Металлоискатель на микроконтроллере: Самодельный металлоискатель «Забава», с дискриминацией на микроконтроллере.
alexxlab | 19.05.2023 | 0 | Разное
Металлоискатель на микроконтроллере AVR – Микроконтроллеры и Технологии
С давних пор людей привлекают приборы для поиска скрытых металлических предметов. Причины этого интереса различны. Строителей интересует расположение металлической арматуры в стенах, искатели кладов мечтают найти в развалинах старого здания кувшин с золотыми монетами, саперы разыскивают неразорвавшиеся «подарки» прошлых войн. Всех этих людей объединяет желание иметь недорогой, компактный и экономичный прибор, который поможет им обнаружить через слой земли или бетона металлические предметы и, по возможности, определить из какого металла они состоят. Если исключить экзотические методы, вроде лозоискательства и экстрасенсов, то абсолютное большинство таких приборов строится на базе электронных приборов, реагирующих на изменение металлическими предметами электромагнитного поля возбуждаемого поисковым прибором. Наиболее часто в качестве катушки возбуждения и одновременно датчика прибора используется рамочная катушка, состоящая из нескольких сотен витков медного провода и включенная в контур автогенератора.
Частотный детектор
Один из самых простых – это прибор, работающий по принципу “срыва резонанса” (OR – Off Resonance). Принцип действия этого прибора основан на использовании частотного детектора на основе колебательного контура. См. рис. 1.
Рисунок 1. Структурная схема OR металлоискателя
Колебательный контур частотного детектора имеет резонансную частоту, близкую к частоте поискового генератора. Изменение частоты генератора приводит к изменению амплитуды сигнала на контуре, что фиксируется помощью индикатора, например стрелочного прибора. Такие приборы не нашли широкого применения. Их недостатки – необходимость обеспечения стабильной амплитуды сигнала на выходе генератора, а также необходимость подстройки резонансной частоты контура из-за влияния дестабилизирующих факторов как на контур поискового генератора, так и на контур частотного детектора.
Изменение частоты генератора приводит к изменению амплитуды сигнала на контуре, что фиксируется помощью индикатора, например стрелочного прибора. Такие приборы не нашли широкого применения. Их недостатки – необходимость обеспечения стабильной амплитуды сигнала на выходе генератора, а также необходимость подстройки резонансной частоты контура из-за влияния дестабилизирующих факторов как на контур поискового генератора, так и на контур частотного детектора.
Метод биений
Другой прибор, – это металлоискатель на биениях (BFO – Beat Frequency Oscillation). Принцип действия такого металлоискателя основан на биениях частоты эталонного генератора и частоты поискового генератора. См рис. 2.
Рисунок 2. Структурная схема BFO металлоискателя
Измерительный и эталонный генераторы настраиваются на одинаковую частоту. При изменении частоты измерительного генератора на выходе смесителя появляется сигнал разностной частоты. Оператор воспринимает этот сигнал на слух или визуально – в зависимости от конструкции. Такие приборы производятся уже несколько десятилетий. Сейчас по такому принципу строятся, в основном, недорогие металлоискатели-игрушки и любительские металлоискатели. Такие приборы имеют ряд недостатков. Первый – это наличие паразитной взаимной синхронизации обоих генераторов. Это приводит к тому, что оказывается невозможным оценить очень малую разность частот и как следствие – существенно снижается чувствительность прибора. Второй недостаток – это отсутствие селекции по типам металлов. Ферромагнитные объекты вызывают понижение частоты, а металлические неферромагнитные – повышение частоты измерительного генератора. Однако после смесителя в BFO металлоискателе информация о знаке ухода частоты теряется.
Оператор воспринимает этот сигнал на слух или визуально – в зависимости от конструкции. Такие приборы производятся уже несколько десятилетий. Сейчас по такому принципу строятся, в основном, недорогие металлоискатели-игрушки и любительские металлоискатели. Такие приборы имеют ряд недостатков. Первый – это наличие паразитной взаимной синхронизации обоих генераторов. Это приводит к тому, что оказывается невозможным оценить очень малую разность частот и как следствие – существенно снижается чувствительность прибора. Второй недостаток – это отсутствие селекции по типам металлов. Ферромагнитные объекты вызывают понижение частоты, а металлические неферромагнитные – повышение частоты измерительного генератора. Однако после смесителя в BFO металлоискателе информация о знаке ухода частоты теряется.
Частотный детектор на основе ФАПЧ
Следующий прибор (PLL – Phase Locked Loop) – это прибор, в котором недостаток металлоискателя на биениях используется во благо.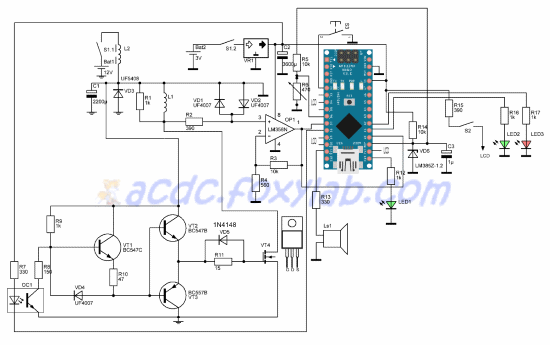 В таком приборе оба генератора, измерительный и эталонный, работают строго на одной частоте. Причем частота измерительного генератора подстраивается под частоту эталонного генератора с помощью системы ФАПЧ. См. рис. 3.
В таком приборе оба генератора, измерительный и эталонный, работают строго на одной частоте. Причем частота измерительного генератора подстраивается под частоту эталонного генератора с помощью системы ФАПЧ. См. рис. 3.
Рисунок 3. Структурная схема PLL металлоискателя
Сигнал напряжения подстройки используется для определения величины и знака изменения частоты. Такие металлоискатели обладают селекцией по типам металлов. Существует несколько радиолюбительских конструкций такого типа. К недостаткам таких приборов можно отнести следующее – наличие “полезной” ФАПЧ не исключает наличия паразитной взаимной синхронизации обоих генераторов, как и в приборе на биениях. Это приводит к тому, что уменьшается крутизна регулировочной характеристики, и как результат уменьшается дальность обнаружения.
Цифровой частотометр
Идея использования цифрового частотомера для регистрации ухода частоты измерительного генератора не нова.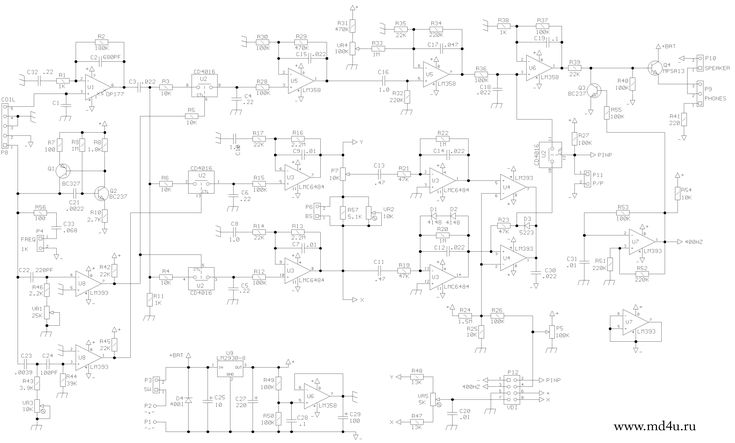 Такой металлоискатель (FM – Frequency Meter см. Рис.4.) свободен от большинства недостатков, присущих предыдущим схемам. Его принцип действия заключается в следующем:
Такой металлоискатель (FM – Frequency Meter см. Рис.4.) свободен от большинства недостатков, присущих предыдущим схемам. Его принцип действия заключается в следующем:
Сначала электронный частотомер оценивает частоту измерительного генератора, когда датчик находится вдали от объектов поиска. Это значение заносится в запоминающий регистр. Затем, в процессе поиска, частотомер непрерывно измеряет текущую частоту измерительного генератора. Из полученных значений вычитается значение эталонной частоты, и результат подается на устройство индикации. Очевидно, что в такой конструкции эффект паразитной взаимной синхронизации генераторов будет выражен значительно слабее – ведь теперь частота измерительного генератора (единицы-десятки килогерц) на несколько порядков ниже частоты опорного генератора (десятки мегагерц). С помощью частотомера можно измерить не только величину ухода частоты измерительного генератора, но и ее знак, следовательно, такой металлоискатель обладает селективностью по типам металлов.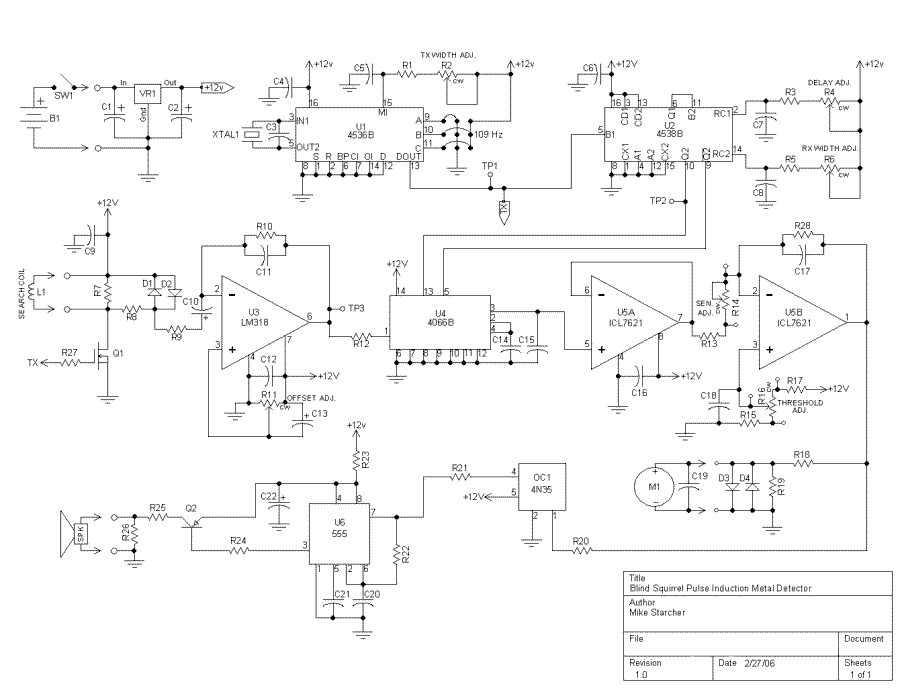
Рисунок 4. Структурная схема FM металлоискателя
Однако реализация этой идеи “в лоб”, не позволяет получить реальную чувствительность, большую чем в приборе на биениях. Это связано с тем, что невозможно напрямую в реальном масштабе времени (20…40 мс на один отсчет) регистрировать очень малые уходы частоты (единицы и доли герц). Нам удалось решить эту проблему следующим образом – из теории радиоизмерений известен метод “быстрого” измерения низких частот – т.н. метод обратного счета. В этом методе измеряется период сигнала, а частота вычисляется как его обратная величина. Оставалась только задача практической реализации.
