Программа для построения звездочки цепной передачи: Расчет звездочки цепной передачи в Excel
alexxlab | 29.07.2023 | 0 | Разное
Расчет звездочки цепной передачи в Excel
Опубликовано 06 Авг 2016
Рубрика: Механика | 50 комментариев
До широкого распространения станков с ЧПУ зубья звездочек цепных передач нарезали чаще всего на обычных фрезерных станках дисковыми фрезами в делительных головках или – реже — червячными фрезами на зубофрезерных станках. Но для полного соответствия профиля зуба…
…при обработке дисковой фрезой теоретическому профилю необходимо для каждого числа зубьев звездочки изготовить «свою» фрезу. Производство огромной номенклатуры дорогостоящих фрез экономически нецелесообразно, и для цепи одного типоразмера стали делать 5 фрез, как некий компромисс между точностью получаемого профиля и стоимостью.
Фреза №1 – для z=7 и 8
Фреза №2 – для z=9…11
Фреза №3 – для z=12…17
Фреза №4 – для z=18…35
Фреза №5 – для z>35
Сегодня на станках плазменной, лазерной, электроэрозионной, гидроабразивной резки с ЧПУ, фрезерных с ЧПУ можно изготавливать без специального дорогостоящего инструмента звездочки цепных передач с профилями зубьев точно соответствующими теории. Это, безусловно, положительно сказывается на износостойкости и цепи и зубьев при эксплуатации передачи.
Это, безусловно, положительно сказывается на износостойкости и цепи и зубьев при эксплуатации передачи.
При создании управляющей программы для изготовления профилей зубьев звездочки цепной передачи в большинстве случаев необходимо получить или сделать dxf-файл с чертежом контура детали в натуральную величину (в масштабе 1:1).
Современные CAD-программы для конструкторов-механиков решают эту задачу за «пару кликов мышью». Представленный далее геометрический расчет звездочки цепной передачи в Excel покажет – «как они это делают» и поможет сделать чертеж тем, у кого нет этих дорогостоящих CAD-программ.
Расчет в Excel профиля звездочки.
Расчет звездочки цепной передачи выполняется по формулам Таблицы 1 и Таблицы 2 ГОСТ 591-69. Расчет некоторых дублирующих размеров я не стал выполнять, а оставшиеся, необходимые для прорисовки профиля параметры, расположил в таблице в порядке выполнения построений.
Программа в MS Excel:
Исходных данных — всего два, по ним автоматически определяются все расчетные параметры.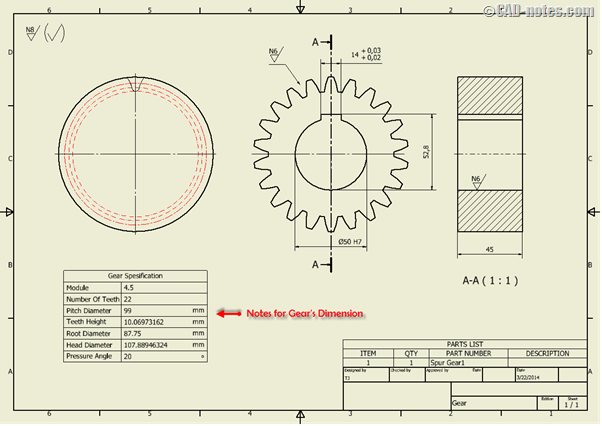 Пользователь вводит число зубьев звездочки и выбирает из выпадающего списка цепь по ГОСТ 13568-97, все остальное происходит автоматически!
Пользователь вводит число зубьев звездочки и выбирает из выпадающего списка цепь по ГОСТ 13568-97, все остальное происходит автоматически!
Проектировочный расчет в Excel роликовой цепной передачи, определяющий исходные данные для рассматриваемой программы, в подробном изложении найдете здесь.
Формулы:
Формулы в программе, как было замечено выше, расположены не в логической последовательности выполнения вычислений, а в порядке потребности в значениях размеров для выполнения геометрических построений.
9. λ=t/d1
10. K=f(λ)
при λ≤1,5 K=0,480
при 1,5<λ≤1,6 K=0,532
при 1,6<λ≤1,7 K=0,555
при 1,7<λ≤1,8 K=0,575
при λ>1,8 K=0,565
Последнее значение K явно выбивается из логической цепи чисел, но соответствует ГОСТ 591-69.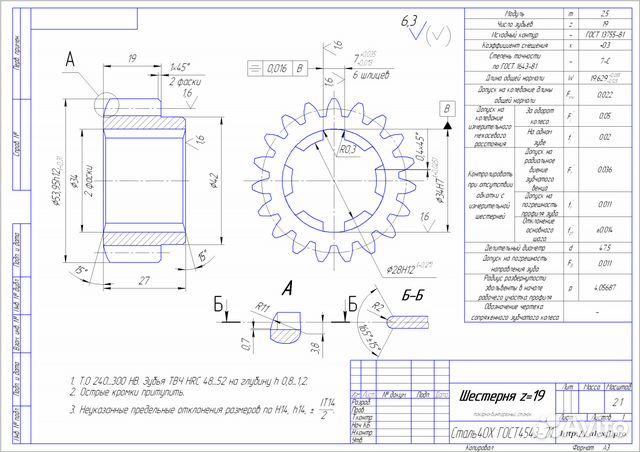 Ошибка в ГОСТе? Скорее всего — да. (Никто не удосужился за почти 50 лет ее исправить…) Однако, ошибка не критическая. Во многих источниках K=0,5 вне зависимости от значения λ.
Ошибка в ГОСТе? Скорее всего — да. (Никто не удосужился за почти 50 лет ее исправить…) Однако, ошибка не критическая. Во многих источниках K=0,5 вне зависимости от значения λ.
11. γ=180/z
12. De=t*(K+1/tg (γ))
13. dд=t/sin(γ)
14. Di=dд-2*r
15. e/2=0,015*t
В точных кинематических реверсивных передачах следует назначить e=0.
16. r=0,5025*d1+0,05
17. α=55-60/z
α=55-60/z
18. r1=0,8*d1+r
19. β=18-56/z
20. FG=d1*(1,24*sin(φ) — 0,8*sin(β))
21. φ=17-64/z
22. r2=d1*(1,24*cos (φ)+0,8*cos (β) -1,3025) -0,05
23. bn=f (b1)
при n=1 bn=0,93*b1-0,15
при n=2 и n=3 bn=0,90*b1-0,15
при n=4 bn=0,86*b1-0,3
24. Bn=(n-1)*A+bn
Bn=(n-1)*A+bn
25. Dc=t*1/tg (γ) -1,3*h
26. r3=1,7*d1
27. h3=0,8*d1
28. r4=f (t)
при t≤35 r4=1,6
при t>35 r4=2,5
Алгоритм построения профиля зуба:
1. Из центра звездочки проводим вертикальную осевую линию через центр будущей впадины и наклоненную на угол γ осевую линию, которая пройдет через центр зуба.
2. Из того же центра строим три окружности – выступов, с диаметром De; делительную, с диаметром dд; и впадин, с диаметром Di.
3. Чертим осевую линию параллельную вертикальной осевой, отступив от нее на расстояние, равное половине смещения — e/2.
4. Из центра O — пересечения делительного диаметра и смещенной осевой линии — строим дугу с радиусом r и углом α.
5. На продолжении отрезка EO находим точку O1 (EO1=r1) и проводим дугу радиусом r1 на угол β.
6. Из точки F откладываем отрезок FG под углом φ к наклонной осевой, проходящей через центр зуба.
