Лазерный дальномер своими руками: Самодельный сканирующий лазерный дальномер / Хабр
alexxlab | 09.04.1989 | 0 | Разное
Самодельный сканирующий лазерный дальномер / Хабр
В этой статье я расскажу о том, как я делал самодельный лазерный сканирующий дальномер, использующий триангуляционный принцип измерения расстояния, и об опыте его использования на роботе.
Зачем нужен сканирующий дальномер?
На сегодняшний день в робототехнике не так уж и много методов навигации внутри помещений. Определение положения робота в пространстве с использованием лазерного сканера — один из них. Важное достоинство этого метода — он не требует установки в помещении каких-либо маяков. В отличие от систем, использующих распознавание изображения с камер, обработка данных с дальномера не так ресурсоемка. Но есть и недостаток — сложность, и соответственно, цена дальномера.
Традиционно в робототехнике используются лазерные сканеры, использующие фазовый или времяпролетный принцип для измерения расстояния до объектов. Реализация этих принципов требует довольно сложной схемотехники и дорогих деталей, хотя и характеристики при этом получаются приличные — используя эти принципы, можно добиться высокой скорости сканирования и большой дальности измерения расстояния.
Но для домашних экспериментов в робототехнике такие сканеры мало подходят — цена на них начинаются от 1000$.
На помощь приходят дальномеры, использующие триангуляционный принцип измерения расстояния. Дальномер такого типа впервые появился в роботах-пылесосах Neato:
Довольно быстро любители расшифровали протокол этого дальномера, и начали использовать его в своих проектах. Сами дальномеры в качестве запчастей появились на ebay в небольших количествах по цене около 100$. Через несколько лет китайская компания смогла выпустить сканирующий дальномер RPLIDAR, который поставлялся как полноценный прибор, а не запчасть. Только цена этих дальномеров оказалась достаточно высокой — 400$.
Самодельный дальномер
Как только я узнал о дальномерах Neato, мне захотелось собрать самому аналогичный. В конце концов, мне это удалось, и процесс сборки я описал на Робофоруме.
Позже я сделал еще одну версию дальномера, более пригодную для использования на реальном роботе, но и ее качество работы не полностью устроило меня. Настало время третьей версии дальномера, и именно она будет описана далее.
Настало время третьей версии дальномера, и именно она будет описана далее.
Устройство сканирующего триангуляционного лазерного дальномера
Принцип измерения расстояния до объекта основан на измерении угла между лазерным лучом, попадающим на объект, и объективом дальномера. Зная расстояние лазер-объектив (h) и измеренный угол, можно вычислить расстояние до объекта — чем меньше угол, тем больше расстояние.
Принцип хорошо иллюстрирует картинка из статьи:
Таким образом, ключевые оптические компоненты такого дальномера — лазер, объектив и фотоприемная линейка.
Так как дальномер сканирующий, то все эти детали, а так же управляющая электроника устанавливаются на вращающейся головке.
 Соответственно, для кругового сканирования понадобится зеркало диаметром, большим базового расстояния. Дальномер с таким зеркалом получается достаточно громоздким.
Соответственно, для кругового сканирования понадобится зеркало диаметром, большим базового расстояния. Дальномер с таким зеркалом получается достаточно громоздким.Сканирующая головка дальномера при помощи подшипника закрепляется на неподвижном основании. На нем же закрепляется двигатель, вращающий головку. Также в состав дальномера должен входить энкодер, предназначенный для получения информации о положении головки.
Как видно, дальномеры Neato, RPLIDAR и мои самодельные сделаны именно по этой схеме.
Самое сложное в самодельном дальномере — изготовление механической части. Именно ее работа вызывала у меня больше всего нареканий в ранних версиях дальномера. Сложность заключается в изготовлении сканирующей головки, которая должна быть прочно закреплена на подшипнике, вращаться без биений и при этом не нее нужно каким-то образом передавать электрические сигналы.
 В то же время, при этом возникла третья проблема — электрические линии можно было провести только через небольшое отверстие в оси двигателя. Мне удалось сделать самодельный щеточный узел на 3 линии, закрепленный в этом отверстии, но получившаяся конструкция получилась шумной и ненадежной. При этом возникла еще одна проблема — линии, чтобы пробросить сигнал энкодера, не было, и датчик энкодера в такой конструкции должен быть установлен на головке, а диск энкодера с метками — на неподвижном основании. Диск энкодера получился не жестким, и это часто вызывало проблемы.
В то же время, при этом возникла третья проблема — электрические линии можно было провести только через небольшое отверстие в оси двигателя. Мне удалось сделать самодельный щеточный узел на 3 линии, закрепленный в этом отверстии, но получившаяся конструкция получилась шумной и ненадежной. При этом возникла еще одна проблема — линии, чтобы пробросить сигнал энкодера, не было, и датчик энкодера в такой конструкции должен быть установлен на головке, а диск энкодера с метками — на неподвижном основании. Диск энкодера получился не жестким, и это часто вызывало проблемы.Еще один недостаток получившегося дальномера — низкая скорость сканирования и сильное падение точности на расстояниях больше 3м.
Именно эти недостатки я решил устранить в третьей версии дальномера.
Электроника
В принципе, электронная часть триангуляционного дальномера достаточно проста и содержит всего два ключевых компонента -светочувствительную линейку и микроконтроллер. Если с выбором контроллера проблем нет, то с линейкой все значительно сложнее. Светочувствительная линейка, используемая в подобном дальномере, должна одновременно иметь достаточно высокую световую чувствительность, позволять считывать сигнал с высокой скоростью и иметь маленькие габариты. Различные CCD линейки, применяемые в бытовых сканерах, обычно довольно длинные. Линейки, используемые в сканерах штрихкодов — тоже не самые короткие и быстрые.
Если с выбором контроллера проблем нет, то с линейкой все значительно сложнее. Светочувствительная линейка, используемая в подобном дальномере, должна одновременно иметь достаточно высокую световую чувствительность, позволять считывать сигнал с высокой скоростью и иметь маленькие габариты. Различные CCD линейки, применяемые в бытовых сканерах, обычно довольно длинные. Линейки, используемые в сканерах штрихкодов — тоже не самые короткие и быстрые.
В третьей версии дальномера я решил использовать линейку ELIS-1024:
Однако купить ее оказалось непросто. У основных поставщиков электроники этих линеек просто нет.
Первая линейка, которую я смог купить на Taobao, оказалась нерабочей. Второю я купил на Aliexpress (за 18$), она оказалась рабочей. Обе линейки выглядели паянными — обе имели облуженные контакты и, судя по маркировке, были изготовлены в 2007 году. Причем даже на фотографиях у большинства китайских продавцов линейки именно такие. Похоже, что действительно новую линейку ELIS-1024 можно купить только напрямую у производителя.
Второю я купил на Aliexpress (за 18$), она оказалась рабочей. Обе линейки выглядели паянными — обе имели облуженные контакты и, судя по маркировке, были изготовлены в 2007 году. Причем даже на фотографиях у большинства китайских продавцов линейки именно такие. Похоже, что действительно новую линейку ELIS-1024 можно купить только напрямую у производителя.
Еще более хорошими характеристиками обладает линейка DLIS-2K. При сходных размерах, она содержит 2048 пикселей и имеет цифровой выход. Насколько мне известно, именно она используется в дальномере Neato, и возможно, в RPLIDAR. Однако, найти ее в свободной продаже очень сложно, даже в китайских магазинах она появляется не часто и дорого стоит — более 50$.
Так как я решил использовать линейку с аналоговым выходом сигнала, то микроконтроллер дальномера должен содержать достаточно быстрый АЦП.
В результате у меня получилась такая схема:
Сигнал с линейки (вывод 10) имеет достаточно высокий уровень постоянной составляющей, и ее приходится отфильтровывать при помощи разделительного конденсатора.
Далее сигнал нужно усилить — для этого используется операционный усилитель AD8061. Далеко расположенные объекты дают достаточно слабый сигнал, так что пришлось установить коэффициент усиления равным 100.
Как оказалось в результате экспериментов, даже при отсутствии сигнала, на выходе выбранного ОУ по какой-то причине постоянно присутствует напряжение около 1.5В, что мешает обработке результатов и ухудшает точность измерения амплитуды сигнала. Для того, чтобы избавится от этого смещения, мне пришлось подать дополнительное напряжение на инвертирующий вход ОУ.
Плату разводил двухстороннюю, сделать такую плату в домашних условиях качественно довольно сложно, так что заказал изготовление плат в Китае (пришлось заказать сразу 10 штук):
В этом дальномере я использовал дешевый объектив с резьбой M12, имеющий фокусное расстояние 16мм. Объектив закреплен на печатной плате при помощи готового держателя объектива (такие используются в различных камерах).
Объектив закреплен на печатной плате при помощи готового держателя объектива (такие используются в различных камерах).
Лазер в данном дальномере — инфракрасный (780 нм) лазерный модуль, мощностью 3.5 мВт.
Изначально я предполагал, что излучение лазера нужно будет модулировать, но позже оказалось, что с используемой линейкой в этом нет смысла, и поэтому сейчас лазер включен постоянно.
Для проверки работоспособности электроники была собрана вот такая конструкция, имитирующая сканирующую головку дальномера:
Уже в таком виде можно было проверить, какую точность измерения расстояния позволяет обеспечить дальномер.
Для анализа сигнала, формируемого линейкой, были написаны тестовые программы для микроконтроллера и ПК.
Пример вида сигнала с линейки (объект на расстоянии 3 м).
Изначально схема была не совсем такая, как приведена выше. В ходе экспериментов мне пришлось частично переделать изначальную схему, так что, как видно из фотографий, некоторые детали пришлось установить навесным монтажом.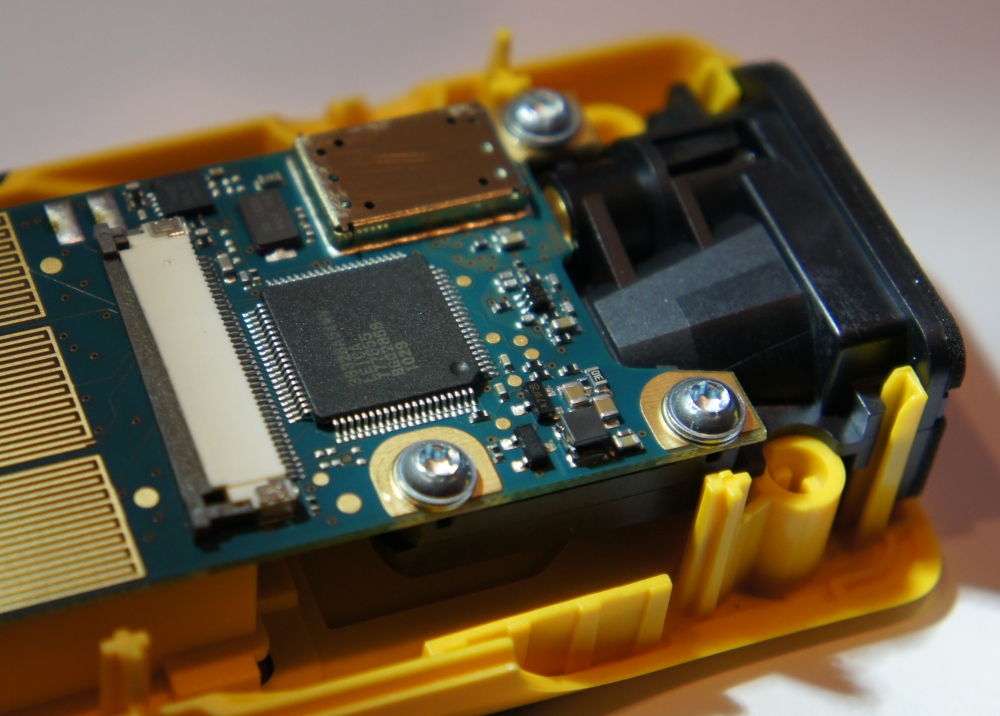
Механическая часть
После того, как электроника была отлажена, настало время изготовить механическую часть.
В этот раз я не стал связываться с механикой из HDD, и решил изготовить механические детали из жидкого пластика, заливаемого в силиконовую форму. Эта технология подробно описана в Интернете, в том числе и на Гиктаймс.
Фото одной из деталей сканирующей головки дальномера:
Эта деталь является основой головки. Она состоит из втулки, на которую позже надевается подшипник, и диска. Диск предназначен для крепления второй детали башни, кроме того, на него снизу наклеивается диск энкодера.
Втулка и диск содержат сквозное отверстие, в которое вставляется покупной щеточный узел на 6 линий — его видно на фотографии. Именно те провода, что видны на фотографии, могут вращаться относительно корпуса этого узла. Для повышения стабильности работы для передачи сигналов GND и UART TX используется 2 пары линий щеток. Оставшиеся 2 линии используются для передачи напряжения питания и сигнала энкодера.
Именно те провода, что видны на фотографии, могут вращаться относительно корпуса этого узла. Для повышения стабильности работы для передачи сигналов GND и UART TX используется 2 пары линий щеток. Оставшиеся 2 линии используются для передачи напряжения питания и сигнала энкодера.
Силиконовая форма для отливки этой детали:
Вторая деталь сканирующей головки была изготовлена тем же способом. Она предназначена для крепления печатной платы и лазера к диску. К сожалению, фотографий изготовления этой детали у меня не сохранилось, так что ее можно увидеть только в составе дальномера.
