Модель станок: Виртуальные модели станков – ООО “Центр СПРУТ-Т”
alexxlab | 11.05.2023 | 0 | Разное
Виртуальные модели станков – ООО “Центр СПРУТ-Т”
Виртуальные модели станков
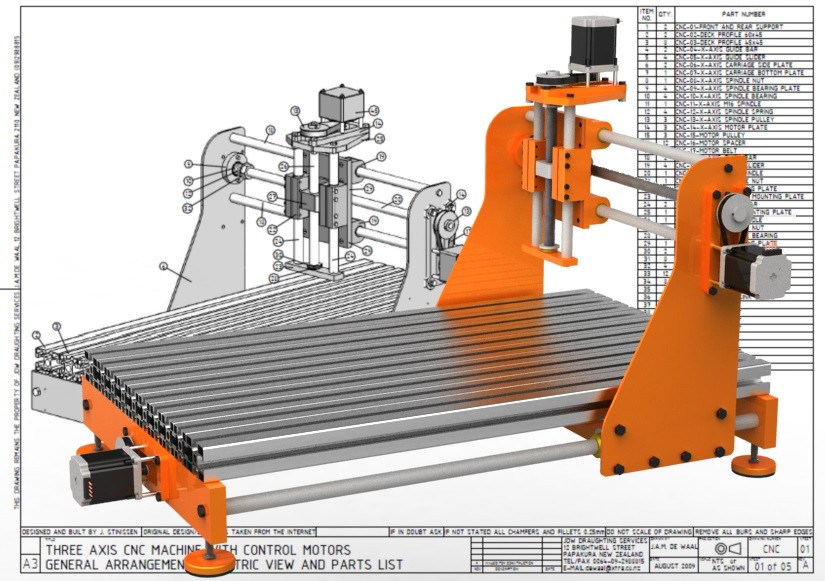
фрезерная обработка
- Обрабатывающий центр Willemin-Macodel 508 MT
- Создание виртуальной модели станка с кинематической схемой
- Создание реалистичных 3D моделей инструмента
- Задание конфигурации станка
Токарная обработка
- Многофункциональный токарно-фрезерный центр Nakamura
- Виртуальная наладка револьвера
- Реализация синхронной обработки
Многокоординатная фрезерная обработка
- Обрабатывающий центр Mikron VCE600
- Сквозной процесс от создания виртуального станка до готовой детали
При современных компоновках станков большое количество рабочих узлов, движущихся одновременно, создают опасность соударений внутри станка.
 Для того чтобы избежать этого нужны виртуальные станки в CAM-системе. Виртуальный станок представляет собой набор трехмерных моделей всех рабочих органов реального станка и позволяет обеспечить полную идентичность процесса обработки в SprutCAM с процессом обработки на реальном оборудовании. При использовании виртуального станка в SprutCAM
Для того чтобы избежать этого нужны виртуальные станки в CAM-системе. Виртуальный станок представляет собой набор трехмерных моделей всех рабочих органов реального станка и позволяет обеспечить полную идентичность процесса обработки в SprutCAM с процессом обработки на реальном оборудовании. При использовании виртуального станка в SprutCAM- защита дорогостоящего оборудования и инструмента от столкновений
- защита деталей от зарезов и повреждений
Создание виртуальной модели станка с кинематической схемой
Создание 3D модели станка в CAD-системе3D геометрия станка может быть создана в любой CAD-системе
Импорт в SprutCAM напрямую из CAD-системы
Импорт в SprutCAM через промежуточный формат (IGES, STEP, STL и др.
 )
)После импорта в SprutCAM, 3D геометрия сохраняется во внутреннем osd формате
Посмотрите видео, демонстрирующее подготовку 3D модели для использования в SprutCAM
Характер движения рабочих органов
Задание условий и ограничений
Все параметры сохраняются в специальном xml файле
Загружайте 3D модели инструмента от производителя или созданные Вами
Импорт в SprutCAM напрямую из CAD-системы или в промежуточном формате (IGES, STEP, STL и др.)
