Металлоискатель своими руками avr: Металлоискатель Clone PI AVR (Клон ПИ АВР) своими руками – Мир искателей
alexxlab | 07.04.2023 | 0 | Разное
Металлоискатель Clone PI AVR (Клон ПИ АВР) своими руками – Мир искателей
Clone Pi AVR это упрощенная и усовершенствованная версия, популярного у радиолюбителей металлоискателя Clone PI. Так как при изготовлении металлоискателя Clone PI у многих возникали трудности с приобретением АЦП, то в новой версии металлоискателя Клон АВР, Пик контроллер и внешнее АЦП, были заменены на доступный микроконтроллер фирмы AVR с внутренним АЦП Atmega8.
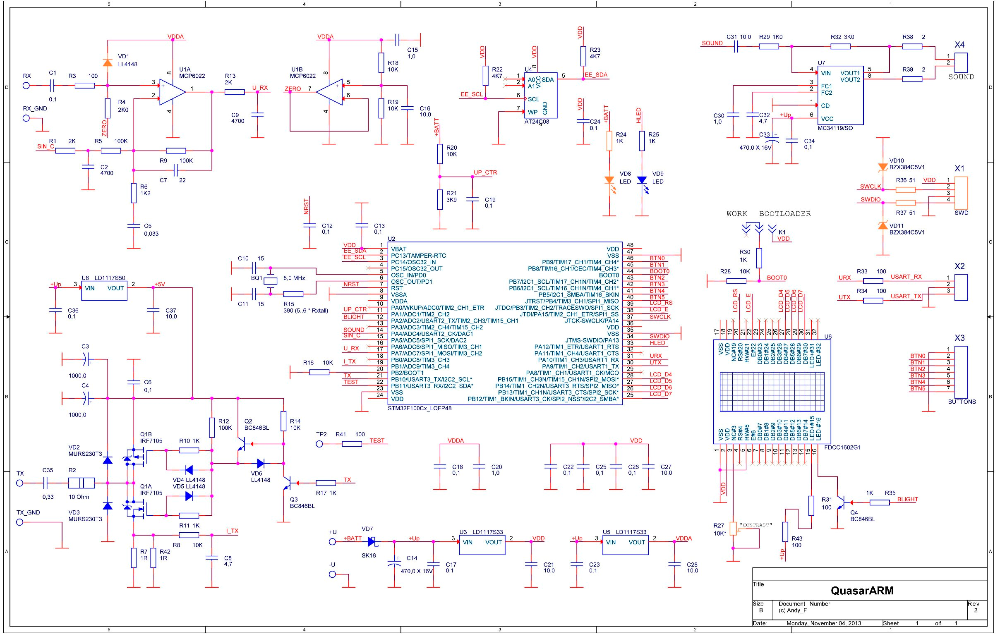
А также схема Clone PI AVR с указанными напряжениями постоянного тока
В интернете есть несколько вариантов разведения печатной платы для металлоискателя Клон Пи АВР. Ниже приведена фотография вполне приличной версии печатной платы .
Плата металлоискателя Clone PI AVR
В этом архиве вы можете скачать: разведенную печатную плату в формате *.lay, схему, прошивку и фотографии этапов изготовления платы металлоискателя.
Один из вариантов реализации платы металлоискателя Клон АВР:
Для прошивки микроконтроллера, биты конфигурации необходимо расставить следующим образом:
Металлоискатель Clone PI AVR имеет средний уровень сложности изготовления, из за наличия в схеме металлоискателя, программируемого микроконтроллера. Но в остальном его изготовление, не должно вызвать особых трудностей.
Но в остальном его изготовление, не должно вызвать особых трудностей.
Катушка для металлоискателя Clone PI AVR
С металлоискателем Clone PI AVR, можно использовать катушки от импульсных металлоискателей Tracker и Кощей, а также большие глубинные рамки.
Наиболее универсальные диаметры катушки 20-30 см. Такие катушки будут иметь глубину обнаружения 1 – 1,5 метра и сохранят чувствительность к небольшим металлическим объектам (монеты, украшения и т.д.).
Для изготовления универсальной поисковой катушки, вам необходимо на оправку 26-27 см, намотать 23-24 витка обмоточного эмаль провода диаметром 0.7-0.8мм. В качестве оправки можно использовать кастрюльку подходящего диаметра, или изготовить оправку как на фото ниже:
Для изготовления оправки, берем лист фанеры или ДСП. На нем, при помощи циркуля, чертим круг нужным нам диаметром. Затем берем шурупы или саморезы, одеваем на них кембрики . Шурупы с кембриками вкручиваем по периметру нашей окружности, и получаем оправку для намотки катушки.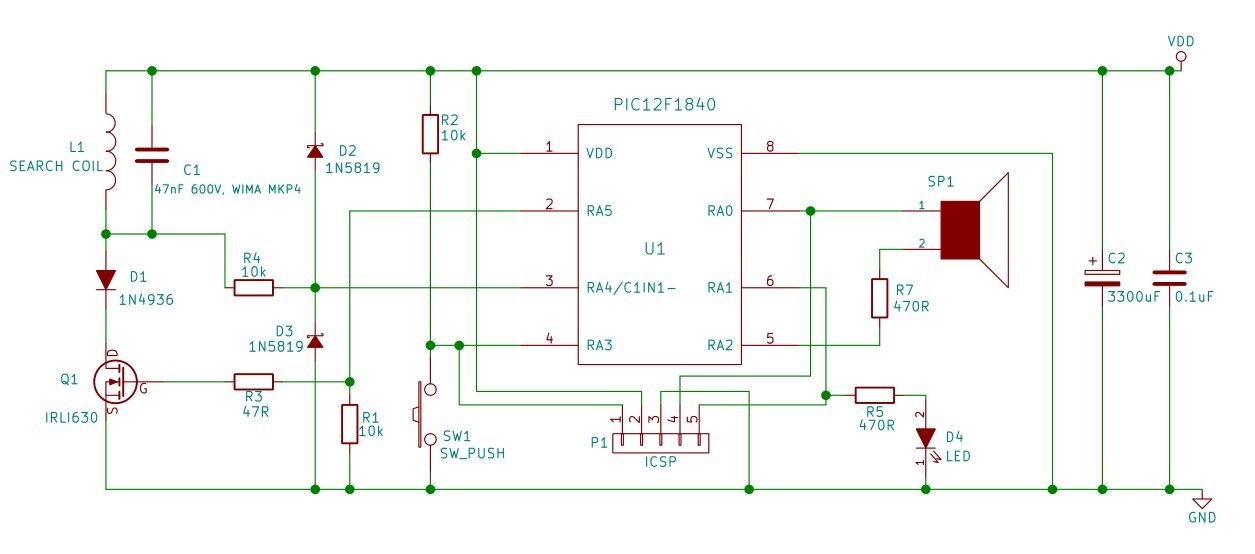
Катушка мотается в навал. Затем витки плотно сматываем между собой, скотчем, или изолентой. К концам обмотки подпаиваем провод 2*0.75 мм в изоляции.
