Пружина жесткостью: Купить Пружина жесткостью 40 Н/м
alexxlab | 24.07.1988 | 0 | Разное
Помощь студентам в учёбе от Людмилы Фирмаль
Здравствуйте!
Я, Людмила Анатольевна Фирмаль, бывший преподаватель математического факультета Дальневосточного государственного физико-технического института со стажем работы более 17 лет. На данный момент занимаюсь онлайн обучением и помощью по любыми предметам. У меня своя команда грамотных, сильных бывших преподавателей ВУЗов. Мы справимся с любой поставленной перед нами работой технического и гуманитарного плана. И не важно: она по объёму на две формулы или огромная сложно структурированная на 125 страниц! Нам по силам всё, поэтому не стесняйтесь, присылайте.
Срок выполнения разный: возможно онлайн (сразу пишите и сразу помогаю), а если у Вас что-то сложное – то от двух до пяти дней.
Для качественного оформления работы обязательно нужны методические указания и, желательно, лекции. Также я провожу онлайн-занятия и занятия в аудитории для студентов, чтобы дать им более качественные знания.
Моё видео:
Вам нужно написать сообщение в Telegram . После этого я оценю Ваш заказ и укажу срок выполнения. Если условия Вас устроят, Вы оплатите, и преподаватель, который ответственен за заказ, начнёт выполнение и в согласованный срок или, возможно, раньше срока Вы получите файл заказа в личные сообщения.
Сколько может стоить заказ?Стоимость заказа зависит от задания и требований Вашего учебного заведения. На цену влияют: сложность, количество заданий и срок выполнения. Поэтому для оценки стоимости заказа максимально качественно сфотографируйте или пришлите файл задания, при необходимости загружайте поясняющие фотографии лекций, файлы методичек, указывайте свой вариант.
Какой срок выполнения заказа?Минимальный срок выполнения заказа составляет 2-4 дня, но помните, срочные задания оцениваются дороже.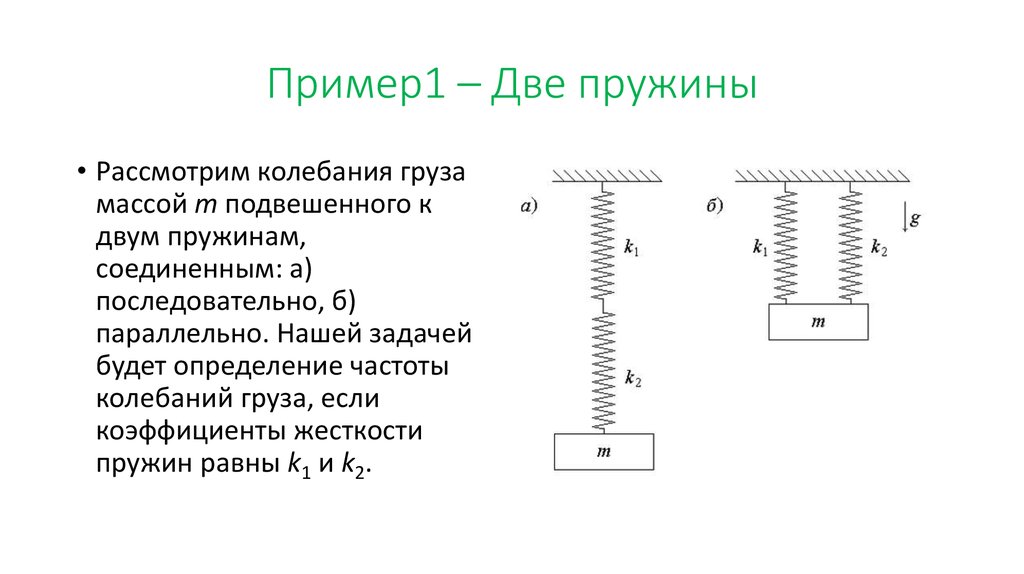
Сначала пришлите задание, я оценю, после вышлю Вам форму оплаты, в которой можно оплатить с баланса мобильного телефона, картой Visa и MasterCard, apple pay, google pay.
Какие гарантии и вы исправляете ошибки?В течение 1 года с момента получения Вами заказа действует гарантия. В течении 1 года я и моя команда исправим любые ошибки в заказе.
Качественно сфотографируйте задание, или если у вас файлы, то прикрепите методички, лекции, примеры решения, и в сообщении напишите дополнительные пояснения, для того, чтобы я сразу поняла, что требуется и не уточняла у вас. Присланное качественное задание моментально изучается и оценивается.
Теперь напишите мне в Telegram или почту и прикрепите задания, методички и лекции с примерами решения, и укажите сроки выполнения. Я и моя команда изучим внимательно задание и сообщим цену.
Если цена Вас устроит, то я вышлю Вам форму оплаты, в которой можно оплатить с баланса мобильного телефона, картой Visa и MasterCard, apple pay, google pay.
Мы приступим к выполнению, соблюдая указанные сроки и требования. 80% заказов сдаются раньше срока.
После выполнения отправлю Вам заказ в чат, если у Вас будут вопросы по заказу – подробно объясню. Гарантия 1 год. В течении 1 года я и моя команда исправим любые ошибки в заказе.
Можете смело обращаться к нам, мы вас не подведем. Ошибки бывают у всех, мы готовы дорабатывать бесплатно и в сжатые сроки, а если у вас появятся вопросы, готовы на них ответить.
Ошибки бывают у всех, мы готовы дорабатывать бесплатно и в сжатые сроки, а если у вас появятся вопросы, готовы на них ответить.