Практическая конструкция металлоискателя
Очевидно, что если реализовывать такое устройство на элементах средней степени интеграции, то получится сравнительно сложный и громоздкий прибор, что для мобильного исполнения нежелательно. Выходом из этой ситуации стало применение микроконтроллера. На микроконтроллер оказалось возможно возложить не только задачу по измерению периода, но и практически все функции по обработке результатов – вычисление разности частот, звуковую и световую индикацию результатов измерений. Наш металлоискатель реализован на микроконтроллере AT90S2313-10PI производства фирмы Atmel.
На микроконтроллер оказалось возможно возложить не только задачу по измерению периода, но и практически все функции по обработке результатов – вычисление разности частот, звуковую и световую индикацию результатов измерений. Наш металлоискатель реализован на микроконтроллере AT90S2313-10PI производства фирмы Atmel.
Это 8-битный экономичный RISC микроконтроллер. Имеет на частоте 10 MHz производительность 10 MIPS. Содержит: 2 кБ флэш памяти, 128 байт EEPROM, 15 линий ввода/вывода, 32 рабочих регистра, два таймера/счетчика, сторожевой таймер, аналоговый компаратор, универсальный последовательный порт. Более подробно с семейством AVR микроконтроллеров можно ознакомиться на сайте производителя.
Основные технические характеристики металлоискателя
Напряжение питания: 5,5-20 В
Потребляемый ток: 15 мА
Индикация: световая – 7 светодиодов и звуковая
Режимы поиска: статический и динамический
Дискриминация: ферромагнетики/неферромагнетики
Глубина обнаружения (на воздухе):
Монета диаметром 25 мм: 11 см
“Пистолет”: 17 см
“Каска”: 37 см
Принципиальная схема
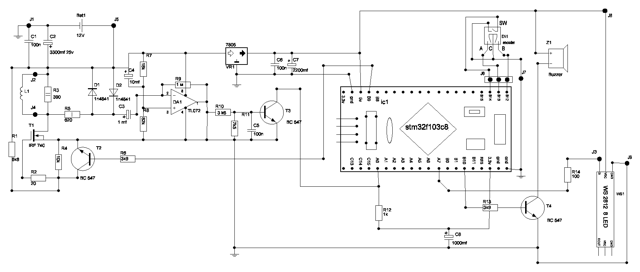
Принципиальная схема металлоискателя по принципу частотомера изображена рис. 5.
5.
Рисунок 5. Принципиальная электрическая схема металлоискателя
Измерительный генератор построен на таймере D1 NE555. Она используется в несколько необычном включении – в качестве LC генератора. Колебательный контур генератора состоит из конденсаторов C1,C2 и катушки индуктивности датчика. Резонансная частота контура определяется как:
где C – это последовательное соединение конденсаторов C1 и C2. Так как микроконтроллер автоматически подстраивается под частоту измерительного генератора, в схеме не предусмотрена подстройка частоты генератора. При использовании датчика диаметром 190 мм (100 витков) и емкостях конденсаторов С1=0.047 F и C2=0.01 F частота составит около 20 кГц. При необходимости ее можно изменить, заменив конденсаторы C1, C2. При этом желательно чтобы их емкости находились в соотношении примерно (4…6): 1.
На микроконтроллер D2 возложены все остальные функции по обработке сигнала измерительного генератора вплоть до индикации.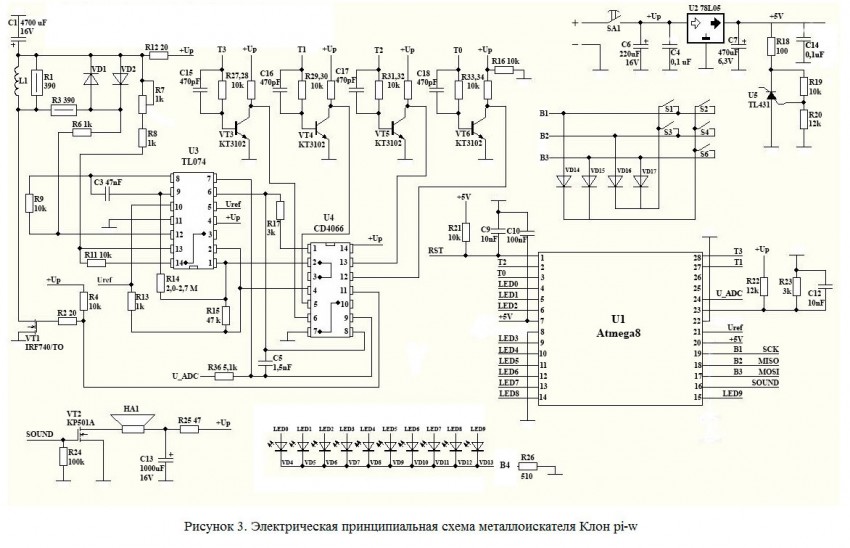 В данной схеме применен микроконтроллер AT90S2313, описанный выше. Исполнение Industrial (температурный диапазон -40C…+85C). Это сделано из соображений, чтобы прибор мог эксплуатироваться в полевых условиях при отрицательных температурах. Непосредственно к микросхеме микроконтроллера подключены как органы управления, так и органы индикации. В металлоискателе реализованы два режима работы, которые задаются при помощи переключателя S1 – статический и динамический. В статическом режиме сигнал, который представляет собой цифровой код разности частот, логарифмируется и сразу подается на индикацию. Каждый уровень световой индикации сопровождается своим тоном звуковой индикации.
В данной схеме применен микроконтроллер AT90S2313, описанный выше. Исполнение Industrial (температурный диапазон -40C…+85C). Это сделано из соображений, чтобы прибор мог эксплуатироваться в полевых условиях при отрицательных температурах. Непосредственно к микросхеме микроконтроллера подключены как органы управления, так и органы индикации. В металлоискателе реализованы два режима работы, которые задаются при помощи переключателя S1 – статический и динамический. В статическом режиме сигнал, который представляет собой цифровой код разности частот, логарифмируется и сразу подается на индикацию. Каждый уровень световой индикации сопровождается своим тоном звуковой индикации.
Динамический режим предназначен для поиска мишеней в сложных условиях, на фоне помех от грунта, минералов и т.д. В динамическом режиме сигнал подвергается цифровой фильтрации, которая выделяет полезный сигнал на фоне мешающих сигналов. В своем приборе мы применили оптимальную согласованную фильтрацию. Вкратце ее суть заключается в том, что для любого сигнала существует оптимальный фильтр, позволяющий получить максимальный отклик на выходе фильтра.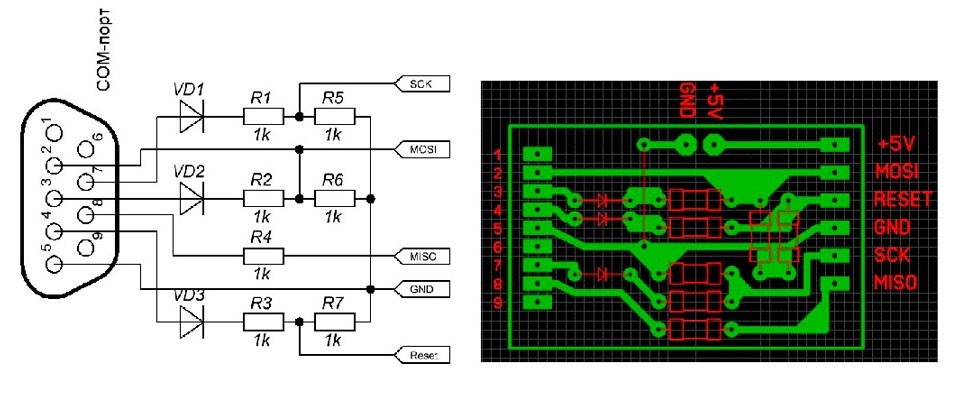 Мы реализовали такой цифровой фильтр для сигнала расстройки частоты, который возникает при движении поисковой катушки над мелкими мишенями со скоростью 0.5-1 м/c. Фильтр реализован программно.