7. На перпендикуляре к отрезку FG, проведенном из точки G, находим центр O2 (GO2=r2) и чертим из точки G дугу радиусом r2 до пересечения с диаметром окружности выступов.
Фронтальный профиль зуба построен. Осталось сделать зеркальную копию профиля вправо от вертикальной оси и размножить по всей окружности.
Построение поперечного профиля зубьев звездочки, думаю, не требует каких-либо дополнительных пояснений. Единственное, на что хотелось бы обратить внимание, это — выполнение диаметра обода Dc. Если его по невнимательности завысить, ролики цепи не «сядут» во впадину, и цепь будет опираться на звездочку торцами боковых пластин… (Недолго будет опираться…)
Заключение.
Расчет звездочки цепной передачи был выполнен в разрезе определения геометрических размеров профиля зубьев, достаточных для выполнения чертежа венца. Допуски на изготовление звездочки следует назначать по Таблице 3 ГОСТ591-69. В справочном приложении к этому ГОСТу есть обширные таблицы с рассчитанными параметрами звездочек для конкретных марок цепей. Часть данных из этих таблиц вы можете использовать для проверки выдаваемых программой в Excel результатов.
Допуски на изготовление звездочки следует назначать по Таблице 3 ГОСТ591-69. В справочном приложении к этому ГОСТу есть обширные таблицы с рассчитанными параметрами звездочек для конкретных марок цепей. Часть данных из этих таблиц вы можете использовать для проверки выдаваемых программой в Excel результатов.
Ссылка на скачивание файла: raschet-zvezdochki-cepnoj-peredachi (xls 107 KB).
Другие статьи автора блога
На главную
Статьи с близкой тематикой
Отзывы
Расчет звездочки цепной передачи по шагу цепи
Расчет звездочки цепной передачи по шагу цепиИзделия с зубчатой передачей находят даже в раскопках древнегреческих и древнеримских городов. Леонардо да Винчи не только написал «Мону Лизу», но и первым описал механизм передачи механической энергии на значительные расстояния при помощи двух валов (звездочек в современной интерпретации) и цепи. Но его изобретение еще долго оставалось невостребованным. Только на рубеже 18-го и 19-го начался этап бурного развития промышленности. И именно тогда зубчатой передаче нашли достойное применение.
И именно тогда зубчатой передаче нашли достойное применение.
За два столетия ее механизм существенно усовершенствовали. Для цепей разработали стандарты, регламентирующие шаг, диаметр и прочие параметры. Но проблема правильного построения звездочек остается неизменно актуальной.
Это связано с тем, что при проектировании валов необходимо одновременно учитывать несколько требований:
- вращательный момент с минимальной задержкой должен передаваться от ведущей звездочки на ведомую;
- движение цепи должно быть непрерывным и плавным;
- вся цепная передача в процессе работы должна оставаться в заданной плоскости.
Чтобы выполнить все перечисленные условия, звездочки следует подбирать строго в соответствии с предварительно проведенными расчетами.
Базовые параметры звездочек
В России производители звездочек обязаны работать по ГОСТ 591-69. В соответствии с ним для начала проектирования звездочки нужны следующие данные:
- Шаг цепи (t).

- Необходимое число зубцов на звездочке (z).
- Диаметр окружности зацепления (d1).
Геометрическая форма готового изделия зависит от следующих параметров:
- Диаметр делительной окружности (D дел).
- Диаметр окружности выступов (D выст).
- Радиус впадин (r).
Построение звездочки: как рассчитать необходимые параметры?
Чтобы получить звездочку, идеально соответствующую всем предъявляемым требованиям, расчеты проводят в соответствии с формулами, приведенными ниже:
- Оси шарниров цепных звеньев в процессе работы прилегают к делительной окружности. Чтобы рассчитать ее диаметр, потребуется формула:
- Следующий шаг предполагает определение окружности выступов по формуле:
- Определить радиус впадин позволяет формула:
- Рассчитать диаметр окружности впадин можно по формуле:
Для D выст допустимая погрешность не превышает 0,1 мм.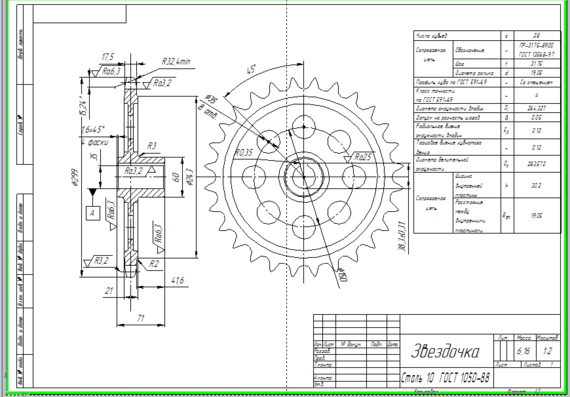 Для всех иных параметров отклонение не может превышать 0,01 мм.
Для всех иных параметров отклонение не может превышать 0,01 мм.
Конструктивные особенности ступицы и диска применительно к звездочкам цепных передач
Чтобы избежать деформаций диска, его неравномерного крепления и последующего биения в процессе вращения, его в большинстве случаев отливают вместе со ступицей. Как вариант, изготовление ведется на фрезерном станке.
Задача ступицы в данном случае — крепление диска к передающему или принимающему узлу оборудования с цепной передачей. Если в процессе изготовления и сборки вала соблюдены требования ГОСТ, при вращении диска не будет ни осевых, ни радиальных биений.
На практике при построении звездочки применяют следующие способы крепления вала:
- на шлицу. Этот актуально для цепных приводов, работающих на повышенных скоростях и/или под значительными нагрузками;
- на шпонки. Этот вариант используют, если скорость вращения вала невелика.
Диаметр ступицы подбирают так, чтобы она позволяла решать поставленную задачу, но сама не создавала избыточную нагрузку на механизм.
Если ступица требуется для узла из чугуна, ее диаметр стандартно равен диаметру вала * 1,65. Если же узел стальной, диаметр вала умножают на 1,55.
Другой важный параметр — длина ступицы. Стандартно для ее расчета диаметр вала умножают на числа из диапазона 1,2–1,5.
Из какого материала производят звездочки для цепных передач?
Механическая нагрузка — не единственный негативный фактор, влияющий на работоспособность цепей и звездочек. Есть еще кислоты, щелочи, конденсат и т. д. Это приводит к тому, что все узлы цепной передачи надлежит изготавливать из материалов, устойчивых к коррозии, нагрузкам: ударным, на разрыв и т. д.
Предпочтение отдают среднеуглеродистым сталям. Если изделие должно соответствовать особым требованиям, работать в особо сложных условиях, в состав вводят особые легирующие добавки. Уже готовую звездочку (отлитую или выточенную) дополнительно:
- пропускают через термическую обработку. Требуемая твердость — 45–55 ед.;
- либо подвергают цементированию.
 Глубина слоя составляет 1–1,5 мм. И только после этого помещают в печь ТВЧ. Твердость в этом случае должна составлять 55–60 ед.
Глубина слоя составляет 1–1,5 мм. И только после этого помещают в печь ТВЧ. Твердость в этом случае должна составлять 55–60 ед.
Для особых случаев используют цепи и звездочки не стальные, а из особых композитных материалов: текстолита, полиамидов, полиформальдегидов. В этом случае вся система работает с минимальным шумом и вибрацией. Звенья цепей практически не ударяются о зубья цепи. Но их используют в малоответственных транспортных системах, не находящихся постоянно под нагрузкой.
