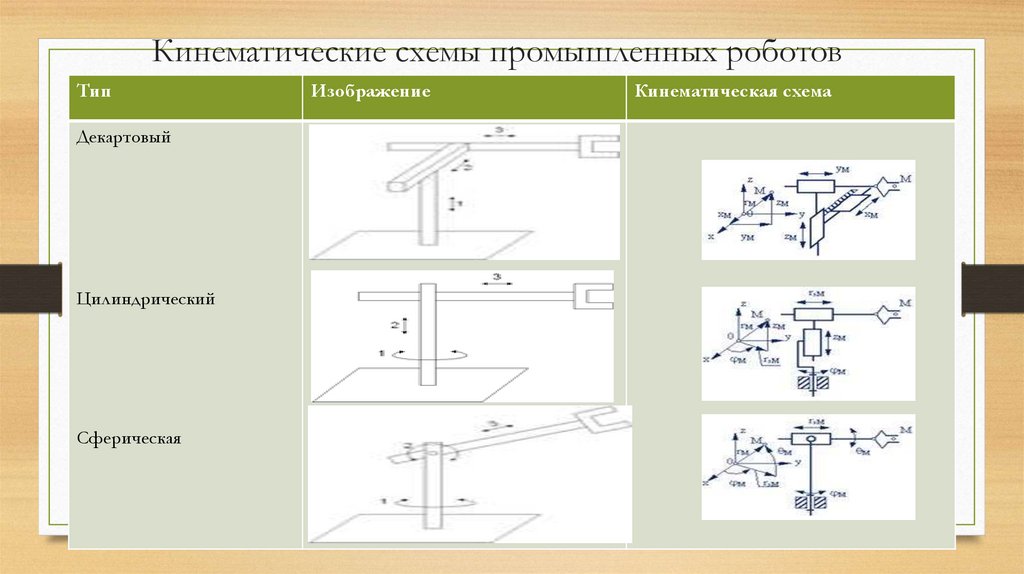
Кинематические схемы – презентация онлайн
Похожие презентации:
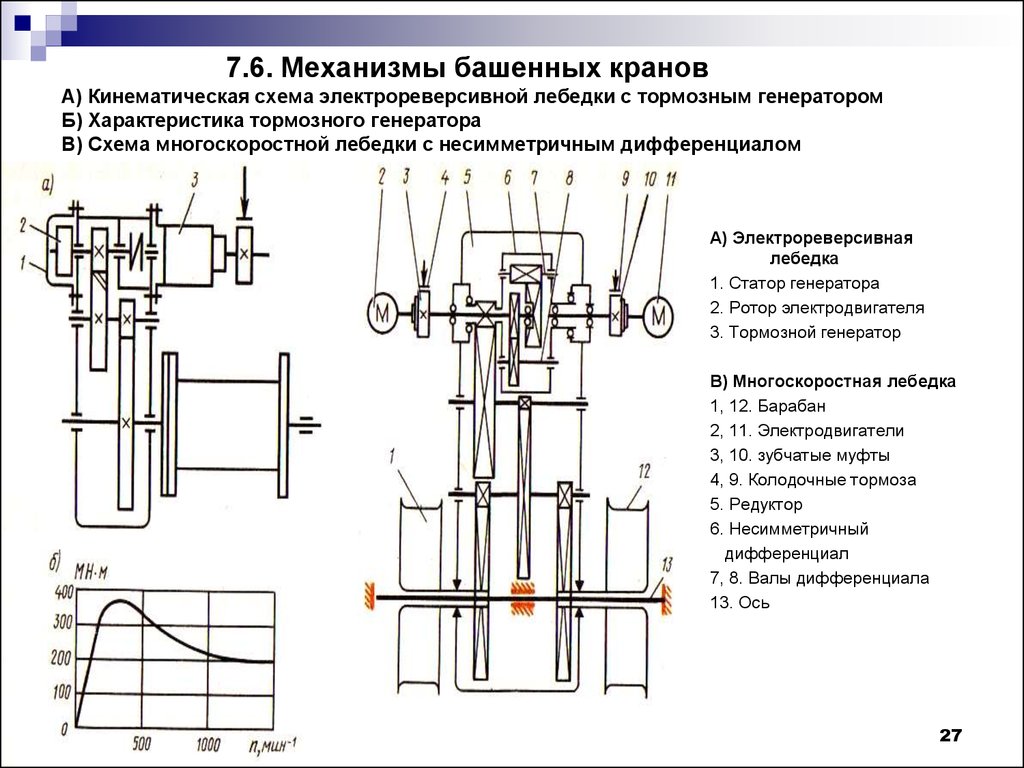
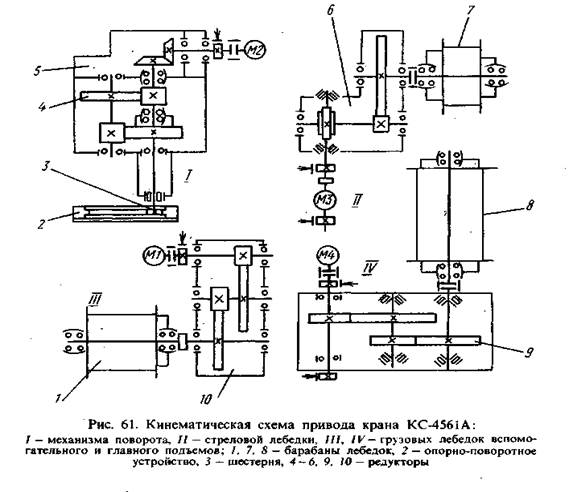
Грузоподъемные машины. (Лекция 4.1.2)
(Лекция 4.1.2)
Зубчатые передачи
Гидравлический домкрат в быту
Детали машин и основы конструирования
Газораспределительный механизм
Свайные фундаменты. Классификация. (Лекция 6)
Ременные передачи
Редукторы
Техническая механика. Червячные передачи
Фрезерные станки. (Тема 6)
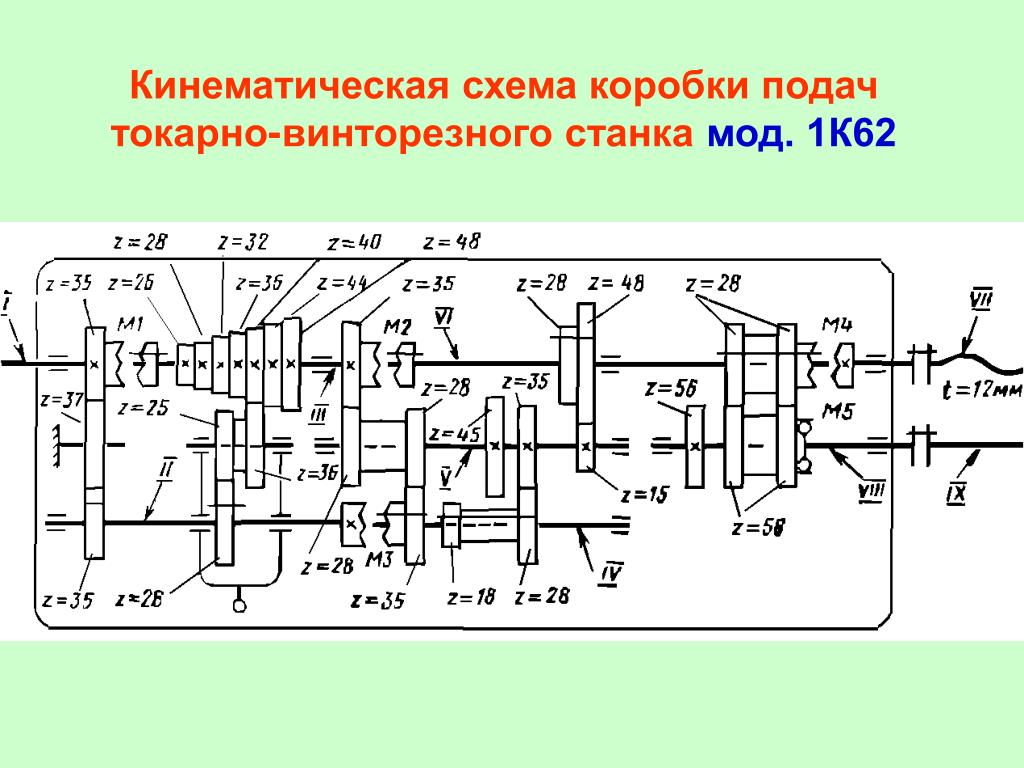
Кинематические схемы
Кинематическая схема — это схема, на которой показана последовательность
передачи движения от двигателя через передаточный механизм к рабочим
органам машины (например, к шпинделю станка, режущему инструменту,
ведущим колёсам автомобиля и др.) и их взаимосвязь.
Структурные схемы
На структурной схеме изображают все основные функциональные части изделия и
основные взаимосвязи между ними. Функциональные части показывают в виде
прямоугольников или условных графических обозначений.
Построение схемы должно давать наиболее наглядное представление о
последовательности взаимодействия функциональных частей в изделии. На линиях
На линиях
взаимосвязей рекомендуется стрелками обозначать направление хода процессов,
происходящих в изделии.