Подключаем нашу катушку к плате металлоискателя Клон Пи АВР (Для подключения лучше использовать разъем) и проверяем ее работоспособность. Такая катушка подойдет для испытаний и экспериментов, но для реальной работы, ее следует защитить от ударов, влаги и т.д.
Для этого катушку необходимо закрепить в подходящий пластиковый корпус. Мы в своих конструкциях, используем вот такой универсальный корпус.
Катушка закрепляется внутри корпуса, при помощи термоклея, и затем корпус катушки заклеивается дихлорэтаном, или скручивается нержвеющими саморезами.
Для получения подводной катушки, корпус лучше заполнить эпоксидной смолой. Это уменьшит ее пловучести, и предотвратит поподание воды во внутрь корпуса.
Тут вы можете посмотреть другие способы изготовления катушек для импульсных металлоискателей Клон.
А в статье про глубинные металлоискатели описаны способы изготовления глубинных рамок для импульсных металлоискателей.
Прошивки для металлоискателя Clone PI AVR:
- Прошивка версии 1.7.3 для ATmega8 — CPI_PRG_173_AVR
- Прошивка версии 1.7.3A для ATmega8, с измененным алгоритмом автоподстройки грунта — CPI_PRG_173a_AVR
- Прошивка версии 1.8.0 для контроллера ATmega8 — CPI_PRG_180_AVRИзменения:
- Громкость озвучки кнопок приведена в соответствие с основной громкостью.
- Автоподстройка грунта (Ground adjust) теперь работает в 3-х режимах — adaptive, fixing и off(static).
- Защитный интервал теперь может подбираться при включении (auto), использоваться запомненное значение (last), или выбираться пользователем принудительно в диапазоне 2 … 80.
- Добавлен параметр Volume raise, позволяющий уменьшать громкость в начале шкалы (при слабых откликах). Это улучшает устойчивость схемы при низком пороге.

- Убран режим двойной мощности, показавший свою практическую бесполезность.
- При включённой подсветке на индикатор выводится буква «L» (Light).
- Прошивка версии 1.8.1 для контроллера ATmega8, в прошивки исправленны ошибки и снижено энергопотребление — CPI_PRG_181_AVR
Заключение: металлоискатель Clone PI AVR это проверенный и популярный среди радиолюбителей и поисковиков металлоискатель. Он имеет сопоставимую с заводскими металлоискателями глубину поиска и полностью открытую схему и прошивку для его изготовления. К недостаткам металлоискателя следует отнести завышенное энергопотребление.
Обзор готовой платы металлоискателя Клон ПИ АВРВидео запуска металлоискателя Clone PI AVR собранного своими руками, и возможности его настройки:
При написании этой статьи использовались материалы:
- Сайт разработчика — http://fandy.hut2.ru
- И этот сайт — http://metdet.ucoz.ua/publ/metalloiskatel_klon/1-1-0-13
- А также форум — http://md4u.ru/viewtopic.php?f=5&t=660 — тут вы можете задать вопросы по самостоятельной сборке металлоискателя.
Металлоискатель на микроконтроллере AVR – Микроконтроллеры и Технологии
С давних пор людей привлекают приборы для поиска скрытых металлических предметов. Причины этого интереса различны. Строителей интересует расположение металлической арматуры в стенах, искатели кладов мечтают найти в развалинах старого здания кувшин с золотыми монетами, саперы разыскивают неразорвавшиеся «подарки» прошлых войн. Всех этих людей объединяет желание иметь недорогой, компактный и экономичный прибор, который поможет им обнаружить через слой земли или бетона металлические предметы и, по возможности, определить из какого металла они состоят. Если исключить экзотические методы, вроде лозоискательства и экстрасенсов, то абсолютное большинство таких приборов строится на базе электронных приборов, реагирующих на изменение металлическими предметами электромагнитного поля возбуждаемого поисковым прибором. Наиболее часто в качестве катушки возбуждения и одновременно датчика прибора используется рамочная катушка, состоящая из нескольких сотен витков медного провода и включенная в контур автогенератора. В таких приборах используется тот эффект, что при приближении металлического предмета к катушке изменяется ее индуктивность и, как следствие, частота работы автогенератора. При этом, в общем случае, ферромагнитные предметы (железо, чугун) понижают частоту, а неферромагнитные (медь, золото, алюминий) повышают частоту генерации. Регистрируя величину и знак отклонения частоты, можно сделать заключение о типе металлического предмета, попавшего в зону поиска рамки. Основные различия между большинством типов таких металлоискателей заключаются в способах регистрации изменения частоты.