Используйте и редактируйте параметрические 3D модели из встроенной библиотеки инструментов SprutCAM
Обрабатывающий центр Willemin-Macodel 508 MT
Система ЧПУ: Fanuc 31i-A5
8 управляемых осей
Токарно-фрезерный шпиндель с поворотной осью
Трехпозиционный револьвер
Виртуальная модель станка Mikron с поворотным столом
Обрабатывающий центр Mikron VCE600
Поворотный стол LEHMANN Т1-507510
5 управляемых осей (3+2)
Система ЧПУ: Heidenhain iTNC530
Система ЧПУ стола: Fanuc 35iB
Более подробно о данном виртуальном станке смотрите в разделе: Примеры внедрения SprutCAM
Сквозной процесс от создания виртуальной модели станка до готовой детали
Пример создания виртуальной модели многофункционального токарно-фрезерного центра Nakamura
Обрабатывающий центр Nakamura Super NTJ
9 управляемых осей
Количество одновременно управляемых осей (4+4)
Два шпинделя и две револьверных головки
Система ЧПУ: Fanuc 18i-TB
Допустимый диапазон вращения оси B1: -91º…+91º
При работе на главном шпинделе B1<=0, на противошпинделе B1>=0
Разделение операций по каналам: первый канал — операции верхнего револьвера, второй канал — нижнего револьвера
При наладке выбор из 6 типов блоков для верхнего револьвера и 12 типов блоков для нижнего
Разработаны операции простого перехвата и перехвата с отрезкой, в соответствии с документацией станка
При использовании виртуального станка в
SprutCAM траектория движения инструмента и рабочих органов формируется уже с учетом избегания всех возможных коллизий. При этом осуществляется синхронизация движения рабочих органов и недопущение конфликтов в рабочей зоне, и как следствие — обеспечение оптимальной и безаварийной работы станка.
При этом осуществляется синхронизация движения рабочих органов и недопущение конфликтов в рабочей зоне, и как следствие — обеспечение оптимальной и безаварийной работы станка.Все это обеспечивается с помощью:
— моделирования синхронизации до 4-х инструментальных узлов одновременно;
— покадровой синхронизации при многоканальной обработке;
— автоматического формирования бесконфликтной синхронной работы;
— идентичности процесса моделирования с реальным процессом обработки.
Реальная виртуальность в SprutCAM – надежная работа на производстве
Примеры выполненных виртуальных схем станков
3-х осевые фрезерные
4-х осевые фрезерные
5-и осевые фрезерные AC
5-и осевые фрезерные BC
6-и осевые
8-ми осевые
Токарные
Токарно-фрезерные
Токарные автоматы
Электроэрозионные
Шлифовальные
Роботы
Токарный станок с ЧПУ модели STR-30
Каталог » Токарные станки » Токарные станки с ЧПУ » Токарный станок с ЧПУ модели STR-30
|
|
Станок токарный с ЧПУ модели STR-30 (аналог станка 160HT) предназначен для высокопроизводительной токарной обработки деталей типа «фланец», «втулка», «ниппель», «штуцер» и т.
КОНСТРУКТИВНЫЕ ОСОБЕННОСТИ
Компоновка станка выполнена с целью получения максимальной жесткости, что достигается установкой на станине шпиндельной бабки и подвижного наклонного суппорта с углом наклона 45o для крепления револьверной головки осевого типа фирмы «Pragati» (Индия), опционально возможна установка револьверных головок (в том числе и с приводным инструментом) производства “DUPLOMATIC” (Италия) и “SAUTER” (Германия). Станина, шпиндельная бабка и суппорт представляют собой литые детали, обеспечивающие достаточную жёсткость и термостабильность.
Применяемые на станке электроприводы обеспечивают бесступенчатое регулирование величин рабочих подач и частот вращения шпинделя в широком диапазоне, что дает возможность использования высокопроизводительного режущего инструмента для обработки деталей на станке.
 Гидравлический привод зажима патрона реализован на устройствах фирмы «KITAGAWA».
Гидравлический привод зажима патрона реализован на устройствах фирмы «KITAGAWA».Станок в базовом варианте имеет следующие управляемые оси:
Ось Х – поперечное перемещение суппорта
Ось Z – продольное перемещение суппорта
Система смазки станка – централизованная от станции импульсной смазки.
