Кинетическая и энергия – Кинетическая и потенциальная энергии
alexxlab | 12.08.2019 | 0 | Разное
Энергия. Виды механической энергии. Работа и энергия. | |
Энергия – физическая величина, характеризующая состояние тела или системы тел по их движению и взаимодействию. В механике энергия тела или системы тел определяется взаимным положением тел или системы тел и их скоростями. При изменении состояния тела (изменении энергии) совершается механическая работа. Т.о. изменение энергии при переходе системы из одного состояния в другое равно работе внешних сил. Механическая работа – мера изменения энергии тела. | |
В механике выделяют два вида энергии: кинетическую энергию и потенциальную энергию. |
|
Кинетическая энергия. Кинетическая энергия – энергия движущегося тела |
|
Пусть тело движется под действием постоянной силы в направлении действия силы. Тогда: .
Т.к. . Т.к. движение равноускоренное, то: . | |
Следовательно: . | |
– кинетической энергией называется величина, равная половине произведения массы тела на квадрат его скорости. |
[Ek]=Дж. |
Кинетическая энергия – величина относительная, зависящая от выбора СО, т.к. скорость тела зависит от выбора СО. |
|
Т.о. – эта формула выражает теорему о кинетической энергии: изменение кинетической энергии тела (материальной точки)за некоторый промежуток времени равно работе, совершенной силой, действующей на тело, за этот же промежуток времени | |
Эта теорема справедлива для любого движения и для сил любой природы. Если тело разгоняется из состояния покоя, то Ek1=0. Тогда A = Ek2. Следовательно, кинетическая энергия численно равна работе, которую необходимо совершить, чтобы разогнать тело из состояния покоя до данной скорости. |
|
Вывод: Работа силы равна изменению кинетической энергии тела, т.е. A = ΔEk. Причем, A>0 | A = ΔEk |
www.eduspb.com
Энергия. Кинетическая энергия
Открытие закона сохранения импульса, который утверждает, что векторная сумма импульсов всех тел (или частиц) замкнутой системы есть величина постоянная, показало, что механическое движение тел имеет количественную меру, сохраняющуюся при любых взаимодействиях тел. Этой мерой является импульс. Однако только с помощью этого закона не получится дать полное объяснение всех закономерностей движения и взаимодействия тел.
Рассмотрим пример. Пуля массой 9 грамм, находящаяся в состоянии покоя, абсолютно безвредна. Но во время выстрела при соприкосновении с препятствием пуля деформирует его. Очевидно, что такой разрушительный эффект получается в результате того, что пуля обладает особой энергией.
Рассмотрим другой пример. Два одинаковых пластилиновых шара движутся навстречу друг другу с одинаковыми скоростями. При столкновении они останавливаются и соединяются в одно тело.
Сумма импульсов шаров до столкновения и после столкновения одинакова и равна нулю, закон сохранения импульсов выполняется. Что же происходит с пластилиновыми шарами при их столкновении, кроме изменения скорости движения? Шары деформируются и нагреваются.
Повышение температуры тел при столкновении можно наблюдать, например, при ударе молотка по свинцовому или медному стержню. Изменение температуры тела свидетельствует об изменениях скоростей хаотичного теплового движения атомов, из которого состоит тело. Следовательно, механическое движение не исчезло бесследно, оно превратилось в другую форму движения материи.
Вернёмся к вопросу, который мы ставили выше. Имеется ли в природе мера движения материи, сохраняющаяся при любых превращениях одной формы движения в другую? Опыты и наблюдения показали, что такая мера движения в природе существует. Её назвали энергией.
Энергией называется физическая величина, являющаяся количественной мерой различных форм движения материи.
Для точного определения энергии как физической величины необходимо найти её связь с другими величинами, выбрать единицу измерения и найти способы её измерения.
Механической энергией называется физическая величина, которая является количественной мерой механического движения.
В физике в качестве такой количественной меры поступательного механического движения при возникновении его из других форм движения или превращении в другие формы движения принята величина, равная половине произведения массы тела на квадрат скорости его движения. Эта физическая величина называется кинетической энергией тела и обозначается буквой Е с индексом к:
Ек = mv2/ 2
Так как скорость является величиной, зависящей от выбора системы отсчёта, значение кинетической энергии тела зависит от выбора системы отсчёта.