Мы реализовали такой цифровой фильтр для сигнала расстройки частоты, который возникает при движении поисковой катушки над мелкими мишенями со скоростью 0.5-1 м/c. Фильтр реализован программно.
При помощи переменного резистора R6 регулируется чувствительность прибора. Светодиоды VD1…VD3 индицируют уровень отклонения частоты измерительного генератора в случае преобладания ферромагнитного эффекта. Светодиоды VD5…VD7 – в случае преобладания эффекта проводимости. Светодиод VD4 указывает на нулевой сдвиг частоты. Наушник Y предназначен для звуковой индикации отклонения частоты сигнала измерительного генератора.
Схема содержит рекордно низкое количество деталей. При этом к ним не выдвигается особых требований. Микросхему AT90S2313-10PI можно заменить на AT90S2313-10PC, однако, в этом случае не гарантируется работа при температуре меньше 0C. (что вполне может быть в полевых условиях).
Микросхему D1 можно попробовать заменить на КР1006ВИ1. Светодиоды желательно выбирать с повышенной яркостью свечения.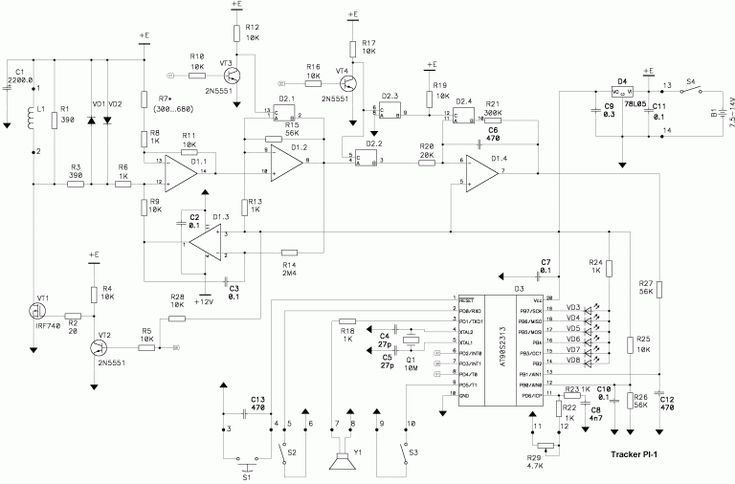 Стабилизатор D3 можно заменить на К1184ЕН1 или, что несколько хуже – 78L05. В последнем случае минимально допустимое напряжение батареи составит 6,7 В. К резисторам особых требований не предъявляется. Они могут иметь рассеиваемую мощность 0,125-0,25 Вт.
Стабилизатор D3 можно заменить на К1184ЕН1 или, что несколько хуже – 78L05. В последнем случае минимально допустимое напряжение батареи составит 6,7 В. К резисторам особых требований не предъявляется. Они могут иметь рассеиваемую мощность 0,125-0,25 Вт.
Конденсаторы C1 и C2 – должны иметь минимальный ТКЕ, особенно C2. К остальным конденсаторам не предъявляется особых требований.
Наушник Y (или наушники) можно взять от плеера. Возможно потребуется подобрать номинал резистора R3 для получения приемлемой громкости. В крайнем случае, наушник можно заменить на пьезоизлучатель.
Конструкция корпуса прибора может быть достаточно произвольной.
Особо следует остановиться на конструкции поисковой катушки – она может быть реализована различными способами. Основные требования к ней – жесткость конструкции, герметичность и наличие электростатического экрана. Можно предложить следующую технологию изготовления катушки:
Берется доска подходящего размера и на ней рисуется окружность диаметром 190 мм. Затем равномерно по окружности в доску забиваются небольшие гвозди – 15…20 штук. На эти гвозди наматывается 100 витков эмалированного провода диаметром 0.3 – 0.56 мм. После намотки гвозди извлекаются или подгибаются и катушка снимается с оправки. Следующий этап – обмотка катушки изолентой. Обмотка ведется внахлест. См. рис.6
Затем равномерно по окружности в доску забиваются небольшие гвозди – 15…20 штук. На эти гвозди наматывается 100 витков эмалированного провода диаметром 0.3 – 0.56 мм. После намотки гвозди извлекаются или подгибаются и катушка снимается с оправки. Следующий этап – обмотка катушки изолентой. Обмотка ведется внахлест. См. рис.6
Рисунок 6. Обмотка катушки липкой лентой
Аналогичным образом поверх слоя из липкой ленты наносится слой из алюминиевой фольги, служащий экраном обмотки датчика. Для этого фольга нарезается на полосы шириной около 10 мм. Для предотвращения образования короткозамкнутого витка, снижающего добротность контура, обмотка из фольги должна занимать не всю поверхность кольца обмотки датчика – от фольги оставляется свободным небольшой участок длиной 10-20 мм. Отвод от экрана выполняется луженым одножильным проводом, который закрепляют узлом поверх экрана. В завершение, кольцо обмотки датчика обматывают еще одним слоем липкой ленты по все поверхности, выпустив наружу выводы обмотки и экрана. К этим выводам подпаивается экранированный кабель, который соединяет катушку с металлоискателем. Жесткость катушке можно придать различными способами. Один из них – подобрать подходящий корпус, например, взять крышку от набора пластиковой посуды, поместить в него катушку и залить эпоксидной смолой. Предварительно необходимо проделать в корпусе отверстие и продеть в него кабель. Также на корпусе катушки необходимо предусмотреть крепление для штанги.
К этим выводам подпаивается экранированный кабель, который соединяет катушку с металлоискателем. Жесткость катушке можно придать различными способами. Один из них – подобрать подходящий корпус, например, взять крышку от набора пластиковой посуды, поместить в него катушку и залить эпоксидной смолой. Предварительно необходимо проделать в корпусе отверстие и продеть в него кабель. Также на корпусе катушки необходимо предусмотреть крепление для штанги.
Вид печатной платы, расположение элементов на печатной плате и рисунок печатной платы (М1:1) приведены на рис.7, 8 и 9.
Настройка прибора
Можно предложить следующий порядок настройки прибора.
Проверить правильность монтажа схемы и подать питание.
Измерить потребляемый ток. Он должен быть не более 15 мА.
Убедиться, что на выводе 3 микросхемы D1 присутствует меандр расчетной частоты (около 20 кГц для указанных выше номиналов конденсаторов C1 и C2 и стандартного датчика)
Удалить рамку прибора подальше от металлических предметов и нажать кнопку S0 «Сброс».
Убедиться в работоспособности органов индикации, поднося к датчику различные металлические предметы.
Работа с прибором
Если переключатель S1 замкнут, то прибор переходит в статический режим. В этом режиме при приближении катушки к ферромагнитной мишени начинают последовательно загораться светодиоды VD3, VD2, VD1. Если катушку приближать к неферромагнитному металлическому объекту, то будут последовательно загораться светодиоды VD5, VD6, VD7. К сожалению таким же образом прибор реагирует на железные предметы с большой площадью поверхности (например, консервная банка). Это связано с тем, что при воздействии на поисковую катушку в металлических ферромагнитных объектах возникает сразу два эффекта – эффект проводимости и ферромагнитный эффект. При некотором соотношении площади поверхности объекта к объему начинает преобладать эффект проводимости.
При размыкании переключателя S1 прибор переходит в динамический режим. В этом режиме катушка должна перемещаться над грунтом со скоростью примерно 0. 5-1 м/с. Местонахождение объекта в динамическом режиме находится методом “артиллерийской вилки” при проведении катушки над объектом дважды – слева направо и справа налево. В этом режиме важно почувствовать наименьшую скорость, с которой можно перемещать катушку. Это легко осваивается при недолгой тренировке. Индикация в динамическом режиме выглядит немного иначе. При передвижении катушки над ферромагнитным объектом сначала загораются светодиоды из “шкалы” VD5, VD6, VD7, а затем из “шкалы” VD3, VD2, VD1. При передвижении катушки над неферромагнитным объектом индикация работает наоборот.
5-1 м/с. Местонахождение объекта в динамическом режиме находится методом “артиллерийской вилки” при проведении катушки над объектом дважды – слева направо и справа налево. В этом режиме важно почувствовать наименьшую скорость, с которой можно перемещать катушку. Это легко осваивается при недолгой тренировке. Индикация в динамическом режиме выглядит немного иначе. При передвижении катушки над ферромагнитным объектом сначала загораются светодиоды из “шкалы” VD5, VD6, VD7, а затем из “шкалы” VD3, VD2, VD1. При передвижении катушки над неферромагнитным объектом индикация работает наоборот.