Для крепления сканирующей головки к основанию дальномера используется шариковый подшипник. Я использовал дешевый китайский подшипник 6806ZZ. Честно говоря, качество подшипника мне не понравилось — ось его внутренней втулки могла отклонятся относительно оси внешней на небольшой угол, из-за чего головка дальномера тоже немного наклоняется. Крепление подшипника к детали с диском и основанию будет показано ниже.
Основание я сделал из прозрачного оргстекла толщиной 5 мм. К основанию крепится подшипник, датчик энкодера, двигатель дальномера и маленькая печатная плата. Само основание устанавливается на любую подходящую поверхность при помощи стоек.
Вот так выглядит основание дальномера снизу:
Печатная плата содержит регулируемый линейный стабилизатор напряжения для питания двигателя, и площадки для подключения проводов узла щеток. Сюда же подводится питание дальномера.
Как и в других дальномерах, двигатель вращает сканирующую головку при помощи пассика. Для того, чтобы он не сваливался с втулки, на ней имеется специальное углубление.
Как видно из фотографии, подшипник закреплен в основании при помощи трех винтов. На сканирующей головке подшипник удерживается за счет выступа на втулке и прижимается к ней другими винтами, одновременно удерживающими щеточный узел.
Энкодер состоит из бумажного диска с напечатанными рисками и оптопары с фототранзистором, работающей на отражение. Оптопара закреплена при помощи стойки на основании так, что плоскость диска оказывается рядом с ней:
Оптопара закреплена при помощи стойки на основании так, что плоскость диска оказывается рядом с ней:
Сигнал от оптопары через щетки передается на вход компаратора микроконтроллера. В качестве источника опорного напряжения для компаратора выступает ЦАП микроконтроллера.
Для того, чтобы дальномер мог определить положение нулевого угла, на диск энкодера нанесена длинная риска, отмечающая нулевое положение головки (она видна справа на фотографии выше).
Вот так выглядит собранный дальномер:
Вид сверху:
Разъем сзади дальномера используется для прошивки микроконтроллера.
Для балансировки сканирующей головки на нее спереди устанавливается крупная гайка — она практически полностью устраняет вибрацию при вращении головки.
Собранный дальномер нужно отюстировать — установить лазер в такое положение, чтобы отраженный от объектов свет попадал на фотоприемную линейку. Обе пластмассовые детали содержат соосные отверстия, располагающиеся под пазом лазера. В отверстия вворачиваются регулировочные винты, упирающиеся в корпус лазера. Поворачивая эти винты, можно изменять наклон лазера.
В отверстия вворачиваются регулировочные винты, упирающиеся в корпус лазера. Поворачивая эти винты, можно изменять наклон лазера.
Наблюдая в программе на компьютере форму и амплитуду принятого сигнала и изменяя наклон лазера, нужно добиться максимальной амплитуды сигнала.
Также триангуляционные дальномеры требуют проведения калибровки, о чем я писал ранее:
Для того, чтобы при помощи датчика можно было измерять расстояние, нужно произвести его калибровку, т.е. определить закон, связывающий результат, возвращаемый датчиком, и реальное расстояние. Сам процесс калибровки представляет собой серию измерений, в результате которых формируется набор расстояний от датчика до некоторого объекта, и соответствующих им результатов.
В данном случае калибровка представляла собой серию измерений расстояний до различных объектов самодельным дальномером и лазерной рулеткой, после чего по полученным парам измерений выполняется регрессионный анализ и составляется математическое выражение.
Получившийся дальномер имеет существенный недостаток — из-за отсутствия модуляции излучения лазера он некорректно работает при любой сильной засветке. Обычное комнатное освещение (даже при использовании мощной люстры) не влияет на работу дальномера, но вот расстояние до поверхностей, прямо освещенных Солнцем, дальномер измеряет неправильно. Для решения этой проблемы в состав дальномера нужно включить интерференционный светофильтр, пропускающий световое излучение только определенной длины волны — в данном случае 780 нм.
Эволюция самодельных дальномеров:
Габаритные размеры получившегося дальномера:
Размер основания: 88×110 мм.
Общая высота дальномера: 65 мм (может быть уменьшена до 55 при уменьшении высоты стоек).
Диаметр сканирующей головки: 80 мм (как у mini-CD диска).
Как и у любого другого триангуляционного дальномера, точность измерения расстояния этого дальномера резко падает с ростом расстояния.
При измерениях расстояния до объекта с коэффициентом отражения около 0. 7 у меня получились примерно такие точностные характеристики:
7 у меня получились примерно такие точностные характеристики:
| Расстояние | Разброс |
|---|---|
| 1 м | <1 см |
| 2 м | 2 см |
| 5 м | 7 см |
Стоимость изготовления дальномера:
| DIY, $ | Опт., $ | |
|---|---|---|
| Основание | ||
| Пластина основания | 1,00 | 0,50 |
| Двигатель | 0,00 | 1,00 |
| Подшипник | 1,50 | 1,00 |
| Щеточный узел | 7,50 | 5,00 |
| Крепежные детали | 0,00 | 2,00 |
| Сканирующая головка | ||
| Контроллер STM32F303CBT6 | 5,00 | 4,00 |
| Фотоприемная линейка | 18,00 | 12,00 |
| Остальная электроника | 4,00 | 3,00 |
| Плата | 1,50 | 0,50 |
| Объектив | 2,00 | 1,50 |
| Держатель объектива | 1,00 | 0,50 |
| Лазер | 1,00 | 0,80 |
| Пластиковые детали | 3,00 | 2,00 |
| Крепежные детали | 0,00 | 1,00 |
| Сборка | 0,00 | 20,00 |
| Итого: | 45,50 | 54,80 |
В первой колонке — во сколько дальномер обошелся мне, во второй — сколько он мог бы стоить при промышленном изготовлении (оценка очень приблизительная).
Программная часть дальномера
Перед написанием программы нужно рассчитать тактовую частоту, на которой будет работать фотоприемная линейка.
В старых версиях дальномера частота сканирования была ограничена 3 Гц, в новом дальномере я решил сделать ее выше — 6Гц (это учитывалось при выборе линейки). Дальномер делает 360 измерений на один оборот, так что при указанной скорости он должен быть способен производить 2160 измерений в секунду, то есть одно измерение должно занимать менее 460 мкс. Каждое измерение состоит из двух этапов — экспозиция (накопление света линейкой) и считывание данных с линейки. Чем быстрее будет произведено считывание сигнала, тем длиннее может быть время экспозиции, а значит, и тем больше будет амплитуда сигнала. При тактовой частоте линейки 8 МГц время считывания 1024 пикселей будет составлять 128 мкс, при 6 МГц — 170 мкс.
При тактовой частоте микроконтроллера серии STM32F303 в 72 МГц максимальная частота выборок АЦП — 6 MSPS (при разрядности преобразования 10 бит). Так как я хотел проверить работу дальномера при тактовой частоте линейки 8 МГц, я решил использовать режим работы АЦП, в котором два АЦП работают одновременно (Dual ADC mode — Interleaved mode). В этом режиме по сигналу от внешнего источника начала запускается ADC1, а затем, через настраиваемое время, ADC2:
Так как я хотел проверить работу дальномера при тактовой частоте линейки 8 МГц, я решил использовать режим работы АЦП, в котором два АЦП работают одновременно (Dual ADC mode — Interleaved mode). В этом режиме по сигналу от внешнего источника начала запускается ADC1, а затем, через настраиваемое время, ADC2:
Как видно из диаграммы, суммарная частота выборок АЦП в два раза выше, чем частота триггера (в данном случае это сигнал от таймера TIM1).
При этом TIM1 также должен формировать сигнал тактовой частоты для фотоприемной линейки, синхронный с выборками АЦП.
Чтобы получить с одного таймера два сигнала с частотами, различающимися в два раза, можно переключить один из каналов таймера в режим TIM_OCMode_Toggle, а второй канал должен формировать обычный ШИМ сигнал.
Структурная схема программы дальномера:
Ключевой частью программы является именно захват данных с линейки и управление ей. Как видно из схемы, этот процесс идет на аппаратном уровне, за счет совместной работы TIM1, ADC1/2 и DMA. Для того, чтобы время экспозиции линейки было постоянным, используется таймер TIM17, работающий в режиме Single Pulse.
Для того, чтобы время экспозиции линейки было постоянным, используется таймер TIM17, работающий в режиме Single Pulse.
Таймер TIM3 генерирует прерывания при срабатывании компаратора, соединенного с энкодером. За счет этого рассчитывается период вращения сканирующей головки дальномера и ее положение. По полученному периоду вращения рассчитывается период таймера TIM16 таким образом, чтобы он формировал прерывания при повороте головки на 1 градус. Именно эти прерывания служат для запуска экспозиции линейки.
После того, как DMA передаст все 1024 значения, захваченные ADC, в память контроллера, программа начинает анализ эти данных: сначала производится поиск положения максимума сигнала с точностью до пикселя, затем, при помощи алгоритма поиска центра тяжести — с более высокой точностью (0.1 пикселя). Полученное значение сохраняется в массив результатов. После того, как сканирующая головка сделает полный оборот, в момент прохождения нуля этот массив предаются в модуль UART при помощи еще одного канала DMA.
Использование дальномера
Качество работы этого дальномера, как предыдущих, проверялось при помощи самописной программы. Ниже пример изображения, формируемого этой программой в результате работы дальномера:
Однако дальномер делался не для того, чтобы просто лежать на столе — он был установлен на старый пылесос Roomba 400 вместо дальномера второй версии:
Также на роботе установлен компьютер Orange Pi PC, предназначенный для управления роботом и связи с ним.
Как оказалось, из-за большой просадки напряжения на линейном источнике питания двигателя дальномера, для работы на скорости 6 об/сек дальномеру требуется питающее напряжение 6В. Поэтому Orange Pi и дальномер питаются от отдельных DC-DC преобразователей.
Для управления роботом и анализа данных от дальномера я использую ROS.
Данные от дальномера обрабатываются специальным ROS-драйвером (основанном на драйвере дальномера Neato), который получает по UART данные от дальномера, пересчитывает их в расстояния до объектов (используя данные калибровки) и публикует их в стандартном формате ROS.
Вот так выглядит полученная информация в rviz (программа для визуализации данных ROS), робот установлен на полу:
Длина стороны клетки — 1 метр.
После того, как данные попали в ROS, их можно обрабатывать, используя уже готовые пакеты программ. Для того, чтобы построить карту квартиры, я использовал hector_slam. Для справки: SLAM — метод одновременного построения карты местности и определения положения робота на ней.
Пример получившейся карты квартиры (форма несколько необычна, потому что дальномер “видит” мебель, а не стены, и не все комнаты показаны):
ROS позволяет объединять несколько программ (“узлов” в терминологии ROS), работающих на разных компьютерах, в единую систему. Благодаря этому, на Orange Pi можно запускать только ROS-драйверы Roomba и дальномера, а анализ данных и управление роботом вести с другого компьютера. При этом эксперименты показали, что hector_slam нормально работает и на Orange Pi, приемлемо загружая процессор, так что вполне реально организовать полностью автономную работу робота.
Система SLAM благодаря данным от дальномера позволяет роботу определять свое положение в пространстве. Используя данные о положении робота и построенную карту, можно организовать навигационную систему, позволяющую “направить” робота в указанную точку на карте. ROS содержит в себе пакет программ для решения этой задачи, но, к сожалению, я так и не смог заставить его качественно работать.
Видео работы дальномера:
Более подробное видео построения карты при помощи hector_slam:
Исходные коды программы контроллера
P. S. Также у меня есть проект более простого лидара.
Оптический дальномер своими руками . / Я ищу ответ / НеПропаду
Итак, что же такое дальномер лазерный своими руками? Данное приспособление используется во многих сферах жизни человека. Им еще пользуются геологи и геодезисты. Это устройство можно использовать везде, где требуется произвести замеры расстояния с абсолютной точностью. По этой причине широкую популярность получили лазерные дальномеры, у которых высокие показатели точности и надежности. А можно ли соорудить такое устройство собственными руками?Такой дальномер выполняет измерения благодаря световым потокам. Сигналом выступает электромагнитное излучение, которое окрашено в нужный цвет. Зачастую оно бывает красным. По законам физики скорость света значительно выше скорости звука, поэтому время измерения равного промежутка будет отличаться.
А можно ли соорудить такое устройство собственными руками?Такой дальномер выполняет измерения благодаря световым потокам. Сигналом выступает электромагнитное излучение, которое окрашено в нужный цвет. Зачастую оно бывает красным. По законам физики скорость света значительно выше скорости звука, поэтому время измерения равного промежутка будет отличаться.
Устройство лазерного дальномера.
Калибровка дальномера
Из картона вырезается треугольник с основанием три дюйма и высотой восемь дюймов. От окна или другого источника света откладывается наименьшая дистанция, указанная на фокусировочной шкале вашей камеры, и измеряющий становится на данную точку лицом к свету. Треугольник нужно держать напротив окна перед глазами на расстоянии вытянутой руки, используя естественное мышечное усилие, которое могло бы быть воспроизведено по желанию. Сфокусировав глаза на окне, вы убедитесь, что треугольник кажется сдвоенным, поскольку каждый глаз смотрит на него со своей собственной точки зрения. Продолжая удерживать фокус на окне, можно приложить прямую линейку поперёк треугольника, параллельно его основанию, так, чтобы она пересекала края каждого из двух мнимых треугольников в точке их взаимного пересечения. Наконец по линейке проводится линия. Этим завершается калибровка для данной дистанции.
Продолжая удерживать фокус на окне, можно приложить прямую линейку поперёк треугольника, параллельно его основанию, так, чтобы она пересекала края каждого из двух мнимых треугольников в точке их взаимного пересечения. Наконец по линейке проводится линия. Этим завершается калибровка для данной дистанции.