Существуеттеорема о кинетической энергии. «Работа приложенной к телу равнодействующей силы равна изменению его кинетической энергии»:
А = Ек2 -Ек1
Данная теорема будет справедлива и когда тело движется под действием константной силы, и когда тело движется по действием изменяющейся силы, направление которой не совпадает с направлением перемещения. Кинетическая энергия – это энергия движения. Получается, кинетическая энергия тела массой m, движущегося со скоростью v равна работе, которую должна совершить сила, приложенная к покоящемуся телу, чтобы сообщить ему эту скорость:
А = mv2/ 2 = Ек
Если тело будет двигаться со скоростью v, то для его полной остановки необходимо совершить работу:
А = -mv2/ 2 = -Ек
За единицу работы в международной системе принимается работа, совершаемая силой 1 Ньютон на пути 1 метр при движении по направлению вектора силы. Эта единица измерения работы называется Джоулем.
1 Дж = 1 кг · м2/ c2
Так как работа равна изменению энергии, для измерения энергии используется та же единица измерения, что и для измерения работы. Единица энергии в СИ – 1Дж.
Остались вопросы? Не знаете, что такое кинетическая энергия?
Чтобы получить помощь репетитора – зарегистрируйтесь.
Первый урок – бесплатно!
Зарегистрироваться
© blog.tutoronline.ru, при полном или частичном копировании материала ссылка на первоисточник обязательна.
blog.tutoronline.ru
Кинетическая и потенциальная энергия. Закон сохранения энергии
Понятие энергии
Энергия – скалярная величина. В системе СИ единицей измерения энергии является Джоуль.
Кинетическая и потенциальная энергия
Различают два вида энергии – кинетическую и потенциальную.
Потенциальная энергия в поле тяготения Земли – это энергия, обусловленная гравитационным взаимодействием тела с Землей. Она определяется положением тела относительно Земли и равна работе силы тяжести по перемещению тела из данного положения на нулевой уровень:
Потенциальная энергия упруго деформированного тела – энергия, обусловленная взаимодействием частей тела друг с другом. Она равна работе внешних сил по растяжению (сжатию) недеформированной пружины на величину :
Тело может одновременно обладать и кинетической, и потенциальной энергией.
Полная механическая энергия тела или системы тел равна сумме кинетической и потенциальной энергий тела (системы тел):
Закон сохранения энергии
Для замкнутой системы тел справедлив закон сохранения энергии:
- полная механическая энергия замкнутой системы тел есть величина постоянная:
В случае, когда на тело (или систему тел) действуют внешние силы, например, сила трения, закон сохранения механической энергии не выполняется. В этом случае изменение полной механической энергии тела (системы тел) равно работе внешних сил:
Закон сохранения энергии позволяет установить количественную связь между различными формами движения материи. Так же, как и закон сохранения импульса, он справедлив не только для механических движений, но и для всех явлений природы. Закон сохранения энергии говорит о том, что в энергию в природе нельзя уничтожить так же, как и создать из ничего.
В наиболее общем виде закон сохранения энергии можно сформулировать так:
- энергия в природе не исчезает и не создается вновь, а только превращается из одного вида в другой.
Примеры решения задач
| Понравился сайт? Расскажи друзьям! | |||
ru.solverbook.com
§ 12. Кинетическая и потенциальная энергии
Кинетическая энергия механической системы — это энергия механического движения этой системы.
Сила F, действуя на покоящееся тело и вызывая его движение, совершает работу, а энергия движущегося тела возрастает на величину затраченной работы. Таким образом, работа dA силы F на пути, который тело прошло за время возрастания скорости от 0 до v, идет на увеличение кинетической энергии dT тела, т. е.
dA= dT.
Используя второй закон Ньютона F=mdv/dt
и умножая обе части равенства на перемещение dr, получим
Fdr =m(dv/dt)dr=dA
23
Таким образом, тело массой т, движущееся со скоростью v, обладает кинетической энергией
Т = тv2/2. (12.1)
Из формулы (12.1) видно, что кинетическая энергия зависит только от массы и скорости тела, т. е. кинетическая энергия системы есть функция состояния ее движения.
При выводе формулы (12.1) предполагалось, что движение рассматривается в инерциальной системе отсчета, так как иначе нельзя было бы использовать законы Ньютона. В разных инерциальных системах отсчета, движущихся друг относительно друга, скорость тела, а следовательно, и его кинетическая энергия будут неодинаковы. Таким образом, кинетическая энергия зависит от выбора системы отсчета.