Как уже было указано выше, каждому светодиоду соответствует свой тон звуковой индикации. После непродолжительной работы с металлоискателем запоминаются “напевы”, характерные для разных типов мишеней. Это позволяет при поисках пользоваться преимущественно звуковой индикацией, что довольно удобно.
Перед началом работы в обоих режимах необходимо выставить оптимальную чувствительность прибора с помощью переменного резистора R6.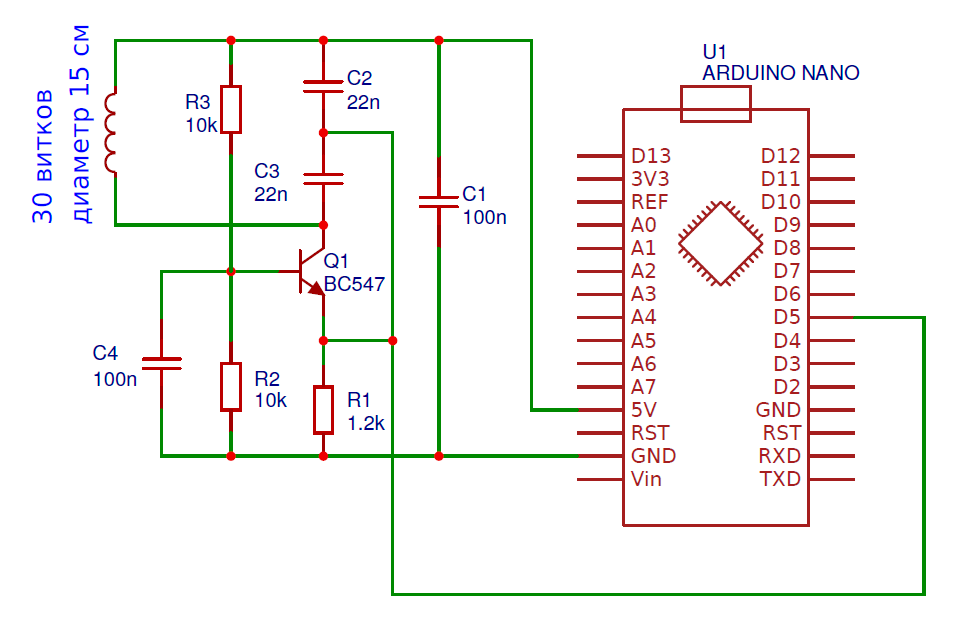 Он выставляется в такое положение, когда прибор начинает индицировать ложные отклики. Затем медленно вращая ротор этого резистора, необходимо добиться исчезновения этих ложных срабатываний.
Он выставляется в такое положение, когда прибор начинает индицировать ложные отклики. Затем медленно вращая ротор этого резистора, необходимо добиться исчезновения этих ложных срабатываний.
При прочих равных условиях динамический режим за счет фильтрации позволяет достичь лучшей чувствительности по сравнению со статическим режимом. Однако статический режим также бывает иногда необходим. Например, необходимо проверить дно узкой ямы. В этом случае нет возможности осуществлять горизонтальные качания поисковой катушки, которые необходимы для динамического режима. Здесь выручит статический режим.
Во время полевых испытаний металлоискатель показал неплохие результаты.
| Архив для статьи “Металлоискатель на микроконтроллере AVR” | |
| Описание: Файл прошивки микроконтроллера | |
Размер файла: 1. 52 KB Количество загрузок:
3 557 52 KB Количество загрузок:
3 557 |
Скачать |
Понравилась статья? Поделиться с друзьями:
13:10:50 [b]ЦИФРОВОЙ МЕТАЛЛОИСКАТЕЛЬ НА AVR МИКРОКОНТРОЛЛЕРЕ[/b] |
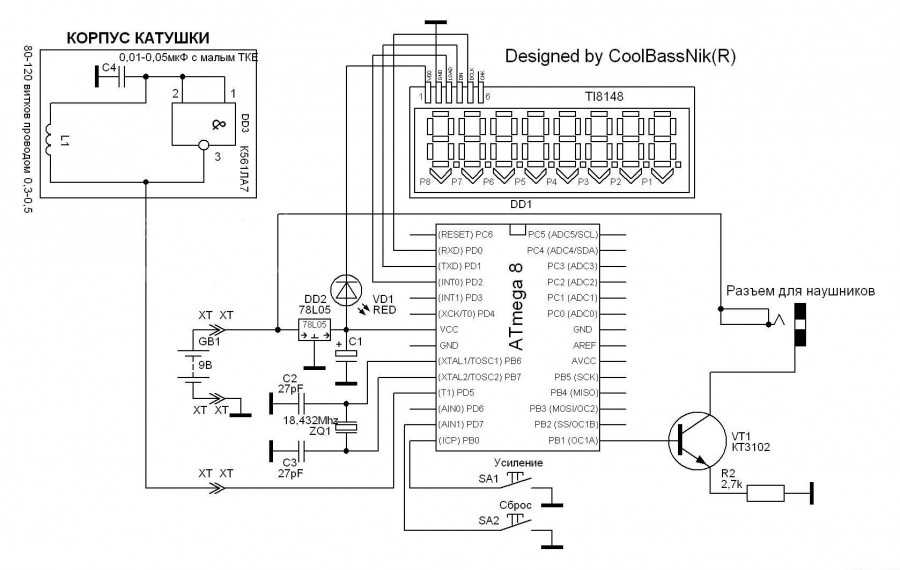
| ПРОСТОЙ ЦИФРОВОЙ МЕТАЛЛОИСКАТЕЛЬ НА AVR МИКРОКОНТРОЛЛЕРЕ источник: indikatop.ru Начну с пред истории… Схема простого маталлоискателя на микроконтроллере AVR показана на рисунке ниже: Устройство имеет как звуковую индикацию обнаруживаемых предметов, так и цифровую. Принцип работы устройства заключается в подсчете периода нескольких десятков импульсов, фильтрация данного значения, проход через условности автоматической коррекции и сброса а затем вывод на дисплей. Устройство работает в динамическом и статическом режиме с возможностью переключения режимов и огрубления чувствительности в каждом из них. Метало детектор обеспечивает обнаружение по воздуху, на расстоянии от центра поисковой катушки: * монета 1 копейка ————5см;
Внешний вид цифрового металлоискателя на микроконтроллере AVR Конструкция: Светодиод VD1 – красный , служит для питания дисплея от 3-х вольт, хотя его можно не ставить, а подключить напрямую. Дисплей работает и от 5В, но при этом длительная работа не гарантируется. Если применить 4 пальчиковые аккумулятора с суммарным напряжением 4,8В , то стабилизатор 78L05 можно не ставить, конденсатор C1 естественно тоже. Конденсатор для поисковой катушки нужно использовать с малым ТКЕ, желательно поставить тантал. Выдрал его из китайского радиоприемника (по моему). Емкость данного конденсатора не критична, рекомендуемая 0.01-0.05 мкФ , от этого зависит поисковая частота датчика. Катушку я мотал на 3-х литровой банке 80-120 витков, проводом 0,2-0,5 (тоже не критично). После намотки катушки на банку, снял и туго замотал ее скотчем для жесткости. Затем обязательно сверху намотать экран из медной или алюминиевой фольги. Намотка должна быть без просветов, с плотно прилегающими к друг-другу витками. От экрана делается отвод из медной проволоки, который припаивается затем к минусу источника питания. Конструкция поисковой катушки должна быть максимально жесткой, поэтому я свою засунул в распиленную пластиковую водопроводную трубу, и дополнительно обмотал скотчем. Прошивка:
Скачать прошивку микроконтроллера AVR для этого металло-детектора
|
 Данный проект несложен для самостоятельного изготовления и содержит минимум деталей для нормального функционирования устройства.
Данный проект несложен для самостоятельного изготовления и содержит минимум деталей для нормального функционирования устройства. Разъем для внутрисхемного программирования я сделал прямо на плате, чтобы не изворачиваться с вытаскиванием микроконтроллера, во избежание погнутых и поломанных выводов. Транзистор КТ3102 с любым буквенным индексом, он работает в режиме ключа и коэффициент усиления неважен, так же возможна замена транзистора на другой аналогичный N-P-N. Микроконтроллер ATmega8-16Mhz можно тактировать от внутреннего RC-генератора на максимальной частоте, при этом быстродействие в динамическом режиме может заметно ухудшиться, поэтому рекомендую все-таки поставить кварцевый резонатор.
Разъем для внутрисхемного программирования я сделал прямо на плате, чтобы не изворачиваться с вытаскиванием микроконтроллера, во избежание погнутых и поломанных выводов. Транзистор КТ3102 с любым буквенным индексом, он работает в режиме ключа и коэффициент усиления неважен, так же возможна замена транзистора на другой аналогичный N-P-N. Микроконтроллер ATmega8-16Mhz можно тактировать от внутреннего RC-генератора на максимальной частоте, при этом быстродействие в динамическом режиме может заметно ухудшиться, поэтому рекомендую все-таки поставить кварцевый резонатор. При не подходящем конденсаторе значения на дисплее будут сильно “скакать”. Я использовал конденсатор типа “зеленый приплюснутый бочонок” залитый чем-то похожим на зеленый эпоксидный клей.
При не подходящем конденсаторе значения на дисплее будут сильно “скакать”. Я использовал конденсатор типа “зеленый приплюснутый бочонок” залитый чем-то похожим на зеленый эпоксидный клей. 