Если исключить экзотические методы, вроде лозоискательства и экстрасенсов, то абсолютное большинство таких приборов строится на базе электронных приборов, реагирующих на изменение металлическими предметами электромагнитного поля возбуждаемого поисковым прибором. Наиболее часто в качестве катушки возбуждения и одновременно датчика прибора используется рамочная катушка, состоящая из нескольких сотен витков медного провода и включенная в контур автогенератора. В таких приборах используется тот эффект, что при приближении металлического предмета к катушке изменяется ее индуктивность и, как следствие, частота работы автогенератора. При этом, в общем случае, ферромагнитные предметы (железо, чугун) понижают частоту, а неферромагнитные (медь, золото, алюминий) повышают частоту генерации. Регистрируя величину и знак отклонения частоты, можно сделать заключение о типе металлического предмета, попавшего в зону поиска рамки. Основные различия между большинством типов таких металлоискателей заключаются в способах регистрации изменения частоты.
Один из самых простых – это прибор, работающий по принципу “срыва резонанса” (OR – Off Resonance). Принцип действия этого прибора основан на использовании частотного детектора на основе колебательного контура. См. рис. 1.
Рисунок 1. Структурная схема OR металлоискателя
Колебательный контур частотного детектора имеет резонансную частоту, близкую к частоте поискового генератора. Изменение частоты генератора приводит к изменению амплитуды сигнала на контуре, что фиксируется помощью индикатора, например стрелочного прибора. Такие приборы не нашли широкого применения. Их недостатки – необходимость обеспечения стабильной амплитуды сигнала на выходе генератора, а также необходимость подстройки резонансной частоты контура из-за влияния дестабилизирующих факторов как на контур поискового генератора, так и на контур частотного детектора.
Метод биений
Другой прибор, – это металлоискатель на биениях (BFO – Beat Frequency Oscillation). Принцип действия такого металлоискателя основан на биениях частоты эталонного генератора и частоты поискового генератора. См рис. 2.
Рисунок 2. Структурная схема BFO металлоискателя
Измерительный и эталонный генераторы настраиваются на одинаковую частоту. При изменении частоты измерительного генератора на выходе смесителя появляется сигнал разностной частоты. Оператор воспринимает этот сигнал на слух или визуально – в зависимости от конструкции. Такие приборы производятся уже несколько десятилетий. Сейчас по такому принципу строятся, в основном, недорогие металлоискатели-игрушки и любительские металлоискатели. Такие приборы имеют ряд недостатков. Первый – это наличие паразитной взаимной синхронизации обоих генераторов. Это приводит к тому, что оказывается невозможным оценить очень малую разность частот и как следствие – существенно снижается чувствительность прибора.
Частотный детектор на основе ФАПЧ
Следующий прибор (PLL – Phase Locked Loop) – это прибор, в котором недостаток металлоискателя на биениях используется во благо. В таком приборе оба генератора, измерительный и эталонный, работают строго на одной частоте. Причем частота измерительного генератора подстраивается под частоту эталонного генератора с помощью системы ФАПЧ. См. рис. 3.
Рисунок 3. Структурная схема PLL металлоискателя
Сигнал напряжения подстройки используется для определения величины и знака изменения частоты. Такие металлоискатели обладают селекцией по типам металлов. Существует несколько радиолюбительских конструкций такого типа. К недостаткам таких приборов можно отнести следующее – наличие “полезной” ФАПЧ не исключает наличия паразитной взаимной синхронизации обоих генераторов, как и в приборе на биениях. Это приводит к тому, что уменьшается крутизна регулировочной характеристики, и как результат уменьшается дальность обнаружения.
К недостаткам таких приборов можно отнести следующее – наличие “полезной” ФАПЧ не исключает наличия паразитной взаимной синхронизации обоих генераторов, как и в приборе на биениях. Это приводит к тому, что уменьшается крутизна регулировочной характеристики, и как результат уменьшается дальность обнаружения.
Цифровой частотометр
Идея использования цифрового частотомера для регистрации ухода частоты измерительного генератора не нова. Такой металлоискатель (FM – Frequency Meter см. Рис.4.) свободен от большинства недостатков, присущих предыдущим схемам. Его принцип действия заключается в следующем:
Сначала электронный частотомер оценивает частоту измерительного генератора, когда датчик находится вдали от объектов поиска. Это значение заносится в запоминающий регистр. Затем, в процессе поиска, частотомер непрерывно измеряет текущую частоту измерительного генератора. Из полученных значений вычитается значение эталонной частоты, и результат подается на устройство индикации. Очевидно, что в такой конструкции эффект паразитной взаимной синхронизации генераторов будет выражен значительно слабее – ведь теперь частота измерительного генератора (единицы-десятки килогерц) на несколько порядков ниже частоты опорного генератора (десятки мегагерц). С помощью частотомера можно измерить не только величину ухода частоты измерительного генератора, но и ее знак, следовательно, такой металлоискатель обладает селективностью по типам металлов.
Очевидно, что в такой конструкции эффект паразитной взаимной синхронизации генераторов будет выражен значительно слабее – ведь теперь частота измерительного генератора (единицы-десятки килогерц) на несколько порядков ниже частоты опорного генератора (десятки мегагерц). С помощью частотомера можно измерить не только величину ухода частоты измерительного генератора, но и ее знак, следовательно, такой металлоискатель обладает селективностью по типам металлов.
Рисунок 4. Структурная схема FM металлоискателя
Однако реализация этой идеи “в лоб”, не позволяет получить реальную чувствительность, большую чем в приборе на биениях. Это связано с тем, что невозможно напрямую в реальном масштабе времени (20…40 мс на один отсчет) регистрировать очень малые уходы частоты (единицы и доли герц). Нам удалось решить эту проблему следующим образом – из теории радиоизмерений известен метод “быстрого” измерения низких частот – т.н. метод обратного счета. В этом методе измеряется период сигнала, а частота вычисляется как его обратная величина. Оставалась только задача практической реализации.
Оставалась только задача практической реализации.
Практическая конструкция металлоискателя
Очевидно, что если реализовывать такое устройство на элементах средней степени интеграции, то получится сравнительно сложный и громоздкий прибор, что для мобильного исполнения нежелательно. Выходом из этой ситуации стало применение микроконтроллера. На микроконтроллер оказалось возможно возложить не только задачу по измерению периода, но и практически все функции по обработке результатов – вычисление разности частот, звуковую и световую индикацию результатов измерений. Наш металлоискатель реализован на микроконтроллере AT90S2313-10PI производства фирмы Atmel.