Потенциальная энергия — механическая энергия системы тел, определяемая их взаимным расположением и характером сил взаимодействия между ними.
Пусть взаимодействие тел осуществляется посредством силовых полей (например, поля упругих сил, поля гравитационных сил), характеризующихся тем, что работа, совершаемая действующими силами при перемещении тела из одного положения в другое, не зависит от того, по какой траектории это перемещение произошло, а зависит только от начального и конечного положений. Такие поля называются потенциальными, а силы, действующие в них,— консервативными. Если же работа, совершаемая силой, зависит от траектории перемещения тела из одной точки в другую, то такая сила называется диссипативной; ее примером является сила трения.
Тело, находясь в потенциальном поле сил, обладает потенциальной энергией II. Работа консервативных сил при элементарном (бесконечно малом) изменении конфигурации системы равна приращению потенциальной энергии, взятому со знаком минус, так как работа совершается за счет убыли потенциальной энергии:
dA=-dП. (12.2)
Работа dА выражается как скалярное произведение силы F на перемещение dr и выражение (12.2) можно записать в виде
Fdr=-dП. (12.3)
Следовательно, если известна функция П(r), то из формулы (12.3) можно найти силу F по модулю и направлению.
Потенциальная энергия может быть определена исходя из (12.3) как
где С — постоянная интегрирования, т. е. потенциальная энергия определяется с точностью до некоторой произвольной постоянной. Это, однако, не отражается на физических законах, так как в них входит или разность потенциальных энергий в двух положениях тела, или производная П по координатам. Поэтому потенциальную энергию тела в каком-то определенном положении считают равной нулю (выбирают нулевой уровень отсчета), а энергию тела в других положениях отсчитывают относительно нулевого уровня. Для консервативных сил
или в векторном виде
F=-gradП, (12.4) где
(i, j, k — единичные векторы координатных осей). Вектор, определяемый выражением (12.5), называется градиентом скаляра П.
24
Для него наряду с обозначением grad П применяется также обозначение П. («набла») означает символический вектор, называемый оператором Гамильтона или набла-оператором:
Конкретный вид функции П зависит от характера силового поля. Например, потенциальная энергия тела массой т, поднятого на высоту h над поверхностью Земли, равна
П = mgh, (12.7)
где высота h отсчитывается от нулевого уровня, для которого П0 = 0. Выражение (12.7) вытекает непосредственно из того, что потенциальная энергия равна работе силы тяжести при падении тела с высоты h на поверхность Земли.
Так как начало отсчета выбирается произвольно, то потенциальная энергия может иметь отрицательное значение (кинетическая энергия всегда положительна!}. Если принять за нуль потенциальную энергию тела, лежащего на поверхности Земли, то потенциальная энергия тела, находящегося на дне шахты (глубина h’), П=–mgh’.
Найдем потенциальную энергию упругодеформированного тела (пружины). Сила упругости пропорциональна деформации:
Fх упр= -kx,
где Fxупр — проекция силы упругости на ось х; k — коэффициент упругости (для пружины — жесткость), а знак минус указывает, что Fx упр направлена в сторону, противоположную деформации х.
По третьему закону Ньютона, деформирующая сила равна по модулю силе упругости и противоположно ей направлена, т. е.
Fx=-Fx упр=kx Элементарная работа dA, совершаемая силой Fx при бесконечно малой деформации dx, равна
dA = Fx dx = kxdx,
а полная работа
идет на увеличение потенциальной энергии пружины. Таким образом, потенциальная энергия упругодеформированного тела
П=kx2/2.
Потенциальная энергия системы, подобно кинетической энергии, является функцией состояния системы. Она зависит только от конфигурации системы и ее положения по отношению к внешним телам.
Полная механическая энергия системы — энергия механического движения и взаимодействия:
Е = Е+П,
т. е. равна сумме кинетической и потенциальной энергий.
studfiles.net
Кинетическая и потенциальная энергия | LAMPA
Кинетическая энергия
Если вы хоть немного занимались когда-нибудь физикой или просто хотя бы сидели на уроке физики, печально рассматривая ворон за окном, то вы наверняка слышали такое словосочетание — “кинетическая энергия”. Нам предстоит понять, что это такое.