Чугун — еще один материал для построения и изготовления звездочек цепной передачи. Но сфера его применения ограничена. Такие изделия не предназначены для работы на больших скоростях. Разрешенный максимум — 2 м/с. Ограничения затрагивают и динамические нагрузки. Они должны быть минимальными.
Для повышения твердости чугунные цепные передачи проводят через закалку. Рекомендованное значение на выходе — 330–430 ед. по HB.
Цепи из чугуна часто устанавливают на тракторах, комбайнах, дорожной и строительной спецтехнике. В этом случае выбирают упрочненные чугуны, что позволяет снизить коэффициент трения. Если же вся система должна работать в условиях повышенных динамических нагрузок, звенья цепи и собственно звездочки покрывают тонким слоем тефлона.
В этом случае выбирают упрочненные чугуны, что позволяет снизить коэффициент трения. Если же вся система должна работать в условиях повышенных динамических нагрузок, звенья цепи и собственно звездочки покрывают тонким слоем тефлона.
Мы предлагаем
Построение геометрии роликовых цепей в модуле «Динамика многотельных систем»
Программа COMSOL Multiphysics® позволяет легко моделировать системы цепных приводов. В первой части этой серии блогов о моделировании цепных приводов вы узнаете, как создавать реалистичные геометрические модели сборок звездочек роликовых цепей с помощью встроенных параметрических геометрических деталей в библиотеке COMSOL Multiphysics Part Library.
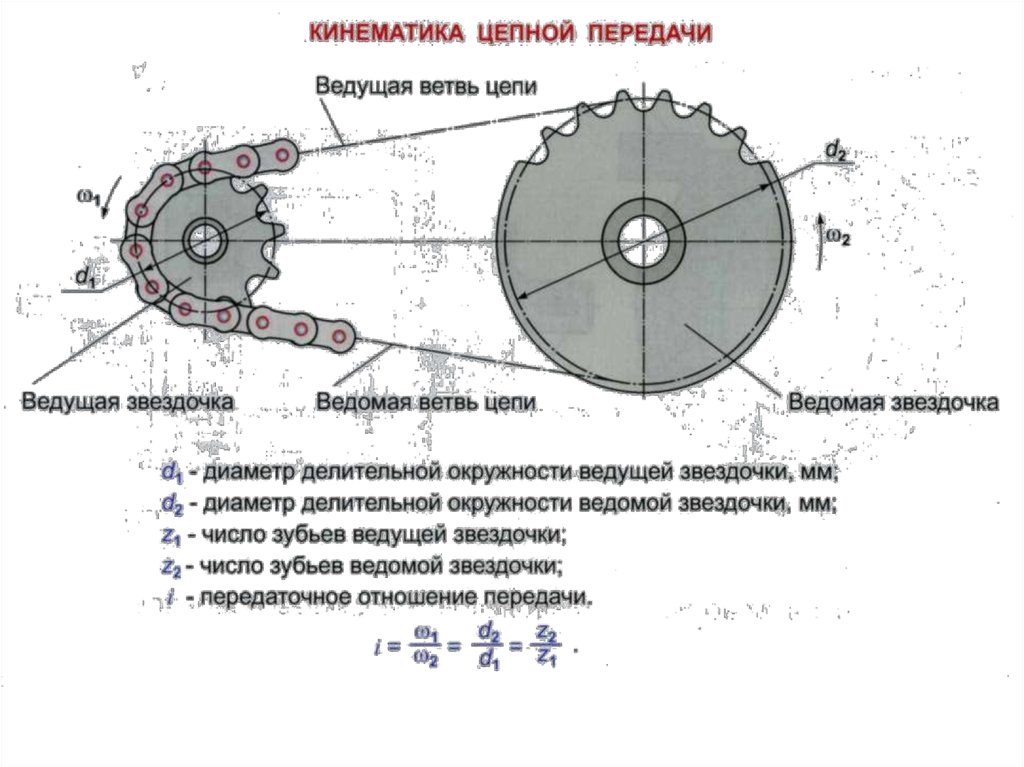
Знакомство с системами цепного привода
Вы знаете, насколько важна цепь на велосипеде. Когда вы нажимаете на педали и вращаете переднюю звездочку велосипеда, именно цепь передает это вращение на заднюю звездочку и связанное с ней колесо. Подобные сборки цепей и звездочек также используются во многих машинах для передачи мощности с одного вала на другой или для подъема тяжелых предметов.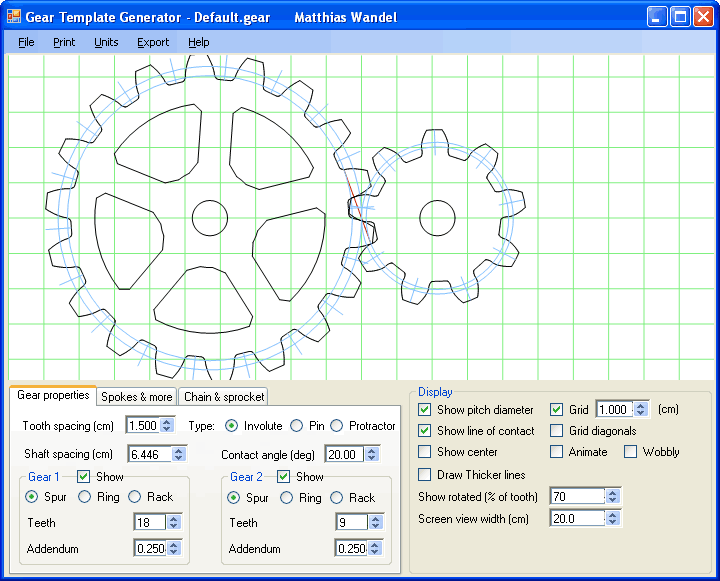
Цепной привод и шестерни велосипеда. Изображение 5 Cent Dollar — собственная работа. Под лицензией CC BY-SA 4.0 через Wikimedia Commons.
Цепные приводы представляют собой важный класс систем передачи энергии, широко используемых во многих отраслях промышленности. Их основное применение включает передачу крутящего момента или движения, транспортировку материала или синхронизацию движения между различными компонентами механической сборки. Цепные приводы, изготовленные из разных материалов и разных размеров, используются в самых разных устройствах, таких как автомобили, конвейеры и подъемные устройства, такие как вилочные погрузчики.
Двумя основными компонентами системы цепного привода являются цепь и звездочки. Цепь представляет собой набор звеньев, соединенных штифтовыми соединениями. Он наматывается на одно или несколько зубчатых колес, известных как звездочки, которые обычно устанавливаются на определенных валах в машине. Цепь передает движение от одной звездочки к другой, зацепляясь и скользя по зубьям соприкасающейся звездочки.
В зависимости от назначения цепь и звездочка в цепном приводе могут быть разных типов. В то время как бесшумные цепи, пластинчатые цепи и цепи с плоской вершиной являются одними из доступных типов цепей, наиболее часто используемым типом для передачи мощности является роликовая цепь. Точно так же существует множество стилей звездочек, которые подходят для особых нужд.
Выбор правильной системы передачи энергии для вашего применения зависит от многих факторов. Хотя цепные приводы обладают многими преимуществами по сравнению с зубчатыми и ременными приводами, им также не хватает некоторых достоинств этих альтернатив. Проскальзывание и потери на трение, наблюдаемые в ременной передаче, минимальны в цепных передачах. По сравнению с ременными приводами они компактны, просты в установке и устойчивы к экстремальным погодным условиям. Однако точность, необходимая для выравнивания, больше в случае цепного привода, чем в случае ременного привода. Цепные передачи предпочтительнее шестерен для соединения валов, расположенных относительно далеко друг от друга. Но по сравнению с шестернями, которые можно использовать для параллельных и непараллельных валов, цепная передача может быть установлена только на параллельных валах.
