Многоприводные ленточные конвейеры: Расчет ленточного конвейера / Статьи / О компании
alexxlab | 29.03.2023 | 0 | Разное
Приводные станции ленточных конвейеров от производителя
05.02.2017
Приводящий в движение транспортёрную ленту и тяговый элемент механизм в конструкции современного ленточного конвейера является одним из основных. Кстати, если тяговый элемент в конструкции конвейер отсутствует, то приводной механизм взаимодействует непосредственно с рабочими элементами устройства.
Следует заметить, что современные ленточные конвейеры могут иметь только один привод, а могут располагать несколькими, по количеству приводов транспортёры делятся на одно- и многоприводные, дополнительные приводные станции ленточных конвейеров называются промежуточными, очень часто каждый из них снабжён собственным электрическим мотором. Многоприводные конвейеры чаще имеют внушительную длину, а несколько приводов позволяют контролировать уровень натяжения конвейерной линии и поддерживать заданную скорость её движения.
Сам же привод, устанавливаемый на ленточном конвейере может быть:
- мотор-редуктором;
- мотор-барабаном.


Линии ленточных конвейеров, эксплуатируемые на приводных станциях, как правило, оснащаются и мотор-редуктором, и мотор-барабаном, что повышает их практичность и исключает зависимость только от одного приводного механизма. Оба приводные механизма обязательно должны иметь идентичные технические и эксплуатационные параметры, и устанавливаются симметрично. Если конвейер с приводной станцией имеет небольшой наклон транспортёрной ленты, то и мотор-редуктор, и мотор-барабан должен оснащаться тормозом и фиксатором обратного хода. Качественные приводные станции ленточных конвейеров купить можно у надёжного производителя, главное, выбрать вариант точно под свои задачи и условия эксплуатации. Не забываем и о запасе деталей и узлов, быстро изнашивающихся.
Мотор-барабан считается наиболее подходящим приводом для ленточного конвейерного оборудования. Следует уточнить, что конструкция мотор-барабана скрыта в герметичном корпусе, и состоит она из подшипников и уплотнителей, из редуктора и двигателя. Благодаря герметичному корпусы все важные и подвижные детали мотор-барабана надёжно защищены от попадания грязи, пыли, влаги и так далее. Небольшой вес мотор-барабана позволяет снизить нагрузку на несущую раму конвейера, более того, имеющаяся масса данного приводного механизма распределяется равномерно.
Благодаря герметичному корпусы все важные и подвижные детали мотор-барабана надёжно защищены от попадания грязи, пыли, влаги и так далее. Небольшой вес мотор-барабана позволяет снизить нагрузку на несущую раму конвейера, более того, имеющаяся масса данного приводного механизма распределяется равномерно.
Среди основных преимуществ мотор-барабана следует назвать:
- Высокий уровень безопасности при эксплуатации;
- Экономичность в использовании, простое обслуживание, лёгкий монтаж;
- Значительно высокий КПД по сравнению со всеми остальными приводными механизмами;
- Герметичность корпуса устройства позволяет значительно продлевать срок надлежащей работы механизма;
- Встроенная защита в каждую фазу не допускает нагрев и прерывание электрической цепи;
- Низкий уровень шума, производимого работающим приводным устройством;
- Возможность проведения процедуры футеровки поверхности мотор-барабана.