Наверняка вы слышали слово “энергия” и в повседневной жизни: “У него есть энергия, он энергичный человек”. Опыт нашей бытовой жизни подсказывает нам, что слово энергия означает наличие возможности что-то сделать — то есть совершить работу. Именно так обстоит дело и в физике: энергия — это источник, возможность совершения работы. А теперь — поподробнее.
Итак, мы помним, что работа силы равна
A=F⃗⋅S⃗A=\vec{F}\cdot\vec{S}A=F⃗⋅S⃗.
Если мы хотим найти работу равнодействующей силы, то для равнодействующей силы по 2-му закону Ньютона мы можем написать
F⃗=m⋅a⃗\vec{F}=m\cdot\vec{a}F⃗=m⋅a⃗.
Тогда работа равнодействующей силы перепишется в следующем виде:
A=F⃗⋅S⃗=ma⃗⋅S⃗A=\vec{F}\cdot\vec{S}=m\vec{a}\cdot\vec{S}A=F⃗⋅S⃗=ma⃗⋅S⃗.
Хм… В формуле стоит произведение a⃗⋅S⃗\vec{a}\cdot\vec{S}a⃗⋅S⃗. Где-то это уже было…
Точно! Что-то похожее было в кинематике, в безвременной формуле (в теме “Равноускоренное движение”):
2a⃗⋅S⃗=V22−V122\vec{a}\cdot\vec{S}=V_2^2-V_1^22a⃗⋅S⃗=V22−V12.
Тогда можно переписать работу равнодействующей силы:
A=F⃗⋅S⃗=ma⃗⋅S⃗=mV22−V122=mV222−mV122.A=\vec{F}\cdot\vec{S}=m\vec{a}\cdot\vec{S}=m\frac{V_2^2-V_1^2}{2}=\frac{mV_2^2}{2}-\frac{mV_1^2}{2}.A=F⃗⋅S⃗=ma⃗⋅S⃗=m2V22−V12=2mV22−2mV12.
Видно, что работа силы равна изменению некоторой величины mV22\frac{mV^2}{2}2mV2. Эту величину называют кинетической энергией:
Ek=mV22E_k=\frac{mV^2}{2}Ek=2mV2.
A=mV222−mV122=Ek2−Ek1A=\frac{mV_2^2}{2}-\frac{mV_1^2}{2}=E_{k2}-E_{k1}A=2mV22−2mV12=Ek2−Ek1.
“Кинетическая” — значит, связана она с кинетикой, с движением. “Кинетическая энергия” — это энергия движения.
Попробуем “прочувствовать” эту новую величину, кинетическую энергию.
Ситуация 1
Тело разгоняется силой F⃗\vec{F}F⃗, которая направлена так же, как и перемещение, которое приобретает тело под действием этой силы.
При этом скорость будет увеличиваться: V2>V1V_2>V_1V2>V1. Кинетическая энергия тоже будет увеличиваться: mV222>mV122\frac{mV_2^2}{2}>\frac{mV_1^2}{2}2mV22>2mV12, — а разница энергий будет больше нуля: mV222−mV122>0\frac{mV_2^2}{2}-\frac{mV_1^2}{2}>02mV22−2mV12>0.
При этом и работа будет положительная, потому что сила и перемещение направлены в одну и ту же сторону: A>0A>0A>0. Это значит, что
работа “полезной” силы увеличивает кинетическую энергию системы.
Ситуация 2
Тело тормозится силой F⃗\vec{F}F⃗.
Скорость при этом уменьшается: V2<V1V_2<V_1V2<V1. Кинетическая энергия — тоже: mV222<mV122\frac{mV_2^2}{2}<\frac{mV_1^2}{2}2mV22<2mV12. Это значит, что mV222−mV122<0\frac{mV_2^2}{2}-\frac{mV_1^2}{2}<02mV22−2mV12<0. Работа при этом тоже отрицательная из-за угла в 180∘180^{\circ}180∘ между направлением силы и перемещения: A<0A<0A<0, — так же как и изменение кинетической энергии. Получается, что работа “неполезной” силы уменьшает кинетическую энергию.
Изменение кинетической энергии равно работе — значит, кинетическая энергия измеряется в тех же единицах, что и работа — в Джоулях:
[Ek]=[mV22]=1 Дж[E_k]=[\frac{mV^2}{2}]=1\text{ Дж}[Ek]=[2mV2]=1 Дж.