В заключение хочу сказать: если Вы выберете меня для помощи на учебно-образовательном пути, у вас останутся только приятные впечатления от работы и от полученного результата!
Жду ваших заказов!
С уважением
Политика конфиденциальности
Пружины. Полный контроль
Пружины
Все знают, что это такое, но не все знают, что существуют разные типы пружин. Для начала определим, что такое жесткость пружины и предварительное поджатие. Коэффициент жесткости пружины измеряется в килограммах на миллиметр или в фунтах на дюйм. Чем он больше, тем пружина жестче. Найти коэффициент довольно просто, нужно измерить длину пружины без нагрузки и под нагрузкой. Если провести эти измерения с разными грузами, то можно построить график зависимости силы сжатия от перемещения. В математической точки зрения, коэффициент жесткости является частным от деления приложенной силы на перемещение пружины, или тангенсом угла наклона графика к оси абсцисс.
В простейшем случае жесткость пружины не меняется при сжатии, поэтому график представляет собой прямую линию, такие пружины применяются в кольцевых мотогонках. Двойные или прогрессивные пружины меняют свою жесткость при изменении сжатия.
При установке в подвеску пружина чуть–чуть сжимается. Это называется предварительным поджатием пружины, оно измеряется в миллиметрах или дюймах. Все пружины в мотоциклетных подвесках предварительно поджаты. Если подвеска не имеет регулировки предварительного поджатия, все равно пружина в ней сжата при установке. Даже если же такая регулировка есть и она выкручена до упора, все равно пружина остается поджатой. Например, если величина предварительного поджатия может регулироваться в пределах 15 мм, это значит, что поджатие меняется с 20 до 35 мм. Если внешней регулировки нет, поджатие можно изменить с помощью специальных проставок.
Из-за предварительного поджатия сила сжатия существует даже в полностью вытянутой вилке.
Слишком мягкие пружины приводят к большой вертикальной раскачке байка. Слишком жесткие приводят к сильной тряске. Оба варианта ухудшают поведение мотоцикла на дороге.
С помощью нехитрых измерений и рисунка 5 вы сможете понять, как настроены пружины вашего байка. Большинство мотоциклов имеют слишком мягкую настройку даже для уличного вождения. Гонщики, как правило, используют более жесткие пружины и меньшее предварительное поджатие. При настройке пружин руководствуйтесь собственными предпочтениями и не пытайтесь угнаться за гонщиками, иначе у вас от тряски повыпадают зубы.
В заключение хочу сказать, что величина просадки в статике для данной системы мотоцикл–водитель определяется жесткостью пружин и величиной предварительного поджатия. Поскольку амортизаторы вступают в действие только в движении, никакие их настройки не влияют на просадку.
Пара слов о вилках с воздушной подкачкой и о масле в вилке. Подкачка очень сильно влияет на жесткость вилки и на просадку. Дело в том, что воздух работает как проставка, он увеличивает предварительное поджатие, но почти не влияет на жесткость вилки. Такую настройку можно рекомендовать владельцам туреров, с ее помощью можно увеличить грузоподъемность мотоцикла, например, для перевозки пассажира. Изменение же уровня масла в вилке влияет на жесткость вилки, но только на предельных перемещениях, в начальной половине рабочего диапазона это влияние практически незаметно. Поэтому уровень масла в вилке также не влияет на просадку.
Донки, «макушатницы», «пружины»
Донки, «макушатницы», «пружины»
Классик нашей рыболовной литературы Л. П. Сабанеев отрицал возможность ловли крупного карпа на донки: «Собственно говоря, существует только один метод (ужения карпа – А. Ш.) – ужение на длинное удилище с поплавком». Непригодность донок
П. Сабанеев отрицал возможность ловли крупного карпа на донки: «Собственно говоря, существует только один метод (ужения карпа – А. Ш.) – ужение на длинное удилище с поплавком». Непригодность донок
12. Разворот отверстия для соска боевой пружины
12. Разворот отверстия для соска боевой пружины Боевая пружина должна прочно удерживаться своим соском в рамке и сниматься с рамки с некоторым усилием.(I) При развороте отверстия для соска боевой пружины отделить от рамки правую щеку, положить рамку плоскостью
1. Изгиб пружины шомпола.
1. Изгиб пружины шомпола. (I) Проверить работу пружины. Пружина шомпола должна своим зубом давить на шомпол и удерживать его от свободного перемещения в шомпольной трубке При наличии изгиба зажать один конец пружины в тисках и вручную выправить пружину.Если после правки
2.
 Износ или излом зуба пружины шомпола.
Износ или излом зуба пружины шомпола.2. Износ или излом зуба пружины шомпола. (I) Осмотреть зуб пружины шомпола и проверить, упирается ли он в дно продольного паза шомпола.При наличии износа или излома зуба пружины заменить
2. Изгиб пружины шомпола.
2. Изгиб пружины шомпола. См. раздел “Шомпол свободно перемещается в шомпольной трубке”, п.
3. Износ или излом зуба пружины шомпола.
Не совмещение зуба пружины шомпола с поперечным пазом шомпола.
Не совмещение зуба пружины шомпола с поперечным пазом шомпола.
(I) Определить, какая из граней зуба пружины шомпола препятствует закреплению шомпола в шомпольной трубке. Для этого отделить барабан от рамки, прочистить канал оси барабана, вставить ось барабана в рамку
Для этого отделить барабан от рамки, прочистить канал оси барабана, вставить ось барабана в рамку
2. Осадка боевой пружины.