Технические характеристики станка модели STR-30
Рабочая зона |
|
|
Над станиной, мм |
550 |
|
Максимальный диаметр обработки, мм |
350 (460) |
|
Максимальная длина обработки, мм |
310 |
|
Размер патрона, мм |
210 (250) |
|
Главный шпиндель |
|
|
Отверстие в шпинделе, мм |
62 (85) |
|
Конус шпинделя |
A2-6” (A2-8”) |
|
Мощность шпинделя (S1/S6-30 мин), кВт |
9/11 (12/16) |
|
Диапазон частот вращения шпинделя, об/мин. |
45-4500 (3000) |
|
Перемещение |
|
|
Ось Х, мм |
260 |
|
Ось Z, мм |
320 |
|
Скорость подачи |
|
|
Диапазон программируемых рабочих подач по осям X/ Z, мм/мин |
1…10 000 / 1…10 000 |
|
Быстрый ход по осям X/ Z, м/мин |
30/30 |
|
Револьверная головка |
|
|
Модель |
BTP-100 (TBMA 160) |
|
Количество позиций, шт |
8 (12) |
|
Размер резца, мм |
32×32 (25х25) |
|
Макс. |
40 (32) |
|
Точность |
|
|
Точность позиционирования, мм |
0,01 |
|
Повторяемость позиционирования, мм |
±0,005 |
|
Прочие характеристики |
|
|
Габариты (LxBxH), мм |
1600x1800x1900 |
|
Масса, кг |
3500 |

 диаметр установки инструмента круглого сечения, мм
диаметр установки инструмента круглого сечения, ммПримечание: характеристики, указанные в скобках, являются опциональными
ОПЦИИ по согласованию с «Покупателем»
№ п/п |
Наименование |
|
1. |
Шпиндель с конусом А2-8” и патроном диам. 250 мм (мощность шпинделя 12/16 кВт, макс. частота вращения 2000 об/мин) |
|
2. |
Cистема привязки инструмента: токарная рука HPRA |
|
3. |
8-ми позиционная инструментальная головка ф. «Sauter» взамен BTP-100 фирмы «Pragati» |
|
4. |
12-ти позиционная инструментальная головка взамен 8-ми позиционной головки фирмы «Pragati» |
|
5. |
Транспортер стружкоуборочный с баком сбора стружки |
|
6. |
Пакет для токарно-фрезерной обработки. |

 включая:
включая:| План фундамента станка STR-30 |
Что такое модель машинного обучения?
Редактировать
Твиттер LinkedIn Фейсбук Электронная почта
- Статья
- 2 минуты на чтение
Модель машинного обучения — это файл, обученный распознавать определенные типы шаблонов. Вы обучаете модель на наборе данных, предоставляя ей алгоритм, который она может использовать для рассуждений и извлечения уроков из этих данных.
После того, как вы обучили модель, вы можете использовать ее для анализа данных, которых она раньше не видела, и делать прогнозы относительно этих данных. Например, допустим, вы хотите создать приложение, которое может распознавать эмоции пользователя на основе его выражения лица. Вы можете обучить модель, предоставив ей изображения лиц, каждое из которых помечено определенной эмоцией, а затем вы можете использовать эту модель в приложении, которое может распознавать любую эмоцию пользователя. Пример такого приложения см. в образце Emoji8.
Когда использовать машинное обучение
Хорошие сценарии машинного обучения часто обладают следующими общими свойствами:
- Они включают в себя повторяющиеся решения или оценки, которые вы хотите автоматизировать и которым нужны согласованные результаты.

- Трудно или невозможно явно описать решение или критерии, лежащие в основе решения.
- У вас есть размеченные данные или существующие примеры, где вы можете описать ситуацию и сопоставить ее с правильным результатом.
Машинное обучение Windows использует для своих моделей формат Open Neural Network Exchange (ONNX). Вы можете загрузить предварительно обученную модель или обучить свою собственную модель. Дополнительные сведения см. в разделе Получение моделей ONNX для Windows ML.
Начало работы
Вы можете начать работу с машинным обучением Windows, следуя одному из наших полных руководств по приложениям или сразу перейдя к примерам машинного обучения Windows.
Примечание
Используйте следующие ресурсы для получения справки по Windows ML:
- Чтобы задать или ответить на технические вопросы о Windows ML, используйте тег windows-machine-learning в Stack Overflow.
- Чтобы сообщить об ошибке, отправьте сообщение о проблеме на нашем GitHub.
Обратная связь
Просмотреть все отзывы о странице
Что такое модели машинного обучения?
Что такое модель машинного обучения?
Модель машинного обучения — это программа, которая может находить закономерности или принимать решения на основе ранее неизвестного набора данных. Например, при обработке естественного языка модели машинного обучения могут анализировать и правильно распознавать намерения, стоящие за ранее неизвестными предложениями или сочетаниями слов. В распознавании изображений модель машинного обучения можно научить распознавать объекты, например автомобили или собак. Модель машинного обучения может выполнять такие задачи, «обучив» ее на большом наборе данных. Во время обучения алгоритм машинного обучения оптимизируется для поиска определенных закономерностей или выходных данных из набора данных в зависимости от задачи. Результат этого процесса — часто компьютерная программа с определенными правилами и структурами данных — называется моделью машинного обучения.