Рассмотрим пример.
lampa.io
§ 12. Кинетическая и потенциальная энергии
Кинетическая энергия механической системы — это энергия механического движения этой системы.
Сила F, действуя на покоящееся тело и вызывая его движение, совершает работу, а энергия движущегося тела возрастает на величину затраченной работы. Таким образом, работа dA силы F на пути, который тело прошло за время возрастания скорости от 0 до v, идет на увеличение кинетической энергии dT тела, т. е.
dA= dT.
Используя второй закон Ньютона F=mdv/dt
и умножая обе части равенства на перемещение dr, получим
Fdr =m(dv/dt)dr=dA
23
Таким образом, тело массой т, движущееся со скоростью v, обладает кинетической энергией
Т = тv2/2. (12.1)
Из формулы (12.1) видно, что кинетическая энергия зависит только от массы и скорости тела, т. е. кинетическая энергия системы есть функция состояния ее движения.
При выводе формулы (12.1) предполагалось, что движение рассматривается в инерциальной системе отсчета, так как иначе нельзя было бы использовать законы Ньютона. В разных инерциальных системах отсчета, движущихся друг относительно друга, скорость тела, а следовательно, и его кинетическая энергия будут неодинаковы. Таким образом, кинетическая энергия зависит от выбора системы отсчета.
Потенциальная энергия — механическая энергия системы тел, определяемая их взаимным расположением и характером сил взаимодействия между ними.
Пусть взаимодействие тел осуществляется посредством силовых полей (например, поля упругих сил, поля гравитационных сил), характеризующихся тем, что работа, совершаемая действующими силами при перемещении тела из одного положения в другое, не зависит от того, по какой траектории это перемещение произошло, а зависит только от начального и конечного положений. Такие поля называются потенциальными, а силы, действующие в них,— консервативными. Если же работа, совершаемая силой, зависит от траектории перемещения тела из одной точки в другую, то такая сила называется диссипативной; ее примером является сила трения.
Тело, находясь в потенциальном поле сил, обладает потенциальной энергией II. Работа консервативных сил при элементарном (бесконечно малом) изменении конфигурации системы равна приращению потенциальной энергии, взятому со знаком минус, так как работа совершается за счет убыли потенциальной энергии:
dA=-dП. (12.2)
Работа dА выражается как скалярное произведение силы F на перемещение dr и выражение (12.2) можно записать в виде
Fdr=-dП. (12.3)
Следовательно, если известна функция П(r), то из формулы (12.3) можно найти силу F по модулю и направлению.
Потенциальная энергия может быть определена исходя из (12.3) как
где С — постоянная интегрирования, т. е. потенциальная энергия определяется с точностью до некоторой произвольной постоянной. Это, однако, не отражается на физических законах, так как в них входит или разность потенциальных энергий в двух положениях тела, или производная П по координатам. Поэтому потенциальную энергию тела в каком-то определенном положении считают равной нулю (выбирают нулевой уровень отсчета), а энергию тела в других положениях отсчитывают относительно нулевого уровня. Для консервативных сил
или в векторном виде
F=-gradП, (12.4) где
(i, j, k — единичные векторы координатных осей). Вектор, определяемый выражением (12.5), называется градиентом скаляра П.
24
Для него наряду с обозначением grad П применяется также обозначение П. («набла») означает символический вектор, называемый оператором Гамильтона или набла-оператором:
Конкретный вид функции П зависит от характера силового поля. Например, потенциальная энергия тела массой т, поднятого на высоту h над поверхностью Земли, равна
П = mgh, (12.7)
где высота h отсчитывается от нулевого уровня, для которого П0 = 0. Выражение (12.7) вытекает непосредственно из того, что потенциальная энергия равна работе силы тяжести при падении тела с высоты h на поверхность Земли.
Так как начало отсчета выбирается произвольно, то потенциальная энергия может иметь отрицательное значение (кинетическая энергия всегда положительна!}. Если принять за нуль потенциальную энергию тела, лежащего на поверхности Земли, то потенциальная энергия тела, находящегося на дне шахты (глубина h’), П=–mgh’.
Найдем потенциальную энергию упругодеформированного тела (пружины). Сила упругости пропорциональна деформации:
Fх упр= -kx,
где Fxупр — проекция силы упругости на ось х; k — коэффициент упругости (для пружины — жесткость), а знак минус указывает, что Fx упр направлена в сторону, противоположную деформации х.