Но по сравнению с шестернями, которые можно использовать для параллельных и непараллельных валов, цепная передача может быть установлена только на параллельных валах.
Моделирование системы цепного привода
По разным причинам моделирование динамики узла цепной звездочки, широко известного как система цепного привода, является сложной задачей. Для моделирования системы цепного привода важно смоделировать цепной привод со всеми его соответствующими компонентами. Однако, поскольку типичный цепной привод состоит из нескольких звеньев, соединенных и обернутых вокруг нескольких звездочек, самый первый шаг построения геометрии требует большого количества времени.
Анимационная 3D-модель системы цепного привода.
Даже после создания правильной геометрии настройка правильной физики для воспроизведения поведения системы является еще одной проблемой. Например, чтобы смоделировать механизмы зацепления и расцепления звеньев цепи со звездочками, необходимо смоделировать структурный контакт между зубом звездочки и контактирующими звеньями цепи. Точно так же вращение звена цепи по отношению к соседнему звену, которое помогает цепи устанавливаться и перемещаться по звездочке, является еще одним важным аспектом, который необходимо смоделировать для получения правильной динамики.
Точно так же вращение звена цепи по отношению к соседнему звену, которое помогает цепи устанавливаться и перемещаться по звездочке, является еще одним важным аспектом, который необходимо смоделировать для получения правильной динамики.
В принципе, вы можете настроить систему цепного привода, используя различные функции, доступные в модуле «Динамика многотельных систем» — дополнении к COMSOL Multiphysics. Однако ручная настройка реалистичной геометрии цепного привода и соответствующих физических характеристик для каждого компонента системы — довольно длительный и подверженный ошибкам процесс. Чтобы упростить эти шаги и быстро смоделировать цепной привод, COMSOL Multiphysics представил новую функциональность в версии 5.5.
Использование цепного привода , доступной в интерфейсе Multibody Dynamics , вы можете легко сгенерировать настройку модели цепного привода с несколькими добавленными физическими функциями одним нажатием кнопки. Для облегчения настройки модели в версии 5. 5 был представлен набор встроенных геометрических деталей, которые можно использовать для построения параметрической геометрии сборки цепной звездочки.
5 был представлен набор встроенных геометрических деталей, которые можно использовать для построения параметрической геометрии сборки цепной звездочки.
В первой части этой серии блогов вы узнаете о создании пользовательских геометрий цепного привода с использованием встроенных геометрических деталей в библиотеке деталей. Вторая часть этой серии блогов будет посвящена тому, как 9Функция 0010 Chain Drive использует геометрию в качестве входных данных и автоматически создает различные физические характеристики, необходимые для анализа.
Построение геометрии роликовой цепи в COMSOL Multiphysics®
Для точного моделирования динамики цепного привода необходимо иметь реалистичную геометрию системы. Из-за большого количества компонентов и сложности их компоновки построение геометрии узла цепной звездочки для большинства практических случаев является нетривиальной задачей.
Если у вас уже есть геометрия цепного привода, созданная с помощью COMSOL Multiphysics или любой другой программы САПР, вы можете импортировать ее в COMSOL Multiphysics и перейти к последующим этапам анализа.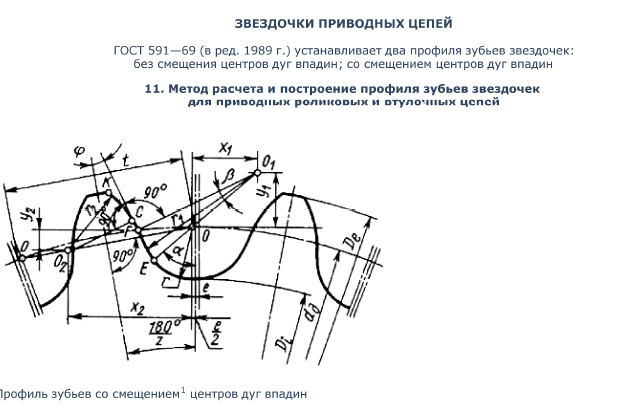 Однако главный недостаток импортированных геометрий заключается в том, что их нельзя модифицировать «на лету» во время моделирования. Следовательно, если вы хотите провести параметрическое исследование, изменяя некоторые параметры геометрии (такие как шаг цепи, ширина, количество звеньев цепи или количество зубьев звездочки), импортированные геометрии могут быть не лучшим выбором. Это требует использования моделей параметрической геометрии, где можно настроить набор входных параметров для изменения формы и размера геометрии системы.
Однако главный недостаток импортированных геометрий заключается в том, что их нельзя модифицировать «на лету» во время моделирования. Следовательно, если вы хотите провести параметрическое исследование, изменяя некоторые параметры геометрии (такие как шаг цепи, ширина, количество звеньев цепи или количество зубьев звездочки), импортированные геометрии могут быть не лучшим выбором. Это требует использования моделей параметрической геометрии, где можно настроить набор входных параметров для изменения формы и размера геометрии системы.
Начиная с версии 5.5, COMSOL Multiphysics предоставляет простой способ создания параметрических геометрических моделей роликовой цепи, звездочки и звездочек роликовых цепей в сборе с использованием встроенных деталей в библиотеке деталей. Благодаря обширному набору входных параметров, доступных для настройки формы и размера цепи, звездочки и цепных звездочек в сборе, вы можете быстро создавать собственные геометрии цепного привода в 2D или 3D. Благодаря множеству встроенных возможностей выбора, доступных для различных доменов и границ, вы можете без особых усилий настраивать различные физические и граничные условия для этих геометрий. Еще одним преимуществом геометрии, созданной из встроенных деталей, является то, что при необходимости эту геометрию также можно экспортировать в формат САПР для последующего использования в программе САПР.
Еще одним преимуществом геометрии, созданной из встроенных деталей, является то, что при необходимости эту геометрию также можно экспортировать в формат САПР для последующего использования в программе САПР.
Компоненты узла звездочки роликовой цепи
Прежде чем научиться использовать встроенные детали для построения геометрии, важно знать различные компоненты геометрии цепного привода и то, как они собираются в систему. В следующем разделе обсуждаются детали роликовой цепи, звездочки и сборки роликовой цепи и звездочки.
Роликовая цепь
Роликовая цепь представляет собой набор звеньев, соединенных шарнирными соединениями. Как показано на рисунке ниже, типичная роликовая цепь в 2D имеет два типа соединительных пластин:
- Роликовые плиты
- Штифтовые пластины
Соединение между штифтами сконструировано таким образом, что относительное вращение между ними не ограничено. Часто между пластинами роликов и пластинами штифтов также присутствуют эластичные втулки.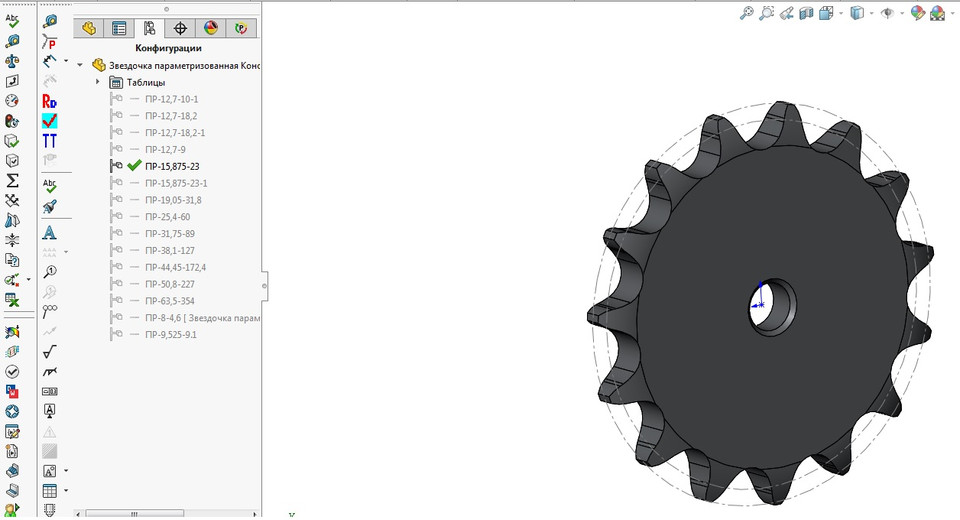
Компоненты роликовой цепи в 2D.