Полная фокусировочная шкала вашей камеры наносится на картонный треугольник точно таким же способом: отступая от окна на соответствующее расстояние, определяют, где пересекаются два мнимых треугольника и проводят горизонтальную линию через это пересечение. Точность дальномера убывает с увеличением дистанции, но точно так же убывает и необходимость в критическом фокусе. Прилагающиеся рисунки показывают, как выглядит завершённый дальномер и каким он кажется, когда глаза сфокусированы на точке за ним.
| Рис. 1 Дальномер (для глаз и руки автора). | Рис. 2 Вид дальномера, когда глаза сфокусированы на предмете за ним. |
Сборка: практические рекомендации
Структурная схема импульсного лазерного дальномера.
Чтобы изготовить дальномер своими руками можно за основу взять схему лазерной связи. В данном случае передача данных происходит очень быстро, скорость равна 10 Мбит. Такая величина соответствует имеющейся частоте модуляции.
Для такого лазерного устройства берется самый простой усилитель мощности. Он состоит из одной микросхемы 74HC04, которая собрана из шести инверторов. Подача тока ограничивается специальными резисторами. Однако умельцы могут заменить резисторы более надежными деталями.
Пусконаладочная плата становится источником 5-вольтового напряжения. Таким образом усилитель получает питание. Чтобы убрать наводки сигнала на другую часть электрической схемы, усилительный корпус делается стальным, каждый провод экранируется.
В качестве лазера выступает привод, установленный в DVD-приставках. Такое устройство имеет вполне достаточную мощность для функционирования на частоте, достигающей 10 МГц.
В состав приемника входит:
В состав усилителя входит полевой транзистор, специальная микросхема. Когда увеличивается расстояние, происходит падение освещенности фотодиода. Поэтому необходимо иметь мощное усиление. Собираемая схема позволяет достичь 4000 единиц.
Когда увеличивается расстояние, происходит падение освещенности фотодиода. Поэтому необходимо иметь мощное усиление. Собираемая схема позволяет достичь 4000 единиц.
Когда увеличивается частота, начинают уменьшаться сигналы фотодиода. Усилитель подобной конструкции является главной и сильно уязвимой частью. Его настройка требует очень высокой точности. Желательно отрегулировать коэффициент усиления таким образом, чтобы получать максимальные значения. Самым простым способом будет подача на транзистор 3 В. Можно установить обыкновенную батарейку.
Чтобы приемник начал работать, необходимо подать 12 В. Для этого устанавливается специальный блок питания.
У такого усилителя высокая чувствительность к любым наводкам, поэтому его нужно обязательно экранировать. Можно для этого воспользоваться корпусом оптического датчика. Экранирование фотодиода можно сделать из обычной фольги.
Описанная выше система позволит создать самодельный лазерный дальномер в бытовых условиях.
Как пользоваться дальномером
При практическом использовании шкала удерживается вертикально на расстоянии вытянутой руки, в то время как глаза сфокусированы на значимой части сцены. Ноготь большого пальца скользит вверх по шкале до видимого пересечения двух треугольников, после чего взгляд можно перевести на треугольник, чтобы увидеть, какую линию отмечает ноготь, и сфокусировать камеру в соответствии с полученным значением. Казалось бы, ничего не может быть проще, однако существуют некоторые досадные помехи, о которых нельзя забывать.
Ноготь большого пальца скользит вверх по шкале до видимого пересечения двух треугольников, после чего взгляд можно перевести на треугольник, чтобы увидеть, какую линию отмечает ноготь, и сфокусировать камеру в соответствии с полученным значением. Казалось бы, ничего не может быть проще, однако существуют некоторые досадные помехи, о которых нельзя забывать.
Наши глаза обманывают нас. Иногда нам кажется, что мы смотрим точно на объект, но на самом деле наши глаза сфокусированы на точке в воздухе. Средство от этого – сделать несколько считываний достаточно быстро, не давая глазам времени уставать или колебаться. Повторяйте до получения согласующихся результатов. Также следует помнить, что глазной зрачок это не точка, и его размер при ярком освещении, не таков, как при тусклом. Вследствие этого, на дальнем конце шкалы возникает определённый недостаток точности, и при чтении со шкалы приходится использовать приблизительно ту же яркость, что и при калибровке. Этот эффект уменьшается, если производить калибровку при умеренно ярком освещении, а непосредственно перед считыванием посмотреть на свет такой же интенсивности.
Математическое отношение и обоснование для данного прибора показаны на рис. 3, и, как можно увидеть, расстояние между глазами весьма существенно для больших расстояний. Смысл в том, что если шкала откалибрована в светлой комнате и используется также в светлой комнате, расстояние между глазами не меняется. Меж тем, в тёмных местах глазной зрачок расширяется, преувеличивая, таким образом, одни значения и преуменьшая другие.
Другой источник нестабильности, а именно трудность удерживания шкалы всегда на одном и том же расстоянии, очень легко преодолевается посредством очень небольшой практики, использованием естественного положения и комфортного мышечного усилия. Погрешности в удерживании треугольника особенно значимы на ближних дистанциях.
Это устройство не приспособлено для коммерческого производства, поскольку оно должно соответствовать определённой паре глаз и конкретной руке. Оно ничего не стоит и может быть изготовлено за полчаса, но при использовании с должным вниманием, оно превращает пару зорких глаз в отличный дальномер, который не требует себе оправдания. Продолжительное использование этого прибора в процессе фотографирования играющих детей с близкого расстояния и при открытой диафрагме позволило получить множество вполне удовлетворительных негативов и продемонстрировало полезность устройства.
Продолжительное использование этого прибора в процессе фотографирования играющих детей с близкого расстояния и при открытой диафрагме позволило получить множество вполне удовлетворительных негативов и продемонстрировало полезность устройства.
Рис.3 Кривые, показывающие зависимость длины меток на шкале от расстояния до объекта при длине руки 27 дюймов и различных расстояниях между глазами. CD – длина линии на шкале в дюймах. BE – расстояние от глаз до объекта в футах. AB – расстояние между глазами в дюймах.
***
Классификация приборов для определения дальности
Когда и где появились первые измерители дальности? Впервые в продаже это приспособление вышло в 1992 году на Западе, но его стоимость доходила до нескольких тысяч долларов. И только спустя четыре года эти устройства стали доступны более широкому кругу пользователей. Затем уже многие фирмы стали работать в данном направлении. А сегодня разновидностей этого инструмента довольно много, самые точные используют принцип лазера в работе, известной моделью считается дальномер лейка (Leica), в ассортименте имеются и другие приборы похожего назначения, например, геодезические рулетки на лазерах.
В чем же заключается принцип действия? Модели активного типа измеряют расстояние при помощи времени, затраченного посланным сигналом на прохождение пути до объекта и обратно. Скорость, с которой данный сигнал распространяется, предварительно, естественно, известна (звуковая и световая скорость). Определение расстояния с помощью пассивных вариантов прибора основано на вычислении высоты равнобедренного треугольника. Активные делят на три типа: звуковые, световые, лазерные. А пассивные на два: оптические и нитяные.
Послесловие переводчика
Нельзя не отдать должное изобретательности автора, хотя литературная сторона статьи, конечно, оставляет желать.
Мне не вполне ясно, каким образом изменение размера зрачка может влиять на расстояние между зрачками. Очевидно, автор подразумевает не расстояние между центрами зрачков, а скорее расстояние между их медиальными краями. По-моему это не совсем правильно. В конце концов, оптическая ось глаза проходит именно через центр зрачка, а потому для наших целей важно именно расстояние между центрами зрачков, которое не зависит от их диаметра. Правда, при расширении зрачка (мидриазе) происходит уменьшение глубины резко изображаемого пространства, в результате чего объекты не в фокусе (в том числе сдвоенный треугольник дальномера) будут выглядеть несколько более размытыми. Это немного снижает точность измерения, но не настолько, чтобы этому факту стоило уделять особое внимание.
Правда, при расширении зрачка (мидриазе) происходит уменьшение глубины резко изображаемого пространства, в результате чего объекты не в фокусе (в том числе сдвоенный треугольник дальномера) будут выглядеть несколько более размытыми. Это немного снижает точность измерения, но не настолько, чтобы этому факту стоило уделять особое внимание.
| Рис.4 Примерно так выглядит метрический дальномер. |
Прецезионность калибровки дальномера эмпирическим путём, т.е. буквально на глаз, также вызывает у меня определённые сомнения. Слишком уж неточен метод измерения (особенно для дальних дистанций), чтобы применять его при разметке эталонной шкалы. На мой взгляд, расположение горизонтальных меток на шкале дальномера лучше рассчитать. Я даже придумал алгоритм, который способен облегчить эту задачу. Всё что вам нужно, это попросить кого-нибудь измерить расстояние между центрами ваших зрачков (глаза при этом должны смотреть вдаль), а также расстояние от глаз до шкалы дальномера, удерживаемого в вытянутой руке, после чего подставить полученные цифры в соответствующие ячейки формы и нажать на кнопку «Построить таблицу». Для каждой дистанции вы получите высоту соответствующей горизонтальной метки, считая от снования треугольника, а также её длину (отрезок CD на рисунке 3). Все величины, само собой разумеется, метрические.
Для каждой дистанции вы получите высоту соответствующей горизонтальной метки, считая от снования треугольника, а также её длину (отрезок CD на рисунке 3). Все величины, само собой разумеется, метрические.
Ремонт лазерного уровня: распространенные поломки
Чиню дальномеры этой модели в пятый раз… Так как первое образование «слесарь контрольно измерительных приборов и аппаратуры. Вообще, приборчик достаточно надежный и очень точный. Точнее пожалуй только некоторые модели Hilti и Leica. Но…суровая действительность вносит свои НО. Если говорить именно про DLE 50…то проблемы с ним могут начаться после падения. И тут ничего удивительного нет.
e2e06 дальномер, в надежде что отошел шлейф но уже не уверен что в Re: ремонт лазерного дальномера купить новый.
Стоит ли покупать лазерную рулетку?
Достоверное измерение расстояний — это обязательная операция, сопровождающая любой ремонт квартиры своими руками либо с привлечением бригады строителей. Она влияет на качество работы, позволяет точно определить количество необходимых материалов, рассчитать стоимость конечных финансовых затрат. Материал нашей статьи посвящен обычной и лазерной рулетке для домашнего мастера, технологиям точного измерения размеров строительных элементов, определения их геометрии с поясняющими картинками, схемами и видео. На его основе вы сможете сделать выбор прибора измерения расстояний: пользоваться дальше простой измерительной лентой или приобрести современный лазерный уровень — дальномер со множеством функций, облегчающих повседневную работу профессионального строителя. Рулетка — измерительный прибор, который может потребоваться для замера от случая к случаю или работать постоянно.
Материал нашей статьи посвящен обычной и лазерной рулетке для домашнего мастера, технологиям точного измерения размеров строительных элементов, определения их геометрии с поясняющими картинками, схемами и видео. На его основе вы сможете сделать выбор прибора измерения расстояний: пользоваться дальше простой измерительной лентой или приобрести современный лазерный уровень — дальномер со множеством функций, облегчающих повседневную работу профессионального строителя. Рулетка — измерительный прибор, который может потребоваться для замера от случая к случаю или работать постоянно.
Лазерные дальномеры для работы в помещениях или на небольших дистанциях
Все дальномеры, можно условно разделить на две большие группы. Одни применяют для внутренних работы, другие для внешних. Диапазон измерений, дальномеров, которые предназначены для внутренних измерений как правило, не превышает 100 метров.
Лазерный дальномер для работы в помещениях
Для таких работ могут быть использованы дальномеры, которые используют оба принципа действия.

Ремонт лазерной рулетки своими руками
Подпишитесь на автора, если вам нравятся его публикации. Тогда вы будете получать уведомления о его новых постах. Для написания комментариев, пожалуйста, авторизуйтесь. Вам было отправлено письмо с инструкцией по восстановлению пароля. Если вы не получили письмо в течение 5 минут, проверьте папку спам, попробуйте еще раз. Подпишитесь на автора Подпишитесь на автора, если вам нравятся его публикации. Отписаться от уведомлений вы всегда сможете в профиле автора. Всем привет! Недавно выполнил небольшой, но интересный заказ.
Самодельный лазерный дальномер
На сегодняшний день в робототехнике не так уж и много методов навигации внутри помещений. Определение положения робота в пространстве с использованием лазерного сканера – один из них. Важное достоинство этого метода – он не требует установки в помещении каких-либо маяков. В отличие от систем, использующих распознавание изображения с камер, обработка данных с дальномера не так ресурсоемка. Но есть и недостаток – сложность, и соответственно, цена дальномера.
Но есть и недостаток – сложность, и соответственно, цена дальномера.
Поиск данных по Вашему запросу:
Схемы, справочники, даташиты:
Прайс-листы, цены:
Обсуждения, статьи, мануалы:
Дождитесь окончания поиска во всех базах.
По завершению появится ссылка для доступа к найденным материалам.
Содержание:
- Лазерный дальномер
- Интересный принцип работы лазерного дальномера или как надо пользоваться измерителем
- Все об охоте
- Самодельный фазовый лазерный дальномер. Лазерный дальномер своими руками
- Лазерный дальномер из web камеры
- Как сделать безопасный самодельный 3D-лазерный дальномер
- Дальномер своими руками.
Возможно ли это?