Это 8-битный экономичный RISC микроконтроллер. Имеет на частоте 10 MHz производительность 10 MIPS. Содержит: 2 кБ флэш памяти, 128 байт EEPROM, 15 линий ввода/вывода, 32 рабочих регистра, два таймера/счетчика, сторожевой таймер, аналоговый компаратор, универсальный последовательный порт.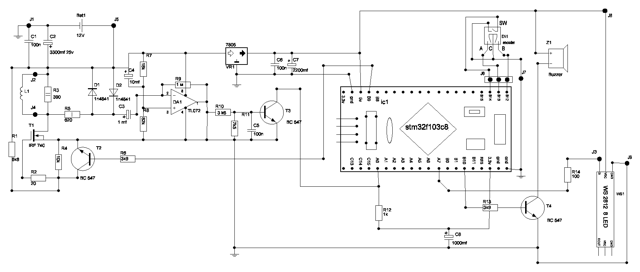 Более подробно с семейством AVR микроконтроллеров можно ознакомиться на сайте производителя.
Более подробно с семейством AVR микроконтроллеров можно ознакомиться на сайте производителя.
Основные технические характеристики металлоискателя
Напряжение питания: 5,5-20 В
Потребляемый ток: 15 мА
Индикация: световая – 7 светодиодов и звуковая
Режимы поиска: статический и динамический
Дискриминация: ферромагнетики/неферромагнетики
Глубина обнаружения (на воздухе):
Монета диаметром 25 мм: 11 см
“Пистолет”: 17 см
“Каска”: 37 см
Принципиальная схема
Принципиальная схема металлоискателя по принципу частотомера изображена рис.5.
Рисунок 5. Принципиальная электрическая схема металлоискателя
Измерительный генератор построен на таймере D1 NE555. Она используется в несколько необычном включении – в качестве LC генератора. Колебательный контур генератора состоит из конденсаторов C1,C2 и катушки индуктивности датчика. Резонансная частота контура определяется как:
где C – это последовательное соединение конденсаторов C1 и C2.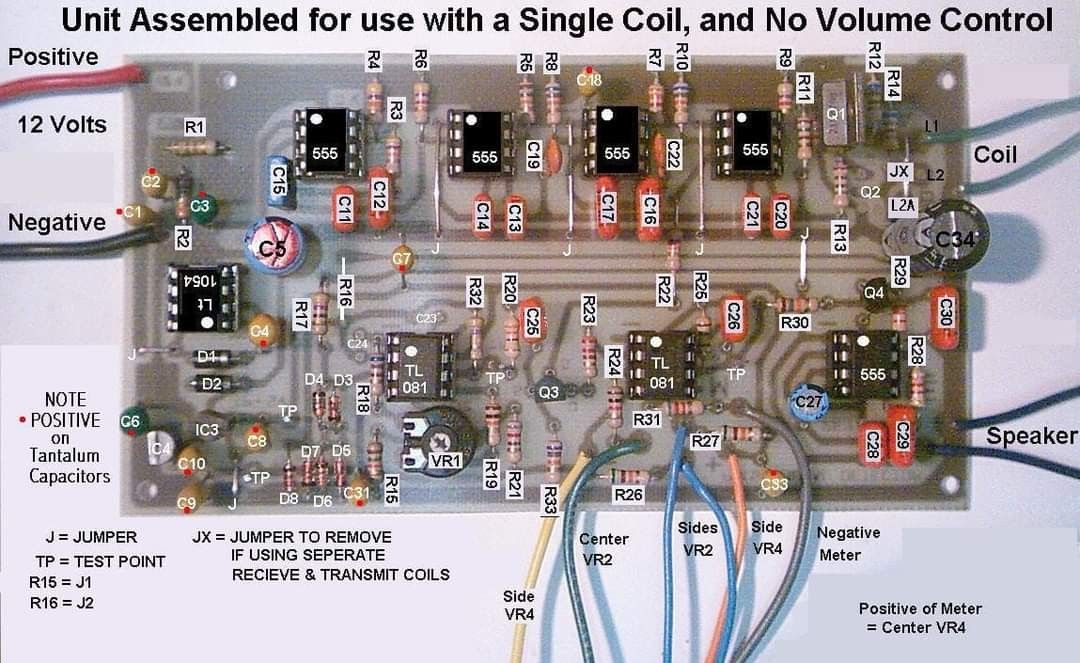 Так как микроконтроллер автоматически подстраивается под частоту измерительного генератора, в схеме не предусмотрена подстройка частоты генератора. При использовании датчика диаметром 190 мм (100 витков) и емкостях конденсаторов С1=0.047 F и C2=0.01 F частота составит около 20 кГц. При необходимости ее можно изменить, заменив конденсаторы C1, C2. При этом желательно чтобы их емкости находились в соотношении примерно (4…6): 1.
Так как микроконтроллер автоматически подстраивается под частоту измерительного генератора, в схеме не предусмотрена подстройка частоты генератора. При использовании датчика диаметром 190 мм (100 витков) и емкостях конденсаторов С1=0.047 F и C2=0.01 F частота составит около 20 кГц. При необходимости ее можно изменить, заменив конденсаторы C1, C2. При этом желательно чтобы их емкости находились в соотношении примерно (4…6): 1.
На микроконтроллер D2 возложены все остальные функции по обработке сигнала измерительного генератора вплоть до индикации. В данной схеме применен микроконтроллер AT90S2313, описанный выше. Исполнение Industrial (температурный диапазон -40C…+85C). Это сделано из соображений, чтобы прибор мог эксплуатироваться в полевых условиях при отрицательных температурах. Непосредственно к микросхеме микроконтроллера подключены как органы управления, так и органы индикации. В металлоискателе реализованы два режима работы, которые задаются при помощи переключателя S1 – статический и динамический. В статическом режиме сигнал, который представляет собой цифровой код разности частот, логарифмируется и сразу подается на индикацию. Каждый уровень световой индикации сопровождается своим тоном звуковой индикации.