2. Осадка боевой пружины. (I) Осевшую боевую пружину заменить. После постановки новой пружины проверить работу ударно-спускового
1. Ослабление боевой пружины.
1. Ослабление боевой пружины. (I) При наличии ослабления заменить боевую пружину. После постановки новой пружины проверить работу ударно-спускового
1. Осадка или излом пружины рычага (шатуна).
1. Осадка или излом пружины рычага (шатуна). (I) Заменить пружину рычага
1. Излом или осадка пружины барабана.
1. Излом или осадка пружины барабана. Исправная пружина барабана должна иметь семь полных витков и высоту в свободном состоянии не менее 27 мм,(I) Поломанную или осевшую пружину
Исправная пружина барабана должна иметь семь полных витков и высоту в свободном состоянии не менее 27 мм,(I) Поломанную или осевшую пружину
1. Изгиб или ослабление пружины дверцы.
1. Изгиб или ослабление пружины дверцы. (I) При наличии изгиба зажать один конец пружины в тисках и выправить ее.При наличии ослабления заменить
3. Упирание нижнего пера боевой пружины в спусковую скобу (23 на черт. 1).
3. Упирание нижнего пера боевой пружины в спусковую скобу (23 на черт. 1). Упирание нижнего пера боевой пружины в спусковую скобу при невзведенном курке не допускается.При невзведенном курке между нижним пером боевой пружины и спусковой скобой должен быть видимый
Формула жесткости пружины через массу и частоту
О: Маятники совершают колебательные движения в противоположные стороны, т. е. в противофазе.
е. в противофазе.
Вывод: мы убедились в том, что одни и те же системы маятников могут совершать колебательные движения и в фазе, и в противофазе.
Рекомендации: Для этого эксперимента штатив нужно брать достаточно длинным и пружины достаточно жесткими.
Опыт 3. Зависимость частоты колебаний от жесткости пружины.
Цель: найти зависимость между жесткостью пружины и частотой собственных колебаний пружинного маятника.
Оборудование: штатив универсальный, пружина, груз, линейка с делениями.
Ход работы: Соберем установку, изображенную на рисунке. Подвешиваем груз массой 500 г. Вы видите, что пружина растянулась. Давайте определим жесткость пружины по формуле.
В: Напишите расчетную формулу для жесткости.
О: F=kx, где х – удлинение пружины, F – сила тяжести груза.
В: Какую формулу мы можем использовать при нахождении периода колебаний пружинного маятника?
О: . Верно.
Рассчитаем период
Далее давайте экспериментально проверим формулу. Посчитаем время, за которое маятник совершит 10 полных колебаний. Засекли – 12 с.
T = t/n, t – время, n – число колебаний.
Вывод: из полученных результатов видно, что между жесткостью пружины и частотой колебаний маятника существует зависимость ν≈.
Опыт: Образование и распространение поперечных и продольных волн.
Цель: убедить учащихся, что скорость распространения волн зависит от характера связи между системами.
Оборудование: стержень с тремя маятниками, резиновая трубка диаметром до 1 см и длиной 4-5 м, резиновый шнур 1-1,5 мм и длиной 50-60 см.
Ход работы: изучение волновых процессов удобно начать с демонстрации колебаний связанных маятников. Для этого к стойке штатива прикрепляют металлический стержень с тремя маятниками. Маятники уравнивают по длине и связывают посередине тонким резиновым шнурком. Отклоним крайний шарик от положения равновесия в плоскости горизонтального стержня. Ребята, обратите внимание на оставшиеся не отклоненными шарики. Отпускаем шарик.
Маятники уравнивают по длине и связывают посередине тонким резиновым шнурком. Отклоним крайний шарик от положения равновесия в плоскости горизонтального стержня. Ребята, обратите внимание на оставшиеся не отклоненными шарики. Отпускаем шарик.
В: Что произойдет с двумя другими шариками?
О: Они тоже начнут колебаться, сначала ближний, затем дальний.
В: Вследствие чего шарики начали колебаться?
О: Шарики были связаны резиновым шнурком и из-за этой связи пришли в движение оставшиеся шарики.
Далее изменим высоту резинового шнура и проведем те же действия, как и в предыдущем опыте. Так же оттягиваем крайний шарик и отпускаем.
В: Что изменилось в этом случае?
О: Опустив резиновый шнур, мы сделали передачу колебаний более быстрой.
Скорость передачи колебаний от одного маятника к другому зависит от связи между маятниками. Чем прочнее связь, тем скорость распространения выше.
Опыт: Волны на поверхности воды.
Цель: продемонстрировать учащимся волны на поверхности воды и показать, что они являются поперечными.
- АлтГТУ 419
- АлтГУ 113
- АмПГУ 296
- АГТУ 266
- БИТТУ 794
- БГТУ «Военмех» 1191
- БГМУ 172
- БГТУ 602
- БГУ 153
- БГУИР 391
- БелГУТ 4908
- БГЭУ 962
- БНТУ 1070
- БТЭУ ПК 689
- БрГУ 179
- ВНТУ 119
- ВГУЭС 426
- ВлГУ 645
- ВМедА 611
- ВолгГТУ 235
- ВНУ им. Даля 166
- ВЗФЭИ 245
- ВятГСХА 101
- ВятГГУ 139
- ВятГУ 559
- ГГДСК 171
- ГомГМК 501
- ГГМУ 1967
- ГГТУ им. Сухого 4467
- ГГУ им. Скорины 1590
- ГМА им. Макарова 300
- ДГПУ 159
- ДальГАУ 279
- ДВГГУ 134
- ДВГМУ 409
- ДВГТУ 936
- ДВГУПС 305
- ДВФУ 949
- ДонГТУ 497
- ДИТМ МНТУ 109
- ИвГМА 488
- ИГХТУ 130
- ИжГТУ 143
- КемГППК 171
- КемГУ 507
- КГМТУ 269
- КировАТ 147
- КГКСЭП 407
- КГТА им. Дегтярева 174
- КнАГТУ 2909
- КрасГАУ 370
- КрасГМУ 630
- КГПУ им.