- Самодельный фазовый лазерный дальномер. Лазерный дальномер своими руками
ПОСМОТРИТЕ ВИДЕО ПО ТЕМЕ: Лазерный нивелир своими руками.
Лазерный дальномер
На сегодняшний день в робототехнике не так уж и много методов навигации внутри помещений. Определение положения робота в пространстве с использованием лазерного сканера – один из них. Важное достоинство этого метода – он не требует установки в помещении каких-либо маяков. В отличие от систем, использующих распознавание изображения с камер, обработка данных с дальномера не так ресурсоемка. Но есть и недостаток – сложность, и соответственно, цена дальномера.
Традиционно в робототехнике используются лазерные сканеры, использующие фазовый или времяпролетный принцип для измерения расстояния до объектов. Реализация этих принципов требует довольно сложной схемотехники и дорогих деталей, хотя и характеристики при этом получаются приличные – используя эти принципы, можно добиться высокой скорости сканирования и большой дальности измерения расстояния. На помощь приходят дальномеры, использующие триангуляционный принцип измерения расстояния. Дальномер такого типа впервые появился в роботах-пылесосах Neato:.
Реализация этих принципов требует довольно сложной схемотехники и дорогих деталей, хотя и характеристики при этом получаются приличные – используя эти принципы, можно добиться высокой скорости сканирования и большой дальности измерения расстояния. На помощь приходят дальномеры, использующие триангуляционный принцип измерения расстояния. Дальномер такого типа впервые появился в роботах-пылесосах Neato:.
Довольно быстро любители расшифровали протокол этого дальномера, и начали использовать его в своих проектах. Через несколько лет китайская компания смогла выпустить сканирующий дальномер RPLIDAR, который поставлялся как полноценный прибор, а не запчасть.
Как только я узнал о дальномерах Neato, мне захотелось собрать самому аналогичный. В конце концов, мне это удалось, и процесс сборки я описал на Робофоруме. Первая версия дальномера:. Позже я сделал еще одну версию дальномера, более пригодную для использования на реальном роботе, но и ее качество работы не полностью устроило меня.
Настало время третьей версии дальномера, и именно она будет описана далее. Принцип измерения расстояния до объекта основан на измерении угла между лазерным лучом, попадающим на объект, и объективом дальномера. Зная расстояние лазер-объектив h и измеренный угол, можно вычислить расстояние до объекта – чем меньше угол, тем больше расстояние. Принцип хорошо иллюстрирует картинка из статьи :. Таким образом, ключевые оптические компоненты такого дальномера – лазер, объектив и фотоприемная линейка.
Так как дальномер сканирующий, то все эти детали, а так же управляющая электроника устанавливаются на вращающейся головке. Тут может возникнуть вопрос – зачем нужно вращать оптику и электронику, ведь можно установить вращающееся зеркало? Проблема в том, что точность дальномера зависит от расстояния между объективом и лазером базового расстояния , так что оно должно быть достаточно большим. Соответственно, для кругового сканирования понадобится зеркало диаметром, большим базового расстояния.
Дальномер с таким зеркалом получается достаточно громоздким. Сканирующая головка дальномера при помощи подшипника закрепляется на неподвижном основании. На нем же закрепляется двигатель, вращающий головку. Также в состав дальномера должен входить энкодер, предназначенный для получения информации о положении головки. Самое сложное в самодельном дальномере – изготовление механической части.
Именно ее работа вызывала у меня больше всего нареканий в ранних версиях дальномера. Сложность заключается в изготовлении сканирующей головки, которая должна быть прочно закреплена на подшипнике, вращаться без биений и при этом не нее нужно каким-то образом передавать электрические сигналы.
Во второй версии дальномера первые две проблемы я решил, использовав части старого HDD – сам диск использовался как основание сканирующей головки, а двигатель, на котором он закреплен, уже содержал качественные подшипники. В то же время, при этом возникла третья проблема – электрические линии можно было провести только через небольшое отверстие в оси двигателя.
Мне удалось сделать самодельный щеточный узел на 3 линии, закрепленный в этом отверстии, но получившаяся конструкция получилась шумной и ненадежной. При этом возникла еще одна проблема – линии, чтобы пробросить сигнал энкодера, не было, и датчик энкодера в такой конструкции должен быть установлен на головке, а диск энкодера с метками – на неподвижном основании. Диск энкодера получился не жестким, и это часто вызывало проблемы.
Фотография второй версии дальномера:. Еще один недостаток получившегося дальномера – низкая скорость сканирования и сильное падение точности на расстояниях больше 3м. Именно эти недостатки я решил устранить в третьей версии дальномера. В принципе, электронная часть триангуляционного дальномера достаточно проста и содержит всего два ключевых компонента -светочувствительную линейку и микроконтроллер. Если с выбором контроллера проблем нет, то с линейкой все значительно сложнее.
Светочувствительная линейка, используемая в подобном дальномере, должна одновременно иметь достаточно высокую световую чувствительность, позволять считывать сигнал с высокой скоростью и иметь маленькие габариты.
Различные CCD линейки, применяемые в бытовых сканерах, обычно довольно длинные. Линейки, используемые в сканерах штрихкодов – тоже не самые короткие и быстрые.
Эти линейки хорошо подходят по размеру, они дешевые, но содержат всего пикселей. Для точного измерения расстояния до 3 метров этого мало, и спасает только возможность субпискельного анализа изображения. В третьей версии дальномера я решил использовать линейку ELIS Однако купить ее оказалось непросто.
У основных поставщиков электроники этих линеек просто нет. Первая линейка, которую я смог купить на Taobao, оказалась нерабочей.
Обе линейки выглядели паянными – обе имели облуженные контакты и, судя по маркировке, были изготовлены в году. Причем даже на фотографиях у большинства китайских продавцов линейки именно такие. Похоже, что действительно новую линейку ELIS можно купить только напрямую у производителя. Светочувствительная линейка ELIS, как следует из названия, содержит пикселя.
Она имеет аналоговый выход, и достаточно просто управляется. При сходных размерах, она содержит пикселей и имеет цифровой выход. Так как я решил использовать линейку с аналоговым выходом сигнала, то микроконтроллер дальномера должен содержать достаточно быстрый АЦП. Поэтому я решил использовать серию контроллеров – STM32F, которые, при относительно небольшой стоимости, имеют несколько быстрых АЦП, способных работать одновременно.
При сходных размерах, она содержит пикселей и имеет цифровой выход. Так как я решил использовать линейку с аналоговым выходом сигнала, то микроконтроллер дальномера должен содержать достаточно быстрый АЦП. Поэтому я решил использовать серию контроллеров – STM32F, которые, при относительно небольшой стоимости, имеют несколько быстрых АЦП, способных работать одновременно.
В результате у меня получилась такая схема: Сигнал с линейки вывод 10 имеет достаточно высокий уровень постоянной составляющей, и ее приходится отфильтровывать при помощи разделительного конденсатора.
Далее сигнал нужно усилить – для этого используется операционный усилитель AD Далеко расположенные объекты дают достаточно слабый сигнал, так что пришлось установить коэффициент усиления равным Как оказалось в результате экспериментов, даже при отсутствии сигнала, на выходе выбранного ОУ по какой-то причине постоянно присутствует напряжение около 1. Для того, чтобы избавится от этого смещения, мне пришлось подать дополнительное напряжение на инвертирующий вход ОУ.
Плату разводил двухстороннюю, сделать такую плату в домашних условиях качественно довольно сложно, так что заказал изготовление плат в Китае пришлось заказать сразу 10 штук :. В этом дальномере я использовал дешевый объектив с резьбой M12, имеющий фокусное расстояние 16мм. Объектив закреплен на печатной плате при помощи готового держателя объектива такие используются в различных камерах.
Лазер в данном дальномере – инфракрасный нм лазерный модуль, мощностью 3. Изначально я предполагал, что излучение лазера нужно будет модулировать, но позже оказалось, что с используемой линейкой в этом нет смысла, и поэтому сейчас лазер включен постоянно. Для проверки работоспособности электроники была собрана вот такая конструкция, имитирующая сканирующую головку дальномера:. Уже в таком виде можно было проверить, какую точность измерения расстояния позволяет обеспечить дальномер.
Для анализа сигнала, формируемого линейкой, были написаны тестовые программы для микроконтроллера и ПК. Пример вида сигнала с линейки объект на расстоянии 3 м. Изначально схема была не совсем такая, как приведена выше. В ходе экспериментов мне пришлось частично переделать изначальную схему, так что, как видно из фотографий, некоторые детали пришлось установить навесным монтажом. После того, как электроника была отлажена, настало время изготовить механическую часть.
Изначально схема была не совсем такая, как приведена выше. В ходе экспериментов мне пришлось частично переделать изначальную схему, так что, как видно из фотографий, некоторые детали пришлось установить навесным монтажом. После того, как электроника была отлажена, настало время изготовить механическую часть.
В этот раз я не стал связываться с механикой из HDD, и решил изготовить механические детали из жидкого пластика, заливаемого в силиконовую форму. Эта технология подробно описана в Интернете, в том числе и на Гиктаймс. Уже после того, как я изготовил детали, стало понятно, что изготовить детали на 3D принтере было бы проще, они могли выйти тверже, и возможно, можно было бы сделать одну деталь вместо двух.
Доступа к 3D принтеру у меня нет, так что пришлось бы заказывать изготовление детали в какой-либо компании. Фото одной из деталей сканирующей головки дальномера:. Эта деталь является основой головки. Она состоит из втулки, на которую позже надевается подшипник, и диска. Диск предназначен для крепления второй детали башни, кроме того, на него снизу наклеивается диск энкодера.
Диск предназначен для крепления второй детали башни, кроме того, на него снизу наклеивается диск энкодера.
Втулка и диск содержат сквозное отверстие, в которое вставляется покупной щеточный узел на 6 линий – его видно на фотографии. Именно те провода, что видны на фотографии, могут вращаться относительно корпуса этого узла. Оставшиеся 2 линии используются для передачи напряжения питания и сигнала энкодера. Вторая деталь сканирующей головки была изготовлена тем же способом.
Она предназначена для крепления печатной платы и лазера к диску. К сожалению, фотографий изготовления этой детали у меня не сохранилось, так что ее можно увидеть только в составе дальномера.
Для крепления сканирующей головки к основанию дальномера используется шариковый подшипник. Я использовал дешевый китайский подшипник ZZ. Честно говоря, качество подшипника мне не понравилось – ось его внутренней втулки могла отклонятся относительно оси внешней на небольшой угол, из-за чего головка дальномера тоже немного наклоняется. Крепление подшипника к детали с диском и основанию будет показано ниже.
Крепление подшипника к детали с диском и основанию будет показано ниже.
Основание я сделал из прозрачного оргстекла толщиной 5 мм. К основанию крепится подшипник, датчик энкодера, двигатель дальномера и маленькая печатная плата. Само основание устанавливается на любую подходящую поверхность при помощи стоек. Вот так выглядит основание дальномера снизу: Печатная плата содержит регулируемый линейный стабилизатор напряжения для питания двигателя, и площадки для подключения проводов узла щеток.
Сюда же подводится питание дальномера. Как и в других дальномерах, двигатель вращает сканирующую головку при помощи пассика.
Интересный принцип работы лазерного дальномера или как надо пользоваться измерителем
Итак, что же такое дальномер лазерный своими руками? Данное приспособление используется во многих сферах жизни человека. Им еще пользуются геологи и геодезисты. Это устройство можно использовать везде, где требуется произвести замеры расстояния с абсолютной точностью.
Есть отечественные мастера, которые создают лазерный дальномер своими руками. Самодельный прибор используют в бытовых.
Все об охоте
Сайт помогает найти что-нибудь интересное в огромном ассортименте магазинов и сделать удачную покупку. Если Вы купили что-то полезное, то, пожалуйста, поделитесь информацией с другими. Также у нас есть DIY сообщество , где приветствуются обзоры вещей, сделанных своими руками. Продолжаем обслуживать старый хьюлет. Идеальный номер два? Ожившая классика. Please click here if you are not redirected within a few seconds. Зарегистрироваться Логин или эл. Напомнить пароль Пароль. Войти Запомнить меня.
Самодельный фазовый лазерный дальномер. Лазерный дальномер своими руками
Широко применяется в инженерной геодезии , при топографической съёмке , в военном деле , в навигации , в астрономических исследованиях, в фотографии [ источник не указан дней ]. Современные лазерные дальномеры в большинстве случаев компактны и позволяют в кратчайшие сроки и с большой точностью определить расстояния до интересующих объектов. Импульсный лазерный дальномер — это устройство, состоящее из импульсного лазера и детектора излучения. Измеряя время, которое затрачивает луч на путь до отражателя и обратно, и зная значение скорости света , можно рассчитать расстояние между лазером и отражающим объектом.
Импульсный лазерный дальномер — это устройство, состоящее из импульсного лазера и детектора излучения. Измеряя время, которое затрачивает луч на путь до отражателя и обратно, и зная значение скорости света , можно рассчитать расстояние между лазером и отражающим объектом.
Войдите , пожалуйста.
Лазерный дальномер из web камеры
Ибо сейчас это просто куча upd, и нифига не понятно, что ты там наменял. Кстати, как считаешь, может стоит тебе записать ролик для подписчиков по основам работы с гитом? Многим было бы полезно. Вчера видел этот видос на канале – не глядя шлёпнул минус. Хотел возмутиться, что пиздить видосики с ютуба и постить на пикабу – много ума не надо. Оказывается много ума не надо, чтобы лепить минусы не задумываясь.