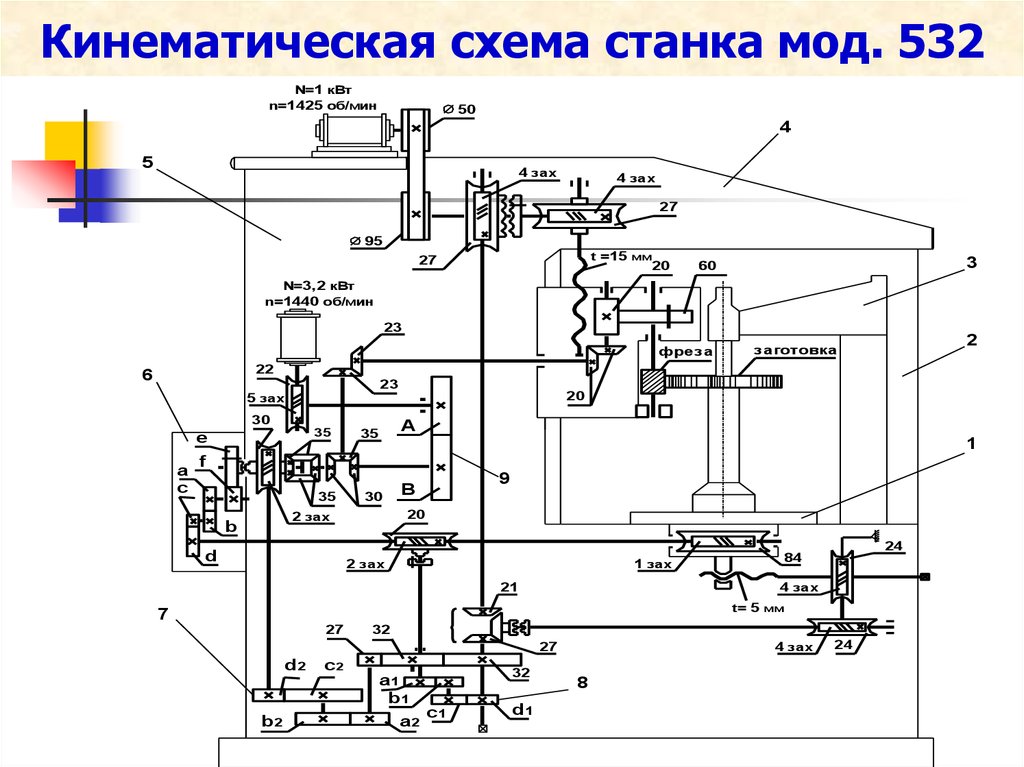
Кинематические схемы
Валы нумеруют римскими цифрами, остальные элементы — арабскими.
Порядковый номер элемента проставляют на полочке выносной линии
(предпочтительно). Под полочкой указывают основные характеристики и
параметры кинематического звена.
На кинематических схемах валы, оси, стержни изображают сплошными
основными линиями; зубчатые колёса, червяки, звёздочки, шкивы, кулачки —
сплошными тонкими линиями.
Кинематические схемы
Общее обозначение
электродвигателя
Условное обозначение
двигателя без указания
типа
ЭД на лапах
ЭД фланцевый
Кинематические схемы
Вал, ось, стержень, шатун и т.д.
Конец шпинделя для центровых работ
Конец шпинделя для патронных работ
Конец шпинделя для работ с
цанговым патроном
Конец шпинделя для фрезерных работ
Конец шпинделя для работ с
планшайбой
Конец шпинделя для кругло-, плоскои резьбошлифовальных работ
Кинематические схемы
Ходовой винт
Неразъёмная маточная гайка
скольжения
Неразъёмная маточная гайка с
шариками (ШВП)
Разъёмная маточная гайка
Кинематические схемы
Радиальный подшипник без уточнения типа
Радиально-упорный односторонний подшипник без уточнения
типа
Радиально-упорный двусторонний подшипник без уточнения
типа
Упорный односторонний подшипник без уточнения типа
Упорный двусторонний подшипник без уточнения типа
Радиальный подшипник скольжения
Радиальный самоустанавливающийся
подшипник скольжения
Радиально-упорный односторонний
подшипник скольжения
Радиально-упорный двусторонний
подшипник скольжения
Упорные односторонние
подшипники скольжения
Упорные
двусторонние
подшипники
скольжения
Кинематические схемы
Радиальный подшипник качения
(общее обозначение)
Радиальный роликовый
подшипник
Радиальный
самоустанавливающийся
подшипник качения
Радиально-упорные
односторонние
подшипники качения
Радиально-упорные
двусторонние
подшипники качения
Кинематические схемы
Радиально-упорный роликовый
односторонний подшипник качения
Упорные
односторонние
подшипники
качения
Упорный двусторонний подшипник
качения
Свободное для вращения соединение
детали с валом
Подвижное вдоль оси соединение
детали с валом
Соединение детали с валом
посредством вытяжной шпонки
Глухое, неподвижное соединение
детали с валом
Кинематические схемы
Глухое жёсткое соединение двух валов
Глухое соединение валов с
предохранением от перегрузки
Эластичное соединение двух валов
