Примеры рычажный механизм: Рычажные механизмы. Часть 1. | 5ти томное издание «Методы Проектирования», автор Игнатьев Н.П.
alexxlab | 22.03.2023 | 0 | Разное
2. Рычажные механизмы
Рычажные механизмы применяют в машинах, приборах и аппаратах для обеспечения требуемого движения рабочего органа. В рычажных механизмах, в отличии от зубчатого, кулачкового и других механизмов, каждое из звеньев представляет собой рычаг. Достоинства рычажных механизмов перед другими типами механизмов состоят в способности передавать большие силы, разнообразии движения выходного звена, высокой надежности, сравнительно низкой стоимости и др. Примеры рычажных механизмов приведены на рис. 1.2.
Структурный анализ состоит в представлении любого рычажного механизма без избыточных связей (q=0) в виде совокупности первичного (или основного) механизма и одной или нескольких структурных групп. Первичный (или основной) механизм – это ведущее (начальное) звено, которому приписывается обобщенная координата, и стойка. Число первичных механизмов равно числу степеней свободы механизма.
Понятие структурной
группы введено русским ученым
Л.
Для плоской группы, содержащей лишь пары V класса (низшие пары), уравнение Чебышева будет
(2.1)
где – число степеней свободы плоской структурной группы; и – число звеньев и низших пар структурной группы Ассура. Отсюда а поскольку и могут быть только целыми числами, то их значения равны: .
Порядок структурной
группы определяется числом элементов
пар, которыми она присоединяется к
имеющимися механизму; первая группа
присоединяется к первичному механизму,
каждая последующая – к полученному
механизму, при этом нельзя присоединять
группу к одному звену.
Класс структурной группы (по И.И. Артоболевскому) определяется числом кинематических пар, образующих наиболее сложный замкнутый контур группы.
Самая простая структурная группа (=2, =3) состоит из двух звеньев и трех пар. Это группа II класса 2-го порядка или двухповодковая группа. Поводки – это звенья группы, обладающие свободным элементом кинематической пары, служащим для присоединения группы к механизму.
Т.к. кинематические пары V класса могут быть вращательными и поступательными, двухповодковые группы имеют пять видов, различающихся числом и местом размещения поступательных пар (рис. 2.1). Штриховой линией показана условная стойка, обеспечивающая нулевую степень подвижности группы.
На рис. 2.2, а показана группа III класса 3 порядка или
трехповодковая группа со звеном 4,
входящим в три кинематические пары;
такое звено называют базисным. На рис.
2.2, б показана группа IV
класса 2 порядка. Обе группы имеют одни
вращательные пары, но они могут содержать
одну или несколько поступательных пар
и имеют соответственно большее число
видов.
Обе группы имеют одни
вращательные пары, но они могут содержать
одну или несколько поступательных пар
и имеют соответственно большее число
видов.
а)
б)
Могут быть образованы группы и более высоких классов, но они редко применяются в реальных механизмах.
Класс механизма определяется наивысшим классом входящей в него структурной группы. Класс механизма зависит и от выбора первичных механизмов. Первичный механизм считают механизмом I класса.
Структурные группы пространственных механизмов без избыточных связей могут быть отражены формулой (1.1), если и , но здесь они не рассматриваются.
Проведение структурного анализа механизмов необходимо для построения рациональных алгоритмов их кинематического и силового анализа и использовано будет дальше.
Решение задач по теории механизмов и машин
Решение задач по теории механизмов и машин (ТММ) для студентов очной, заочной и дистанционной форм обучения.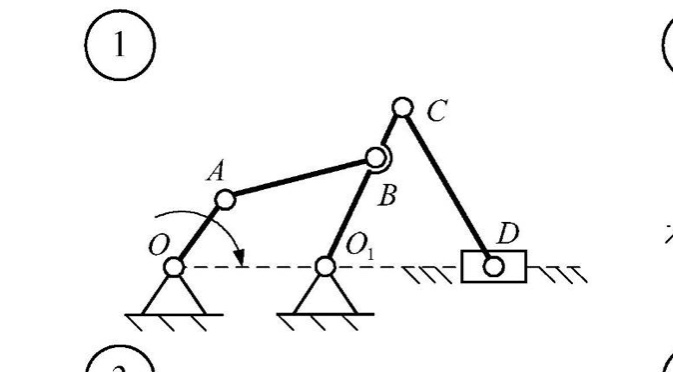
Выполнение курсовых работ >
Сохранить и поделиться с друзьями
1 Исследование и проектирование плоских рычажных механизмов
Методы кинематического и кинетостатического анализов, а в значительной степени и методы синтеза механизмов, увязаны с их структурой, т. е. способом образования механизмов. Поэтому исследование рычажного механизма необходимо начинать со структурного анализа. Методы структурного, кинематического и силового исследования рассмотрим на конкретном примере, приведенном на рисунке 1.