Для трехмерной роликовой цепи составными компонентами являются трехмерные соединительные пластины. Здесь пластина ролика состоит из двух полых цилиндров, соединенных двумя боковыми пластинами. Точно так же штифтовая пластина представляет собой соединение двух сплошных цилиндров, соединенных двумя боковыми пластинами. Цепь образуется путем вставки сплошных штифтовых пластин в полые цилиндрические ножки соседних роликовых пластин, образуя соединение с прессовой посадкой. Этот тип соединения допускает относительное вращение между звеньями, тем самым способствуя передаче движения от одной части системы к другой части. Опционально могут быть включены эластичные втулки между роликом и штифтовой пластиной.
Покомпонентное изображение узла роликовой цепи в 3D.
Звездочка
Для 2D-моделирования звездочка представляет собой круглый объект с несколькими зубьями, в котором ролики цепи непрерывно входят в зацепление и расцепляются во время движения.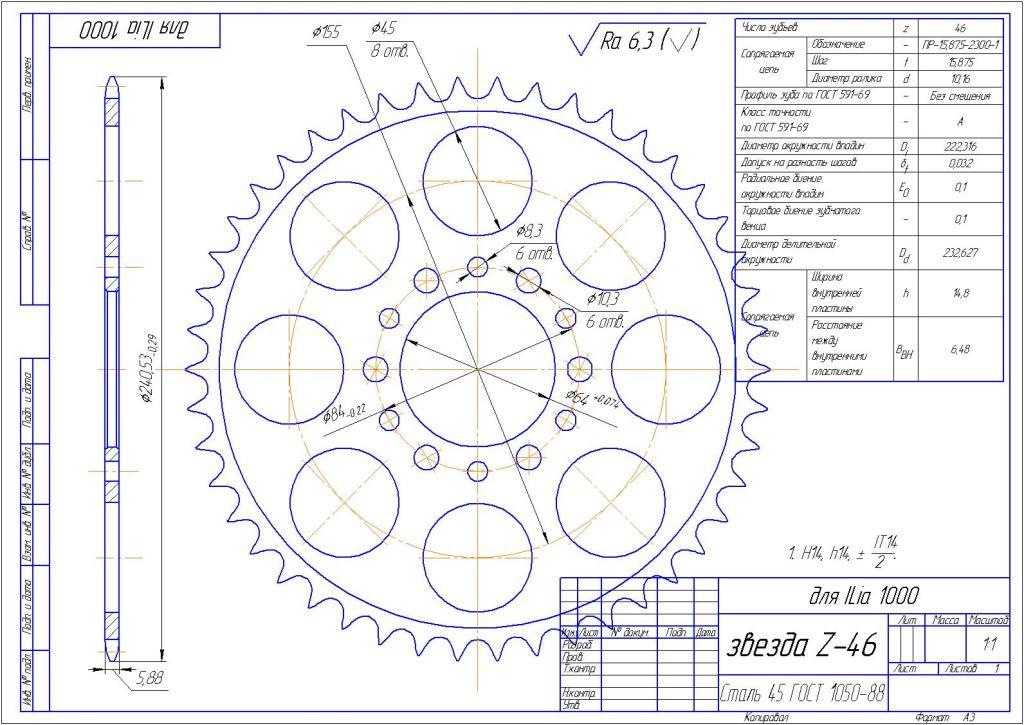 При желании можно создать отверстие, которое помогает при монтаже системы на внешние компоненты, такие как валы. В 3D вы также можете создать ступицу как на верхней, так и на нижней стороне звездочки.
При желании можно создать отверстие, которое помогает при монтаже системы на внешние компоненты, такие как валы. В 3D вы также можете создать ступицу как на верхней, так и на нижней стороне звездочки.
Геометрия звездочек в 2D и 3D.
Звездочка роликовой цепи в сборе
Не всегда нужно использовать вместе элементы геометрии цепи и звездочки. Для некоторых конкретных целей моделирования вы даже можете независимо добавлять в модель детали роликовой цепи или звездочки и комбинировать их с другими компонентами для создания сложной геометрии модели. С другой стороны, если вас интересует моделирование динамики цепного привода, вам не нужно отдельно добавлять и комбинировать части цепи; вместо этого есть третья встроенная часть узла звездочки роликовой цепи, доступная как в 2D, так и в 3D. Как показано на рисунке ниже, в сборочной части звездочки роликовой цепи детали геометрии ролика и звездочки используются для создания геометрии системы с двумя звездочками, соединенными замкнутым контуром звеньев.
Звездочка роликовой цепи в сборе в 2D и 3D.
Добавление элементов цепной геометрии из библиотеки элементов в COMSOL Multiphysics®
Библиотека элементов в COMSOL Multiphysics содержит различные геометрические элементы, полезные для различных приложений, сгруппированные по разным разделам. Роликовая цепь и соответствующие геометрические детали доступны в разделе Multibody Dynamics Module библиотеки деталей. Чтобы открыть окно библиотеки деталей , как показано на рисунке ниже, щелкните правой кнопкой мыши значок Геометрия в модели и выберите Библиотеки деталей в подменю Детали .
Чтобы добавить деталь в модель, нажмите кнопку Добавить в геометрию , которая добавляет выбранную деталь в геометрию модели в качестве экземпляра детали, который можно использовать для построения параметрической геометрии. Раздел Input Parameters в окне Settings экземпляра Part показывает список параметров, используемых для построения геометрии детали. Вы можете изменить значения по умолчанию различных параметров, чтобы построить геометрию вашей системы цепного привода. Есть также варианты для ввода положения и ориентации детали.
Вы можете изменить значения по умолчанию различных параметров, чтобы построить геометрию вашей системы цепного привода. Есть также варианты для ввода положения и ориентации детали.
Папки Роликовые цепи в модуле динамики многотельных систем содержат различные геометрические детали для 2D- и 3D-геометрий. Здесь для добавления к геометрии выбрана деталь roll_chain_sprocket_assembly в 3D.
Узел звездочки роликовой цепи добавлен как экземпляр детали в последовательность геометрии. Все параметры этой детали перечислены в разделе «Входные параметры ».
В следующем разделе мы подробно рассмотрим различные входные параметры и то, как их можно настроить для создания различных типов роликовых цепей в сборе.