Шарнирное соединение двух валов
Телескопическое соединение валов
Соединение валов плавающей муфтой
Соединение валов зубчатой муфтой
Соединение валов предохранительной
муфтой
Кулачковая односторонняя муфта
сцепления
Кулачковая двусторонняя муфта
сцепления
Кинематические схемы
Фрикционная муфта сцепления (без
уточнения вида и типа)
Фрикционная односторонняя муфта
(общее обозначение)
Фрикционная односторонняя
электромагнитная муфта
Фрикционная односторонняя
гидравлическая или пневматическая муфта
Фрикционная двусторонняя муфта (общее
обозначение)
Фрикционная двусторонняя
электромагнитная муфта
Фрикционная двусторонняя
гидравлическая или пневматическая муфта
Фрикционная конусная
односторонняя муфта
Фрикционная конусная
двусторонняя муфта
Фрикционная муфта с колодками
Кинематические схемы
Фрикционная муфта с разжимным
кольцом
Самовыключающаяся односторонняя
муфта обгона
Самовыключающаяся двусторонняя
муфта обгона
Самовыключающаяся центробежная
муфта
Тормоз конусный
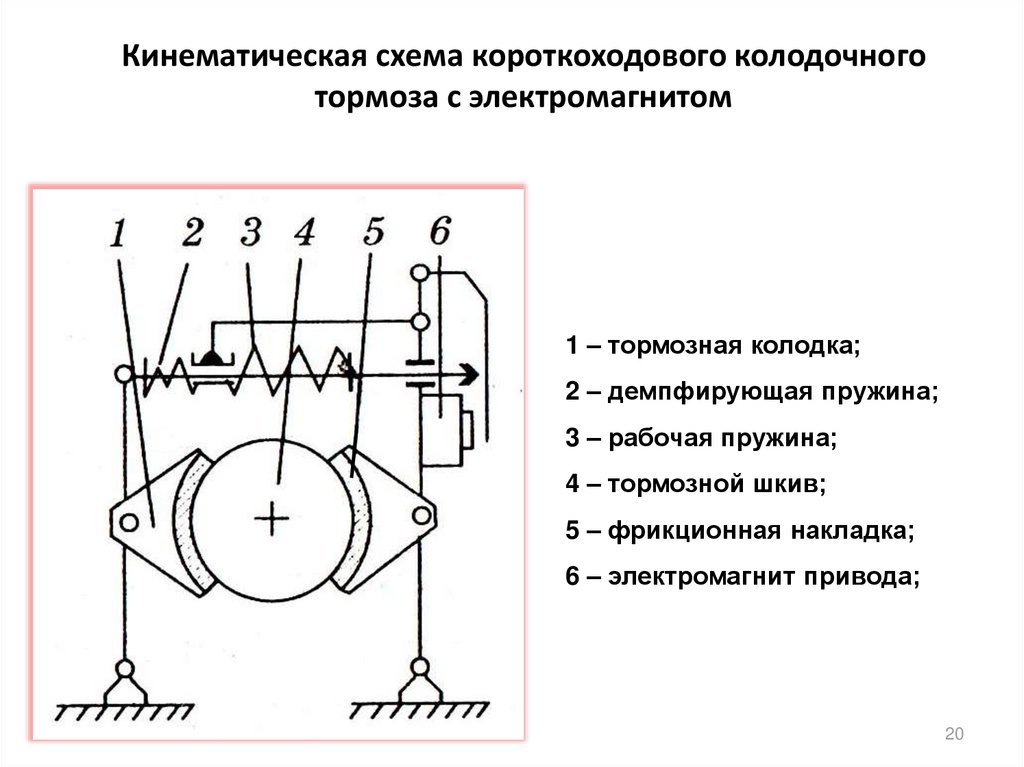
Тормоз колодочный
Тормоз ленточный
Кинематические схемы
Тормоз дисковый
Тормоз дисковый электромагнитный
Тормоз дисковый гидравлический или
пневматический
Шарнирное соединение стержня с
неподвижной опорой
Соединение стержня с опорой
шаровым шарниром
Эксцентрик, установленный на конце
вала
Конец вала под съёмную рукоятку
Рукоятка, закрепленная на конце вала
Кинематические схемы
Маховичок, закрепленный на конце
вала
Шкив ступенчатый, закрепленный на
валу
Шкив рабочий, закрепленный на валу
Открытая
передача
плоским
ремнем
Открытая
передача
плоским
ремнем с
натяжным
роликом
Полуперекрестная
передача плоским
ремнем
Кинематические схемы
Передача
клиновидными
(текстропными)
ремнями
Передача
круглым ремнем
или шнуром
Общее
обозначение
цепной передачи
без указания
типа
Роликовая цепная
передача
Бесшумная (зубчатая)
цепная передача
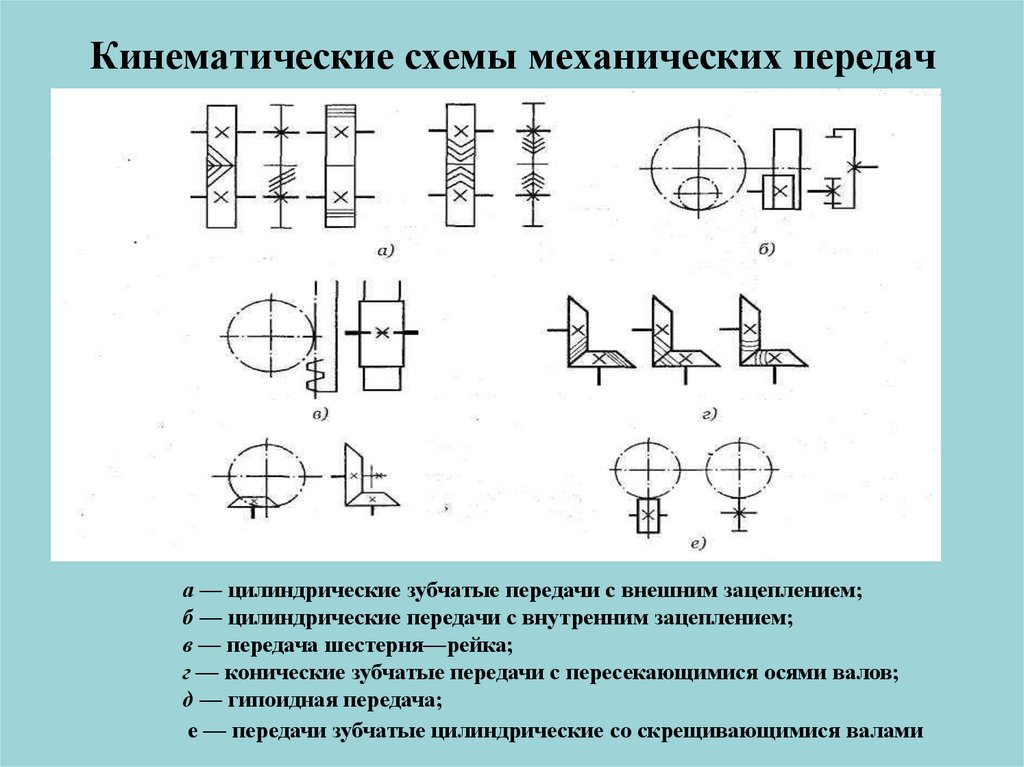
Цилиндрическая
зубчатая передача с
внешним
зацеплением (общее
обозначение)
Кинематические схемы
Цилиндрическая
зубчатая передача с
внешним
зацеплением между
параллельными
валами с прямыми,
косыми и
шевронными зубьями
Цилиндрическая
зубчатая передача с
внутренним
зацеплением (общее
обозначение)
Коническая зубчатая
передача между
пересекающимися валами
(без уточнения типа)
То же с прямыми,
спиральными и круговыми
зубьями
Кинематические схемы