Рисунок 1 – Кинематическая схема плоского рычажного механизма
1.1 Структурный анализ плоского механизма
1.2 Кинематическое исследование плоского механизма
Задачей кинематики механизмов является изучение движения звеньев вне зависимости от сил, действующих на эти звенья. Кинематический анализ считается законченным, если для каждого звена механизма определены положение, скорость и ускорение двух его точек (или положение, скорость и ускорение одной точки звена и угловая координата, угловые скорость и ускорение этого звена).
Названные задачи могут быть решены графическим, графоаналитическим и аналитическим методами.
1.2.1 Построение положений звеньев механизма
1.2.4 Кинематическое исследование механизма методом планов скоростей и ускорений
1.2.2 Построение графика перемещений заданного звена
1.2.3 Построение диаграмм скоростей и ускорений методом графического дифференцирования
1.2.5 Аналитический метод кинематического исследования плоских рычажных механизмов
При этом методе все звенья, характерные размеры и перемещения звеньев изображаются в виде векторов. В результате образуются векторные многоугольники, на основе которых составляются векторные уравнения.
Рассматривая эти векторные уравнения в проекциях на оси произвольно выбранной системы координат, получают систему алгебраических уравнений для определения перемещений звеньев механизма (угловых – для звеньев, совершающих вращательное движение, и линейных – для звеньев, двигающихся поступательно).

При выполнении курсового проекта по курсу теории механизмов и машин студенту необходимо с помощью ЭВМ определить перемещения, скорости и ускорения выходного звена (звено №5) для 24 положений механизма. Для этого, опираясь на изложенный выше принцип, записывают уравнения перемещений (угловых или линейных в зависимости от задания) выходного звена №5 как функцию угла поворота входного звена (звено №1).
Полученное уравнение (или ряд уравнений) перемещений вводят в ЭВМ. Дифференцирование уравнений для определения скоростей и ускорений выходного звена производится на ЭВМ на основе алгоритма графического дифференцирования.
1.2.5.1 Пример расчета механизма с поступательно движущимся выходным звеном
1.2.5.2 Пример расчета рычажного механизма с выходным звеном, совершающим вращательное движение
1.3 Силовой расчет плоского рычажного механизма
1.3.1 Определение сил и моментов сил инерции
3.2 Силовой расчет по методу Н.Г. Бруевича
1.
1.3.3 Определение потерь мощности на трение в кинематических парах
1.3.4 Определение уравновешивающего момента методом Н.Е. Жуковского
2 Кинематический анализ и геометрический синтез зубчатого механизма
2.1 Кинематический анализ редуктора
2.2 Геометрический расчет пары зубчатых колес, нарезанных стандартным инструментом реечного типа
2.3 Построение картины внешнего эвольвентного зацепления
3 Динамический синтез кулачкового механизма
3.1 Построение графиков движения толкателя
3.2 Определение величины окружности минимального радиуса кулачка
Величина окружности минимального радиуса теоретического профиля кулачка для механизмов с роликовым толкателем определяется из условия отсутствия заклинивания, т.е. угол передачи движения не должен быть меньше заданного γmin.
Для кулачкового механизма с поступательно движущимся толкателем, имеющим плоскую тарелку, величина окружности минимального радиуса кулачка определяется из условия выпуклости его профиля.
3.2.1 Кулачковый механизм с поступательно движущимся точечным или роликовым толкателем
3.2.2 Кулачковый механизм с коромысловым роликовым толкателем
3.2.3 Кулачковый механизм с поступательно движущимся плоским толкателем
3.3 Построение профиля кулачка
3.4 Определение усилия пружины, обеспечивающей силовое замыкание высшей пары
Лекции по ТММ >
Другие примеры решений >
Помощь с решением задач >
Сохранить или поделиться с друзьями
Вы находитесь тут:
На нашем сайте Вы можете получить решение задач и онлайн помощь
Подробнее
Стоимость мы сообщим в течение 5 минут
на указанный вами адрес электронной почты.