Настройка параметров геометрии
Роликовые цепи и звездочки, имеющиеся в продаже, обычно обозначаются набором цифр, указывающих размеры различных составляющих компонентов. Эти номера указаны на компонентах или поставляются вместе с изделием.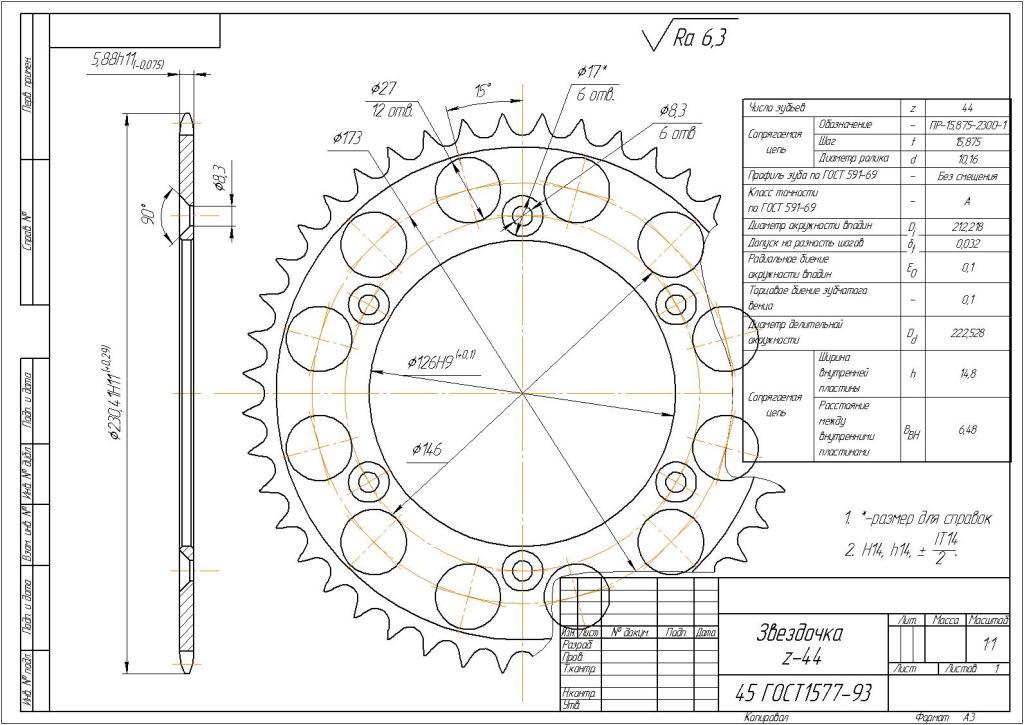 В случае, если информация недоступна, вы также можете измерить и узнать размеры вашей цепи и звездочек. Если вы знаете основные геометрические размеры, их очень легко воспроизвести с помощью библиотеки деталей в COMSOL Multiphysics. Используя параметрическую природу частей геометрии, вы можете построить геометрию цепного привода, просто введя минимальный набор параметров.
В случае, если информация недоступна, вы также можете измерить и узнать размеры вашей цепи и звездочек. Если вы знаете основные геометрические размеры, их очень легко воспроизвести с помощью библиотеки деталей в COMSOL Multiphysics. Используя параметрическую природу частей геометрии, вы можете построить геометрию цепного привода, просто введя минимальный набор параметров.
Встроенные детали также обеспечивают гибкость при включении определенных геометрических компонентов. Например, если ваша система не включает такие элементы, как втулки между звеньями, отверстие в звездочке или ступицу на верхней и нижней сторонах звездочки, вы можете легко исключить их из окончательной геометрии, просто установив соответствующий параметр равен нулю.
Ниже мы видим некоторые важные параметры, доступные для деталей, связанных с роликовой цепью, и то, как их можно настроить для создания геометрии цепного привода.
Параметры роликовой цепи
Среди всех параметров, необходимых для создания геометрии роликовой цепи и звездочки, шаг является наиболее важным.
Для роликовых цепей доступны следующие важные параметры:
- Шаг (p)
- Количество звеньев цепи (n)
- Отношение ширины к шагу звездочки (W)
- Отношение диаметра ролика к шагу (Dr)
- Отношение диаметра пальца к шагу (Dp)
- Минимальное отношение ширины соединительной пластины к диаметру ролика (Wl)
Блок роликовой цепи с входными параметрами.
Путем настройки вышеуказанных параметров можно изменить форму и размер звеньев цепи. Например, если вы хотите масштабировать геометрию цепи, этого можно быстро добиться, изменив значения шага.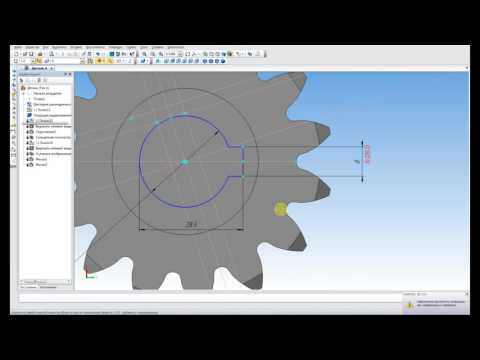
Слева: три роликовые цепи с разным шагом и одинаковым соотношением диаметров звеньев. Справа: три роликовые цепи с одинаковым шагом и разным соотношением диаметров звеньев.
Как вы могли заметить, боковые пластины одних роликовых цепей имеют прямую форму, а у других цепей изогнутую. Изменяя параметр отношения минимальной ширины соединительной пластины к диаметру ролика (Wl), в COMSOL Multiphysics можно создавать как прямые, так и криволинейные геометрические формы пластин.
Три роликовые цепи с разной формой боковых пластин. Слева направо: параметр минимального отношения ширины соединительной пластины к диаметру ролика (Wl) установлен равным 0,92, 0,6 и 0,25 соответственно; для изготовления роликовых цепей прямой или изогнутой формы. Во всех случаях необязательный параметр Db устанавливается равным нулю, если между звеньями нет втулок.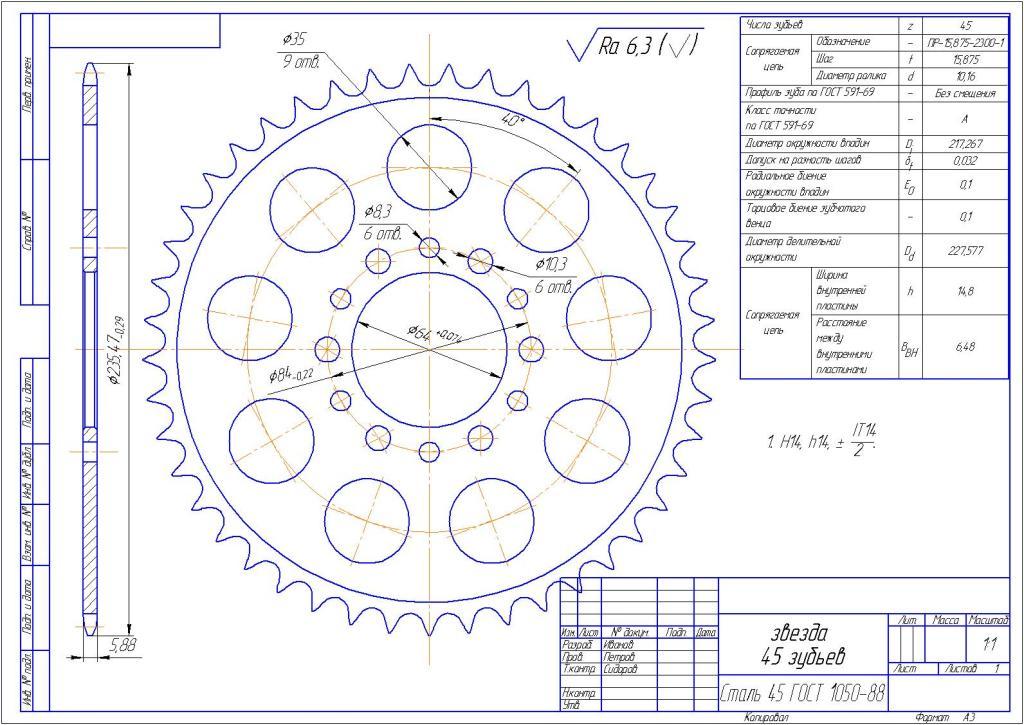
Параметры звездочки
Для правильной работы цепного привода звездочки и цепь должны быть совместимы друг с другом. Для этого расстояние между центрами соседних зубьев звездочки сохраняется таким же, как шаг цепи. Точно так же каждый зуб звездочки сконструирован таким образом, что он правильно подходит к роликам цепи. Кроме того, максимальная ширина звездочки ограничена расстоянием в свету между пластинами внутренних звеньев. Если хотите, есть параметр, позволяющий включить некоторый зазор между звездочкой и цепными пластинами.