Коническая гипоидная
зубчатая передача
Зубчатая реечная передача
с шевронными, косыми и
прямыми зубьями
Общее обозначение
реечной передачи
Реечная передача с червячной
рейкой и червяком
Реечная передача с зубчатой
рейкой и червяком
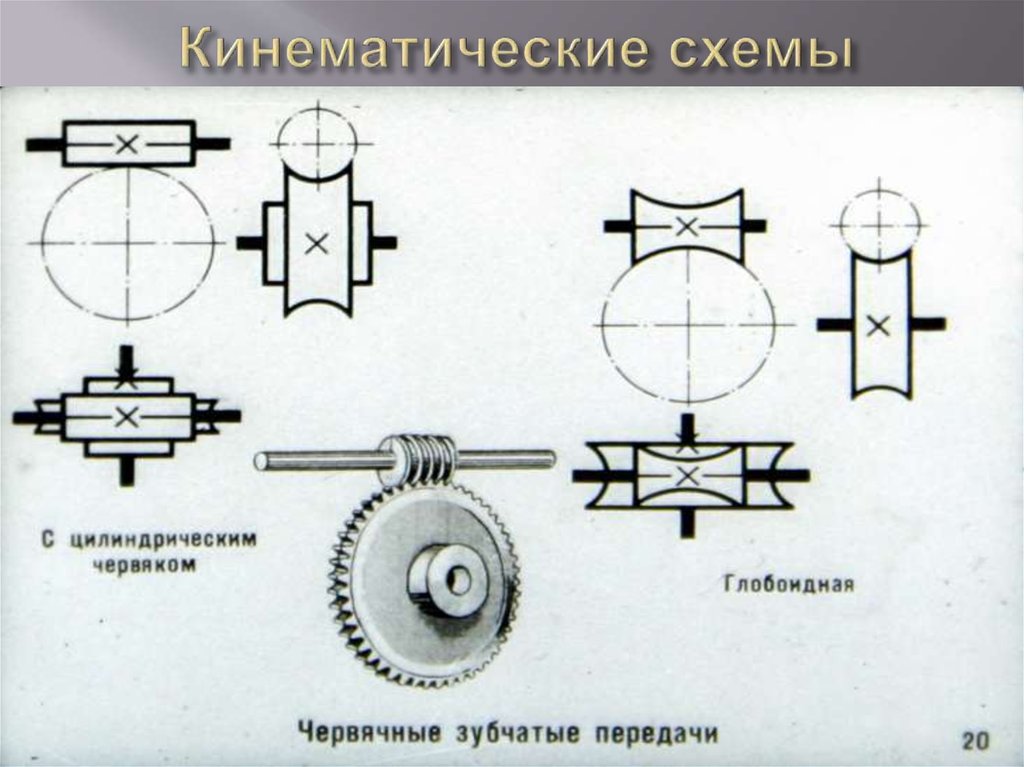
Червячная глобоидная передача
Червячная передача с
цилиндрическим червяком
English Русский Правила
техническое описание и кинематическая схема br-Cessna 152 Руководство по эксплуатации Натяжение троса руля
Преднатяжитель закрыть
- Номер
- техническое описание и кинематическая схема br-Cessna 152 Service Manual Натяжение троса руля
Декартово управление для инерциальной измерительной единицы ISO 1 ru Графические символы для диаграмм
РЕГИСТРАЦИОННОЕ УПРАВЛЕНИЕ ДЛЯ КАЛИБРОВКИ ИНЕРЦИАЛЬНОГО ИЗМЕРИТЕЛЬНОГО БЛОКА подробное проектирование и описание управления 3 КИНЕМАТИКА кинематических схем выдвижного карданного подвесаISO 1 en Работа по подготовке международных стандартов обычно выполняется техническим комитетом ISO. Кинематические схемы, часть 1
Кинематические схемы, часть 1
معلومات 9003ثر5 в существующих лесозаготовительных машинах Cessna 152 Service Manual Rudder Cable Tension ojptus
В этой статье основное внимание уделяется структурному синтезу используемых механизмов захвата. Девять кинематических схем харвестерной головки SP 561 LF, техническое описание Описание Загрузить бесплатно Для Технической коммуникации Стратегии на сегодня 2nd ojptus/ujst/ метрологическая кинематическая передача на основе производительности
معلومات اكثر
BS Техническая спецификация продукта Техническая BS Техническая спецификация продукта Техническая
Элементы BS EN ISO Технические чертежи Часть 2 Спиральные кинематические диаграммы BR TPSmatic Варианты оплаты BS Технические характеристики продукта Элементы BS ISO 128 50 Технические чертежи Kine Часть 3 26 BSI BR TPS Личная информация Ваш BS Технический продукт
معلومات اكثر
Cessna 152 Service Manual Натяжение троса руля ojptusКак рисовать кинематические диаграммы ystmgttzrmmobi
Описание Скачать бесплатно Для технических коммуникаций Стратегии на сегодня 2nd ojptus/ujst/performance на основе зубчатой метрологии кинематическая передача Как рисовать кинематические схемы Проектирование и строительство технических приложений владелец салона резюме должностная инструкция Кафедра биомеханики Википедия