Если стоимость устроит вы сможете оформить заказ.
НАБОР СТУДЕНТА ДЛЯ УЧЁБЫ
На нашем сайте можно бесплатно скачать:
– Рамки A4 для учебных работ
– Миллиметровки разного цвета
– Листы в клетку и в линейку
Сохранить или поделиться с друзьями
Помощь с решением
Поиск формул и решений задач
3.
 10: Генетическая связь – Биология LibreTexts
10: Генетическая связь – Биология LibreTexts- Последнее обновление
- Сохранить как PDF
- Идентификатор страницы
- 6502
Что значит быть связанным?
Для пары рук приведенное выше изображение может указывать на определенный тип связи. Для генов это может означать, что их очень трудно разделить.
Сцепление
Гены, расположенные на одной и той же хромосоме, называются сцепленными генами . Аллели этих генов имеют тенденцию сегрегировать вместе во время мейоза, если только они не разделены кроссинговером. Кроссинговер происходит, когда две гомологичные хромосомы обмениваются генетическим материалом во время мейоза I.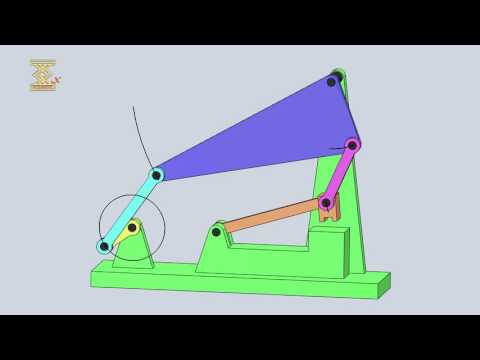 Чем ближе друг к другу расположены два гена в хромосоме, тем меньше вероятность того, что их аллели будут разделены кроссинговером. По следующей ссылке вы можете посмотреть анимацию, показывающую, как гены одной и той же хромосомы могут быть разделены путем кроссинговера: www.biostudio.com/d_%20Meioti…ed%20Genes.htm.
Чем ближе друг к другу расположены два гена в хромосоме, тем меньше вероятность того, что их аллели будут разделены кроссинговером. По следующей ссылке вы можете посмотреть анимацию, показывающую, как гены одной и той же хромосомы могут быть разделены путем кроссинговера: www.biostudio.com/d_%20Meioti…ed%20Genes.htm.
Сцепление объясняет, почему некоторые характеристики часто наследуются вместе. Например, гены цвета волос и цвета глаз связаны, поэтому определенные цвета волос и глаз, как правило, наследуются вместе, например, светлые волосы с голубыми глазами и каштановые волосы с карими глазами. Какие еще человеческие черты встречаются вместе? Как вы думаете, они могут контролироваться сцепленными генами?
Гены, сцепленные с полом
Гены, расположенные на половых хромосомах, называются генами, сцепленными с полом . Большинство генов, сцепленных с полом, находятся в Х-хромосоме, потому что в Y-хромосоме относительно мало генов. Строго говоря, генов на Х-хромосоме 9. 0026 Х-сцепленные гены , но для их обозначения часто используется термин сцепленный с полом.
0026 Х-сцепленные гены , но для их обозначения часто используется термин сцепленный с полом.
Признаки, сцепленные с полом, обсуждаются на http://www.youtube.com/watch?v=-ROhfKyxgCo (14:19).
Картирование сцепления
Сцепление можно оценить, определив, как часто происходит кроссинговер между двумя генами на одной и той же хромосоме. Гены на разных (негомологичных) хромосомах не сцеплены. Они распределяются независимо друг от друга во время мейоза, поэтому у них есть 50-процентный шанс оказаться в разных гаметах. Если гены обнаруживаются в разных гаметах менее чем в 50 % случаев (то есть они, как правило, наследуются вместе), предполагается, что они находятся в одной (гомологичной) хромосоме. Они могут быть разделены путем кроссинговера, но это, вероятно, происходит менее чем в 50% случаев. Чем ниже частота кроссинговера, тем ближе друг к другу в одной и той же хромосоме предположительно расположены гены. Частоты кроссинговера можно использовать для построения карты сцепления, подобной той, что в Рисунок ниже. Карта сцепления показывает расположение генов на хромосоме.
Частоты кроссинговера можно использовать для построения карты сцепления, подобной той, что в Рисунок ниже. Карта сцепления показывает расположение генов на хромосоме.