Как сделать безопасный самодельный 3D-лазерный дальномер
Сайт помогает найти что-нибудь интересное в огромном ассортименте магазинов и сделать удачную покупку. Если Вы купили что-то полезное, то, пожалуйста, поделитесь информацией с другими. Также у нас есть DIY сообщество , где приветствуются обзоры вещей, сделанных своими руками. Продолжаем обслуживать старый хьюлет. Идеальный номер два? Ожившая классика.
Также у нас есть DIY сообщество , где приветствуются обзоры вещей, сделанных своими руками. Продолжаем обслуживать старый хьюлет. Идеальный номер два? Ожившая классика.
Хочу собрать фазовый лазерный дальномер. Дальность около пары метров, а точности в 1 сантиметр. В качестве теоретической.
Дальномер своими руками.Возможно ли это?
Я пытаюсь создать простой самодельный 3D-лазерный дальномер, используя общий линейный лазер и ИК-камеру, аналогичную описанной ниже настройке here. Линейный лазер и камера обнаруживали бы глубину в двух измерениях. Затем я смонтировал их на сервоприводе, чтобы подметать его под углом, чтобы отслеживать третье измерение.
Самодельный фазовый лазерный дальномер. Лазерный дальномер своими руками
Имеется лазерный источник света и матрица цветной камеры , расположенные на небольшом расстоянии друг от друга под некоторым определенным углом. Причем матрица расположена т. На рисунке она названа зоной измерений. Диапазон этой зоны выбирается согласно требований. На цели 1 при наведении на нее лазера появится яркое красное пятно.
На цели 1 при наведении на нее лазера появится яркое красное пятно.
СБ c до
Тема в разделе ” Посоветуйте детальки “, создана пользователем Roman Koff , 6 июн Войти или зарегистрироваться. Искать только в заголовках Сообщения пользователя: Имена участников разделяйте запятой. Новее чем: Искать только в этой теме Искать только в этом разделе Отображать результаты в виде тем. Быстрый поиск. Лазерный дальномер для arduino Тема в разделе ” Посоветуйте детальки “, создана пользователем Roman Koff , 6 июн Существуют ли подобные модули, или можно как-то собрать подобный девайс из обычного лазерного дальномера?
Посоветуйте за разумные деньги датчик лазерный дальномер. Немного удивлён тем что полно в продаже дальномеров в виде готового приборчика с дисплеем, аккумулятором и т. Или не там ищу? Не разбирать же
Лазерный дальномер | Хакадей
13 марта 2022 г., Дэйв Раунтри
Те, кто используется родом из Великобритании, могут быть хорошо знакомы с истребителем Tornado Королевских ВВС, который был разработан для участия в теоретической ядерной войне и служил стране более 40 лет. Эта летающая смертельная ловушка (слова настоящего летчика-истребителя Королевских ВВС, которого этот писец встретил несколько лет назад) была чрезвычайно сложной машиной с самыми современными технологиями для своего времени, но, по-видимому, имела привычку взрываться. иногда загорается в воздухе!
Эта летающая смертельная ловушка (слова настоящего летчика-истребителя Королевских ВВС, которого этот писец встретил несколько лет назад) была чрезвычайно сложной машиной с самыми современными технологиями для своего времени, но, по-видимому, имела привычку взрываться. иногда загорается в воздухе!
Как бы то ни было, последний флот уже давно выведен из эксплуатации, и часть технологий внутри него начинает просачиваться в общественное достояние, поскольку некоторые части можно купить на eBay во всех местах. [Майк] из mikeselectricstuff копался внутри лазерной головной части «Торнадо», которая была частью ракетной подсистемы бомбардировщика с лазерным наведением, и, боже, какое это путешествие, связанное с механикой и электроникой!
Импульсный YAG-лазер с оптической накачкой Этот блок в значительной степени тупой, со всеми умными вещами, происходящими глубоко в отсеке авионики, но все еще демонстрирует множество старых высокотехнологичных технологий. Используя лазер на иттрий-алюминиевом гранате (ИАГ) с накачкой ксеноновой трубкой, работающий в импульсном режиме, задача устройства состоит в том, чтобы освещать наземную цель ИК-пятном, на которое впоследствии будут наведены ракеты.
Лазерная головка, предназначенная для слежения за землей, когда самолет движется на скорости, имеет три степени момента, которые, вероятно, синхронизируются с движением самолета, чтобы луч оставался стабильным. Оптический пакет весьма интересен: ксеноновая трубка и стержень YAG плавают в ванне с жидкостным охлаждением внутри металлического корпуса. Луч отражается внутри корпуса с помощью множества призм и стробируется с помощью переключателя добротности, который позволяет наращивать интенсивность луча, прежде чем он попадет в цель. Также следует отметить самый большой фотодиод, который мы когда-либо видели — чуть больше дюйма в диаметре, разделенный на четыре квадранта, что позволяет датчику определять изменения направления в отраженном ИК-пятне и отслеживать его ошибку. Отдельный фотодиодный приемник входит в состав времяпролетного оптического дальномера, что также является важной информацией при наведении на цель.
Множество необычных 3-фазных моторов позиционирования, датчиков положения и гироскопов в сочетании с прекрасно выполненными и подключенными военными характеристиками. Это определенно открывает глаза на то, что действительно было возможно в годы холодной войны, даже если такая технология никогда не применялась в гражданских целях.
Это определенно открывает глаза на то, что действительно было возможно в годы холодной войны, даже если такая технология никогда не применялась в гражданских целях.
Мы уже видели кое-что о «Торнадо», например, этот сложнейший авиагоризонт, а вот внутренности старого самолета QAR (устройство записи быстрого доступа)
Продолжить чтение «Красивая техника в этом лазерном устройстве от реактивного истребителя Tornado» →
Posted in Teardown, Weapons HacksTagged лазерный дальномер, оптический, фотодиод, разборка, торнадо, лазер YAG22 мая 2018 г. Том Нарди
Когда появляется новая технология, цена, как правило, настолько высока, что она отпугивает всех, кроме стойких приверженцев первопроходцев. Но со временем цены снижаются настолько, что все больше людей готовы покупать, что затем приводит к еще большему снижению цен, пока в конце концов не начинает действовать эффект масштаба, и вещь не становится настолько дешевой, что покупка становится почти импульсивной.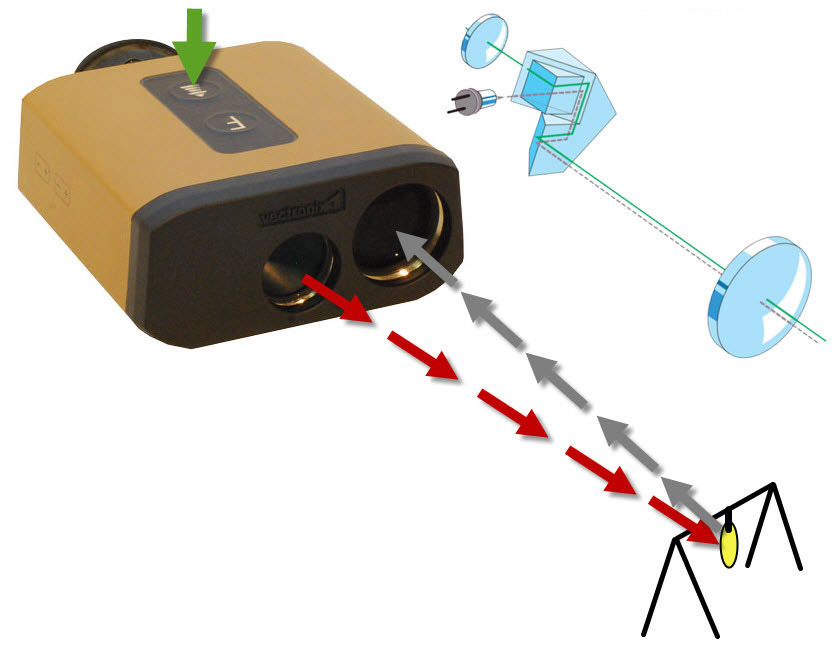 Linux SBC, лазеры Blu-ray, 3D-принтеры; вы называете это, и хакерское сообщество, вероятно, выиграло от того, что это не просто заинтересованное хакерское сообщество.
Linux SBC, лазеры Blu-ray, 3D-принтеры; вы называете это, и хакерское сообщество, вероятно, выиграло от того, что это не просто заинтересованное хакерское сообщество.
Именно это и начало происходить с лазерными дальномерами. Когда-то почти исключительно военная технология, теперь вы можете купить базовую «лазерную рулетку» менее чем за 40 долларов США у обычных зарубежных поставщиков. К сожалению, как обнаружил [илиасам], они не особенно хорошо подходят для других задач. Во-первых, нет официального способа получить данные из устройства, но другая проблема заключается в том, что частота дискретизации составляет менее одного раза в секунду. Полагая, что само оборудование достаточно многообещающее, он решил перепроектировать и заменить прошивку, работающую на одном из этих дешевых лазерных дальномеров (Google Translate с русского).
Его запись в блоге содержит огромное количество информации о том, как работают эти устройства, и ее должен прочитать каждый, кто интересуется обратным проектированием. Но вкратце: он нашел способ перепрограммировать микроконтроллер STM32F100C8T6, используемый в устройстве, и разработать собственную прошивку, которая решает проблемы удобства использования этого многообещающего гаджета.
Но вкратце: он нашел способ перепрограммировать микроконтроллер STM32F100C8T6, используемый в устройстве, и разработать собственную прошивку, которая решает проблемы удобства использования этого многообещающего гаджета.
Незначительными прыжками с обруча печатную плату лазерной рулетки можно подключить к программатору ST-Link, а микропрограмму, предоставленную [iliasam], можно использовать для обеспечения простого в использовании последовательного интерфейса. Идеально подходит для сопряжения с Arduino или Raspberry Pi, чтобы быстро и точно получать данные о дальности без больших затрат.
Вероятно, вас не удивит, что это уже не первый случай, когда [илиасам] замарает лазерный дальномер. Эта чрезвычайно впечатляющая сборка прошлого года позволила сделать невероятно точное 3D-сканирование его комнаты, а до этого он с нуля создал свой собственный дальномер.
Читать далее «Взлом дешевого лазерного дальномера» →
Posted in Laser Hacks, Tool HacksTagged лазерный дальномер, реверс-инжиниринг, st-link, STM32F100 22 сентября 2016 г. Стивен Дюфрен
Стивен Дюфрен
Конечно, мы можем поставить наших детей спиной к стене, заставить их встать прямо и использовать линейку на их голове, чтобы отметить их рост на стене, но какие мы хакеры? Здесь нет ни одного микроконтроллера или какого-либо электронного компонента! Семья DIY, которая называет себя [HomeMadeGarbage], выстояла и придумала высокотехнологичный инструмент для измерения роста своего ребенка.
Вместо линейки они получили небольшой деревянный ящик для ношения на голове. Под коробкой задним концом вниз смонтировали лазерный дальномер VL53L0X. С диапазоном 2 метра он обязательно будет работать с любым ребенком. Но коробка должна быть установлена ровно на голове ребенка, иначе лазер будет направлен вниз под углом. Чтобы справиться с этим, они поместили в коробку 6-осевой датчик движения MPU6050 вместе с Arduino Nano, чтобы связать все это вместе. ЖК-дисплей, кнопка измерения и светодиод установлены снаружи корпуса на задней стороне.
Чтобы использовать его, родитель надевает коробку на голову ребенка, следя за тем, чтобы лазерный датчик не блокировался и мог видеть пол. ЖК-дисплей показывает высоту, а также ускорение в направлениях x и y. Светодиод горит красным, если ящик стоит неровно, и зеленым, если это так. Удерживая нажатой кнопку измерения, инструмент переходит в режим измерения, и когда он выровнен, светодиод становится синим, а ЖК-дисплей останавливается, чтобы вы могли отметить высоту. Какое-то время у вас все хорошо, в зависимости от возраста вашего ребенка. Посмотрите, как он используется для измерения ребенка после перерыва, а также дополнительный клип, показывающий, как выглядит результат при движении руки вверх и вниз под ним.
ЖК-дисплей показывает высоту, а также ускорение в направлениях x и y. Светодиод горит красным, если ящик стоит неровно, и зеленым, если это так. Удерживая нажатой кнопку измерения, инструмент переходит в режим измерения, и когда он выровнен, светодиод становится синим, а ЖК-дисплей останавливается, чтобы вы могли отметить высоту. Какое-то время у вас все хорошо, в зависимости от возраста вашего ребенка. Посмотрите, как он используется для измерения ребенка после перерыва, а также дополнительный клип, показывающий, как выглядит результат при движении руки вверх и вниз под ним.
Продолжить чтение «Высокотехнологичный инструмент для измерения роста вашего ребенка» →
Posted in Разное ХакиTagged arduino nano, измерение расстояния, лазерный дальномер, измерение, mpu60505 июня 2016 г. Эллиот Уильямс
Яков Смирнов говорил: «В Америке всегда можно найти вечеринку. В Советской России партия находит ВАС!! Только вот это лазерный дальномер.
В этом проекте (автоматический перевод) [илиасам] делает свой собственный сканирующий лазерный дальномер, вроде тех, что мы видели в причудливых пылесосах. Но он делает это с нуля.
В то время как это легко сделать, если у вас есть веб-камера и тонна вычислительной мощности, [iliasam] идет трудным путем — измеряет параллакс отраженного пятна через линзу на линейном датчике изображения ( что в переводе на русский язык означает «линия фотоприемника»).