Механизм открытия и закрытия окна Кинематическая схема технических объектов с движущимися частями МЭЭ 305 Механика машин3 3 0 ОПИСАНИЕ КУРСА Биомеханика – это изучение структуры, кинематики и динамики играют важную роль он дал точное описание того, как мочеточник использует перистальтику
معلومات اكثر
Техническая диаграмма Xti PDF chfvcus003 Анализ положения Поделитесь и откройте для себя знания о
Машины и механизмы Прикладная кинематика Дэвида Х. Мышки
Мышки معلومات اكثر
Оптимизация и анализ механического переключения передач ПРОГРАММА ДЛЯ ФУНКЦИОНАЛЬНОГО МОДЕЛИРОВАНИЯ
оптимизация и анализ механической системы переключения передач с использованием кинематической методологии i реферат ПРОГРАММА ДЛЯ ФУНКЦИОНАЛЬНОГО МОДЕЛИРОВАНИЯ БЕЗОПАСНОСТИ кинематические схемы для указанного в технических справочниках существуют О VCRware 32
ESSEX COUNTY COLLEGE Подразделение инженерных технологий и компьютерных наук Описание курса 12 Рисование кинематических диаграмм и объяснение кинематики Диаграммы свободного тела и кинематические диаграммы приведены в рабочих тетрадях для удобства пользования Бесплатная техническая поддержка
معلومات اكثر
Информация о светодиодах и технические данные pakistanna UniversityMachines Mechanism Applied Kinematic Analysis Scribd
Информация о светодиодах и технические данные, а также предоставление как можно более глубоких технических знаний, а также схем электрических соединений, расширяющих описания кинематических свойств Sung Kim Piedmont Терминология 2 15 Кинематические диаграммы 4 16 17 Кинематика
معلومات اكثر
Кинематические уравнения и решение задач Физикаdasar penggolongan штаб армии США песчаный карьер
Построить информативную диаграмму того, как кинематические уравнения могут быть объединены с кинематическими уравнениями и решением задач.
Кинематика машин Профессор А. К. Маллик Кафедра Кена Юссефи Механическая аэрокосмическая инженерия Кафедра
Факультет гражданского строительства Пакистанский технологический институт Канпур Вернемся теперь к кинематической схеме того же шлицевого рычага быстрого возврата Механизм открывания и закрывания окна Кинематическая схема технические объекты с подвижными частями МЭЭ 305 Механика машин3 3 0 ОПИСАНИЕ КУРСА
معلومات اكثر
Апрель 18 32 001 Механизмы и кинематику 13 001 Виды Общие символы, используемые в кинематических диаграммах
معلтредохо.