 Астафьева 133
Астафьева 133 - КГТУ (СФУ) 567
- КГТЭИ (СФУ) 112
- КПК №2 177
- КубГТУ 139
- КубГУ 107
- КузГПА 182
- КузГТУ 789
- МГТУ им. Носова 367
- МГЭУ им. Сахарова 232
- МГЭК 249
- МГПУ 165
- МАИ 144
- МАДИ 151
- МГИУ 1179
- МГОУ 121
- МГСУ 330
- МГУ 273
- МГУКИ 101
- МГУПИ 225
- МГУПС (МИИТ) 636
- МГУТУ 122
- МТУСИ 179
- ХАИ 656
- ТПУ 454
- НИУ МЭИ 641
- НМСУ «Горный» 1701
- ХПИ 1534
- НТУУ «КПИ» 212
- НУК им. Макарова 542
- НВ 777
- НГАВТ 362
- НГАУ 411
- НГАСУ 817
- НГМУ 665
- НГПУ 214
- НГТУ 4610
- НГУ 1992
- НГУЭУ 499
- НИИ 201
- ОмГТУ 301
- ОмГУПС 230
- СПбПК №4 115
- ПГУПС 2489
- ПГПУ им. Короленко 296
- ПНТУ им. Кондратюка 119
- РАНХиГС 186
- РОАТ МИИТ 608
- РТА 243
- РГГМУ 118
- РГПУ им.
 Герцена 124
Герцена 124 - РГППУ 142
- РГСУ 162
- «МАТИ» — РГТУ 121
- РГУНиГ 260
- РЭУ им. Плеханова 122
- РГАТУ им. Соловьёва 219
- РязГМУ 125
- РГРТУ 666
- СамГТУ 130
- СПбГАСУ 318
- ИНЖЭКОН 328
- СПбГИПСР 136
- СПбГЛТУ им. Кирова 227
- СПбГМТУ 143
- СПбГПМУ 147
- СПбГПУ 1598
- СПбГТИ (ТУ) 292
- СПбГТУРП 235
- СПбГУ 582
- ГУАП 524
- СПбГУНиПТ 291
- СПбГУПТД 438
- СПбГУСЭ 226
- СПбГУТ 193
- СПГУТД 151
- СПбГУЭФ 145
- СПбГЭТУ «ЛЭТИ» 380
- ПИМаш 247
- НИУ ИТМО 531
- СГТУ им. Гагарина 114
- СахГУ 278
- СЗТУ 484
- СибАГС 249
- СибГАУ 462
- СибГИУ 1655
- СибГТУ 946
- СГУПС 1513
- СибГУТИ 2083
- СибУПК 377
- СФУ 2423
- СНАУ 567
- СумГУ 768
- ТРТУ 149
- ТОГУ 551
- ТГЭУ 325
- ТГУ (Томск) 276
- ТГПУ 181
- ТулГУ 553
- УкрГАЖТ 234
- УлГТУ 536
- УИПКПРО 123
- УрГПУ 195
- УГТУ-УПИ 758
- УГНТУ 570
- УГТУ 134
- ХГАЭП 138
- ХГАФК 110
- ХНАГХ 407
- ХНУВД 512
- ХНУ им.
 Каразина 305
Каразина 305 - ХНУРЭ 324
- ХНЭУ 495
- ЦПУ 157
- ЧитГУ 220
- ЮУрГУ 306
Полный список ВУЗов
Чтобы распечатать файл, скачайте его (в формате Word).
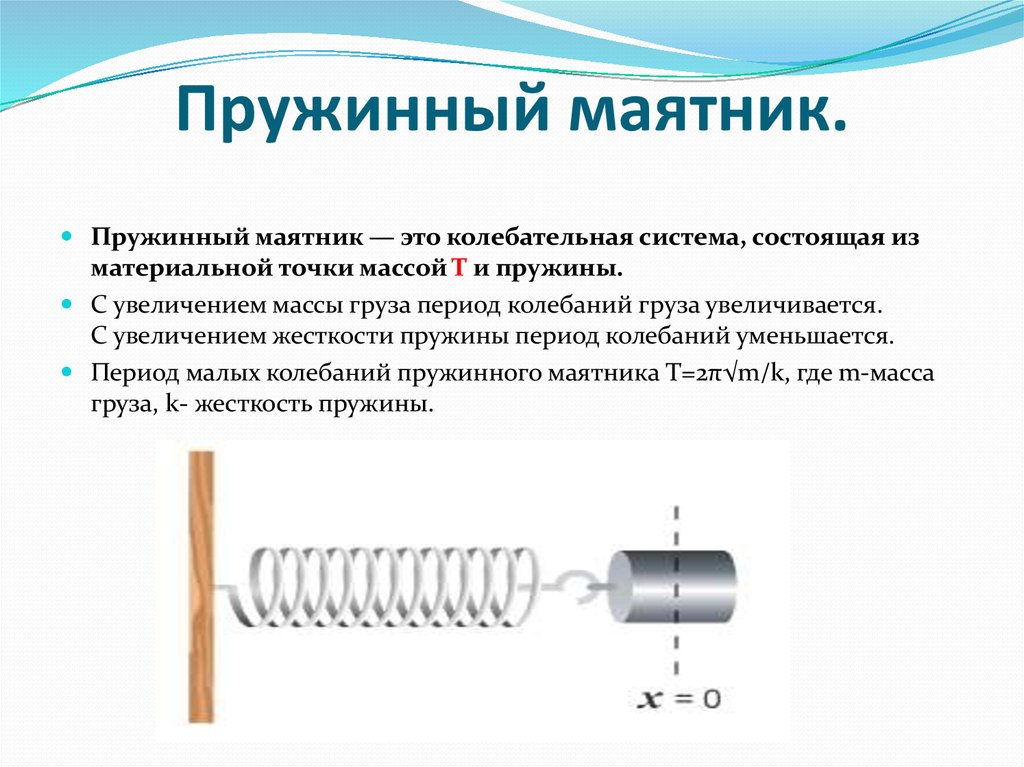
Работа большинства механизмов основана на простейших законах физики и математики. Довольно большое распространение получило понятие пружинного маятника. Подобный механизм получил весьма широкое распространение, так как пружина обеспечивает требуемую функциональность, может быть элементом автоматических устройств. Рассмотрим подробнее подобное устройство, принцип действия и многие другие моменты подробнее.