В статическом режиме сигнал, который представляет собой цифровой код разности частот, логарифмируется и сразу подается на индикацию. Каждый уровень световой индикации сопровождается своим тоном звуковой индикации.
Динамический режим предназначен для поиска мишеней в сложных условиях, на фоне помех от грунта, минералов и т.д. В динамическом режиме сигнал подвергается цифровой фильтрации, которая выделяет полезный сигнал на фоне мешающих сигналов. В своем приборе мы применили оптимальную согласованную фильтрацию. Вкратце ее суть заключается в том, что для любого сигнала существует оптимальный фильтр, позволяющий получить максимальный отклик на выходе фильтра. Мы реализовали такой цифровой фильтр для сигнала расстройки частоты, который возникает при движении поисковой катушки над мелкими мишенями со скоростью 0.5-1 м/c. Фильтр реализован программно.
При помощи переменного резистора R6 регулируется чувствительность прибора. Светодиоды VD1…VD3 индицируют уровень отклонения частоты измерительного генератора в случае преобладания ферромагнитного эффекта. Светодиоды VD5…VD7 – в случае преобладания эффекта проводимости. Светодиод VD4 указывает на нулевой сдвиг частоты. Наушник Y предназначен для звуковой индикации отклонения частоты сигнала измерительного генератора.
Светодиоды VD5…VD7 – в случае преобладания эффекта проводимости. Светодиод VD4 указывает на нулевой сдвиг частоты. Наушник Y предназначен для звуковой индикации отклонения частоты сигнала измерительного генератора.
Схема содержит рекордно низкое количество деталей. При этом к ним не выдвигается особых требований. Микросхему AT90S2313-10PI можно заменить на AT90S2313-10PC, однако, в этом случае не гарантируется работа при температуре меньше 0C. (что вполне может быть в полевых условиях).
Микросхему D1 можно попробовать заменить на КР1006ВИ1. Светодиоды желательно выбирать с повышенной яркостью свечения. Стабилизатор D3 можно заменить на К1184ЕН1 или, что несколько хуже – 78L05. В последнем случае минимально допустимое напряжение батареи составит 6,7 В. К резисторам особых требований не предъявляется. Они могут иметь рассеиваемую мощность 0,125-0,25 Вт.
Конденсаторы C1 и C2 – должны иметь минимальный ТКЕ, особенно C2. К остальным конденсаторам не предъявляется особых требований.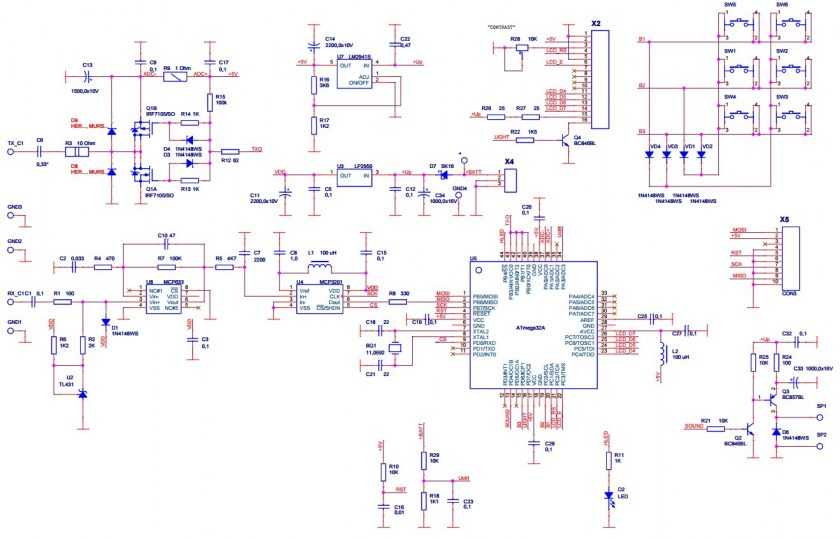
Наушник Y (или наушники) можно взять от плеера. Возможно потребуется подобрать номинал резистора R3 для получения приемлемой громкости. В крайнем случае, наушник можно заменить на пьезоизлучатель.
Конструкция корпуса прибора может быть достаточно произвольной.