Карта сцепления X-хромосомы человека. На этой карте сцепления показано расположение нескольких генов на Х-хромосоме. Некоторые гены кодируют нормальные белки. Другие кодируют аномальные белки, которые приводят к генетическим нарушениям. Какая пара генов, по вашему мнению, будет иметь более низкую частоту кроссинговера: гены, кодирующие гемофилию А и дефицит G6PD, или гены, кодирующие протан и Xm?
Резюме
- Сцепленные гены расположены на одной и той же хромосоме.
- Гены, сцепленные с полом, расположены на половой хромосоме, а гены, сцепленные с полом, расположены на Х-хромосоме.
- Частота кроссинговера между генами используется для построения карт сцепления, которые показывают расположение генов на хромосомах.


Узнать больше
Узнать больше I
Используйте эти ресурсы, чтобы ответить на следующие вопросы.
- Рекомбинация и оценка расстояния между генами на http://www.ndsu.edu/pubweb/~mcclean/plsc431/linkage/linkage2.htm.
- Что такое рекомбинация?
- Что определяет степень рекомбинации между двумя генами?
- Что такое рекомбинантные гаметы?
- Что такое сантиморган?
Узнайте больше II
- T. H. Morgan на сайте www.dnalc.org/resources/nobel/morgan.html.
Обзор
- Что такое сцепленные гены?
- Объясните, как бы вы построили карту сцепления для человеческой хромосомы. Какие данные вам понадобятся?
- Люди с рыжими волосами обычно имеют очень светлую кожу. Каким может быть генетическое объяснение этого наблюдения?
- Как часто происходит кроссинговер между несцепленными генами? Поясните свой ответ.

Эта страница под названием 3.10: Genetic Linkage распространяется под лицензией CK-12 и была создана, изменена и/или курирована Фондом CK-12 с использованием исходного контента, который был отредактирован в соответствии со стилем и стандартами платформы LibreTexts; подробная история редактирования доступна по запросу.
ПОД ЛИЦЕНЗИЕЙ
- Наверх
- Была ли эта статья полезной?
- Тип изделия
- Раздел или Страница
- Автор
- Фонд СК-12
- Лицензия
- СК-12
- Программа OER или Publisher
- СК-12
- Показать оглавление
- нет
- Теги
- источник@http://www. ck12.org/book/CK-12-Biology-Concepts
- источник@http://www.
 ck12.org/book/CK-12-Biology-Concepts
ck12.org/book/CK-12-Biology-ConceptsПримеры механизмов
с
Сьюзен Фингер
Стефани Беренс
1.1 Четырехрычажные тяги
Связь состоит из ссылок и нижние пары. Простейший Рычажный механизм с обратной связью представляет собой четырехзвенниковый механизм, который имеет три движущихся звенья, одно фиксированное звено и четыре шарнирных соединения. Связь с одной ссылкой фиксированный механизм . Вы можете загрузить следующие четыре такта связь с SimDesign из файламеханизмов/fourbar.sim.
Этот механизм имеет три подвижных звена. Два из них привязаны к кадр, который не показан на этой картинке. В SimDesign вы можете прикрепите эти две ссылки к фону.
Сколько степеней свободы
(DOF) есть ли у этого механизма? Если он есть, вы можете наложить один
ограничение на механизм, чтобы он имел определенное движение. Для
Например, вы можете потянуть за прибитое звено слева (сделав его входная ссылка ) и он будет вращаться вокруг гвоздя. Правильная ссылка
(теперь выходное звено ) будет совершать колебательные движения. Предполагать
вы кладете ручку на вершину звена в форме треугольника. (Треугольник
также называется ссылкой. Ссылка не обязательно представляет собой простую линию
тело). Перо проследит свой путь. Звено в форме треугольника соединяет
две движущиеся оси и соединяют входное и выходное движение;
поэтому он называется Муфта .
Правильная ссылка
(теперь выходное звено ) будет совершать колебательные движения. Предполагать
вы кладете ручку на вершину звена в форме треугольника. (Треугольник
также называется ссылкой. Ссылка не обязательно представляет собой простую линию
тело). Перо проследит свой путь. Звено в форме треугольника соединяет
две движущиеся оси и соединяют входное и выходное движение;
поэтому он называется Муфта .
Рычаги имеют разные функции. Функции классифицируются
в зависимости от основной цели механизма:
- Генерация функции : относительное движение между звеньями соединенный с рамой,
- Генерация пути : путь точки трассировки или
- Генерация движения : движение соединительного звена.