МОДЕЛИРОВАНИЕ СТАЦИОНАРНЫХ РЕЖИМОВ РАБОТЫ МНОГОБЛОЧНЫХ ПРИВОДОВ ЛЕНТОЧНЫХ КОНВЕЙЕРОВ
Авторы:
Реутов Александр Алексеевич
Дата поступления:
03. 04.2019
04.2019
Библиографическое описание статьи:
Реутов А. А. моделирование стационарных режимов работы многоблочных приводов ленточных конвейеров // Современные технологии. Системный анализ. Моделирование. – 2019. – Т. 62, № 2. – С. 40–47. – DOI: 10.26731/1813-9108.2019.2(62).40–47
Рубрика:
Машиностроение и машиноведение
Номер журнала (Том):
№2(62)
УДК:
621.34
DOI:
10.26731/1813-9108.2019.2(62).40–47
Файл статьи:
Страницы:
Аннотация:
В статье представлена разработанная компьютерная многомассовая динамическая модель движения ленты на приводных барабанах конвейера, позволяющая анализировать стационарные режимы работы приводов с унифицированными и неунифицированными приводными блоками, определять тяговые усилия и реализуемую мощность приводных блоков, оценивать скольжение и износ ленты на барабанах с учетом механических характеристик электродвигателя, ленты и контактного взаимодействия. Описана методика анализа движения ленты и работы привода, включающая оценку износа ленты и поверхности приводных барабанов через мощность силы трения скольжения дискретных тел ленты по поверхности приводных барабанов.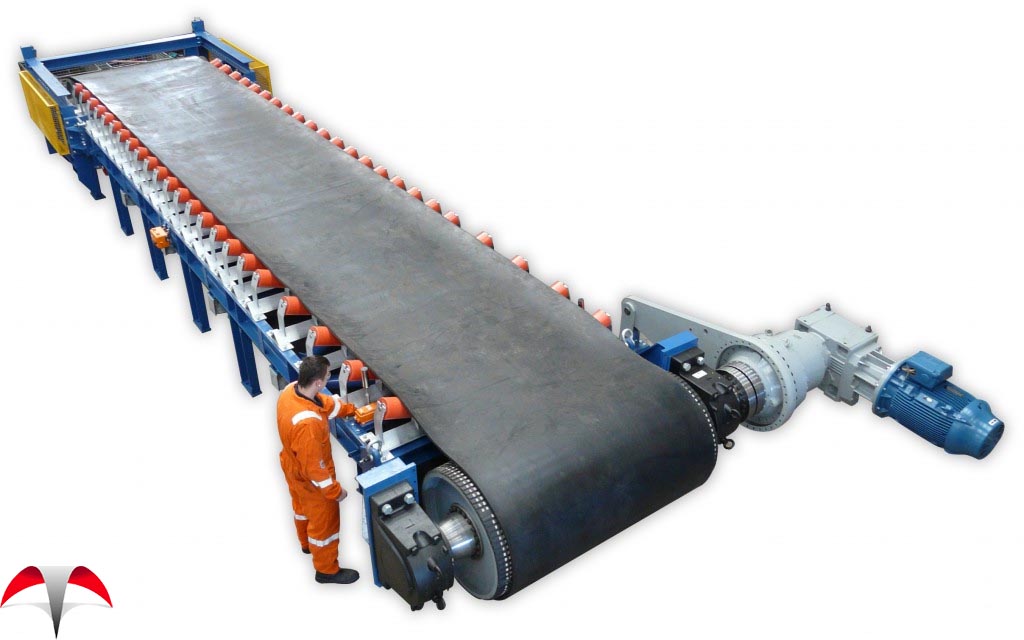
 Уменьшение синхронной угловой скорости асинхронного электродвигателя последнего приводного блока снижает скорость скольжения и износ ленты на приводных барабанах.
Уменьшение синхронной угловой скорости асинхронного электродвигателя последнего приводного блока снижает скорость скольжения и износ ленты на приводных барабанах.
Ключевые слова:
ленточный конвейер
приводной барабан
фрикционный привод
контакт ленты с барабаном
мощность силы трения скольжения
компьютерная модель.
Список цитируемой литературы:
- Дьячков В.К. Многоприводные ленточные конвейеры большой протяженности // Сб. научных трудов. Вып. 2. № 11. М. : ВНИИПТМАШ. 1974. 33 с.
- Келлер К., Фаттер Х., Виденрот Я. Проектирование и ввод в эксплуатацию протяженной конвейерной установки для соединительной выработки 4010 // Глюкауф. 2006. № 1(2). С. 17–29.
- Helten S., Miketta A. Design, engineering and manufacturing of heavy-duty conveyor-belt pulleys [Auslegung, Konstruktion und Fertigung hochbeanspruchter Fdrdergurttrommeln] // World of Mining – Surface and Underground. 2018. № 70 (2). P. 114–119.
- Шахмейстер Л.
 Г., Солод Г.И. Подземные конвейерные установки. М. : Недра, 1976. 432 с.
Г., Солод Г.И. Подземные конвейерные установки. М. : Недра, 1976. 432 с. - Дьяков В.А., Шахмейстер Л.Г., Дмитриев В.Г. Ленточные конвейеры в горной промышленности. М. : Недра, 1982. С. 162–178.