Особо следует остановиться на конструкции поисковой катушки – она может быть реализована различными способами. Основные требования к ней – жесткость конструкции, герметичность и наличие электростатического экрана. Можно предложить следующую технологию изготовления катушки:
Берется доска подходящего размера и на ней рисуется окружность диаметром 190 мм. Затем равномерно по окружности в доску забиваются небольшие гвозди – 15…20 штук. На эти гвозди наматывается 100 витков эмалированного провода диаметром 0.3 – 0.56 мм. После намотки гвозди извлекаются или подгибаются и катушка снимается с оправки. Следующий этап – обмотка катушки изолентой. Обмотка ведется внахлест. См. рис.6
Рисунок 6. Обмотка катушки липкой лентой
Обмотка катушки липкой лентой
Аналогичным образом поверх слоя из липкой ленты наносится слой из алюминиевой фольги, служащий экраном обмотки датчика. Для этого фольга нарезается на полосы шириной около 10 мм. Для предотвращения образования короткозамкнутого витка, снижающего добротность контура, обмотка из фольги должна занимать не всю поверхность кольца обмотки датчика – от фольги оставляется свободным небольшой участок длиной 10-20 мм. Отвод от экрана выполняется луженым одножильным проводом, который закрепляют узлом поверх экрана. В завершение, кольцо обмотки датчика обматывают еще одним слоем липкой ленты по все поверхности, выпустив наружу выводы обмотки и экрана. К этим выводам подпаивается экранированный кабель, который соединяет катушку с металлоискателем. Жесткость катушке можно придать различными способами. Один из них – подобрать подходящий корпус, например, взять крышку от набора пластиковой посуды, поместить в него катушку и залить эпоксидной смолой. Предварительно необходимо проделать в корпусе отверстие и продеть в него кабель.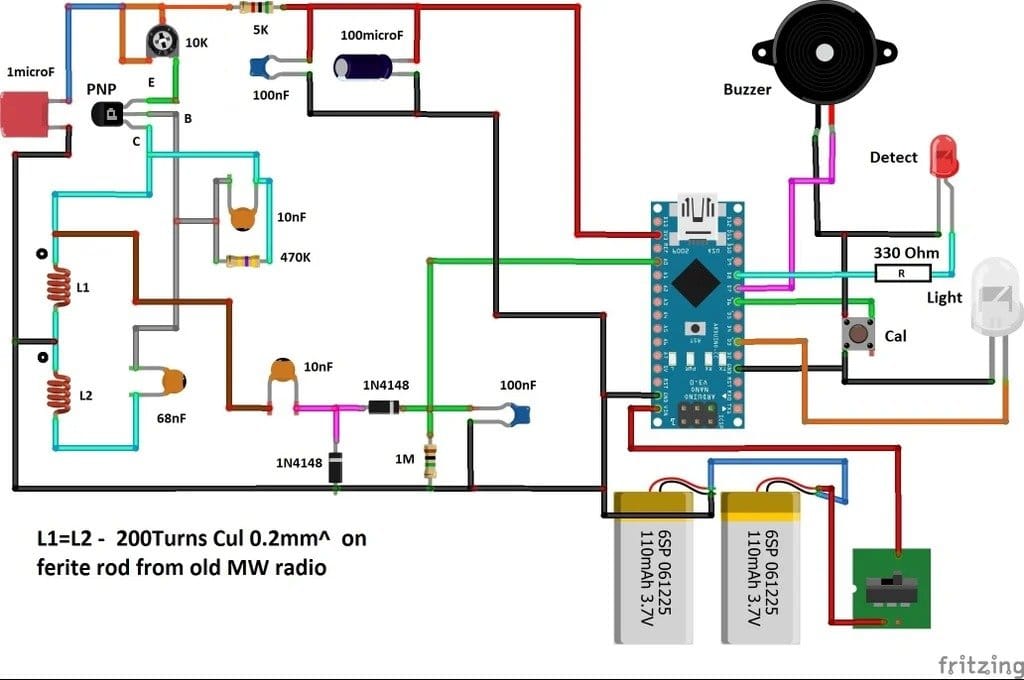 Также на корпусе катушки необходимо предусмотреть крепление для штанги.
Также на корпусе катушки необходимо предусмотреть крепление для штанги.
Вид печатной платы, расположение элементов на печатной плате и рисунок печатной платы (М1:1) приведены на рис.7, 8 и 9.
Настройка прибора
Можно предложить следующий порядок настройки прибора.
Проверить правильность монтажа схемы и подать питание.
Измерить потребляемый ток. Он должен быть не более 15 мА.
Убедиться, что на выводе 3 микросхемы D1 присутствует меандр расчетной частоты (около 20 кГц для указанных выше номиналов конденсаторов C1 и C2 и стандартного датчика)
Удалить рамку прибора подальше от металлических предметов и нажать кнопку S0 «Сброс».
Убедиться в работоспособности органов индикации, поднося к датчику различные металлические предметы.
Работа с прибором
Если переключатель S1 замкнут, то прибор переходит в статический режим. В этом режиме при приближении катушки к ферромагнитной мишени начинают последовательно загораться светодиоды VD3, VD2, VD1. Если катушку приближать к неферромагнитному металлическому объекту, то будут последовательно загораться светодиоды VD5, VD6, VD7. К сожалению таким же образом прибор реагирует на железные предметы с большой площадью поверхности (например, консервная банка). Это связано с тем, что при воздействии на поисковую катушку в металлических ферромагнитных объектах возникает сразу два эффекта – эффект проводимости и ферромагнитный эффект. При некотором соотношении площади поверхности объекта к объему начинает преобладать эффект проводимости.
Если катушку приближать к неферромагнитному металлическому объекту, то будут последовательно загораться светодиоды VD5, VD6, VD7. К сожалению таким же образом прибор реагирует на железные предметы с большой площадью поверхности (например, консервная банка). Это связано с тем, что при воздействии на поисковую катушку в металлических ферромагнитных объектах возникает сразу два эффекта – эффект проводимости и ферромагнитный эффект. При некотором соотношении площади поверхности объекта к объему начинает преобладать эффект проводимости.
При размыкании переключателя S1 прибор переходит в динамический режим. В этом режиме катушка должна перемещаться над грунтом со скоростью примерно 0.5-1 м/с. Местонахождение объекта в динамическом режиме находится методом “артиллерийской вилки” при проведении катушки над объектом дважды – слева направо и справа налево. В этом режиме важно почувствовать наименьшую скорость, с которой можно перемещать катушку. Это легко осваивается при недолгой тренировке.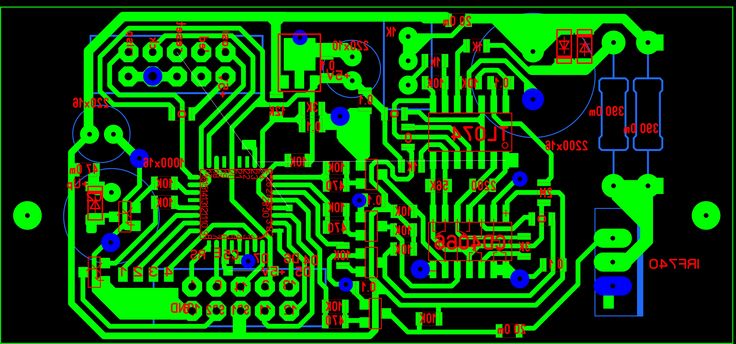 Индикация в динамическом режиме выглядит немного иначе. При передвижении катушки над ферромагнитным объектом сначала загораются светодиоды из “шкалы” VD5, VD6, VD7, а затем из “шкалы” VD3, VD2, VD1. При передвижении катушки над неферромагнитным объектом индикация работает наоборот.