Определения пружинного маятника
Как ранее было отмечено, пружинный маятник получил весьма широкое распространение. Среди особенностей можно отметить следующее:
- Устройство представлено сочетанием груза и пружины, масса которой может не учитываться. В качестве груза может выступать самый различный объект. При этом на него может оказываться воздействие со стороны внешней силы.
 Распространенным примером можно назвать создание предохранительного клапана, который устанавливается в системе трубопровода. Крепление груза к пружине проводится самым различным образом. При этом используется исключительно классический винтовой вариант исполнения, который получил наиболее широкое распространение. Основные свойства во многом зависят от типа применяемого материала при изготовлении, диаметра витка, правильности центровки и многих других моментов. Крайние витки часто изготавливаются таким образом, чтобы могли воспринимать большую нагрузку при эксплуатации.
Распространенным примером можно назвать создание предохранительного клапана, который устанавливается в системе трубопровода. Крепление груза к пружине проводится самым различным образом. При этом используется исключительно классический винтовой вариант исполнения, который получил наиболее широкое распространение. Основные свойства во многом зависят от типа применяемого материала при изготовлении, диаметра витка, правильности центровки и многих других моментов. Крайние витки часто изготавливаются таким образом, чтобы могли воспринимать большую нагрузку при эксплуатации. - До начала деформации полная механическая энергия отсутствует. При этом на тело не влияет сила упругости. Каждая пружина имеет исходное положение, которое она сохраняет на протяжении длительного периода. Однако, за счет определенной жесткости происходит фиксация тела в начальном положении. Имеет значение то, каким образом прикладывается усилие. Примером назовем то, что она должна быть направлена вдоль оси пружины, так как в противном случае есть вероятность появления деформации и многих других проблем.
 У каждой пружины есть свои определенный придел сжатия и растяжения. При этом максимальное сжатие представлено отсутствием зазора между отдельными витками, при растяжении есть момент, когда происходит невозвратная деформация изделия. При слишком сильном удлинении проволоки происходит изменение основных свойств, после чего изделие не возвращается в свое первоначальное положение.
У каждой пружины есть свои определенный придел сжатия и растяжения. При этом максимальное сжатие представлено отсутствием зазора между отдельными витками, при растяжении есть момент, когда происходит невозвратная деформация изделия. При слишком сильном удлинении проволоки происходит изменение основных свойств, после чего изделие не возвращается в свое первоначальное положение. - В рассматриваемом случае колебания совершаются за счет действия силы упругости. Она характеризуется довольно большим количество особенностей, которые должны учитываться. Воздействие упругости достигается за счет определенного расположения витков и типа применяемого материала при изготовлении. При этом сила упругости может действовать в обе стороны. Чаще всего происходит сжатие, но также может проводится растяжение – все зависит от особенностей конкретного случая.
- Скорость перемещения тела может варьировать в достаточно большом диапазоне, все зависит от того, какое оказывается воздействие. К примеру, пружинный маятник может перемещать подвешенный груз в горизонтальной и вертикальной плоскости.
 Действие направленного усилия во многом зависит от вертикальной или горизонтальной установки.
Действие направленного усилия во многом зависит от вертикальной или горизонтальной установки.
В целом можно сказать, что пружинный маятник определение довольно обобщенное. При этом скорость перемещения объекта зависит от различных параметров, к примеру, величины приложенного усилия и других моментов. Перед непосредственным проведением расчетов проводится создание схемы:
- Указывается опора, к которой крепится пружина. Зачастую для ее отображения рисуется линия с обратной штриховкой.
- Схематически отображается пружина. Она часта представлена волнистой линией. При схематическом отображении не имеет значение длина и диаметральный показатель.
- Также изображается тело. Оно не должно соответствовать размерам, однако имеет значение место непосредственного крепления.