Что такое алгоритм машинного обучения?
Алгоритм машинного обучения — это математический метод поиска закономерностей в наборе данных. Алгоритмы машинного обучения часто основаны на статистике, исчислении и линейной алгебре. Некоторые популярные примеры алгоритмов машинного обучения включают линейную регрессию, деревья решений, случайный лес и XGBoost.
Что такое модельное обучение в машинном обучении?
Процесс запуска алгоритма машинного обучения на наборе данных (называемом обучающими данными) и оптимизации алгоритма для поиска определенных шаблонов или выходных данных называется обучением модели. Полученная функция с правилами и структурами данных называется обученной моделью машинного обучения.
Какие существуют типы машинного обучения?
В целом, большинство методов машинного обучения можно разделить на обучение с учителем, обучение без учителя и обучение с подкреплением.
Что такое контролируемое машинное обучение?
В контролируемом машинном обучении алгоритму предоставляется набор входных данных, и он вознаграждается или оптимизируется для достижения набора определенных выходных данных. Например, контролируемое машинное обучение широко используется в распознавании изображений с использованием метода, называемого классификацией. Контролируемое машинное обучение также используется для прогнозирования демографических показателей, таких как рост населения или показатели здоровья, с использованием метода, называемого регрессией.
Например, контролируемое машинное обучение широко используется в распознавании изображений с использованием метода, называемого классификацией. Контролируемое машинное обучение также используется для прогнозирования демографических показателей, таких как рост населения или показатели здоровья, с использованием метода, называемого регрессией.
Что такое неконтролируемое машинное обучение?
В неконтролируемом машинном обучении алгоритму предоставляется входной набор данных, но он не вознаграждается и не оптимизируется для конкретных выходных данных, а вместо этого обучается группировать объекты по общим характеристикам. Например, механизмы рекомендаций в интернет-магазинах основаны на неконтролируемом машинном обучении, в частности на методе, называемом кластеризацией.
Что такое обучение с подкреплением?
При обучении с подкреплением алгоритм обучается с помощью множества экспериментов методом проб и ошибок. Обучение с подкреплением происходит, когда алгоритм постоянно взаимодействует с окружающей средой, а не полагается на обучающие данные. Один из самых популярных примеров обучения с подкреплением — автономное вождение.
Один из самых популярных примеров обучения с подкреплением — автономное вождение.
Какие существуют модели машинного обучения?
Существует множество моделей машинного обучения, и почти все они основаны на определенных алгоритмах машинного обучения. Популярные алгоритмы классификации и регрессии подпадают под контролируемое машинное обучение, а алгоритмы кластеризации обычно развертываются в сценариях неконтролируемого машинного обучения.
Контролируемое машинное обучение
- Логистическая регрессия: логистическая регрессия используется для определения принадлежности входных данных к определенной группе или нет
- SVM: SVM или машины опорных векторов создают координаты для каждого объекта в n-мерном пространстве и используют гиперплоскость для группировки объектов по общим признакам классифицировать объекты на основе признаков
- Деревья решений: Деревья решений также являются классификаторами, которые используются для определения того, к какой категории относятся входные данные, путем обхода листьев и узлов дерева
- Линейная регрессия: Линейная регрессия используется для выявления взаимосвязей между интересующей переменной и входными данными и прогнозирования ее значений на основе значений входных переменных.

- kNN: метод k ближайших соседей включает в себя группировку ближайших объектов в наборе данных и поиск наиболее часто встречающихся или средних характеристик среди объектов.
- Случайный лес: Случайный лес — это набор множества деревьев решений из случайных подмножеств данных, в результате чего комбинация деревьев может быть более точной в прогнозировании, чем одно дерево решений.
- Алгоритмы повышения: Алгоритмы повышения, такие как Gradient Boosting Machine, XGBoost и LightGBM, используют ансамблевое обучение. Они объединяют прогнозы нескольких алгоритмов (например, деревьев решений) с учетом ошибки предыдущего алгоритма.
Неконтролируемое машинное обучение
- K-средних: Алгоритм K-средних находит сходство между объектами и группирует их в K различных кластеров.