По третьему закону Ньютона, деформирующая сила равна по модулю силе упругости и противоположно ей направлена, т. е.
Fx=-Fx упр=kx Элементарная работа dA, совершаемая силой Fx при бесконечно малой деформации dx, равна
dA = Fx dx = kxdx,
а полная работа
идет на увеличение потенциальной энергии пружины. Таким образом, потенциальная энергия упругодеформированного тела
П=kx2/2.
Потенциальная энергия системы, подобно кинетической энергии, является функцией состояния системы. Она зависит только от конфигурации системы и ее положения по отношению к внешним телам.
Полная механическая энергия системы — энергия механического движения и взаимодействия:
Е = Е+П,
т. е. равна сумме кинетической и потенциальной энергий.
studfiles.net
Потенциальная и кинетическая энергия. Закон сохранения механической энергии

1. Камень, упав с некоторой высоты на Землю, оставляет на поверхности Земли вмятину. Во время падения он совершает работу по преодолению сопротивления воздуха, а после касания земли — работу по преодолению силы сопротивления почвы, поскольку обладает энергией. Если накачивать в закрытую пробкой банку воздух, то при некотором давлении воздуха пробка вылетит из банки, при этом воздух совершит работу по преодолению трения пробки о горло банки, благодаря тому, что воздух обладает энергией. Таким образом, тело может совершить работу, если оно обладает энергией. Энергию обозначают буквой \( E \). Единица работы — \( [E\,] \) = 1 Дж.
При совершении работы изменяется состояние тела и изменяется его энергия. Изменение энергии равно совершенной работе: \( E=A \).
2. Потенциальной энергией называют энергию взаимодействия тел или частей тела, зависящую от их взаимного положения.
Поскольку тела взаимодействуют с Землёй, то они обладают потенциальной энергия взаимодействия с Землёй.
Если тело массой \( m \) падает с высоты \( h_1 \) до высоты \( h_2 \), то работа силы тяжести \( F_т \) на участке \( h=h_1-h_2 \) равна: \( A = F_тh = mgh = mg(h_1 — h_2) \) или \( A = mgh_1 — mgh_2 \) (рис. 48).

В полученной формуле \( mgh_1 \) характеризует начальное положение (состояние) тела, \( mgh_2 \) характеризует конечное положение (состояние) тела. Величина \( mgh_1=E_{п1} \) — потенциальная энергия тела в начальном состоянии; величина \( mgh_2=E_{п2} \) — потенциальная энергия тела в конечном состоянии.
Можно записать \( A=E_{п1}-E_{п2} \), или \( A=-(E_{п2}-E_{п1}) \), или \( A=-E_{п} \).
Таким образом, работа силы тяжести равна изменению потенциальной энергии тела. Знак «–» означает, что при движении тела вниз и соответственно при совершении силой тяжести положительной работы потенциальная энергия тела уменьшается. Если тело поднимается вверх, то работа силы тяжести отрицательна, а потенциальная энергия тела увеличивается.
Если тело находится на некоторой высоте \( h \) относительно поверхности Земли, то его потенциальная энергия в данном состоянии равна \( E_п=mgh \). Значение потенциальной энергии зависит от того, относительно какого уровня она отсчитывается. Уровень, на котором потенциальная энергия равна нулю, называют нулевым уровнем.
В отличие от кинетической энергии потенциальной энергией обладают покоящиеся тела. Поскольку потенциальная энергия — это энергия взаимодействия, то она относится не к одному телу, а к системе взаимодействующих тел. В данном случае эту систему составляют Земля и поднятое над ней тело.
3. Потенциальной энергией обладают упруго деформированные тела. Предположим, что левый конец пружины закреплён, а к правому её концу прикреплён груз. Если пружину сжать, сместив правый её конец на \( x_1 \), то в пружине возникнет сила упругости \( F_{упр1} \), направленная вправо (рис. 49).
Если теперь предоставить пружину самой себе, то её правый конец переместится, удлинение пружины будет равно \( x_2 \), а сила упругости \( F_{упр2} \).