- Реутов А.А. Особенности применения дополнительных лент в приводах ленточных конвейеров // Изв. Урал. гос. горн. ун-та. 2014. № 1. С. 44–47.
- Реутов А.А. Моделирование стационарных режимов работы приводов ленточных конвейеров // Тяжелое машиностроение. 2007. № 2. С. 34–36.
- Nuttall A.J.G., Lodewijks G. Dynamics of multiple drive belt conveyor systems // Particle and Particle Systems Characterization. 2007. 24 (4-5). Р. 365–369.
- Xiao D., Xia R., Li X., He K., Wu W. Simulation and experiment research of double-motor drive and control system for pipe belt conveyor based on master-slave control method // Frontiers in Artificial Intelligence and Applications. 2017. Vol. 299. Р. 378–388.
- Zheng M.-Q., Hou Y.-B., Song C.-F.
 , Wang L., Xue, F. Equalization control with multistage fuzzy in coal belt conveyor by dual-motor drive // Meitan Xuebao/Journal of the China Coal Society. 2015. Vol. 40. Р. 546–552.
, Wang L., Xue, F. Equalization control with multistage fuzzy in coal belt conveyor by dual-motor drive // Meitan Xuebao/Journal of the China Coal Society. 2015. Vol. 40. Р. 546–552. - Биличенко Н.Я., Высочин Е.М., Завгородний Е.Х. Эксплуатационные режимы ленточных конвейеров. Киев : ГИТЛ, 1964. C. 46–47.
- Программа ввода данных. Руководство пользователя. URL: http://www.universalmechanism.com/download/80/rus/ 03_um_data_input_program.pdf (Дата обращения 22.04.2019).
- Захаров А.Ю., Ширямов Д.А. Определение критической величины сопротивления вращению конвейерных роликов // Горное оборудование и электромеханика. 2016. № 1. С. 3–8.
- Реутов А.А. Моделирование буксования привода ленточного конвейера // Горное оборудование и электромеханика. 2008. № 12. С. 40–43.
- Андреев А.В. Передача трением. М. : Машиностроение, 1978. С. 83.
Slim-Fit Низкопрофильный конвейер | Небольшие передаточные конвейеры без инструментов
Тонкий низкопрофильный конвейер | Небольшие передаточные конвейеры без инструментовПоиск
КОНВЕЙЕРЫ Многоцелевые
Низкопрофильные конвейеры Slim-Fit
Быстро становятся отраслевым стандартом.
Гигиенический, моющийся, безинструментальный конвейер для транспортировки мелких продуктов
Качество и доступность
Потребность в качественной, но в то же время доступной, предварительно спроектированной, гигиеничной системе промывки была движущей силой при разработке Slim-Fit by Multi-Conveyor. Подход без использования инструментов и вытягивания штифтов позволяет оператору снимать ремень за считанные секунды для планового технического обслуживания. Изготовленная из 100 % нержавеющей стали, эта низкопрофильная рама стандартно поставляется с 3-слойным ремнем синего цвета. Скоро станет отраслевым стандартом. Загрузите новый файл Slim-Fit в формате .pdf прямо сейчас!
Сравните Slim-Fit с аналогичными низкопрофильными конвейерами, представленными сегодня на рынке. Мы верим, что вы будете приятно удивлены. *Стандартная ширина ремня 6 дюймов или 12 дюймов. Стандартные длины от 2 до 10 футов. Чем Slim-Fit отличается от аналогичных продуктов на рынке?
Посчитайте.

* Индивидуальные решения или размеры потребуют немного больше времени на выполнение.
Получите дополнительную информацию о конвейере Slim-Fit™
Позвоните по телефону 1-800-236-7960 или свяжитесь с нами через Интернет
Видео
Литература
О нас/Статьи
Полная брошюра о возможностях (в двух словах)
Почему стоит выбрать Multi-Conveyor?