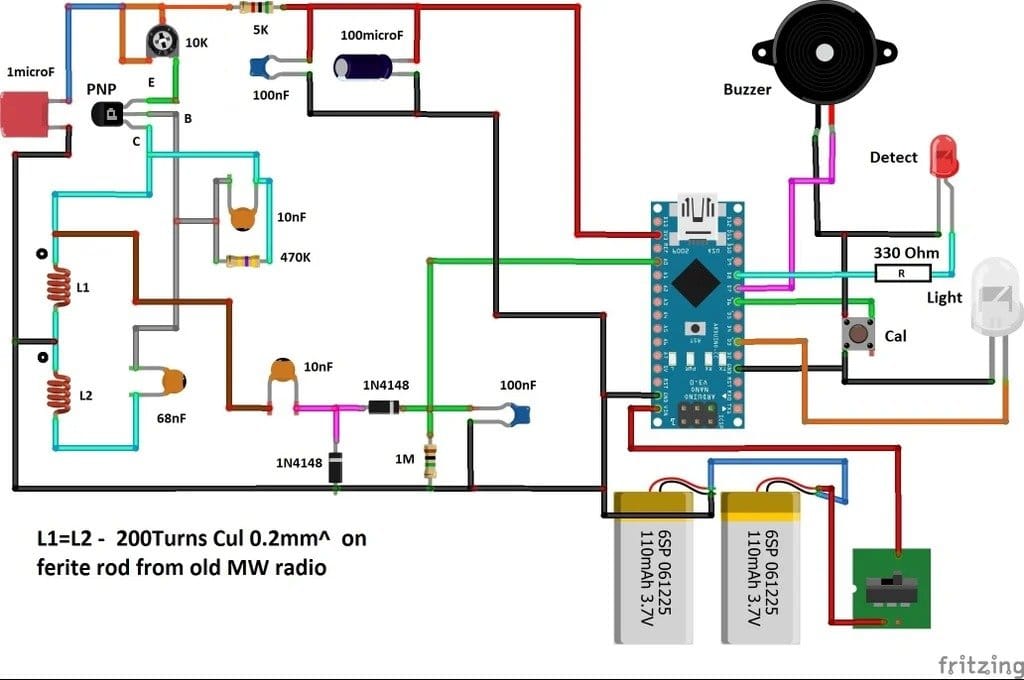
Радиочастотный роботизированный автомобильный детектор металла с использованием 8051
Наземные мины, закопанные под землю, представляют угрозу для жизни и влияют на экономику страны. Обнаружение и удаление этих мин вручную является опасной задачей, которая иногда может привести к несчастным случаям. В таких ситуациях роботы помогают в обнаружении фугасов. Эти роботы могут использоваться не только для наземных мин, но и для обнаружения любых других металлов, присутствующих в земле. В этой статье рассказывается о роботе для обнаружения металла, использующем радиочастотную технологию. Прежде чем узнать об этом роботизированном транспортном средстве металлоискателя, получите представление о как работает схема металлоискателя .
Схема
Беспроводной робот-детектор металла Принцип схемы: Предлагаемая система состоит из схемы передатчика и приемника. Схема передатчика передает команды, необходимые для работы робота. Схема приемника получает эти команды через РЧ и перемещает робота в соответствии с полученными командами. Металлодетектор сопряжен с контроллером на стороне приемника. Таким образом, всякий раз, когда обнаруживается какой-либо металл, робот останавливается и начинает звонить зуммер.
Схема передатчика передает команды, необходимые для работы робота. Схема приемника получает эти команды через РЧ и перемещает робота в соответствии с полученными командами. Металлодетектор сопряжен с контроллером на стороне приемника. Таким образом, всякий раз, когда обнаруживается какой-либо металл, робот останавливается и начинает звонить зуммер.
Аппаратные компоненты:
- Микроконтроллер AT89c51.
- Радиочастотный кодер и декодер
- Пара РЧ-передатчика и приемника.
- Кнопки.
- Зуммер.
- Робот.
- Л293д Кабель
- RS 232.
Программные компоненты:
- Программное обеспечение Keil
- Магия вспышки
- Протей.
Проект робота-металлоискателя можно разделить на секции 1) Секция передатчика, 2) Секция приемника.
Секция передатчика состоит из РЧ-энкодера, РЧ-передатчика и кнопок. Здесь используется микросхема RF-кодировщика HT12E. Это 18-контактная микросхема. 4-битный двоичный вход подается на декодер через контакты AD0, AD1, AD2, AD3. Вывод TE разрешает передачу при низком уровне. A0-A7 — адресные выводы, используемые для защищенной передачи. Эти контакты подключены к земле в цепи передатчика. 4-битные данные передаются на РЧ-передатчик параллельно. Это передается на радиочастотный приемник последовательно. Ввод подается на энкодер с помощью кнопок. ВЧ-пара работает на частоте 434 кГц.
Секция приемника состоит из микроконтроллера AT89c51, радиочастотного декодера, радиочастотного приемника, металлоискателя, зуммера, микросхемы L293d и робота.
Полученные данные применяются к декодеру RF. Используемый здесь радиочастотный декодер — HT12D. Декодированные входы подключены к порту 2 микроконтроллера. Четыре контакта данных D0-D3 подключены к порту P2.0 – P2.3. Декодированные данные подаются на микроконтроллер, который управляет движением робота. Зуммер подключен к порту 3.4 и звонит, когда на его пути обнаруживается любой металл.
Используемый здесь радиочастотный декодер — HT12D. Декодированные входы подключены к порту 2 микроконтроллера. Четыре контакта данных D0-D3 подключены к порту P2.0 – P2.3. Декодированные данные подаются на микроконтроллер, который управляет движением робота. Зуммер подключен к порту 3.4 и звонит, когда на его пути обнаруживается любой металл.
Металлоискатель подключается к выводу 3.2 микроконтроллера. Здесь вместо металлоискателя подключена кнопка. Металлоискатель играет главную роль в схеме. Внутри него будет осциллятор, который производит переменный ток, который проходит через катушку, создавая переменное магнитное поле. Когда рядом с катушкой находится какой-либо металл, это индуцирует магнитное поле, и поэтому его можно обнаружить, используя другую катушку, которая обнаруживает изменение поля.
L293d – это микросхема управления двигателем. Эта микросхема используется для управления двигателями. L293d имеет внутренний h-мост. Чтобы узнать больше об этой ИС, обратитесь к L293D Datasheet .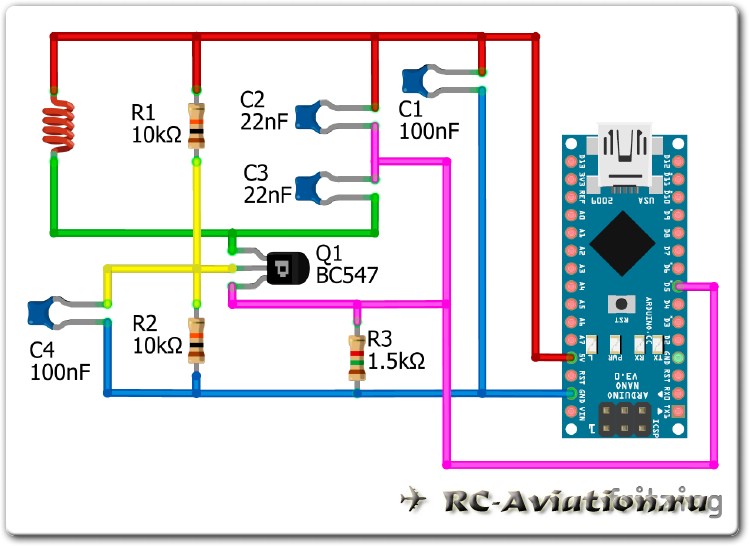
- Первоначально запишите код в микроконтроллер с помощью флэш-памяти магия.
- Теперь включите питание схемы.
- Теперь отправьте команду «1» с помощью передатчика.
- Это передается получателю.
- На стороне приемника приемник получает эти команды и перемещает робота в соответствии с командами.
- Следующие команды перемещают робота в заданных направлениях
- Вперед
- Назад
- Левый
- Право
- Во время движения робота, если на его пути обнаруживается какой-либо металл, робот останавливается на этом месте, подавая звуковой сигнал.
- Снова начинает движение при отправке команд с передатчика.
- Сначала объявите порт 2 в качестве входа, как показано ниже. подключен к декодированному входу.
- Теперь объявите порт 1 выходным, так как выводы двигателя робота подключены к порту 1.
- Включить внешнее прерывание.
- Теперь проверьте ввод порта2.
- Если полученное значение равно 1, то переместите робота в прямом направлении, сделав значение порта равным 0x01. Аналогичным образом переместите робота в соответствии с введенным значением.
- При возникновении прерывания установите на выходные контакты двигателя низкий уровень. Это написано в ISR.
- Эти роботы используются для обнаружения наземных мин.
- Роботы используются для обнаружения минералов, присутствующих в земле.
- Эти роботы используются для обнаружения бомб.
- Их можно использовать в строительной отрасли для обнаружения стальных стержней в бетоне.
- Они используются в аэропортах и службах безопасности зданий для обнаружения оружия.