Линейные датчики изображения очень похожи на элементы вашей цифровой КМОП-камеры, за исключением того, что элементы расположены в линию, а не в плоскости, и их намного проще взаимодействовать с микроконтроллером. Держите линию данных на высоком уровне, чтобы сделать экспозицию, а затем синхронизируйте (аналоговые) значения напряжения, которые соответствуют количеству света, попадающего на каждую ячейку линейного массива. В то время как [илиасам] заплатил примерно 18 долларов за свои, мы нашли их намного дешевле на eBay. И обычно в сканере есть линейный датчик, часто RGB и в комплекте со схемой драйвера, если вы разберете его. Это можно было бы сделать всего за несколько долларов, если бы вы были бережливы.
И обычно в сканере есть линейный датчик, часто RGB и в комплекте со схемой драйвера, если вы разберете его. Это можно было бы сделать всего за несколько долларов, если бы вы были бережливы.
Читать далее «В Советской России самодельный лазерный дальномер просканирует ВАС!!» →
Posted in Robots HacksTagged Neato, XV-11, лазерный дальномер, лидар, лазерный дальномер20 июля 2015 г. Эл Уильямс
Большинство полицейских управлений резко переключились с RADAR на LiDAR после того, как потребители начали покупать детекторы RADAR. Многие из этих устройств LiDAR сейчас находятся на избыточном рынке. Если у вас нет 500 долларов или около того, чтобы купить LiDAR-пушку просто для того, чтобы посмотреть, как она работает, вам повезло. [Алексей Полханов] потратил час на разборку UltraLyte LTI 20-20 LR 100, так что вам это не нужно.
Час кажется многоватым для видео с разборкой, но [Алексей] ускоряется в скучных частях и проводит много времени, рассказывая об оптике и о том, как работает устройство (со множеством нарисованных от руки схем). Он также собирает его обратно и подключает осциллограф, чтобы показать электронную работу устройства.
Он также собирает его обратно и подключает осциллограф, чтобы показать электронную работу устройства.
Он упоминает, что плата дисплея и управления использует последовательный интерфейс для связи с платой контроллера. На основной плате также есть незаполненный разъем, который явно является последовательным портом, вероятно, для перепрограммирования встроенного микроконтроллера. После небольшой обратной инженерии это оружие LiDAR должно быть легко взломано.
В дополнение к плате дисплея и управления, блок содержит источник высокого напряжения для лазера и фотодиода. Создание источника питания для привода лазера, достаточно чистого, чтобы не мешать датчику, является одним из факторов, определяющих конструкцию, и это видно. Блок питания представляет собой большую и сложную плату по сравнению с другими платами в системе.
Читать далее «Полицейский лидар сносит» →
Posted in Slider, TeardownTagged лазерный дальномер, лидар, разборка 26 сентября 2013 г. , Майк Щис
, Майк Щис
На этой неделе мы изменим его с ошибкой обратного проектирования, на которую [Итай] указал нам. Пару лет назад [Нейт] из Sparkfun согласился помочь другу с проектом, требующим точного измерения расстояния. Он знал, что лазерные дальномеры — хороший способ, и упоминал об их использовании в игре в гольф и в строительстве. Он взял эту портативную версию, заявленную как лазерная рулетка. Он приложил доблестные усилия, чтобы перепроектировать печатную плату в надежде найти крючок для данных измерений.
Очевидно, его попытка провалилась, иначе мы бы не говорили об этом в этой колонке. Но о его методах можно многое узнать, и несколько комментариев, связанных с его исходным постом, помогают пролить свет на пару дополнительных вещей, которые можно попробовать.
Читать далее «Провал недели: сбор данных с лазерного дальномера» →
Posted in Провал недели, Колонки Hackaday, Laser HacksTagged сбой, сбой недели, лазерный дальномер, обратное напряжение, серийный номер 16 августа 2012 г. , Майк Щис
, Майк Щис
У нас есть что-то вроде романа с квадрокоптерами, но еще есть место для кое-чего на стороне. Этот беспилотник с неподвижным крылом может выполнять довольно удивительную навигацию. Группа Robust Robotics Group Массачусетского технологического института демонстрирует работу, которую они проделали с самолетом, кульминацией которой стал смертельный полет через гараж (видео после перерыва). Это может показаться не таким уж большим достижением, но учтите, что размах крыльев составляет более двух метров, а повторные прогоны на одном и том же круге приближали его к опорным колоннам в сантиметрах.
В отличие от высокоточных квадрокоптеров, которые зависят от стационарных высокоскоростных камер для обратной связи, этот дрон автономен. Это действительно зависит от того, что он начинает с карты своего окружения, используя ее в сочетании с лазерным дальномером и инерционными датчиками, чтобы проложить свой маршрут и скорректировать его по мере необходимости. Мы думаем, что эта штука должна планировать намного дальше, чем квадрокоптер, поскольку у нее нет возможности тормозить и зависать. Однако это одна из сильных сторон конструкции. Поскольку он использует подход с неподвижным крылом, он может оставаться в воздухе намного дольше, чем квадрокоптер с той же емкостью аккумулятора.
Мы думаем, что эта штука должна планировать намного дальше, чем квадрокоптер, поскольку у нее нет возможности тормозить и зависать. Однако это одна из сильных сторон конструкции. Поскольку он использует подход с неподвижным крылом, он может оставаться в воздухе намного дольше, чем квадрокоптер с той же емкостью аккумулятора.
Продолжить чтение «Автономный дрон с неподвижным крылом пробивает иголку в гараже» →
Posted in Robots HacksTagged самолет, беспилотник, самолет, лазерный дальномер, мит, самолетСамодельный сканирующий лазерный дальномер
Зачем нужно расстояние сканирования?
На сегодняшний день в робототехнике существует не так много методов внутренней навигации. Одним из них является определение положения робота в пространстве с помощью лазерного сканера. Важным преимуществом этого метода является то, что он не требует установки каких-либо маяков в помещении. В отличие от систем, использующих распознавание изображений с камер, обработка данных с дальномера не так ресурсоемка. Но есть недостаток – сложность, а соответственно и цена дальномера.
Но есть недостаток – сложность, а соответственно и цена дальномера.
Традиционно в робототехнике используются лазерные сканеры, использующие принцип фазы или времени пролета для измерения расстояния до объектов. Реализация этих принципов требует довольно сложной схемотехники и дорогих деталей, хотя характеристики приличные – используя эти принципы, можно добиться высокой скорости сканирования и большого расстояния измерения дальности.
А вот для домашних экспериментов по робототехнике такие сканеры мало подходят — цена на них начинается от 1000 долларов.
На помощь приходят дальномеры, использующие триангуляционный принцип измерения расстояния. Дальномер такого типа впервые появился в роботах-пылесосах Neato:
Довольно быстро любители расшифровали протокол этого дальномера, и стали использовать его в своих проектах. Сами дальномеры в качестве запчастей появились на ebay небольшими партиями по цене около 100 долларов. Через несколько лет китайская компания смогла выпустить сканирующий дальномер RPLIDAR, который поставлялся в виде комплектного прибора, а не запчасти. Только цена этих дальномеров была достаточно высока — 400 долларов.
Только цена этих дальномеров была достаточно высока — 400 долларов.
Самодельный дальномер
Как только я узнал о дальномерах Neato, мне захотелось собрать такой же. В итоге у меня получилось, и я описал процесс сборки на Робофоруме.
Первая версия дальномера:
Позже я сделал другую версию дальномера, более подходящую для использования на реальном роботе, но качество ее работы меня не полностью устраивало. Настало время третьей версии дальномера, и о ней будет рассказано позже.
Устройство для сканирующего триангуляционного лазерного дальномера
Принцип измерения расстояния до объекта основан на измерении угла между лазерным лучом, падающим на объект, и линзой дальномера. Зная расстояние лазер-линза (h) и измеренный угол, можно рассчитать расстояние до объекта – чем меньше угол, тем больше расстояние.
Принцип хорошо иллюстрирует картинка из статьи:
Таким образом, ключевыми оптическими компонентами такого дальномера являются лазер, объектив и фотоприемная планка.
Поскольку дальномер сканирующий, то все эти детали, а также управляющая электроника смонтированы на вращающейся головке.
Может возникнуть вопрос – зачем нужно поворачивать оптику и электронику, ведь можно установить вращающееся зеркало? Проблема в том, что точность дальномера зависит от расстояния между объективом и лазером (базовое расстояние), поэтому оно должно быть довольно большим. Соответственно, для кругового сканирования понадобится зеркало диаметром больше базового расстояния. Дальномер с таким зеркалом довольно громоздкий.
Сканирующая головка дальномера с помощью подшипника закреплена на неподвижном основании. Также фиксирует двигатель, вращая головку. Также в состав дальномера следует включить энкодер, предназначенный для получения информации о положении головы.
Как видите, по этой схеме сделаны дальномеры Neato, RPLIDAR и мои самоделки.
Самое сложное в самодельном дальномере – изготовление механической части. Именно ее работа вызывала у меня больше всего нареканий в ранних версиях дальномера. Сложность заключается в изготовлении сканирующей головки, которая должна быть прочно закреплена на подшипнике, вращаться без биений и при этом не должна каким-либо образом передавать электрические сигналы.
Сложность заключается в изготовлении сканирующей головки, которая должна быть прочно закреплена на подшипнике, вращаться без биений и при этом не должна каким-либо образом передавать электрические сигналы.
Во второй версии дальномера первые две проблемы я решил за счет использования частей старого HDD — сам диск использовался как основа сканирующей головки, а двигатель, на котором он был закреплен, уже содержал качественные подшипники. В то же время возникла третья проблема — электрические провода можно было провести только через небольшое отверстие в оси двигателя. Удалось сделать самодельный щеточный узел на 3 строчки, закрепленный в этом отверстии, но получившаяся конструкция была шумной и ненадежной. В данном случае возникла другая проблема – не было линии для проброса сигнала энкодера, и датчик энкодера в данной конструкции должен быть установлен на головке, а диск энкодера с метками на неподвижном основании. Диск энкодера не был жестким, и это часто вызывало проблемы.
Фото второй версии дальномера:
Еще одним недостатком получившегося дальномера является низкая скорость сканирования и резкое падение точности на дистанциях более 3м.
Эти недостатки я решил устранить в третьей версии дальномера.
Электроника
В принципе, электронная часть триангуляционного дальномера достаточно проста и содержит всего два ключевых компонента – светочувствительную линейку и микроконтроллер. Если с выбором контроллера проблем нет, то с линейкой все гораздо сложнее. Светочувствительная линейка, используемая в таком дальномере, должна одновременно обладать достаточно высокой светочувствительностью, позволять считывать сигнал с высокой скоростью и иметь небольшие размеры. Различные линейки ПЗС, используемые в домашних сканерах, обычно довольно длинные. Линейки, используемые в сканерах штрих-кода, тоже не самые короткие и быстрые.
В первой и второй версии дальномера я использовал линейку TSL1401 и ее аналог iC-LF1401. Эти линейки хорошо подходят по размеру, они дешевые, но содержат всего 128 пикселей. Для точного измерения расстояний до 3 метров этого недостаточно, и спасает только возможность анализа субизображения.
В третьем варианте дальномера я решил использовать линейку ЭЛИС-1024:
Однако купить ее было непросто. У основных поставщиков электроники этих линеек просто нет.
Первая линия, которую я смог купить на Таобао, оказалась нерабочей. Второй купил на Алиэкспресс (за 18$), он оказался рабочим. Обе линейки выглядели припаянными – обе имели заглаженные контакты и, судя по маркировке, 2007 года выпуска. И даже на фотографиях у большинства китайских продавцов линейки именно такие. Похоже, действительно новую линейку ЭЛИС-1024 можно купить только напрямую у производителя.
Светочувствительная линейка ЭЛИС-1024, как следует из названия, содержит 1024 пикселя. Он имеет аналоговый выход и достаточно просто управляется.
Линейка ДЛИС-2К имеет еще лучшие характеристики. При аналогичных размерах он содержит 2048 пикселей и имеет цифровой выход. Насколько мне известно, он используется в дальномере Neato, а возможно и в RPLIDAR. Однако найти его в свободной продаже очень сложно, даже в китайских магазинах он появляется не часто и стоит дорого – более 50 долларов.
Так как я решил использовать линейку с аналоговым выходом сигнала, микроконтроллер дальномера должен содержать достаточно быстрый АЦП. Поэтому я решил использовать серию контроллеров — STM32F303, которые при относительно небольшой стоимости имеют несколько быстрых АЦП, способных работать одновременно.
В итоге у меня получилась следующая схема:
Сигнал с линейки (вывод 10) имеет достаточно высокий уровень постоянной составляющей, и его приходится отфильтровывать с помощью разделительного конденсатора.
Далее сигнал нужно усилить – для этого используется операционный усилитель AD8061. Далеко расположенные объекты дают довольно слабый сигнал, поэтому пришлось установить усиление на 100.
Как выяснилось в результате опытов, даже при отсутствии сигнала на выходе выбранного ОУ, для почему-то всегда присутствует напряжение около 1,5В, что мешает обработке результатов и ухудшает точность измерения амплитуды сигнала. Чтобы избавиться от этого смещения, пришлось подать дополнительное напряжение на инвертирующий вход ОУ.
Сделал двухстороннюю доску, сделать такую доску в домашних условиях довольно сложно, поэтому заказал производство плат в Китае (пришлось заказывать сразу 10 штук):
В этом дальномере я использовал дешевую линзу с резьбой М12 с фокусным расстоянием 16 мм. Объектив крепится на печатной плате с помощью готового объективодержателя (такие используются в различных фотоаппаратах).
Лазер в данном дальномере представляет собой инфракрасный (780 нм) лазерный модуль мощностью 3,5 мВт.