1.1.1 Кран
Приложением генерации пути является кран, в котором нужен горизонтальный след.
1.1.2 Капюшон
Примером генерации движения является капот, который открывается и закрывается.
1.1.3 Параллелограммный механизм
В параллелограммном четырехзвенном соединении, ориентация сцепки не меняется во время движения. На рисунке показан загрузчик.
1.2 Кривошипно-кривошипные механизмы
Механизм с четырьмя стержнями имеет некоторые специальные конфигурации, созданные сделать одну или несколько ссылок бесконечной по длине. Ползун-кривошип (или кривошип и ползун) механизм, показанный ниже, представляет собой четырехзвенниковую связь с ползунком, заменяющим бесконечно длинная выходная ссылка.
Потяните за рукоятку этого механизма, и вы увидите, что он перемещается вращательное движение в поступательное. Большинство механизмов приводится в движение двигателями, а ползунковые кривошипы часто используются для преобразования вращательного движения в линейное движение.
1.2.1 Кривошип и поршень
Вы также можете использовать ползунок в качестве входного звена и рукоятку в качестве
выходная ссылка.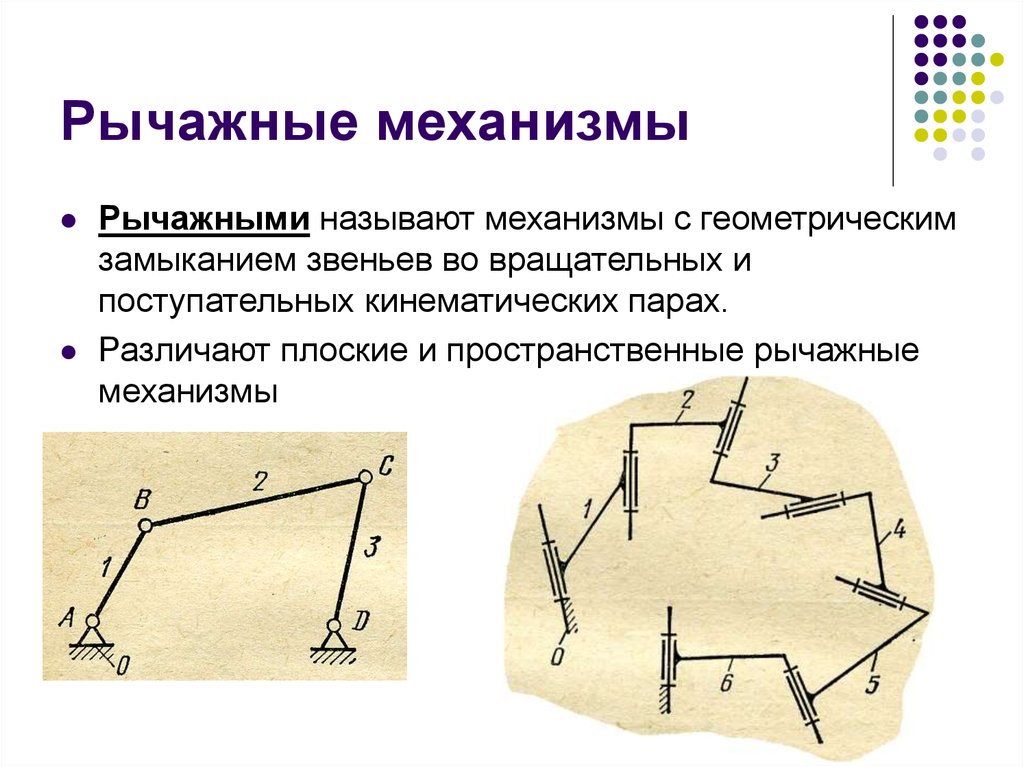 В этом случае механизм передает
поступательное движение во вращательное. Поршни и кривошип во внутреннем
двигатель внутреннего сгорания является примером механизма этого типа. Соответствующий
Файл SimDesign
механизмы/combustion.sim.
В этом случае механизм передает
поступательное движение во вращательное. Поршни и кривошип во внутреннем
двигатель внутреннего сгорания является примером механизма этого типа. Соответствующий
Файл SimDesign
механизмы/combustion.sim.
Вы можете задаться вопросом, почему есть еще один ползунок и ссылка на левый. Этот механизм имеет два мертвые точки. ползунок и ссылка слева помогают механизму преодолевать эти мертвые точки.