Схема требуется для схематического отображения всех сил, которые оказывают влияние на устройство. Только в этом случае можно учесть все, что влияет на скорость перемещения, инерцию и многие другие моменты.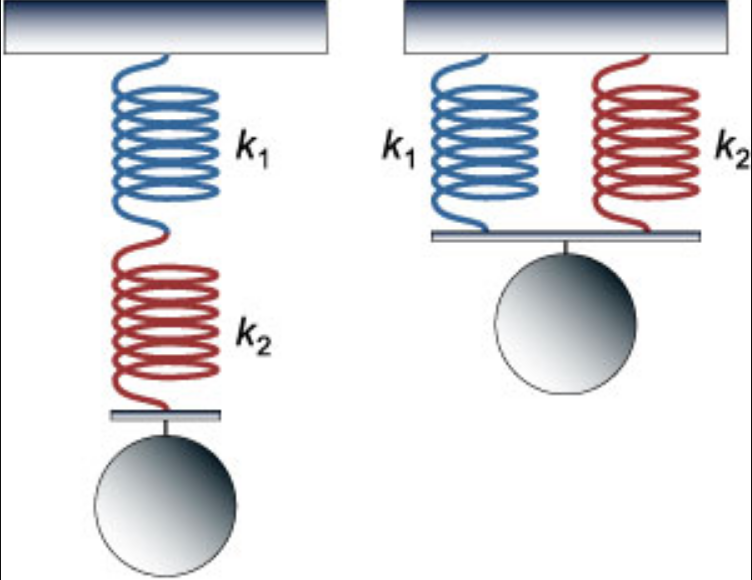
Пружинные маятники применяются не только при расчетах ил решении различных задач, но также и на практике. Однако, не все свойства подобного механизма применимы.
Примером можно назвать случай, когда колебательные движения не требуются:
- Создание запорных элементов.
- Пружинные механизмы, связанные с транспортировкой различных материалов и объектов.
Проводимые расчеты пружинного маятника позволяют подобрать наиболее подходящий вес тела, а также тип пружины. Она характеризуется следующими особенностями:
- Диаметр витков. Он может быть самым различным. От показателя диаметра во многом зависит то, сколько требуется материала для производства. Диаметр витков также определяет то, какое усилие должно прикладываться для полного сжатия или частичного растяжения. Однако, увеличение размеров может создать существенные трудности с установкой изделия.
- Диаметр проволоки. Еще одним важным параметром можно назвать диаметральный размер проволоки.
 Он может варьировать в широком диапазоне, зависит прочность и степень упругости.
Он может варьировать в широком диапазоне, зависит прочность и степень упругости. - Длина изделия. Этот показатель определяет то, какое усилие требуется для полного сжатия, а также какой упругостью может обладать изделие.
- Тип применяемого материала также определяет основные свойства. Чаще всего пружина изготавливается при применении специального сплава, который обладает соответствующие свойствами.
При математических расчетах многие моменты не учитываются. Усилие упругости и многие другие показатели выявляются путем расчета.
Виды пружинного маятника
Выделяют несколько различных видов пружинного маятника. Стоит учитывать, что классификация может проводится по типу устанавливаемой пружины. Среди особенностей отметим:
- Довольно большое распространение получили вертикальные колебания, так как в этом случае на груз не оказывается сила трения и другое воздействие.
 При вертикальном расположении груза существенно увеличивается степень воздействия силы тяжести. Распространен этот вариант исполнения при проведении самых различных расчетов. За счет силы тяжести есть вероятность того, что тело в исходной точке будет совершать большое количество инерционных движений. Этому также способствует упругость и инерция движения тела в конце хода.
При вертикальном расположении груза существенно увеличивается степень воздействия силы тяжести. Распространен этот вариант исполнения при проведении самых различных расчетов. За счет силы тяжести есть вероятность того, что тело в исходной точке будет совершать большое количество инерционных движений. Этому также способствует упругость и инерция движения тела в конце хода. - Также применяется горизонтальный пружинный маятник. В этом случае груз находится на опорной поверхности и на момент перемещения также возникает трение. При горизонтальном расположении сила тяжести работает несколько иначе. Горизонтальное расположение тела получило широкое распространение в различных задачах.
Рассчитывается движение пружинного маятника можно при использовании достаточно большого количества различных формул, который должны учитывать воздействие всех сил. В большинстве случаев устанавливается классическая пружина. Среди особенностей отметим следующее:
- Классическая витая пружина сжатия сегодня получила весьма широкое распространение.
 В этом случае между витками есть пространство, которое называется шагом. Пружина сжатия может и растягиваться, но зачастую она для этого не устанавливается. Отличительной особенностью можно назвать то, что последние витки выполнены в виде плоскости, за счет чего обеспечивается равномерное распределения усилия.
В этом случае между витками есть пространство, которое называется шагом. Пружина сжатия может и растягиваться, но зачастую она для этого не устанавливается. Отличительной особенностью можно назвать то, что последние витки выполнены в виде плоскости, за счет чего обеспечивается равномерное распределения усилия. - Может устанавливаться вариант исполнения для растяжения. Он рассчитан на установку в случае, когда приложенное усилие становится причиной увеличения длины. Для крепления проводится размещение крючков.
Распространены оба варианта исполнения. При этом важно уделить внимание тому, чтобы сила прикладывалась параллельно оси. В противном случае есть вероятность смещения витков, что становится причиной возникновения серьезных проблем, к примеру, деформации.