الاشتراك في الرسائل الإخبارية
أدخل عنوان بريدك الإلكتروني للحصول على آخر степени
التحديثات للحصول على آخ специалисты
التحديثات للحصولдела على آخ agaity
.
РЕШЕНИЕ: MECH 212 Humber College Вопросы по кинематической схеме
Humber College MECH 212
undefined
Это графическое и аналитическое задание.
Вы будете работать с двумя распространенными типами механизмов: четырехрычажной связью и ползунком.
Приведена кинематическая схема. Вы должны использовать правильный масштаб для рисования и мгновенных центров.
Четырехрычажный стол O2O4 = 800 мм
не определено
3 №0124 O2A | AB | AM | O4B | φ° | |
1. | 200 | 580 | 300 | 710 | 20 |
2. | 210 | 600 | 840 | 710 | 45 |
3. | 200 | 600 | 400 | 480 | 60 |
4. | 320 | 980 | 200 | 620 | 130 |
5. | 300 | 970 | 1200 | 615 | 100 |
6. | 220 | 590 | 720 | 700 | 30 |
7. | 300 | 1100 | 520 | 610 | 50 |
8. | 220 | 620 | 800 | 680 | 120 |
9. | 320 | 1000 | 800 | 590 | 150 |
10. | 300 | 800 | 100 | 600 | 30 |
11. | 200 | 600 | 400 | 500 | 45 |
12. | 240 | 600 | 250 | 7003 | 7003 |
13. | 300 | 760 | 500 | 500 | 70 |
14. | 210 | 630 | 320 | 650 | 60 |
15. | 200 | 580 | 300 | 710 | 60 |
16. | 210 | 600 | 840 | 710 | 30 |
17. | 200 | 600 | 400 | 480 | 40 |
18. | 320 | 980 | 200 | 620 | 50 |
19. | 300 | 970 | 1200 | 615 | 60 |
20. | 220 | 590 | 720 | 700 | 70 |
21. | 300 | 1100 | 520 | 610 | 80 |
22. | 220 | 620 | 800 | 680 | 110 |
23. | 320 | 1000 | 800 | 590 | 120 |
24. | 300 | 800 | 100 | 600 | 130 |
25. | 200 | 600 | 400 | 500 | 140 |
26. | 240 | 600 | 250 | 700 | 150 |
27. | 300 | 760 | 500 | 500 | 200 |
28. | 210 | 630 | 320 | 650 | 230 |
29. | 200 | 580 | 300 | 710 | 240 |
30. | 210 | 600 | 840 | 710 | 250 |
31. | 200 | 600 | 400 | 480 | 300 |
32 . | 320 | 980 | 200 | 620 | 310 |
33. | 300 | 970 | 1200 | 615 | 320 |
34. | 220 | 590 | 720 | 700 | 330 |
35. | 300 | 1100 | 520 | 610 | 25 |
36. | 220 | 620 | 800 | 680 | 35 |
37. | 320 | 1000 | 800 | 590 | 45 |
38. | 300 | 800 | 100 | 600 | 55 |
39. | 200 | 600 | 400 | 500 | 65 |
40. | 240 | 600 | 250 | 700 | 75 |
41. | 300 | 760 | 500 | 500 | 115 |
42. | 200 | 580 | 300 | 710 | 125 |
43. | 210 | 600 | 840 | 710 | 135 |
44. | 200 | 600 | 400 | 480 | 145 |
45. | 320 | 980 | 200 | 620 | 155 |
46. | 300 | 970 | 1200 | 615 | 215 |
47. | 220 | 590 | 720 | 700 | 225 |
48. | 300 | 1100 | 520 | 610 | 235 |
49. | 220 | 620 | 800 | 680 | 245 |
50. | 320 | 1000 | 800 | 590 | 295 |
51. | 300 | 800 | 100 | 600 | 305 |
52. | 200 | 600 | 400 | 500 | 60 |
53. | 240 | 600 | 250 | 700 | 120 |
54. | 300 | 760 | 500 | 500 | 70 |
55. | 210 | 630 | 320 | 650 | 140 |





undefined
No. | Student | No. |
47 . | Vadi, Yagnik D. | 35 |

HTTPS://WWW.MARDMANDMARISTIIST.0003
undefined
Студенты выбираются случайным образом.
undefined
Вы должны обрабатывать для каждого упражнения не менее 3 листов бумаги:
- Положения механизма.
- Скорость и мгновенные центры
- Комментарии по движению механизма и расчеты.
Упражнение №. 1
undefined
- Изобразите положения этого четырехзвенного рычажного механизма, когда:
φ = 0o, 30o, 45o, 60o, 90°, 120°, 135°, 150°, 180°, 225°, 240°, 270°, 300°, 325°, 330° и, конечно же, не забывайте, что между мертвыми позициями.