Изначально я предполагал, что излучение лазера нужно будет модулировать, но позже выяснилось, что пользоваться используемой линейкой нет смысла, и поэтому лазер теперь включен постоянно.
Для проверки работоспособности электроники была собрана такая конструкция, имитирующая сканирующую головку дальномера:
Уже в таком виде можно было проверить точность измерения дальности, которую может обеспечить дальномер.
Для анализа сигнала, формируемого линейкой, были написаны тестовые программы для микроконтроллера и ПК.
Пример вида сигнала с линейки (объект на расстоянии 3 м).
Изначально схема была не совсем такой, как выше. В ходе экспериментов пришлось частично переделывать первоначальную схему, так что, как видно из фото, некоторые детали пришлось устанавливать навесным способом.
Механическая часть
После того, как электроника была отлажена, пришло время сделать механическую часть.
В этот раз я не стал заморачиваться с механикой HDD, а решил сделать механические части из жидкого пластика, залитого в силиконовую форму. Эта технология подробно описана в Интернете, в том числе на Giktatimes.
Уже после того, как я сделал детали, стало понятно, что детали на 3D-принтере делать будет проще, они могут выйти тяжелее, и, возможно, получится сделать одну деталь вместо двух. У меня нет доступа к 3D-принтеру, поэтому пришлось бы заказывать изготовление деталей в любой компании.
Фото одной из частей сканирующей головки дальномера:
Эта деталь является основой головки.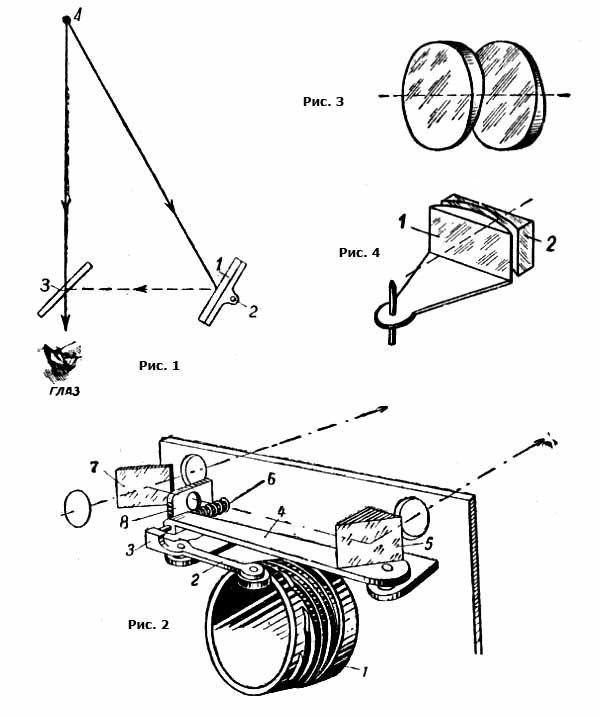 Он состоит из втулки, на которую потом одевается подшипник, и диска. Диск предназначен для крепления второй части башни, кроме того, к нему снизу приклеен диск энкодера.
Он состоит из втулки, на которую потом одевается подшипник, и диска. Диск предназначен для крепления второй части башни, кроме того, к нему снизу приклеен диск энкодера.
Втулка и диск имеют сквозное отверстие, в которое вставляется щеточный узел на 6 рядов – видно на фото. Именно провода, которые видны на фотографии, могут вращаться относительно корпуса этого узла. Для повышения стабильности работы используются 2 пары щеточных линий для передачи сигналов GND и UART TX. Оставшиеся 2 линии используются для передачи напряжения питания и сигнала энкодера.
Силиконовая форма для отливки этой детали:
Вторая часть сканирующей головки изготовлена таким же образом. Он предназначен для крепления печатной платы и лазера к диску. К сожалению, фотографий изготовления этой детали у меня не сохранилось, поэтому ее можно увидеть только в составе дальномера.
Шариковый подшипник используется для крепления сканирующей головки к основанию дальномера. Я использовал дешевый китайский подшипник 6806ZZ. Честно говоря, качество подшипника мне не понравилось – ось его внутренней втулки могла отклоняться относительно внешней оси на небольшой угол, из-за чего головка дальномера тоже немного наклоняется. Установите подшипник на часть с диском, и основание будет показано ниже.
Честно говоря, качество подшипника мне не понравилось – ось его внутренней втулки могла отклоняться относительно внешней оси на небольшой угол, из-за чего головка дальномера тоже немного наклоняется. Установите подшипник на часть с диском, и основание будет показано ниже.
Основание I из прозрачного оргстекла толщиной 5 мм. К основанию крепятся подшипник, датчик энкодера, двигатель дальномера и небольшая печатная плата. Само основание монтируется на любую подходящую поверхность с помощью стоек.
Вот нижняя часть базы дальномера:
печатная плата содержит регулируемый линейный регулятор напряжения для питания двигателя и площадки для подключения проводов щеточного узла. Это также приносит мощность дальномера.
Как и в других дальномерах, двигатель вращает сканирующую головку с помощью ремня. Для того, чтобы он не спадал с гильзы, в ней есть специальное углубление.
Как видно на фото, подшипник крепится к основанию тремя винтами. На сканирующей головке подшипник удерживается выступом на втулке и прижимается к ней другими винтами, одновременно удерживая щеточный узел.
Энкодер состоит из бумажного диска с напечатанными рисками и оптопары с фототранзистором, работающим на отражение. Оптопара закрепляется с помощью подставки на основании так, чтобы плоскость диска находилась рядом с ним:
Сигнал с оптрона через щетку передается на вход компаратора микроконтроллера. В качестве источника опорного напряжения для компаратора используется ЦАП микроконтроллера.
Для того, чтобы дальномер определял положение нулевого угла, на диске энкодера нанесена длинная рискка, которая отмечает нулевое положение головки (она видна справа на фото вверху).
Вот собранный дальномер:
Вид сверху:
разъем сзади дальномера служит для прошивки микроконтроллера.
Для балансировки сканирующей головки на ее передней части установлена большая гайка — она практически полностью исключает вибрацию при вращении головки.
Собранный дальномер необходимо устюстировать – установить лазер в такое положение, чтобы отраженный от предметов свет попадал на линию фотоприемника. Обе пластмассовые детали содержат коаксиальные отверстия, расположенные под лазерной канавкой. В отверстия вкручиваются регулировочные винты, упирающиеся в корпус лазера. Поворачивая эти винты, вы можете изменить наклон лазера.
Обе пластмассовые детали содержат коаксиальные отверстия, расположенные под лазерной канавкой. В отверстия вкручиваются регулировочные винты, упирающиеся в корпус лазера. Поворачивая эти винты, вы можете изменить наклон лазера.
Наблюдая за формой и амплитудой принимаемого сигнала в компьютерной программе и изменяя наклон лазера, нужно добиться максимальной амплитуды сигнала.
Также триангуляционные дальномеры требуют калибровки, как я уже писал ранее :
Для того, чтобы использовать датчик для измерения расстояния, необходимо его откалибровать, т.е. определить закон, связывающий результат, возвращаемый датчиком, и фактическое расстояние . Сам процесс калибровки представляет собой серию измерений, в результате которых формируется набор расстояний от датчика до объекта и соответствующие результаты.
В данном случае калибровка представляла собой серию измерений расстояний до различных объектов самодельным дальномером и лазерной рулеткой, после чего по полученным парам измерений выполнялся регрессионный анализ и составлялось математическое выражение.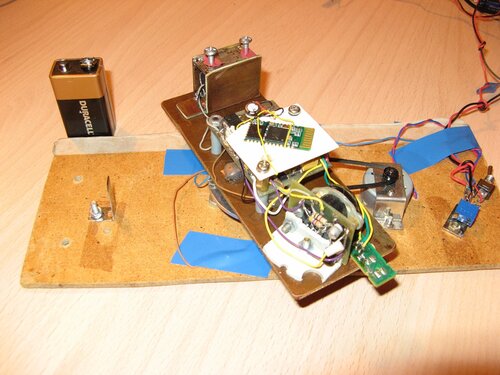
Получившийся дальномер имеет существенный недостаток – из-за отсутствия модуляции лазерного излучения он некорректно работает при любом сильном освещении. Обычное комнатное освещение (даже при использовании мощной люстры) не влияет на работу дальномера, но расстояние до поверхностей, непосредственно освещенных Солнцем, дальномер измеряет некорректно. Для решения этой проблемы в состав дальномера необходимо включить интерференционный фильтр, пропускающий свет только определенной длины волны — в данном случае 780 нм.
Эволюция самодельных дальномеров:
Габаритные размеры получившегося дальномера:
Размер основания: 88х110 мм.
Общая высота дальномера: 65 мм (может быть уменьшена до 55 при уменьшении высоты стоек).
Диаметр сканирующей головки: 80 мм (как мини-CD).
Как и у любого другого триангуляционного дальномера, точность измерения расстояния у этого дальномера резко падает с увеличением расстояния.
При измерении расстояния до объекта с коэффициентом отражения около 0,7 у меня были примерно следующие точностные характеристики:
| Distance | Scatter |
|---|---|
| 1m | <1 cm |
| 2 m | 2 cm |
| 5 m | 7 cm |
The cost of manufacturing range finder:
| DIY, $ | Opt. , $ , $ | |
|---|---|---|
| Base | ||
| Base plate | 1.00 | 0.50 |
| Engine | 0.00 | 1.00 |
| Bearing | 1.50 | 1.00 |
| Brush knot | 7.50 | 5.00 |
| Fasteners | 0.00 | 2.00 |
| Scan head | ||
| STM32F303CBT6 controller | 5.00 | 4.00 |
| Photo-receiver ruler | 18.00 | 12.00 |
| The rest of the electronics | 4.00 | 3.00 |
| Pay | 1.50 | 0.50 |
| Lens | 2.00 | 1.50 |
| Lens holder | 1.00 | 0.50 |
| Laser | 1.00 | 0. 80 80 |
| Plastic parts | 3.00 | 2.00 |
| Fasteners | 0.00 | 1.00 |
| Assembly | 0.00 | 20.00 |
| Total: | 45.50 | 54.80 |
In the first column – how much the range finder обошлась мне, во вторую – сколько это могло стоить в промышленном производстве (эстимейт очень приблизительный).
Программное обеспечение для дальномера
Перед написанием программы необходимо рассчитать тактовую частоту, на которой будет работать линейка фотоприемников.
В старых версиях дальномера частота развертки была ограничена 3Гц, в новом дальномере решил сделать выше – 6Гц (это учитывалось при выборе линейки). Дальномер делает 360 измерений за один оборот, так что при указанной скорости он должен иметь возможность производить 2160 измерений в секунду, то есть одно измерение должно занимать менее 460 мкс. Каждое измерение состоит из двух этапов – экспозиции (накопления света линейкой) и считывания данных с линейки. Чем быстрее считывается сигнал, тем больше может быть время экспозиции, а значит, больше амплитуда сигнала. При тактовой частоте 8 МГц время чтения 1024 пикселей составит 128 мкс, при 6 МГц — 170 мкс.
Каждое измерение состоит из двух этапов – экспозиции (накопления света линейкой) и считывания данных с линейки. Чем быстрее считывается сигнал, тем больше может быть время экспозиции, а значит, больше амплитуда сигнала. При тактовой частоте 8 МГц время чтения 1024 пикселей составит 128 мкс, при 6 МГц — 170 мкс.
При тактовой частоте микроконтроллера серии STM32F303 72 МГц максимальная частота дискретизации АЦП составляет 6 MSPS (при разрядности 10 бит). Так как я хотел проверить работу дальномера на тактовой частоте 8МГц, то решил использовать режим работы АЦП, при котором два АЦП работают одновременно (Dual ADC mode – Interleaved mode). В этом режиме АЦП1 запускается после сигнала от внешнего источника, а затем, через настраиваемое время, АЦП2:
Как видно из диаграммы, суммарная частота выборок АЦП в два раза превышает частоту запуска (в данном случае это сигнал с таймера TIM1).
При этом TIM1 также должен генерировать тактовый сигнал для линии фотоприемника, синхронный с отсчетами АЦП.
Для того, чтобы получить два сигнала от одного таймера с частотами, отличающимися в два раза, можно один из каналов таймера перевести в режим TIM_OCMode_Toggle, а второй канал должен формировать обычный сигнал ШИМ.
Блок-схема программы дальномера:
Ключевой частью программы является сбор данных с линейки и управление ими. Как видно из схемы, этот процесс идет на аппаратном уровне, за счет совместной работы TIM1, ADC1/2 и DMA. Чтобы время экспозиции линейки было постоянным, используется таймер TIM17, работающий в режиме Single Pulse.
Таймер TIM3 генерирует прерывания при срабатывании компаратора, подключенного к энкодеру. За счет этого рассчитывается период вращения сканирующей головки дальномера и ее положение. По полученному периоду вращения рассчитывается период таймера TIM16 таким образом, что он формирует прерывания при повороте головы на 1 градус. Эти прерывания используются для запуска экспозиции линейки.
После того, как DMA передаст в память контроллера все 1024 значения, захваченные АЦП, программа начинает анализировать эти данные: сначала ищется максимальное положение сигнала до пикселя, затем, используя центр алгоритм гравитационного поиска с более высокой точностью (0,1 пикселя). Полученное значение сохраняется в массиве результатов. После того, как сканирующая головка сделает полный оборот, в момент прохождения нуля, этот массив передается в модуль UART по другому каналу DMA.