Сила упругости в пружинном маятнике
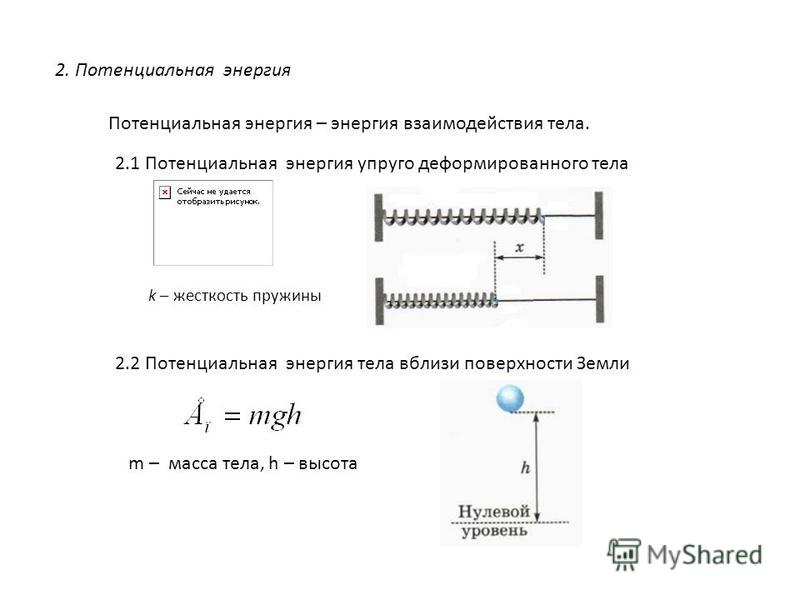
Следует учитывать тот момент, что до деформирования пружины она находится в положении равновесия. Приложенная сила может приводить к ее растягиванию и сжиманию.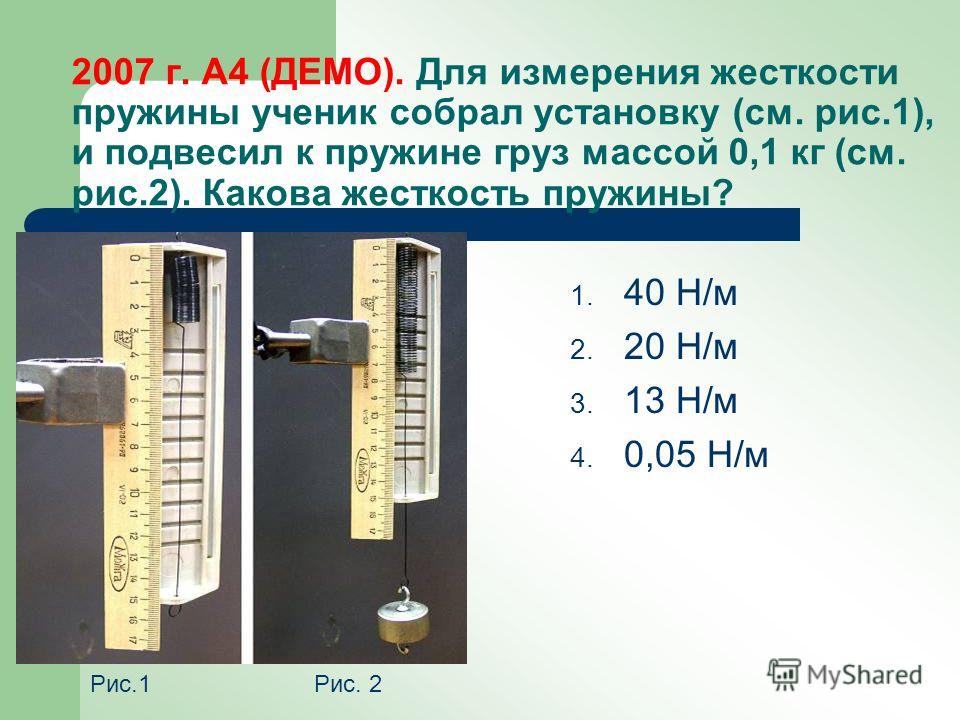 Сила упругости в пружинном маятнике рассчитывается в соответствии с тем, как воздействует закон сохранения энергии. Согласно принятым нормам возникающая упругость пропорциональна смещению тела. В этом случае кинетическая энергия рассчитывается по формуле: F=-kx. В данном случае применяется коэффициент жесткости пружины.
Сила упругости в пружинном маятнике рассчитывается в соответствии с тем, как воздействует закон сохранения энергии. Согласно принятым нормам возникающая упругость пропорциональна смещению тела. В этом случае кинетическая энергия рассчитывается по формуле: F=-kx. В данном случае применяется коэффициент жесткости пружины.
Выделяют довольно большое количество особенностей воздействия силы упругости в пружинном маятнике. Среди особенностей отметим:
- Максимальная сила упругости возникает на момент, когда тело находится на максимальном расстоянии от положения равновесия. При этом в подобном положении отмечается максимальное значение ускорение тела. Не следует забывать о том, что может проводится растягивание и сжатие пружины, оба варианта несколько отличается. При сжатии минимальная длина изделия ограничивается. Как правило, она имеет длину, равную диаметру витка умноженное на количество. Слишком большое усилие может стать причиной смещения витков, а также деформации проволоки.
 При растяжении есть момент удлинения, после которого происходит деформация. Сильное удлинение приводит к тому, что возникающей силы упругости недостаточно для возврата изделия в первоначальное состояние.
При растяжении есть момент удлинения, после которого происходит деформация. Сильное удлинение приводит к тому, что возникающей силы упругости недостаточно для возврата изделия в первоначальное состояние. - При сближении тела к месту равновесия происходит существенное уменьшение длины пружины. За счет этого наблюдается постоянное снижение показателя ускорения. Все это происходит за счет воздействия усилия упругости, которая связано с типом применяемого материала при изготовлении пружины и ее особенностями. Длина уменьшается за счет того, что расстояние между витками снижается. Особенностью можно назвать равномерное распределение витков, лишь только в случае дефектов есть вероятность нарушения подобного правила.