Несколько важных параметров звездочек включают:
- Шаг (p)
- Количество зубьев (N)
- Отношение ширины к шагу звездочки (Wsp)
- Отношение диаметра ролика к шагу (Dr)
- Отношение диаметра отверстия к делительному диаметру (Dbr)
- Отношение диаметра ступицы к делительному диаметру (Dh)
- Отношение ширины ступицы к шагу вверху (Whu) и внизу (Whd)
Звездочка с входными параметрами в 2D и 3D.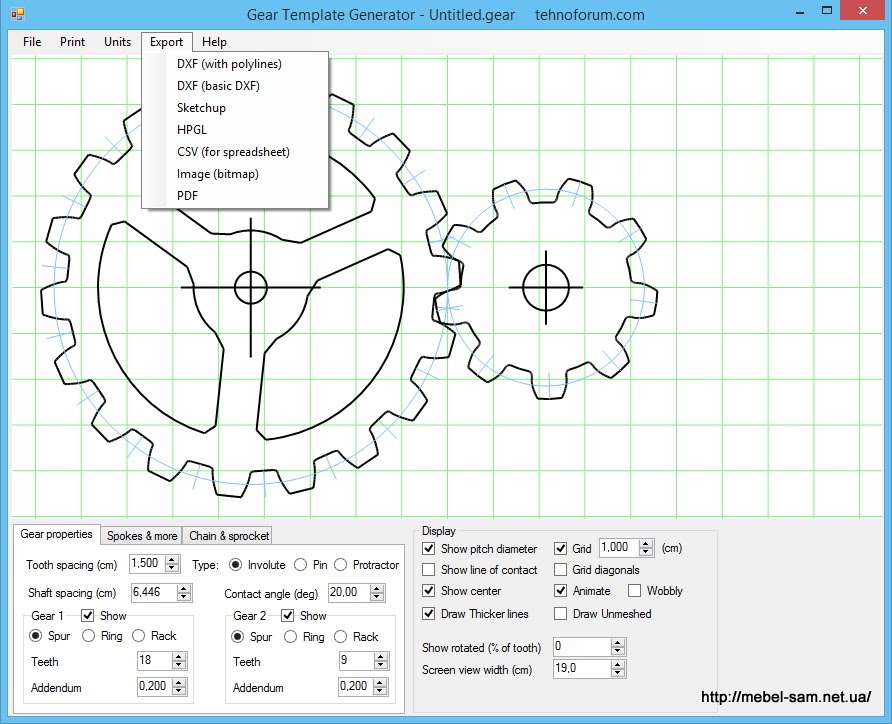
Звездочка в основном идентифицируется по шагу и количеству зубьев. Как показано на рисунке ниже, вы можете создавать различные формы звездочек, изменяя комбинацию шага и количества зубьев.
Три звездочки одинакового размера с разным количеством зубьев.
Для облегчения монтажа на валах геометрия звездочки по умолчанию содержит отверстие и ступицу на верхней и нижней сторонах. Как показано на рисунке ниже, вы также можете дополнительно исключить их из геометрии, установив значение соответствующего параметра равным нулю.
Геометрия звездочки с различными дополнительными функциями. Слева: геометрия звездочки по умолчанию с отверстием и ступицей; Посередине: без ступицы сверху и снизу; Справа: без ступицы и отверстия.
Параметры узла звездочки роликовой цепи
В дополнение к вышеупомянутым параметрам, необходимым для установки индивидуальных свойств цепи и звездочек, узел звездочки роликовой цепи имеет несколько дополнительных параметров, в основном для управления свойствами узла. Параметры сборки включают:
Параметры сборки включают:
- Межцентровое расстояние звездочки (cd)
- Количество звеньев цепи (Nc)
- Количество зубьев первой звездочки (n1)
- Количество зубьев второй звездочки (n2)
- Координаты центра первой звездочки (x0, y0, z0)
- Направление оси звездочки (esx, esy, esz)
- Зазор звездочки (clrsp)
Звездочка роликовой цепи в сборе с входными параметрами в 3D.
Варианты деталей для сборки звездочек роликовой цепи
При создании цепного привода вы можете использовать различные типы ограничений. Представьте себе случай, когда вы хотите передать движение между двумя звездочками, установленными на двух фиксированных валах. Для таких задач точное количество звеньев цепи может быть неизвестно; скорее, он рассчитывается как количество, необходимое для покрытия звездочек заданного размера и положения. Во втором сценарии вы хотите соединить две звездочки с помощью цепи фиксированной длины.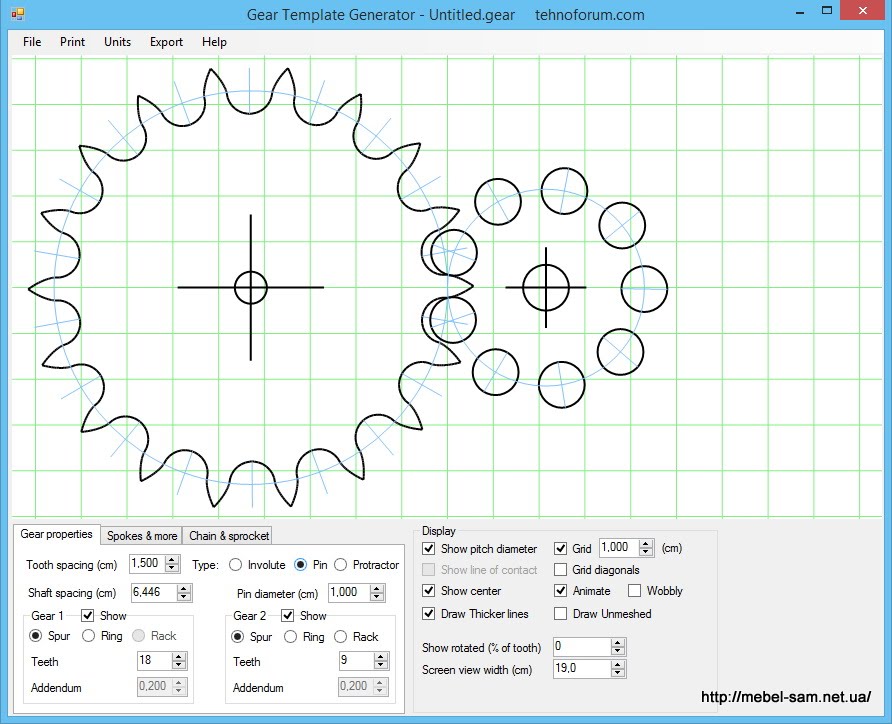 Здесь положения звездочки регулируются в соответствии с заданной длиной цепи. Используя различные варианты сборочных деталей роликовой звездочки, вы можете быстро построить геометрические модели для обоих случаев в программном обеспечении COMSOL®.