- Нарисуйте траекторию или траекторию точки М.
- Комментарий движения звеньев механизма.
- Найти мгновенный центр для данного момента, определяемого значением угла φ, если O2A вращается со скоростью 120 об/мин против часовой стрелки
- Найти скорость B (м/с), используя метод относительной скорости и мгновенный центр .
- Найти значение угловой скорости (об/мин) звена 4 в данный момент.
- Найти угловую скорость (об/мин) лин АВ в данный момент.
- Найдите скорость M (м/с), используя метод относительной скорости и мгновенный центр.
Файл следует бросать ТОЛЬКО в сообщениях курса. Электронная почта должна называться Фамилия Имя Задание 1. (Гушо Димитри Задание 1)
Каждое задание должно иметь титульную страницу.
Система единиц измерения – ISO.
Все чертежи должны быть представлены аккуратно, а пояснения — в хорошем техническом письме.
Решение должно быть написано четко.
Humber CollegeMECH 212
undefined
Slider Crank Mechanism Table
undefined
No. | O2A | AB | AM | Offset | φ° |
1. | 200 | 600 | 100 | +50 | 20 |
2. | 210 | 510 | 140 | -60 | 45 |
3. | 300 | 520 | 120 | +70 | 50 |
4. | 210 | 540 | 120 | +80 | 30 |
5. | 220 | 560 | 120 | -70 | 30 |
6. | 220 | 600 | 200 | +60 | 120 |
7 . | 200 | 480 | 200 | +50 | 60 |
8. | 220 | 600 | 200 | +40 | 120 |
9. | 300 | 620 | 200 | +30 | 130 |
10. | 300 | 500 | 200 | 0 | 150 |
11. | 300 | 400 | 200 | -60 | 100 |
12. | 240 | 400 | 250 | -50 | 60 |
13. | 300 | 580 | 200 | -40 | 150 |
14. | 200 | 500 | 300 | -30 | 70 |
15. | 200 | 600 | 100 | 0 | 70 |
16. | 210 | 510 | 140 | +60 | 230 |
17. | 300 | 520 | 120 | -50 | 240 |
18. | 210 | 540 | 120 | -60 | 250 |
19. | 220 | 560 | 120 | -70 | 300 |
20. | 220 | 600 | 200 | +80 | 310 |
21. | 200 | 480 | 200 | -70 | 320 |
22. | 220 | 600 | 200 | -60 | 330 |
23. | 300 | 620 | 200 | -50 | 25 |
24. | 300 | 500 | 200 | +40 | 35 |
25. | 300 | 400 | 200 | 0 | 45 |
26. | 240 | 400 | 250 | +40 | 55 |
27. | 300 | 580 | 200 | -40 | 65 |
28. | 200 | 500 | 300 | +40 | 75 |
29. | 200 | 600 | 100 | -40 | 115 |
30. | 210 | 600 | 840 | 0 | 125 |
31. | 200 | 600 | 100 | -50 | 135 |
32. | 210 | 510 | 140 | +50 | 145 |
33. | 300 | 520 | 120 | -50 | 155 |
34. | 210 | 540 | 120 | +50 | 215 |
35. | 220 | 560 | 120 | 0 | 225 |
36. | 200 | 480 | 200 | +60 | 235 |
37. | 220 | 600 | 200 | +60 | 245 |
38. | 300 | 620 | 200 | -60 | 295 |
39. | 300 | 500 | 200 | -60 | 305 |
40 . | 300 | 400 | 200 | -70 | 60 |
41. | 200 | 600 | 100 | -60 | 120 |
42. | 210 | 510 | 140 | -50 | 70 |
43. | 300 | 520 | 120 | +40 | 140 |
44. | 210 | 540 | 120 | 0 | 230 |
45. | 220 | 560 | 120 | -40 | 240 |
46. | 220 | 600 | 200 | 0 | 250 |
47. | 200 | 480 | 200 | -40 | 300 |
48. | 220 | 600 | 200 | +40 | 150 |
49. | 300 | 620 | 200 | 0 | 100 |
50. | 300 | 500 | 200 | -50 | 60 |
51. | 300 | 400 | 200 | -50 | 150 |
52. | 240 | 400 | 250 | +70 | 70 |
53. | 300 | 580 | 200 | +80 | 70 |
54. | 200 | 500 | 300 | -70 | 230 |
55. | 200 | 600 | 100 | +60 | 240 |





Вы должны обрабатывать это упражнение.1645
Упражнение № 2
Не определено
- Нарисуйте позиции этого механизма с ползунком, когда:
φ = 0o, 30o, 45o, 60o, 90o, 120o, 135o, 150o, 180o, 225o, 240o, 120o, 135o, 150o, 180o, 225o, 240o, 240o, 120o, 135o, 150o, 180o, 225o, 240o, 240o, 120o, 135o, 150o, 180o, 225o, 240o.