1.2.2 Блок подачи
Одним из интересных применений кривошипа является блок кормушка. Файл SimDesign можно найти в механизмы/block.feeder.sim
Связи хоть и полезны, но не могут выполнять все возможные движения. Для
Например, если выходное звено должно оставаться неподвижным в течение
определенный период времени, пока входное звено продолжает вращаться, связи
нельзя использовать. Кулачковые механизмы могут реализовать любой требуемый результат
движение. Состав кулачковых механизмов прост: кулачок,
следящий и рама. (Вы можете найти пружины, используемые в кулачковом механизме для
держите толкатель и кулачок в контакте, но это не является частью
Кулачковый механизм.)
(Вы можете найти пружины, используемые в кулачковом механизме для
держите толкатель и кулачок в контакте, но это не является частью
Кулачковый механизм.)
2.1 Вращающийся кулачок/поступательный толкатель
Если вы повернете кулачок, толкатель будет двигаться. Вес последователь держит их в контакте. Это называется гравитацией . ограничитель кулачок.
2.2 Вращающийся кулачок/вращающийся толкатель
Файл SimDesign — механизмы/cam.oscillating.sim. Уведомление который ролик используется на конце толкателя. Кроме того, пружина используется для поддержания контакта кулачка и ролика.
Если попытаться вычислить степени свободы (степени свободы) механизма, надо представить, что ролик приваривается к толкателю, потому что вращение ролика не влиять на движение ведомого.
Есть много видов передач.
Следующие примеры представляют собой эвольвентные прямозубые зубчатые колеса. Мы используем слово эвольвента , потому что контур зубьев шестерни изогнут внутрь. Существует множество терминов, параметров и принципов работы зубчатых передач.
Одним из важных понятий является отношение скоростей , , которое
отношение скорости вращения ведущей шестерни к скорости вращения
ведомые шестерни.
Существует множество терминов, параметров и принципов работы зубчатых передач.
Одним из важных понятий является отношение скоростей , , которое
отношение скорости вращения ведущей шестерни к скорости вращения
ведомые шестерни.
Количество зубьев на этих шестернях 15 и 30 соответственно. Если шестерня с 15 зубьями является ведущей а 30-зубчатая шестерня является ведомой, их передаточное число равно 2.
Пример набора шестерен находится в файлемеханизмы/gear10.30.sim.
3.1 Рейка и шестерня
Когда количество зубьев шестерни становится бесконечным, центр шестерня уходит в бесконечность. Шестерня становится стойкой. Следующее на фото рейка и шестерня. Соответствующий файл SimDesign механизмы/gear.rack.sim.
Шестерню можно потянуть, чтобы она вращалась и приводила в движение рейку. Ты также можно тянуть рейку по направляющей и водить шестерню.
3.2 Обычные зубчатые передачи
Зубчатые передачи состоят из двух или более шестерен, которые передают движение от
одной оси к другой. Обычные зубчатые передачи имеют оси относительно
рама для всех передач, составляющих поезд.
Обычные зубчатые передачи имеют оси относительно
рама для всех передач, составляющих поезд.
3.3 Планетарная передача
Файл SimDesign — механизмы/gear.planet.sim. Так как солнце механизм (самая большая шестерня) фиксирована, степень свободы вышеописанного механизма одна. Когда вы тянете рычаг или планету, механизм имеет определенное движение. Если солнечная шестерня не заморожена, относительное движение сложно контролировать.
4.1 Храповой механизм
Колесо с зубьями подходящей формы, получающее прерывистое круговое движение. движение от колеблющегося элемента, представляет собой храповое колесо . На рисунке ниже показан простой храповик механизм.
А — храповое колесо, В — колебательное звено. Прикреплен к Б
представляет собой собачку , которая представляет собой звено, предназначенное для зацепления с храповым механизмом.