Здесь положения звездочки регулируются в соответствии с заданной длиной цепи. Используя различные варианты сборочных деталей роликовой звездочки, вы можете быстро построить геометрические модели для обоих случаев в программном обеспечении COMSOL®.
Два варианта деталей, доступных для сборки звездочки роликовой цепи:
- Укажите расстояние между центрами звездочки
- Укажите количество звеньев цепи
При добавлении детали сборки роликовой звездочки в геометрию модели появится окно для выбора варианта детали. В зависимости от ваших входных данных, вы можете выбрать один из них и добавить его к геометрии.
Два варианта сборки звездочки роликовой цепи.
Все остальные входные параметры, кроме одного, одинаковы для обоих вариантов. Если вы используете вариант Задать межосевое расстояние звездочки , вам необходимо ввести параметр Расстояние между центрами звездочки (cd) . На основе этого COMSOL Multiphysics строит геометрию, вычисляя минимальное четное количество звеньев, необходимых для охвата двух звездочек, расположенных на заданном расстоянии.
Обратите внимание, что в обоих случаях расчет расстояния между центрами звездочки и количества звеньев цепи основан на нелинейных уравнениях. Следовательно, существует вероятность того, что звенья не будут плотно охватывать звездочки. Если вы хотите внести незначительные изменения в межосевое расстояние между звездочками, установите параметр коррекции межосевого расстояния (ccorr) равным единице и соответствующим образом настройте значение коэффициента коррекции межосевого расстояния (cdelta).
Выбор, предоставляемый цепными частями
Мы видели, как создавать геометрию различных компонентов цепного привода из встроенных деталей. Как упоминалось ранее, эти параметрические геометрические модели используются для настройки физической структуры, необходимой для анализа системы цепного привода.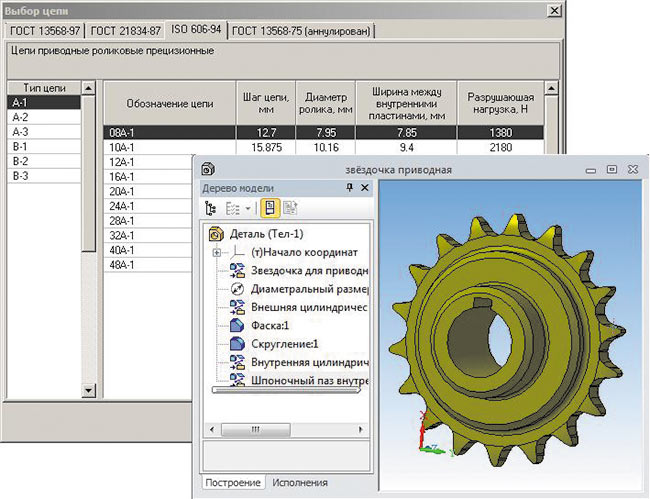 Чтобы облегчить это, во все части, связанные с роликовыми цепями, добавлен набор элементов выбора. Используя эти варианты выбора, вы можете легко назначать разные материалы разным компонентам, устанавливать различные граничные условия и изменять настройку физики или этапы постобработки.
Чтобы облегчить это, во все части, связанные с роликовыми цепями, добавлен набор элементов выбора. Используя эти варианты выбора, вы можете легко назначать разные материалы разным компонентам, устанавливать различные граничные условия и изменять настройку физики или этапы постобработки.
Когда вы добавляете геометрическую часть в геометрию модели, все доступные варианты выбора перечислены в соответствующих разделах, таких как Object Selections , Domain Selections или Boundary Selections в окне Settings окна Экземпляр детали . В деталях звездочки роликовой цепи для роликовых пластин, штифтовых пластин и объектов звездочки определены различные выборки объектов и доменов. Точно так же определяются различные выборки границ для роликовых пластин, штифтовых пластин и звездочек. На рисунке ниже показаны различные предопределенные варианты выбора, доступные для сборки звездочки роликовой цепи. (Во второй части этой серии блогов вы подробно увидите, как эти предустановленные параметры играют решающую роль в настройке системы цепного привода).
Чтобы добавить любой из предопределенных вариантов выбора в модель, используйте флажки под Сохранить или Физика . Установив флажки под Keep , вы можете сохранить соответствующие выборки в геометрии компонента. Чтобы сделать выбор доступным при определении материалов и назначении физики, установите флажки под Physics . Установите флажок Сохранить неучаствующие выборки , чтобы отключить столбец Сохранить и сохранить все выборки, которые не участвуют в кумулятивной выборке.
Различные выборы областей и границ, определенные в части звездочки роликовой цепи. Выделен выбор домена, а именно Links , состоящий из всех звеньев цепи.
Проверка построения реалистичной геометрии
Как упоминалось выше, для построения деталей геометрии цепи и звездочки используется несколько параметров. При вводе этих параметров вы должны быть осторожны, чтобы выбрать разумные значения в пределах допустимого диапазона.
Во всех деталях добавлена общая проверка на положительные значения основных геометрических параметров. Ниже приведены несколько дополнительных важных проверок для различных частей:
- Роликовая цепь
- Диаметр ролика должен быть меньше шага
- Диаметр штифта должен быть меньше диаметра ролика
- Диаметр втулки должен быть меньше диаметра ролика и больше диаметра штифта
- Звездочка
- Количество зубьев должно быть положительным целым числом
- Диаметр отверстия должен быть меньше диаметра корня
- Звездочка роликовой цепи в сборе
- Межцентровое расстояние звездочки должно быть больше суммы радиусов звездочки
- Количество зубьев первой звездочки должно быть больше или равно числу зубьев второй звездочки
Если вы столкнулись с одним из приведенных выше сообщений об ошибке, попробуйте соответствующим образом изменить несколько параметров и перестроить геометрию.
В следующем сообщении блога из серии «Моделирование цепного привода» мы покажем вам, как настроить цепной привод с помощью модуля «Динамика многотельных систем». Следите за обновлениями!
Следующие шаги
Просмотрите эти дополнительные ресурсы:
- Узнайте о построении геометрии модели с помощью геометрических частей в COMSOL Multiphysics: Использование геометрических частей и библиотек деталей в COMSOL Multiphysics®
- Прочтите эту серию блогов о моделировании зубчатых колес
- Ознакомьтесь с обновленными функциями и возможностями модуля Multibody Dynamics, начиная с COMSOL Multiphysics версии 5.5, с помощью выпуска Highlights .
Примечание редактора: мы опубликовали следующий пост в этой серии блогов. Читайте здесь: «Как смоделировать цепной привод в COMSOL Multiphysics 9».0371® ”.
Обзор продуктов | Шнайдер Электрик
 se.com/ww/en/work/products/residential-and-small-business/”>
se.com/ww/en/work/products/residential-and-small-business/”>Жилой сектор и малый бизнес
Автоматизация и управление зданием
Низковольтные изделия и системы
Аккумулятор солнечной энергии и энергии
 se.com/ww/en/work/products/access-to-energy/”>
se.com/ww/en/work/products/access-to-energy/”>Доступ к энергии
Распределение среднего напряжения и автоматизация сети
Критическая мощность, охлаждение и стойки
Промышленная автоматизация и управление
Верхние диапазоны
Высшие диапазоны
Высшие диапазоны
Высшие диапазоны
Высшие диапазоны
Высшие диапазоны
Высшие диапазоны
Высшие диапазоны
Диапазоны: 77
Диапазоны: 58
Диапазоны: 32
Ассортимент: 24
Откройте для себя широкий выбор кнопок, переключателей и сигнальных ламп для большинства промышленных применений.