Передатчик может управлять роботом только в радиочастотном диапазоне, который составляет примерно 30 метров.
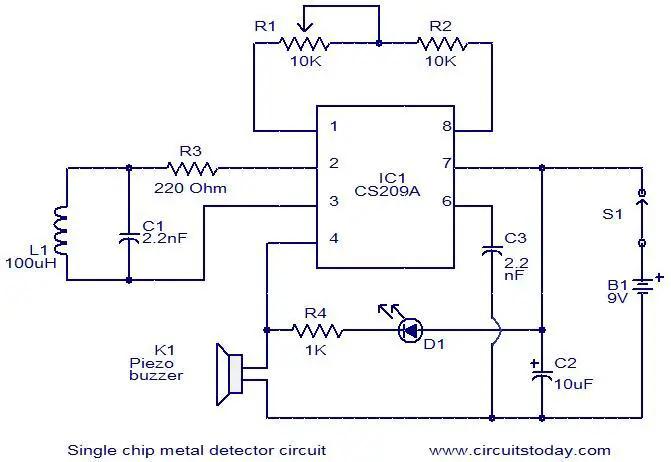
Схема металлодетектора
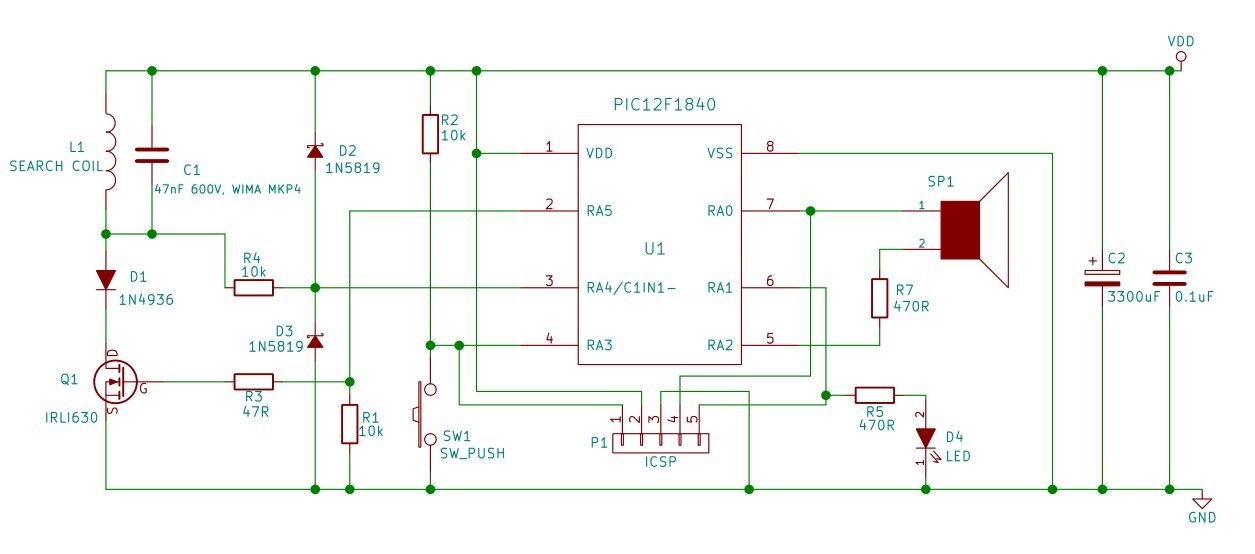
Самодельный металлодетектор с микроконтроллером PIC12F1572 (или PIC12F1840).
Это открытый самодельный аппаратный проект. На основе этой схемы можно сделать как пинпоинтер, так и полноразмерный металлоискатель.
Портировано на PIC12F1572 6.08.2107. PIC12F1840 также можно использовать.
Рисунок 1. Это схема:
Характеристики:
- Очень легко собрать.
- Поисковая катушка представляет собой простую монокатушку, не требующую регулировки.
 Просто используйте стандартную катушку индуктивности или самостоятельно намотайте несколько витков провода и приступайте к поиску.
Просто используйте стандартную катушку индуктивности или самостоятельно намотайте несколько витков провода и приступайте к поиску. - Обнаружение режима движения, алгоритм поиска автоматически адаптируется к параметрам катушки и определяет их изменение во времени. Так что ручной настройки нет.
- Различие между разными металлами. Цветные металлы имеют более низкий тон, чем черные металлы.
- Светодиодная индикация включения питания.
- Кнопочный выключатель ВКЛ/ВЫКЛ
- Низкое энергопотребление 20-50 мА
- Работает напрямую от 4 NiMH аккумуляторов
- Базовые функции дискриминации. Золото звучит немного иначе, чем железо.
- Разъем внутрисхемного программирования (ICSP) для простой загрузки прошивки. НОВЫЙ!
Я продолжаю преследовать свою первоначальную цель: максимально упростить схему с минимальным количеством компонентов, но при этом обеспечить хорошую чувствительность. Причина, по которой я публикую все подробности, заключается в том, что я хочу, чтобы другие также получили пользу от тяжелой работы, которую я уже проделал.
Файлы проекта:
Версия 3.00:
- Схема в формате pdf здесь:metaldetector.pdf
- Черно-белая версия схемы (лучше для печати): metaldetector_bw.pdf
- Список деталей:partslist.pdf
- Файлы проекта Kicad (схема и плата Ver3.00): Kicad_project_files
Быстрая ссылка на техническое описание PIC12F1840:41441B.pdf
Исходный код микропрограммы версии 1.80: firmware180.zip; HEX-файл для PIC:metaldetector_hex.zip
Катушка:
Эта схема протестирована на работу с различными катушками. Программный алгоритм автоматически адаптируется к параметрам катушки.
Основная катушка диаметром 20 см, 27 витков по 0,74 мм 2 Провод медный электромонтажный. Обычный медный провод с изоляцией диаметром 0,5 мм или меньше также подходит. В интернете есть много хороших инструкций по изготовлению катушек.
Индуктивность катушки в цепи дана только для справки. Вы можете использовать различные катушки с различной индуктивностью. Цепь должна работать. Возможно, разумный диапазон составляет от 150 мкГн до 470 мкГн. Сопротивление катушки в пределах от 0,25 до 2 Ом.
Цепь должна работать. Возможно, разумный диапазон составляет от 150 мкГн до 470 мкГн. Сопротивление катушки в пределах от 0,25 до 2 Ом.
Для пинпоинтера предпочтительно использовать стандартную катушку с ферритовым сердечником. Я обнаружил, что 470 мкГн и 1,8 А 0,28 Ом работают нормально.
Фон:
Однажды я решил, что мне нужен металлоискатель. Мотивация к этому возникла из-за того, что я неоднократно распиливал спрятанный внутри дерева металл моей бензопилой и испортил цепь пилы. Логичным шагом было приобрести металлоискатель. Затем я исследовал рынок металлоискателей. И, конечно же, обнаружил, что дешевые, вероятно, дерьмо, а лучшие я не могу себе позволить. Потом поискал в сети металлоискатели своими руками. Вскоре я понял, что все доступные схемы не для меня. Что ж, микроконтроллеры существуют всегда, и эти маленькие устройства такие дешевые и относительно мощные. Так зачем создавать металлоискатель древней конструкции с несколькими операционными усилителями, кучей резисторов и других компонентов.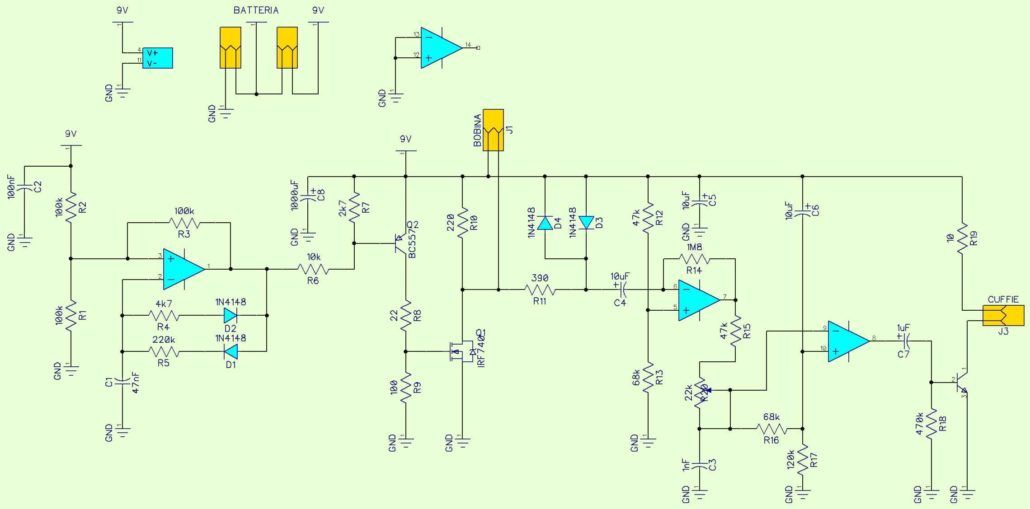 Конечно, сегодня мы можем добиться большего успеха — мы можем сделать это с одним 8-контактным микроконтроллером PIC и очень небольшим количеством внешних компонентов! Думаю, когда-нибудь я сделаю отдельную статью о своей лесопильной системе.