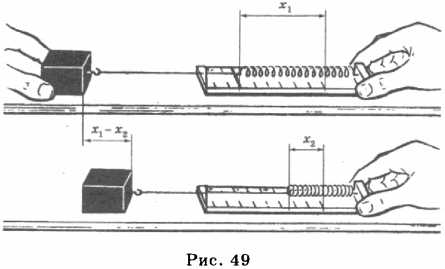
Работа силы упругости равна
\[ A=F_{ср}(x_1-x_2)=k/2(x_1+x_2)(x_1-x_2)=kx_1^2/2-kx_2^2/2 \]
\( kx_1^2/2=E_{п1} \) — потенциальная энергия пружины в начальном состоянии, \( kx_2^2/2=E_{п2} \) — потенциальная энергия пружины во конечном состоянии. Работа силы упругости равна изменению потенциальной энергии пружины.
Можно записать \( A=E_{п1}-E_{п2} \), или \( A=-(E_{п2}-E_{п1}) \), или \( A=-E_{п} \).
Знак «–» показывает, что при растяжении и сжатии пружины сила упругости совершает отрицательную работу, потенциальная энергия пружины увеличивается, а при движении пружины к положению равновесия сила упругости совершает положительную работа, а потенциальная энергия уменьшается.
Если пружина деформирована и её витки смещены относительно положения равновесия на расстояние \( x \), то потенциальная энергия пружины в данном состоянии равна \( E_п=kx^2/2 \).
4. Движущиеся тела так же могут совершить работу. Например, движущийся поршень сжимает находящийся в цилиндре газ, движущийся снаряд пробивает мишень и т.п. Следовательно, движущиеся тела обладают энергией. Энергия, которой обладает движущееся тело, называется кинетической энергией. Кинетическая энергия \( E_к \) зависит от массы тела и его скорости \( E_к=mv^2/2 \). Это следует из преобразования формулы работы.
Работа \( A=FS \). Сила \( F=ma \). Подставив это выражение в формулу работы, получим \( A=maS \). Так как \( 2aS=v^2_2-v^2_1 \), то \( A=m(v^2_2-v^2_1)/2 \) или \( A=mv^2_2/2-mv^2_1/2 \), где \( mv^2_1/2=E_{к1} \) — кинетическая энергия тела в первом состоянии, \( mv^2_2/2=E_{к2} \) — кинетическая энергия тела во втором состоянии. Таким образом, работа силы равна изменению кинетической энергии тела: \( A=E_{к2}-E_{к1} \), или \( A=E_к \). Это утверждение — теорема о кинетической энергии.
Если сила совершает положительную работу, то кинетическая энергия тела увеличивается, если работа силы отрицательная, то кинетическая энергия тела уменьшается.
5. Полная механическая энергия \( E \) тела — физическая величина, равная сумме его потенциальной \( E_п \) и кинетической \( E_п \) энергии: \( E=E_п+E_к \).
Пусть тело падает вертикально вниз и в точке А находится на высоте \( h_1 \) относительно поверхности Земли и имеет скорость \( v_1 \) (рис. 50). В точке В высота тела \( h_2 \) и скорость \( v_2 \) Соответственно в точке А тело обладает потенциальной энергией \( E_{п1} \) и кинетической энергией \( E_{к1} \), а в точке В — потенциальной энергией \( E_{п2} \) и кинетической энергией \( E_{к2} \).
При перемещении тела из точки А в точку В сила тяжести совершает работу, равную А. Как было показано, \( A=-(E_{п2}-E_{п1}) \), а также \( A=E_{к2}-E_{к1} \). Приравняв правые части этих равенств, получаем: \( -(E_{п2}-E_{п1})=E_{к2}-E_{к1} \), откуда \( E_{к1}+E_{п1}=E_{п2}+E_{к2} \) или \( E_1=E_2 \).
Это равенство выражает закон сохранения механической энергии: полная механическая энергия замкнутой системы тел, между которыми действуют консервативные силы (силы тяготения или упругости) сохраняется.
В реальных системах действуют силы трения, которые не являются консервативными, поэтому в таких системах полная механическая энергия не сохраняется, она превращается во внутреннюю энергию.