Индикация в динамическом режиме выглядит немного иначе. При передвижении катушки над ферромагнитным объектом сначала загораются светодиоды из “шкалы” VD5, VD6, VD7, а затем из “шкалы” VD3, VD2, VD1. При передвижении катушки над неферромагнитным объектом индикация работает наоборот.
Как уже было указано выше, каждому светодиоду соответствует свой тон звуковой индикации. После непродолжительной работы с металлоискателем запоминаются “напевы”, характерные для разных типов мишеней. Это позволяет при поисках пользоваться преимущественно звуковой индикацией, что довольно удобно.
Перед началом работы в обоих режимах необходимо выставить оптимальную чувствительность прибора с помощью переменного резистора R6. Он выставляется в такое положение, когда прибор начинает индицировать ложные отклики. Затем медленно вращая ротор этого резистора, необходимо добиться исчезновения этих ложных срабатываний.
При прочих равных условиях динамический режим за счет фильтрации позволяет достичь лучшей чувствительности по сравнению со статическим режимом. Однако статический режим также бывает иногда необходим. Например, необходимо проверить дно узкой ямы. В этом случае нет возможности осуществлять горизонтальные качания поисковой катушки, которые необходимы для динамического режима. Здесь выручит статический режим.
Однако статический режим также бывает иногда необходим. Например, необходимо проверить дно узкой ямы. В этом случае нет возможности осуществлять горизонтальные качания поисковой катушки, которые необходимы для динамического режима. Здесь выручит статический режим.
Во время полевых испытаний металлоискатель показал неплохие результаты.
| Архив для статьи “Металлоискатель на микроконтроллере AVR” | |
| Описание: Файл прошивки микроконтроллера | |
| Размер файла: 1.52 KB Количество загрузок: 3 543 | Скачать |
Понравилась статья? Поделиться с друзьями:
DIY Очень простой металлоискатель Arduino
Он обязательно сработает для вас сразу после изготовления
Детали
На этот раз я покажу вам, как собрать очень простой металлоискатель.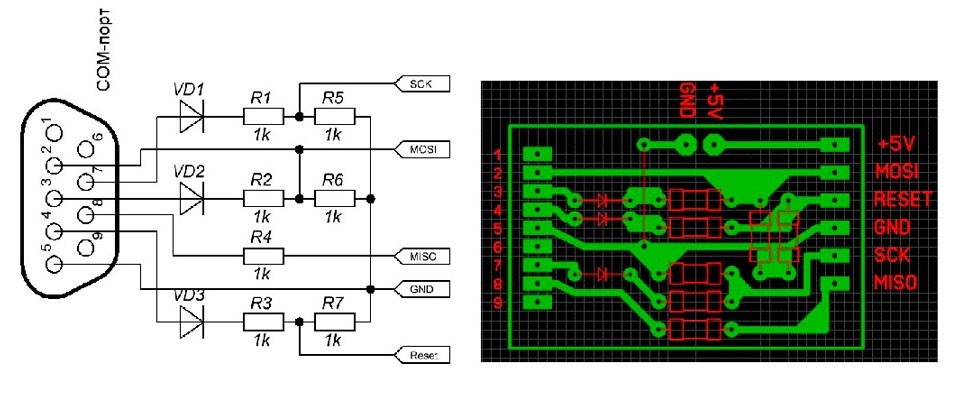 Несмотря на свою простоту, он обладает относительно хорошей чувствительностью и отличной стабильностью в работе, благодаря чему нет необходимости в какой-либо калибровке даже при длительной работе. Так же размеры и индуктивность детекторной катушки не критичны, а главное она у вас обязательно заработает сразу после изготовления. Это делает его идеальным металлоискателем для начинающих.
Несмотря на свою простоту, он обладает относительно хорошей чувствительностью и отличной стабильностью в работе, благодаря чему нет необходимости в какой-либо калибровке даже при длительной работе. Так же размеры и индуктивность детекторной катушки не критичны, а главное она у вас обязательно заработает сразу после изготовления. Это делает его идеальным металлоискателем для начинающих.
В принципе, проект был взят из блога Silicon Junction, а я просто добавил звуковую индикацию для лучшего контроля во время металлодетекции. Обнаруживающая часть представляет собой простой генератор Колпитца с резонансным контуром, состоящим из C2, C3 и SEARCH_COIL. Этот осциллятор будет иметь частоту приблизительно 260 кГц.
Полное устройство состоит из нескольких компонентов:
– микроконтроллер Arduino Nano
– BC337 или аналогичный NPN-транзистор
. C5 и R4 обеспечивают связь выхода генератора с землей.
C5 и R4 обеспечивают связь выхода генератора с землей.
Любая катушка с индуктивностью около 200-400 мкГн должна работать, и вы должны стараться поддерживать достаточно низкое сопротивление. Это даст вам частоту около 200-400 кГц, что находится в пределах диапазона, с которым может работать Arduino. Я использовал катушку диаметром 20 см и содержит 25 витков, но детектор вполне корректно работал и с двумя концентрически расположенными катушками диаметром 12 и 23 см, каждая из которых имела по 25 витков и соединена последовательно.