Конечно, сегодня мы можем добиться большего успеха — мы можем сделать это с одним 8-контактным микроконтроллером PIC и очень небольшим количеством внешних компонентов! Думаю, когда-нибудь я сделаю отдельную статью о своей лесопильной системе.
Итак, вот как построить хороший металлоискатель, заплатив только за микроконтроллер, все остальные компоненты и провод катушки можно достать из валяющейся повсюду электроники, и если вы хотите самостоятельно запрограммировать PIC, вам понадобится программатор, совместимый с PIC12F1840. Я лично использую PICKIT3. Я купил PICKIT3, потому что, к сожалению, обнаружил, что PIC12F1840 не поддерживается моими программистами JDM и Parallel TAIT. Если у вас нет программатора, вы можете приобрести предварительно запрограммированный микроконтроллер в моем магазине.
Техническое описание:
Я называю этот детектор типа “Затухание импульсных колебаний” или просто “ Детектор импульсных колебаний “. В принципе, он вдохновлен широко известными детекторами импульсной индукции.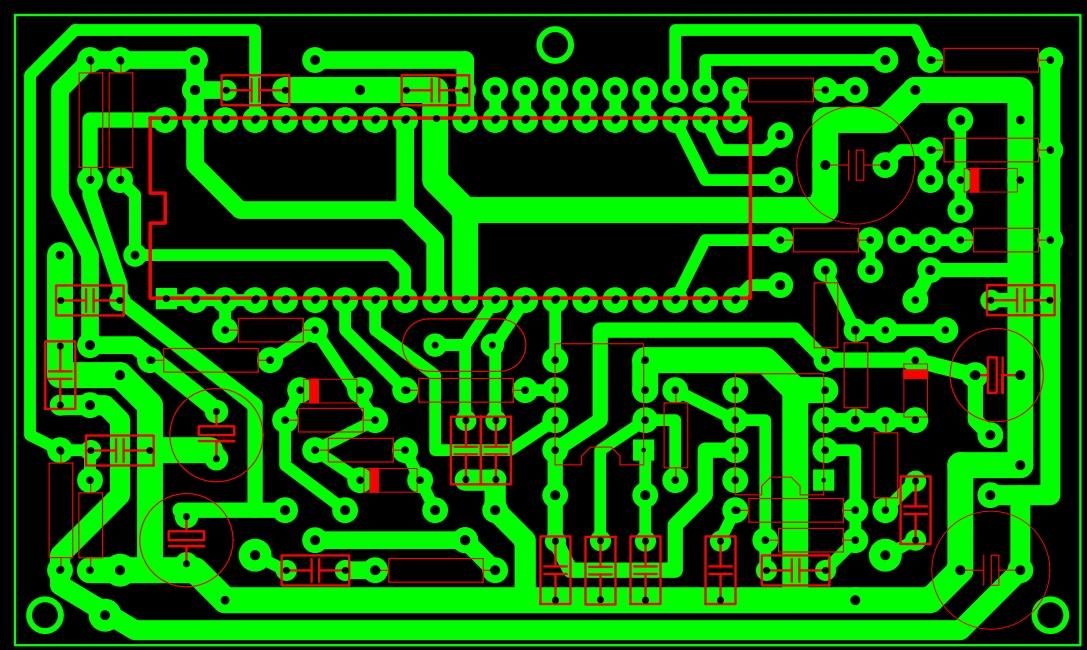 Импульс тока подается на катушку, а затем измеряется отклик. В моей схеме детектора катушка не сбрасывается демпфирующим резистором, как в обычных детекторах с импульсной индукцией. На катушку подается импульс сильного тока, и после прекращения импульса в колебательном контуре, образованном поисковой катушкой и параллельным ей конденсатором, возникают колебания. Это колебание, между прочим, относительно ВЫСОКОЕ НАПРЯЖЕНИЕ. Поэтому вся цепь должна быть хорошо изолирована, чтобы избежать поражения электрическим током! В этом случае колебание, конечно, быстро затухает из-за потерь и из-за того, что подача энергии в цепь прекращается. В основном это постоянные резистивные потери в цепи генератора, а кроме того есть потери на ВИХРЕВЫЕ ТОКИ в возможной металлической мишени. Микроконтроллер просто должен измерить время затухания, чтобы обнаружить различия в потерях цепи генератора. И в любом случае, если резистивные потери постоянны, любое другое изменение времени затухания означает, что рядом с катушкой находится МЕТАЛЛИЧЕСКАЯ МИШЕНЬ.
Импульс тока подается на катушку, а затем измеряется отклик. В моей схеме детектора катушка не сбрасывается демпфирующим резистором, как в обычных детекторах с импульсной индукцией. На катушку подается импульс сильного тока, и после прекращения импульса в колебательном контуре, образованном поисковой катушкой и параллельным ей конденсатором, возникают колебания. Это колебание, между прочим, относительно ВЫСОКОЕ НАПРЯЖЕНИЕ. Поэтому вся цепь должна быть хорошо изолирована, чтобы избежать поражения электрическим током! В этом случае колебание, конечно, быстро затухает из-за потерь и из-за того, что подача энергии в цепь прекращается. В основном это постоянные резистивные потери в цепи генератора, а кроме того есть потери на ВИХРЕВЫЕ ТОКИ в возможной металлической мишени. Микроконтроллер просто должен измерить время затухания, чтобы обнаружить различия в потерях цепи генератора. И в любом случае, если резистивные потери постоянны, любое другое изменение времени затухания означает, что рядом с катушкой находится МЕТАЛЛИЧЕСКАЯ МИШЕНЬ.
Частота колебаний катушки примерно определяется индуктивностью катушки и емкостью параллельного конденсатора. Частота также незначительно меняется в зависимости от свойств целевого металла. Целевые объекты из ферромагнитного металла уменьшают частоту свободных колебаний, а немагнитные металлы увеличивают частоту колебаний. Таким образом, с помощью этого метода даже можно различать цели, и эта функция включена в последнюю прошивку.
Максимальное напряжение колебаний также зависит от значения C1. Конденсатор C1 выбран таким образом, чтобы напряжение на катушке никогда не превышало 150 В, номинальное напряжение МОП-транзистора. Мосфет, который я использую в последней рабочей установке, – IRLI630. Большинство приводов логического уровня и полевые транзисторы на 150 В должны работать. Следует избегать лавины Mosfet, возможно, это не очень стабильная рабочая область. МОП-транзисторы с более высоким напряжением всегда имеют большее сопротивление в открытом состоянии, что, в свою очередь, ограничивает максимальный ток для данного напряжения питания.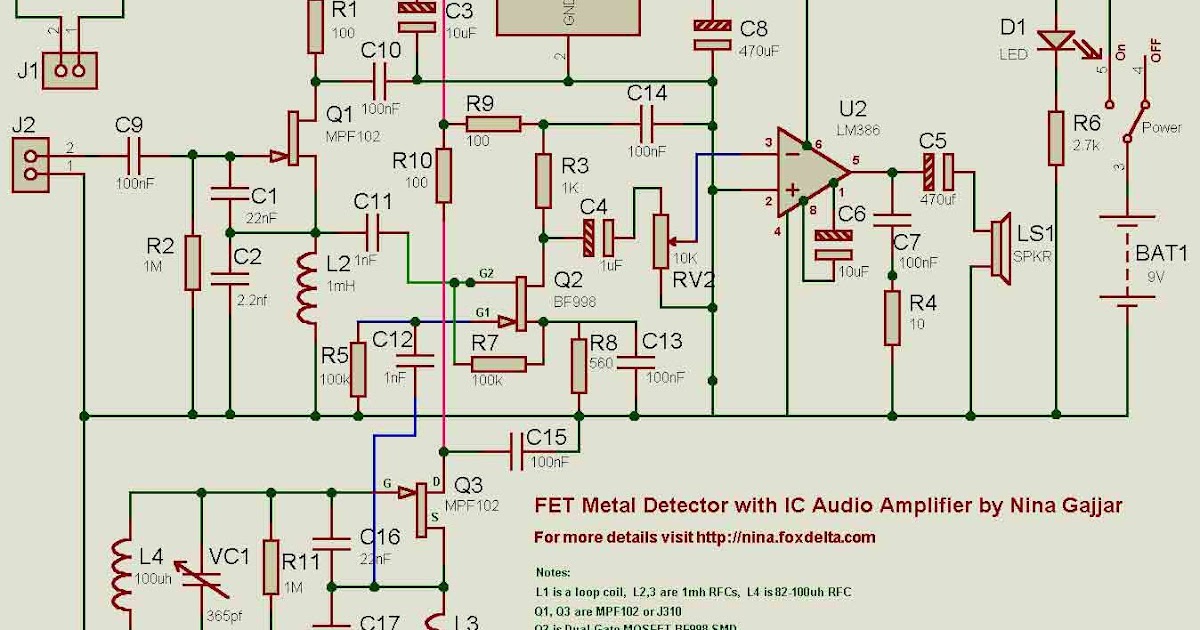 Разумно выбрать мосфет-транзистор с максимальным напряжением 200В, если напряжение питания 4,8В от 4 NiMH ячеек.