ПРИМЕРЫ ЗАДАНИЙ
Часть 1
1. Два тела находятся на одной и той же высоте над поверхностью Земли. Масса одного тела \( m_1 \) в три раза больше массы другого тела \( m_2 \). Относительно поверхности Земли потенциальная энергия
1) первого тела в 3 раза больше потенциальной энергии второго тела
2) второго тела в 3 раза больше потенциальной энергии первого тела
3) первого тела в 9 раз больше потенциальной энергии второго тела
4) второго тела в 9 раз больше потенциальной энергии первого тела
2. Сравните потенциальную энергию мяча на полюсе \( E_п \) Земли и на широте Москвы \( E_м \), если он находится на одинаковой высоте относительно поверхности Земли.
1) \( E_п=E_м \)
2) \( E_п>E_м \)
3) \( E_п<E_м \)
4) \( E_п\geq E_м \)
3. Тело брошено вертикально вверх. Его потенциальная энергия
1) одинакова в любые моменты движения тела
2) максимальна в момент начала движения
3) максимальна в верхней точке траектории
4) минимальна в верхней точке траектории
4. Как изменится потенциальная энергия пружины, если её удлинение уменьшить в 4 раза?
1) увеличится в 4 раза
2) увеличится в 16 раз
3) уменьшится в 4 раза
4) уменьшится в 16 раз
5. Лежащее на столе высотой 1 м яблоко массой 150 г подняли относительно стола на 10 см. Чему стала равной потенциальная энергия яблока относительно пола?
1) 0,15 Дж
2) 0,165 Дж
3) 1,5 Дж
4) 1,65 Дж
6. Скорость движущегося тела уменьшилась в 4 раза. При этом его кинетическая энергия
1) увеличилась в 16 раз
2) уменьшилась в 16 раз
3) увеличилась в 4 раза
4) уменьшилась в 4 раза
7. Два тела движутся с одинаковыми скоростями. Масса второго тела в 3 раза больше массы первого. При этом кинетическая энергия второго тела
1) больше в 9 раз
2) меньше в 9 раз
3) больше в 3 раза
4) меньше в 3 раза
8. Тело падает на пол с поверхности демонстрационного стола учителя. (Сопротивление воздуха не учитывать.) Кинетическая энергия тела
1) минимальна в момент достижения поверхности пола
2) минимальна в момент начала движения
3) одинакова в любые моменты движения тела
4) максимальна в момент начала движения
9. Книга, упавшая со стола на пол, обладала в момент касания пола кинетической энергией 2,4 Дж. Высота стола 1,2 м. Чему равна масса книги? Сопротивлением воздуха пренебречь.
1) 0,2 кг
2) 0,288 кг
3) 2,0 кг
4) 2,28 кг
10. С какой скоростью следует бросить тело массой 200 г с поверхности Земли вертикально вверх, чтобы его потенциальная энергия в наивысшей точке движения была равна 0,9 Дж? Сопротивлением воздуха пренебречь. Потенциальную энергию тела отсчитывать от поверхности земли.
1) 0,9 м/с
2) 3,0 м/с
3) 4,5 м/с
4) 9,0 м/с
11. Установите соответствие между физической величиной (левый столбец) и формулой, по которой она вычисляется (правый столбец). В ответе запишите подряд номера выбранных ответов
ФИЗИЧЕСКАЯ ВЕЛИЧИНА
A. Потенциальная энергия взаимодействия тела с Землёй
Б. Кинетическая энергия
B. Потенциальная энергия упругой деформации
ХАРАКТЕР ИЗМЕНЕНИЯ ЭНЕРГИИ
1) \( E=mv^2/2 \)
2) \( E=kx^2/2 \)
3) \( E=mgh \)
12. Мяч бросили вертикально вверх. Установите соответствие между энергией мяча (левый столбец) и характером её изменения (правый столбец) при растяжении пружины динамометра. В ответе запишите подряд номера выбранных ответов.
ФИЗИЧЕСКАЯ ВЕЛИЧИНА
A. Потенциальная энергия
Б. Кинетическая энергия
B. Полная механическая энергия
ХАРАКТЕР ИЗМЕНЕНИЯ ЭНЕРГИИ
1) Уменьшается
2) Увеличивается
3) Не изменяется
Часть 2
13. Пуля массой 10 г, движущаяся со скоростью 700 м/с, пробила доску толщиной 2,5 см и при выходе из доски имела скорость 300 м/с. Определить среднюю силу сопротивления, воздействующую на пулю в доске.
Ответы

Потенциальная и кинетическая энергия. Закон сохранения механической энергии
Оценкаfizi4ka.ru