Полученное значение сохраняется в массиве результатов. После того, как сканирующая головка сделает полный оборот, в момент прохождения нуля, этот массив передается в модуль UART по другому каналу DMA.
Использование дальномера
Качество этого дальномера, как и предыдущих, проверено с помощью самописной программы. Ниже приведен пример изображения, сгенерированного этой программой в результате работы дальномера:
Однако дальномер создан не для того, чтобы просто лежать на столе – он был установлен на старый пылесос Roomba 400 вместо дальномера вторая версия:
Компьютер Orange Pi PC предназначен для управления роботом и связи с ним.
Как оказалось, из-за большого падения напряжения на линейном источнике питания двигателя дальномера для работы дальномера со скоростью 6 оборотов в секунду требуется напряжение питания 6В. Поэтому Orange Pi и дальномер питаются от отдельных DC-DC преобразователей.
Я использую ROS для управления роботом и анализа данных с дальномера.![]()
Данные с дальномера обрабатываются специальным драйвером РОС (на основе драйвера дальномера Neato), который получает данные от дальномера по UART, пересчитывает их в расстояния до объектов (по калибровочным данным) и публикует в стандартном РОС формат.
Вот информация, полученная в rviz (программа визуализации данных ROS), робот установлен на полу:
Длина стороны ячейки 1 метр.
После того, как данные попали в ROS, их можно обрабатывать с помощью готовых пакетов программ. Чтобы построить карту квартиры, я использовал hector_slam. Для справки: SLAM — метод одновременного построения карты местности и определения положения робота на ней.
Пример получившейся карты квартиры (форма несколько необычная, т.к. дальномер “видит” мебель, а не стены, и показаны не все комнаты):
ROS позволяет объединить несколько программ («узлов» в терминологии ROS), работающих на разных компьютерах, в единую систему. Благодаря этому на Orange Pi можно запускать только ROS-драйвера Roomba и дальномера, а анализировать данные и управлять роботом с другого компьютера. При этом эксперименты показали, что hector_slam нормально работает на Orange Pi, приемлемо нагружая процессор, поэтому организовать полностью автономную работу робота вполне реально.
При этом эксперименты показали, что hector_slam нормально работает на Orange Pi, приемлемо нагружая процессор, поэтому организовать полностью автономную работу робота вполне реально.
Система SLAM, благодаря данным с дальномера, позволяет роботу определять свое положение в пространстве. Используя данные о положении робота и построенную карту, можно организовать навигационную систему, позволяющую «направить» робота в заданную точку на карте. В ROS есть программный пакет для этой задачи, но, к сожалению, мне не удалось заставить его работать должным образом.
Видео работы дальномера:
Более подробное видео построения карты с помощью hector_slam:
Исходники программы-контроллера
PS У меня тоже есть проект более простого лидара.
Лучшие дальномерные прицелы 2022 года
В настоящее время прицелы становятся футуристическими и наполненными технологиями.
Одним из недавних нововведений стало добавление лазерных дальномеров (или LRF) в прицелы.
Когда LRF впервые появились на рынке, это были отдельные портативные устройства. Сейчас строят прямо в оптику .
Прежде чем мы углубимся в изучение лучшего дальномера, давайте кратко рассмотрим, как он работает…
Как работают лазерные дальномеры?Существует множество различных моделей от множества компаний, но основная концепция одна и та же:
Устройство стреляет лазером в объект и измеряет время, необходимое для того, чтобы свет достиг его. Затем он использует скорость света и время, которое потребовалось свету для прохождения, чтобы рассчитать расстояние.
Раньше приходилось носить с собой отдельное устройство для проверки дальности, а затем корректировать прицел.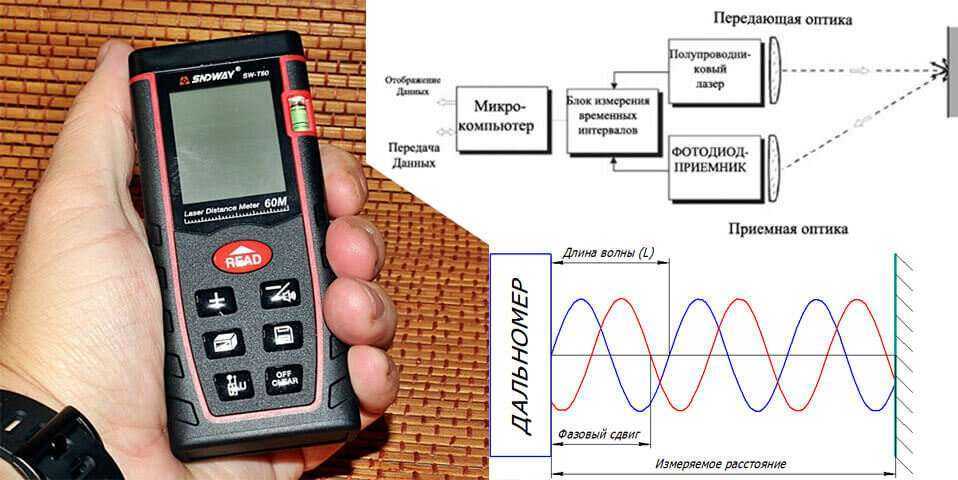
Теперь в некоторых прицелах это встроено, так что вы можете просто смотреть через оптику. Некоторые даже настраивают сетку под вас!
Как всегда, у этой комбинации есть свои плюсы и минусы.
Давайте проверим их…
Преимущества прицела со встроенным дальномером 1. Полный комплект
При охоте или стрельбе на дальние дистанции с 6.5 Creemoor ваше снаряжение всегда под рукой. плюс.
Вместо того, чтобы тратить время на то, чтобы доставать отдельное устройство, вы можете больше сосредоточиться на съемке.
Теперь на одно снаряжение меньше, о чем нужно беспокоиться и возиться.
2. ПростотаРаботать с одним оборудованием проще, чем с двумя разными.
Объединение этих устройств означает, что они будут работать от одного аккумулятора. Вам также нужно будет изучить только одно устройство вместо двух разных.
Кроме того, если LRF находится в прицеле, он останется установленным на винтовке, а не будет носиться отдельно.
Вы сможете стрелять быстрее, так как вы можете оставаться на цели, определяя расстояние.
Удерживая цель, вы сможете сделать больше выстрелов, не выходя из огневой позиции. Помните, точная стрельба требует повторения.
Это позволяет реже менять позицию для стрельбы.
Недостатки прицела со встроенным дальномером 1. Размеры/вес
Комбинация LRF с оптическими прицелами делает прицелы более тяжелыми и громоздкими.
В прицеле больше компонентов и технологий, поэтому он, естественно, должен быть больше. Это может быть неудобно, если вы носите винтовку по охотничьим угодьям.
Также может быть тяжеловат для стрельбы из положения стоя.
2. СтоимостьЭта высокотехнологичная оптика имеет высокую цену.
Вы получаете два устройства в одном, но в некоторых случаях вы можете заплатить больше, чем если бы вы купили их по отдельности.
Удобно иметь два устройства в одном, но за это придется платить.
3. Доступность опцийПоскольку прицелы LRF поставляются в комплекте, индивидуальная настройка невелика.
Системы LRF в прицелах не взаимозаменяемы, поэтому вы получаете то, что покупаете.
Если вы выберете прицел и ручной LRF, у вас будет гораздо больше возможностей для оптических прицелов и устройств LRF. Это позволяет вам выбрать предпочтительные бренды и найти комбинацию, которая лучше всего подходит для вас.
Теперь, когда мы рассмотрели взлеты и падения этой новой технологии, давайте рассмотрим лучшие прицелы для дальномеров…
3 лучших дальномерных прицела краткий список 3-х лучших дальномерных прицелов для вашей винтовки:
- ATN X-Sight II HD 5-20
- Burris 200116 Eliminator 4-16×50
- ATN Thor-HD 640 5-50
5 905 905 ATN X-Sight II HD 5-20
ATN X-Sight II HD 5-20 — самый дешевый вариант из представленных.
1 093 отзыва
ATN X-Sight II HD 5-20 Smart Day/Night Rifle Scope с видео 1080p, баллистическим калькулятором, дальномером, WiFi, электронным компасом, GPS, барометром, приложениями для IOS и Android
Несмотря на то, что это самый дешевый, он все еще наполнен интересными функциями.
LRF в этой оптике имеет точную дальность до 400 ярдов. Эта модель требует, чтобы вы отметили верх и низ цели для расчета диапазона.
Помимо приличного LRF, он оснащен ночным видением, видеозаписью и потоковой передачей по Wi-Fi.
Он воспроизводится в формате 1080 HD и имеет функцию видео, активируемую отдачей. Видеозапись интересна тем, что позволяет проанализировать вашу технику. Это также позволяет вам снимать и делиться памятными снимками.
Это еще не все. Этот прицел также поставляется с баллистическим процессором. Это работает в тандеме с LRF для расчета угла выстрела и траектории пули.
После того, как все факторы окружающей среды будут рассчитаны, прицел создаст для вас новую точку прицеливания.
Говоря о точке прицеливания, есть 7 различных вариантов сетки на выбор. Увеличение от X5 до X20, питание от 4 батареек типа АА.
Батареи можно заменить на перезаряжаемый блок.
Все эти функции создают большой простор. Его длина составляет 19,5 дюймов, а вес — 4,4 фунта.
Для тех, кто занимается стрельбой на дальние дистанции, это отличный дальномерный прицел для начинающих. LRF не является чем-то особенным, но он сработает, когда вы начнете тянуться за пределы 100 ярдов.
Кроме того, вы получаете массу наворотов по довольно разумной цене. Для прицела он немного громоздкий и тяжелый.
Таким образом, он может быть более полезным в качестве игрушки для стрельбы и учебного пособия, чем специальная охотничья оптика, такая как Vortex HST или PST.
1 093 отзыва
Прицел ATN X-Sight II HD 5-20 Smart Day/Night с видео 1080p, баллистическим калькулятором, дальномером, WiFi, электронным компасом, GPS, барометром, приложениями для IOS и Android
- Используйте режим «День и ночь» в разрешении HD — наша технология HD обеспечивает кристально чистое изображение, когда это необходимо.

- Нулевая дальность: 100 ярдов. Дневное и ночное видение в миллионах цветов – лучшая охотничья оптика, которая соответствует ситуации. Поле зрения на 1000 ярдов – 240 футов. Начальная скорость: 2850 кадров в секунду
- Баллистический калькулятор – смещает точку удара на лету, позволяя вам быстро вычислить баллистика для нужд любого стрелка. Легко определяйте точную баллистику для опытных дальних и угловых выстрелов
2. Burris 200116 Eliminator 4-16×50
Burris 200116 Eliminator 4-16×50 — вариант по умеренной цене. Он не переполнен модными технологиями, но все же имеет свое место в плане качества и дополнительных функций.
Лазерный дальномер Burris Eliminator 4-16×50 мм с баллистическим вычислителем, Eliminator III
Максимальная дальность LRF составляет 1200 ярдов по отражающим целям и 750 ярдов по неотражающим целям.
Он работает, наведя прицел на цель и нажав одну кнопку.
Это простая в использовании система, которая также оснащена встроенным угломером для съемки вверх или вниз по склону.
Прицел также учитывает траекторию вашей пули. Используя эти инновации, прицел подстроит точку прицеливания за вас.
Увеличение от 4X до 16X.
Сетка представляет собой набор перекрестий с индикатором дальности вверху.
Эта более простая конструкция питается от батареи CR123A.
Чуть менее громоздкий, но все равно большой. Общая длина составляет 13 дюймов, а вес – 1,63 фунта.
Это качественная оптика, которая отлично подходит для практического применения.
Он легче, но имеет далеко идущий LRF и другие полезные технические функции. Это делает его лучшим вариантом для переноски в охотничьи угодья.
Это также гарантирует, что вы не потеряетесь в большом количестве гаджетов. Это немного отбросит вас назад, но не сломит банк.
Лазерный дальномер Burris Eliminator 4-16×50 мм с баллистическим калькулятором, Eliminator III
- ТОЧНЫЙ ПРИЦЕЛ — Положитесь на Eliminator, чтобы определить расстояние до цели, скорректировать траекторию и выделить идеальный прицел
- СДЕЛАЙТЕ ОХОТУ БОЛЕЕ ЭФФЕКТИВНОЙ дополнительные переменные и догадки, и сделайте вашу следующую охоту эффективной и продуктивной
- ДАЛЬНОМЕР ДАЛЬНЕЙ ДИСТАНЦИИ — Этот лазерный дальномер обеспечивает дальность действия более 1200 ярдов, увеличивая расстояние, на котором вы можете сделать этичный выстрел
3.
 ATN Thor-HD 640 5-50
ATN Thor-HD 640 5-50ATN Thor-HD 640 — самая дорогая и укомплектованная дальномерная оптика из трех.
Тепловизионный прицел ATN THOR-HD 640, увеличение до 50x, сенсор 640×480, гарантия 3 года
Этот прицел космической эры предлагает LRF, систему тепловизионного обнаружения, видео и потоковую передачу, а также высокую цену.
LRF имеет точность до 600 ярдов и работает, отмечая верх и низ цели.
Тепловая система использует тепловую энергию вместо света. Это означает, что его можно использовать в полной темноте, как и мои голографические прицелы Aimpoint.
В этой оптике также есть баллистический калькулятор.
Используя эти функции, оптика создаст для вас новую точку прицеливания.
Имеется семь вариантов сетки и колоссальное увеличение от X5 до X50. Он также поставляется с функциями записи видео и Wi-Fi и совместим с Android.
Он также использует карту micro SD для хранения видеоматериалов.