зубья, чтобы колесо не двигалось в одном направлении.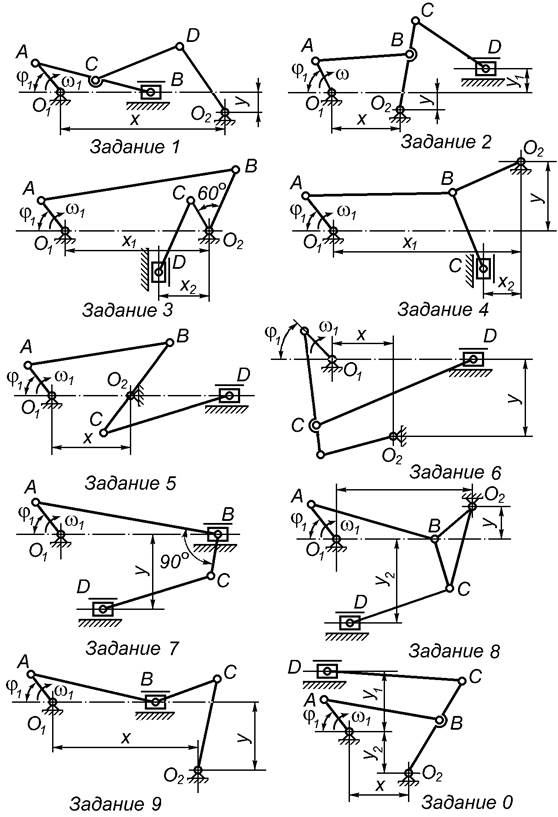 Этот
механизм имеет дополнительную собачку в точке D. Когда звено B перемещается в
против часовой стрелки, собачка C толкает колесо через
частичное вращение.
Когда звено B движется по часовой стрелке, собачка C скользит по точкам
зубья, в то время как колесо остается в покое из-за неподвижной собачки D.
Величина возможного обратного движения зависит от высоты тона.
зубы. Чем меньше зубья, тем меньше обратное движение.
контактные поверхности колеса и собачки должны быть наклонены так, чтобы они
не отвлекаться под давлением.
Этот
механизм имеет дополнительную собачку в точке D. Когда звено B перемещается в
против часовой стрелки, собачка C толкает колесо через
частичное вращение.
Когда звено B движется по часовой стрелке, собачка C скользит по точкам
зубья, в то время как колесо остается в покое из-за неподвижной собачки D.
Величина возможного обратного движения зависит от высоты тона.
зубы. Чем меньше зубья, тем меньше обратное движение.
контактные поверхности колеса и собачки должны быть наклонены так, чтобы они
не отвлекаться под давлением.
Соответствующий файл SimDesign — механизмы/ratchet.sim. четырехзвенная связь справа создает колебательное вращение для link B. Потяните рукоятку, чтобы посмотреть, как работает храповик.
4.2 Женевское колесо
Интересным примером прерывистой передачи является Женевское колесо.
В этом механизме на каждый оборот ведущего колеса А ведомое
колесо В делает четверть оборота. Штифт, прикрепленный к ведущему колесу А,
перемещается в пазах, вызывая движение колеса B. Контакт между
нижняя часть водителя А с соответствующей полой частью колеса
B, удерживает его на месте, когда штифт находится вне паза. Колесо А
срежьте рядом со штифтом, как показано, чтобы обеспечить зазор для
колесо B во время движения. Если один из слотов закрыт, А может сделать меньше
чем один оборот в любом направлении до того, как штифт ударит по
закрытая щель, останавливающая движение. Ранние часы, музыкальные шкатулки и т. д.,
использовались женевские колеса для предотвращения перекручивания. Из этого приложения
их также называют остановками в Женеве. В качестве упора колесо А крепится к
вал пружины, а В поворачивается вокруг оси ствола пружины.
количество пазов в B зависит от того, сколько раз пружинный вал
следует повернуть.
Контакт между
нижняя часть водителя А с соответствующей полой частью колеса
B, удерживает его на месте, когда штифт находится вне паза. Колесо А
срежьте рядом со штифтом, как показано, чтобы обеспечить зазор для
колесо B во время движения. Если один из слотов закрыт, А может сделать меньше
чем один оборот в любом направлении до того, как штифт ударит по
закрытая щель, останавливающая движение. Ранние часы, музыкальные шкатулки и т. д.,
использовались женевские колеса для предотвращения перекручивания. Из этого приложения
их также называют остановками в Женеве. В качестве упора колесо А крепится к
вал пружины, а В поворачивается вокруг оси ствола пружины.
количество пазов в B зависит от того, сколько раз пружинный вал
следует повернуть.
Файл SimDesign для Женевского колеса: “ geneva.sim “.
Вы можете попробовать этот механизм, потянув за Женевское колесо.
Полное оглавление
- 1. Рычажные механизмы
- 1.1 Четырехрычажные соединения
- 1.
- 1.
- 1.1 Четырехрычажные соединения