Узнайте, как мы являемся вашей компанией с полным спектром услуг
Специальные решения для транспортировки сыра и молочных продуктов
Конвейеры для пищевых продуктов: ваша линия упаковки (PFW)
Закупки конвейеров: комплексная проверка (PTT)
Эволюция конвейеров в пищевой промышленности : Valley Popcorn
По продукту
Решения для накопления — все типы
Конвейеры с технологией ARB™
Элементы управления, электроника, сервосистемы
Пластиковый модульный ремень с матовым верхом
Mat Top Новая технология Radius Belt Curve
Поворотные столы: накопление или разборка
Пластиковая столешница в виде цепного стола
Низкопрофильные санитарные конвейеры Slim-Fit
Success Line “Quick Ship” (обзор)
Success Line “Quick Ship” Полный каталог
НОВИНКА ! Справочная таблица накопления
По отраслям
Фармацевтические конвейеры и ремни
Санитарные и пищевые системы
Преобразование бумаги
Упаковочные устройства – обработка материалов
Упаковочное оборудование – обработка материалов
Другое
Запасные части
Варианты опор и ножек
Направляющие
Справочник по электрическим компонентам
Перейти к просмотру видео
Конвейерные ленточные системы с матовым верхом
(Загрузите или просмотрите нашу новейшую литературу по матовому верху прямо сейчас)
Модульные пластиковые ленточные системы, также называемые матовым или плоским верхом, ориентированы на ваши конкретные технологические потребности. Мы выбираем правильные компоненты, от стальных до резиновых захватов, от цепей и звездочек до элементов управления и конфигурации. Например, трехъярусная ленточная система была подходящим модульным решением для процесса сушки закусок.
Мы выбираем правильные компоненты, от стальных до резиновых захватов, от цепей и звездочек до элементов управления и конфигурации. Например, трехъярусная ленточная система была подходящим модульным решением для процесса сушки закусок.
Команда Multi-Conveyor работает напрямую с вами, чтобы убедиться, что указанный нами ремень соответствует требованиям вашего проекта или превосходит их. Конструкция из нержавеющей стали с сервоприводом для высокоскоростной индексации является одной из наших специализаций. Вы также можете рассчитывать на контрольную проверку на своем предприятии для точной настройки наших систем индексации.
Часто мы используем очень прочную конструкцию для обеспечения устойчивости при определенных условиях потока продуктов, таких как бумажные рулоны. Горизонтальная транспортировка поворотных частей с несколькими конфигурациями дорожек отвечала еще одному недавнему требованию рынка.
Модульная пластиковая лента — конвейер с матовым покрытием Особенности:
- Конструкция из углеродистой или нержавеющей стали
- Прямолинейные и боковые изгибы
- Горизонтальное, наклонное или наклонное
- Доступная ширина цепи: от 3 до 120 дюймов
- Регулируемые или фиксированные направляющие
- Сквозные переходы с роликовыми или плоскими направляющими из нержавеющей стали
- Боковая передача с креплением заподлицо и подшипниками
Системы типа желоба
На изображении справа показана система типа желоба снизу, чтобы получить представление о том, как пластиковый ремень движется через систему в форме желоба. Лотковая конструкция состоит из основного хребта конвейера с боковыми веретенообразными лентопротяжными опорами меньшего диаметра, которые могут быть выполнены из роликов или стационарных опор. Основываясь на раме, лента естественным образом образует желоб (форма «U»), чтобы помочь контролировать сам продукт.
Лотковая конструкция состоит из основного хребта конвейера с боковыми веретенообразными лентопротяжными опорами меньшего диаметра, которые могут быть выполнены из роликов или стационарных опор. Основываясь на раме, лента естественным образом образует желоб (форма «U»), чтобы помочь контролировать сам продукт.
Zero Tangent
Новое в наших решениях для транспортировки пластиковых лент, теперь предлагаются варианты изогнутых лент, созданных с использованием новой технологии Zero Tangent™ Radius Belt Curve (от Intralox®) . Модульная конструкция ремня отличается повышенной надежностью и производительностью, способной выдерживать узкие передачи и кривые различного радиуса.
Преимущества технологии кривой ленты с нулевым радиусом касания:
- Экономия площади: Это особенно важно при ширине ленты 24″, 32″ и 40″.
- Сохраняйте ориентацию продукта : На всех типичных модульных пластиковых лентах внутренний край ленты сжимается на входе в изгиб, а затем снова расширяется на выходе из изгиба.