- Иерархическая кластеризация: Иерархическая кластеризация строит дерево вложенных кластеров без указания количества кластеров.

Что такое дерево решений в машинном обучении (ML)?
Дерево решений — это прогностический подход в машинном обучении для определения того, к какому классу принадлежит объект. Как следует из названия, дерево решений представляет собой древовидную блок-схему, в которой класс объекта определяется шаг за шагом с использованием определенных известных условий. Дерево решений, визуализированное в домике у озера Databricks. Источник: https://www.databricks.com/blog/2019/05/02/detecting-financial-fraud-at-scale-with-decision-trees-and-mlflow-on-databricks.html
Что такое регрессия в машинном обучении?
Регрессия в науке о данных и машинном обучении — это статистический метод, который позволяет прогнозировать результаты на основе набора входных переменных. Результат часто является переменной, которая зависит от комбинации входных переменных. Модель линейной регрессии, выполненная на Databricks Lakehouse. Источник: https://www. databricks.com/blog/2015/06/04/simplify-machine-learning-on-spark-with-databricks.html
databricks.com/blog/2015/06/04/simplify-machine-learning-on-spark-with-databricks.html
Что такое классификатор в машинном обучении?
Классификатор — это алгоритм машинного обучения, который присваивает объекту членство в категории или группе. Например, классификаторы используются для определения того, является ли электронное письмо спамом или является ли транзакция мошеннической.
Сколько моделей существует в машинном обучении?
Много! Машинное обучение — это развивающаяся область, и всегда разрабатываются новые модели машинного обучения.
Какая модель лучше всего подходит для машинного обучения?
Модель машинного обучения, наиболее подходящая для конкретной ситуации, зависит от желаемого результата. Например, чтобы предсказать количество покупок автомобилей в городе на основе исторических данных, наиболее полезным может быть такой метод обучения с учителем, как линейная регрессия. С другой стороны, чтобы определить, купит ли потенциальный клиент в этом городе автомобиль, учитывая его доход и историю поездок на работу, лучше всего подойдет дерево решений.
Что такое развертывание модели в машинном обучении (ML)?
Развертывание модели — это процесс предоставления модели машинного обучения для использования в целевой среде — для тестирования или производства. Модель обычно интегрируется с другими приложениями в среде (такими как базы данных и пользовательский интерфейс) через API. Развертывание — это этап, после которого организация может окупить огромные инвестиции, сделанные в разработку модели. Полный жизненный цикл модели машинного обучения в Databricks Lakehouse. Источник: https://www.databricks.com/blog/2019/09/18/productionizing-machine-learning-from-deployment-to-drift-detection.html
Что такое модели глубокого обучения?
Модели глубокого обучения — это класс моделей машинного обучения, которые имитируют то, как люди обрабатывают информацию. Модель состоит из нескольких уровней обработки (отсюда и термин «глубокий») для извлечения признаков высокого уровня из предоставленных данных. Каждый уровень обработки передает более абстрактное представление данных на следующий уровень, а последний уровень обеспечивает более человеческое понимание. В отличие от традиционных моделей машинного обучения, которые требуют маркировки данных, модели глубокого обучения могут обрабатывать большие объемы неструктурированных данных. Они используются для выполнения более похожих на человека функций, таких как распознавание лиц и обработка естественного языка. Упрощенное представление глубокого обучения. Источник: https://www.databricks.com/discover/pages/the-democratization-of-artificial-intelligence-and-deep-learning
Каждый уровень обработки передает более абстрактное представление данных на следующий уровень, а последний уровень обеспечивает более человеческое понимание. В отличие от традиционных моделей машинного обучения, которые требуют маркировки данных, модели глубокого обучения могут обрабатывать большие объемы неструктурированных данных. Они используются для выполнения более похожих на человека функций, таких как распознавание лиц и обработка естественного языка. Упрощенное представление глубокого обучения. Источник: https://www.databricks.com/discover/pages/the-democratization-of-artificial-intelligence-and-deep-learning
Что такое машинное обучение временных рядов?
Модель машинного обучения с временными рядами — это модель, в которой одной из независимых переменных является последовательная продолжительность минут, дней, лет и т. д.), и она имеет отношение к зависимой или прогнозируемой переменной. Модели машинного обучения временных рядов используются для прогнозирования событий с привязкой ко времени, например погоды на будущей неделе, ожидаемого количества клиентов в будущем месяце, прогноза доходов на будущий год и т.