Разумно выбрать мосфет-транзистор с максимальным напряжением 200В, если напряжение питания 4,8В от 4 NiMH ячеек.
Рис. 2. Одноимпульсное напряжение поисковой катушки.
В моей конструкции импульсы возникают с интервалом в 2 миллисекунды. Длительность импульса 140 мкс. Синхронизация импульсов контролируется микроконтроллером PIC, а полевой МОП-транзистор напрямую управляется выходным контактом PIC через R3. Импульсный ток катушки ограничивается только сопротивлением MOSFET во включенном состоянии и сопротивлением поисковой катушки. Это делает импульсный ток как можно более высоким — больше чувствительности. В то же время, поскольку импульсы очень короткие, среднее потребление тока в цепи очень низкое – нет необходимости носить с собой огромные батареи.
Используйте ТОЛЬКО 4 элемента NiMH или NiCd для питания этой цепи! Схема ограничения напряжения питания отсутствует, а напряжение четырех щелочных батарей будет 6В, что слишком много для PIC-микроконтроллера!
Повторяю: эта схема предназначена для использования 4 последовательно соединенных элементов NIMH (AA или AAA) для питания.
Рисунок 3. Блок-схема стороны приемника:
Это эквивалентная схема того, что происходит внутри PIC12F1840. Внутренние функции PIC настроены, как показано. Входной контакт настроен на вход компаратора, + вход компаратора внутренне подключен к цифро-аналоговому преобразователю, который обеспечивает опорное напряжение, возможны 32 уровня напряжения между V+ и V-. Выход компаратора внутренне подключен к затвору TIMER1. Эта полезная функция позволяет Таймеру 1 считать только при высоком уровне выходного сигнала компаратора. Затем программа активирует Таймер 1 сразу после окончания импульса катушки и считывает значение с таймера перед запуском нового импульса. И это наше измерение. Timer1 работает на системной частоте 32 МГц и имеет разрешение 31,25 нс.
Конечно, мы не можем допустить, чтобы сигнал высокого напряжения достиг микроконтроллера. Вот почему существует ограничивающая цепь R4,D2,D3. Диоды Шоттки D2 и D3 сбрасывают избыточное напряжение на шины питания.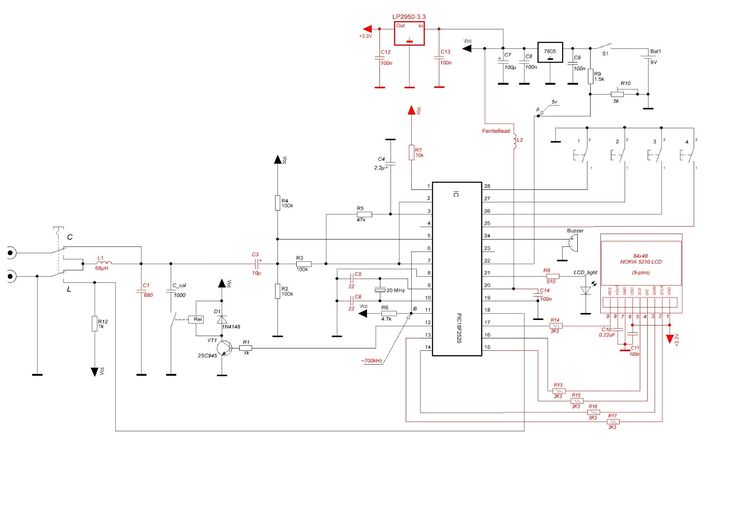 Таким образом, напряжение, поступающее на вход PIC, всегда находится в диапазоне напряжения питания. Диоды D2 и D3 должны быть типа Шоттки, обычные диоды не достаточно быстродействующие и скорее всего выйдет из строя микроконтроллер. Чтобы быть точным, я также попробовал схему без диодов D1 и D2, и она, похоже, работала хорошо из-за внутренних защитных диодов PIC, но слишком мало тестов, чтобы рекомендовать это.
Таким образом, напряжение, поступающее на вход PIC, всегда находится в диапазоне напряжения питания. Диоды D2 и D3 должны быть типа Шоттки, обычные диоды не достаточно быстродействующие и скорее всего выйдет из строя микроконтроллер. Чтобы быть точным, я также попробовал схему без диодов D1 и D2, и она, похоже, работала хорошо из-за внутренних защитных диодов PIC, но слишком мало тестов, чтобы рекомендовать это.
Рис. 4. Форма сигнала ограниченного напряжения на входе микроконтроллера.
Обратите внимание, что верхняя часть колебания почти полностью ограничена, а нижняя часть ограничена отрицательным питанием V-. Центром колебаний является положительное питание V+.
Прошивка:
Прошивка PIC теперь написана на ассемблере с использованием среды MPLAB X. Когда я начинал проект, я использовал MPLAB IDE v8.83.
Прошивка доводит этот маленький микроконтроллер до предела скорости и в полной мере использует встроенные периферийные устройства PIC. Благодаря превосходным возможностям управления питанием PIC-микроконтроллера стало возможным исключить физическую схему переключателя питания. Все функции управляются одной кнопкой. Когда схема выключена, PIC находится в спящем режиме, и потребление тока практически отсутствует. Во всяком случае, саморазряда намного меньше, чем у NiMH аккумуляторов.
Благодаря превосходным возможностям управления питанием PIC-микроконтроллера стало возможным исключить физическую схему переключателя питания. Все функции управляются одной кнопкой. Когда схема выключена, PIC находится в спящем режиме, и потребление тока практически отсутствует. Во всяком случае, саморазряда намного меньше, чем у NiMH аккумуляторов.
Генератор звука использует только таймер 2 для переключения выходов динамиков. Динамик подключен между двумя выходами, потому что это создает своего рода мостовую схему, напряжение удваивается, звук становится сильнее, а сигнал не имеет постоянного смещения.
Используемые ресурсы PIC: прерывания, прерывание при изменении, спящий режим, ЦАП, компаратор, все таймеры (Timer0, Timer1, Timer2).
Активная версия 2.00:
Особенности:
- Небольшое различие между различными металлами. Цветные металлы имеют более низкий тон, чем черный металл (железо).
- Одно нажатие кнопки включает детектор.
- Двойное нажатие на кнопку изменяет режим работы.
 Имеется 4 режима:
Имеется 4 режима:
- Режим дискриминации, стандартный звук включения/выключения
- постепенный звуковой сигнал (индикация расстояния), теперь с дискриминацией
- режим дискриминации, менее фильтрованный, чем режим 1
- беззвучный режим, только светодиод вкл/выкл
- Более длительное нажатие на кнопку выключает детектор
Исходный код версии 2.00 (для PIC12F1572) весь проект MPLAB X:PIC_program_12F1572.X.zip
Исходный код прошивки версии 1.80: firmware180.zip HEX-файл для PIC:HEX-файл (для PIC12F1840)
Старые версии ( еще нет дискриминации ):
версия 1.25 с интерфейсом связи RS232 (COM-порт) (10.01.2013) исходный код ассемблера: PO_metaldetector125.zip ver1.25 шестнадцатеричный файл: metaldetector125.hex режим, более длительное нажатие выключает питание.
ver1.10(22.12.2012):metaldetector110.asm ver1.10 шестнадцатеричный файл:metaldetector110.hex Это не рекомендуемая версия, но я пока оставлю ее здесь.
Версия 1.00 :metaldetector100.asm Вер1.00 шестнадцатеричный файл :metaldetector100.hex самая базовая версия, но работает. Никакой дискриминации.
Печатная плата (PCB):
В настоящее время разработано три версии печатных плат.
V1.00 Первая версия была односторонней платой.
Версия V2.00 была двухсторонней платой (фактически по дизайну может работать только с нижним слоем), но когда я разработал вторую версию, я преобразовал ее в более новую версию Kicad и перерисовал схему, и случайно поменял местами подключение светодиода и подключение пьезодинамика к контактам PIC (5;6). Поэтому для версии 2.00 нужна слегка модифицированная прошивка. Но я уже успел заказать кучу таких плат на заводе печатных плат. Ни одна из этих досок не отправлена из моего магазина.
V3.00 — двусторонняя плата. Совместим с версией 1.00 со следующими улучшениями:
- C2 и Q1 установлены горизонтально, что позволяет установить схему внутри трубки.
- теперь имеет монтажные отверстия в углах
- крепление переключателя в центральном положении для лучшего крепления стержня кнопки
- Разъем ICSP
Я рекомендую, чтобы PIC был подключен к сокету, хотя плата версии 3 имеет возможность “In Circuit Serial Programming” (ICSP). Размеры печатной платы 30 х 60 мм.
Печатные платы и комплекты деталей также доступны в моем магазине.
Вклад пользователей:Вот отличная статья Роберта Бейти KF7FTQ о конструкции его катушки и детектора. С его любезного разрешения файл в формате pdf: my_md_article.pdf (5,5Mb)
Вот видео одной из возможных приличных конструкций на ютуб-канале Frozen Toes Entertainment: https://www.youtube.com/watch?v=nS4GWuD5Dk8
Ссылки:
Обсуждение и резервирование информации в форумах:
http://www.geotech2.com/forums/showthread.php?19935-my-pulse-ocillation-detector-proj Ouct-T38721.0 .html
для общей электроники и микроконтроллеров: http://www.