Код Arduino подсчитывает каждые 100 миллисекунд, сколько произошло импульсов, и сохраняет это значение в качестве базового уровня. В основном цикле подсчитайте, сколько импульсов произошло за 100 миллисекунд, сохраните это как количество. Если значение счетчика изменилось по сравнению с базовым значением, включается светодиод и активируется зуммер. Это означает, что детектор непрерывно калибруется каждые 100 миллисекунд. Код относительно прост благодаря библиотеке FreqCount, которую вы также можете скачать по указанным ссылкам.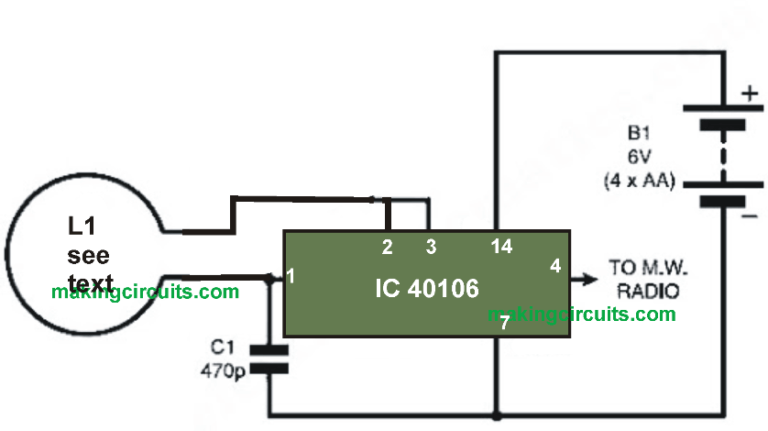
Преимущество этого типа кода заключается в том, что для работы устройства не требуется никаких регулировок или калибровки, а недостатком является то, что для обнаружения металлического объекта необходимо движение объекта относительно на катушку или наоборот.
- 1 × Ардуино Нано R3
- 1 × Транзистор общего назначения NPN
- 3 × Светодиод (общий)
- 1 × Зуммер
- 1 × Одиночный стабилитрон, 4,3 В
Посмотреть все 8 компонентов
Нравится этот проект?
ДелитьсяКомплект металлоискателя 3–5 В пост.
 тока, 60 мм
тока, 60 ммПродано
Добавьте свой отзыв
65.00 EGP
Список желаний
Присоединитесь к списку ожидания, чтобы получить уведомление по электронной почте, когда этот продукт станет доступен
Введите свой адрес электронной почты, чтобы присоединиться к списку ожидания для этого продукта :9074813106878
Категории:Датчики
Метки:модули, датчики
- Описание
- Отзывы (0)
Описание:
Детали для металлоискателя своими руками. Вам нужно припаять его самостоятельно.
Component list:
NO.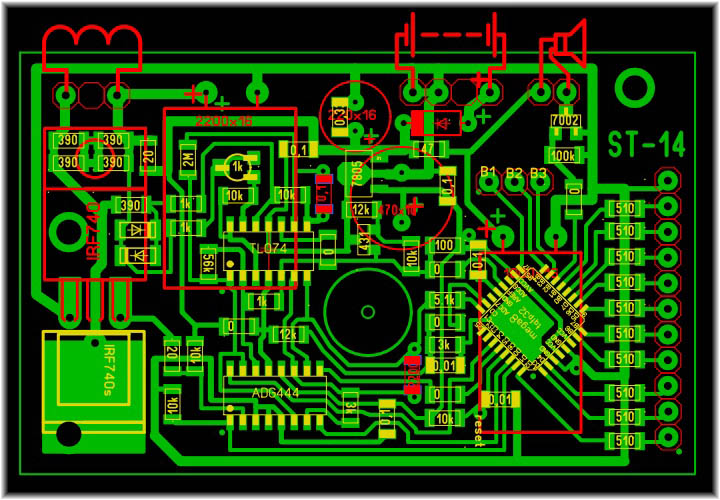 | PCB Marker | Component Name | Parameter | QTY | |||
| 1 | R3 | RES | 470R | 1 | |||
| 2 | R2 | RES | 2K | 1 | |||
| 3 | R1 | RES | 200K | 1 | |||
| 4 | VR1 | Adj-Res | 100R | 1 | |||
| 5 | C2.C3 | CAP | 222P | 2 | |||
| 2 | |||||||
| C1.9008 | C1.9008 | C1.9008 | |||||
| C1. | 4 | .0098 | 104P | 2 | |||
| 7 | C5 | E-CAP | 100UF | 1 | |||
| 8 | LED1 | LED | 5mm Red | 1 | |||
| 9 | Q2.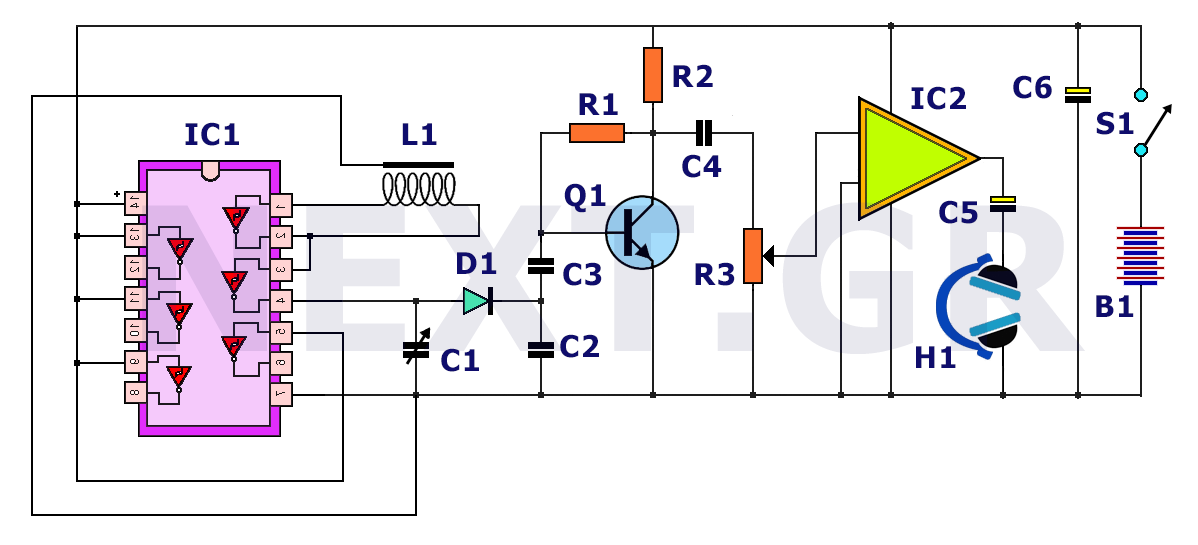 |