- На момент достижения точки равновесия сила упругости снижается до нуля. Однако, скорость не снижается, так как тело движется по инерции. Точка равновесия характеризуется тем, что длина изделия в ней сохраняется на протяжении длительного периода при условии отсутствия внешнего деформирующего усилия.
 Точка равновесия определяется в случае построения схемы.
Точка равновесия определяется в случае построения схемы. - После достижения точки равновесия возникающая упругость начинает снижать скорость перемещения тела. Она действует в противоположном направлении. При этом возникает усилие, которое направлено в обратную сторону.
- Дойдя крайней точки тело начинает двигаться в противоположную сторону. В зависимости от жесткости установленной пружины подобное действие будет повторятся неоднократно. Протяженность этого цикла зависит от самых различных моментов. Примером можно назвать массу тела, а также максимальное приложенное усилие для возникновения деформации. В некоторых случаях колебательные движения практически незаметны, но они все же возникают.
Приведенная выше информация указывает на то, что колебательные движения совершаются за счет воздействия упругости. Деформация происходит за счет приложенного усилия, которое может варьировать в достаточно большом диапазоне, все зависит от конкретного случая.
Уравнения колебаний пружинного маятника
Колебания пружинного маятника совершаются по гармоническому закону. Формула, по которой проводится расчет, выглядит следующим образом: F(t)=ma(t)=-mw2x(t).
В приведенной выше формуле указывается (w) радиальная частота гармонического колебания. Она свойственна силе, которая распространяется в границах применимости закона Гука. Уравнение движения может существенно отличаться, все зависит от конкретного случая.
Если рассматривать колебательное движение, то следует уделить внимание следующим моментам:
- Колебательные движения наблюдаются только в конце перемещения тела. Изначально оно прямолинейное до полного освобождения усилия. При этом сила упругости сохраняется на протяжении всего времени, пока тело находится в максимально отдаленном положении от нуля координат.
- После растяжения тело возвращается в исходное положение. Возникающая инерция становится причиной, по которой может оказываться воздействие на пружину.
 Инерция во многом зависит от массы тела, развитой скорости и многих других моментов.
Инерция во многом зависит от массы тела, развитой скорости и многих других моментов.
В результате этого возникает колебание, которое может длиться в течение длительного периода. Приведенная выше формула позволяет провести расчет с учетом всех моментов.
Формулы периода и частоты колебаний пружинного маятника
При проектировании и вычислении основных показателей также уделяется довольно много внимания частоте и периоду колебания. Косинус – периодическая функция, в которой применяется значение, неизменяемое через определенный промежуток времени. Именно этот показатель называют период колебаний пружинного маятника. Для обозначения этого показателя применяется буква Т, также часто используется понятие, характеризующее значение, обратное периоду колебания (v). В большинстве случаев при расчетах применяется формула T=1/v.
Период колебаний вычисляется по несколько усложненной формуле. Она следующая: T=2п√m/k. Для определения частоты колебания используется формула: v=1/2п√k/m.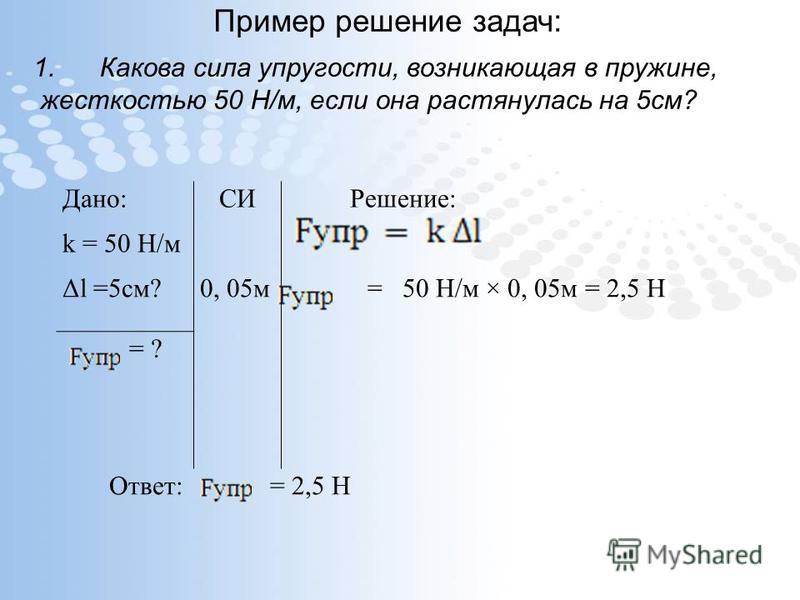
Рассматриваемая циклическая частота колебаний пружинного маятника зависит от следующих моментов:
- Масса груза, который прикреплен к пружине. Этот показатель считается наиболее важным, так как оказывает влияние на самые различные параметры. От массы зависит сила инерции, скорость и многие другие показатели. Кроме этого, масса груза – величина, с измерением которой не возникает проблем из-за наличия специального измерительного оборудования.
- Коэффициент упругости. Для каждой пружины этот показатель существенно отличается. Коэффициент упругости указывается для определения основных параметров пружины. Зависит этот параметр от количества витков, длины изделия, расстояние между витками, их диаметра и многого другого. Определяется он самым различным образом, зачастую при применении специального оборудования.
Не стоит забывать о том, что при сильном растяжении пружины закон Гука прекращает действовать.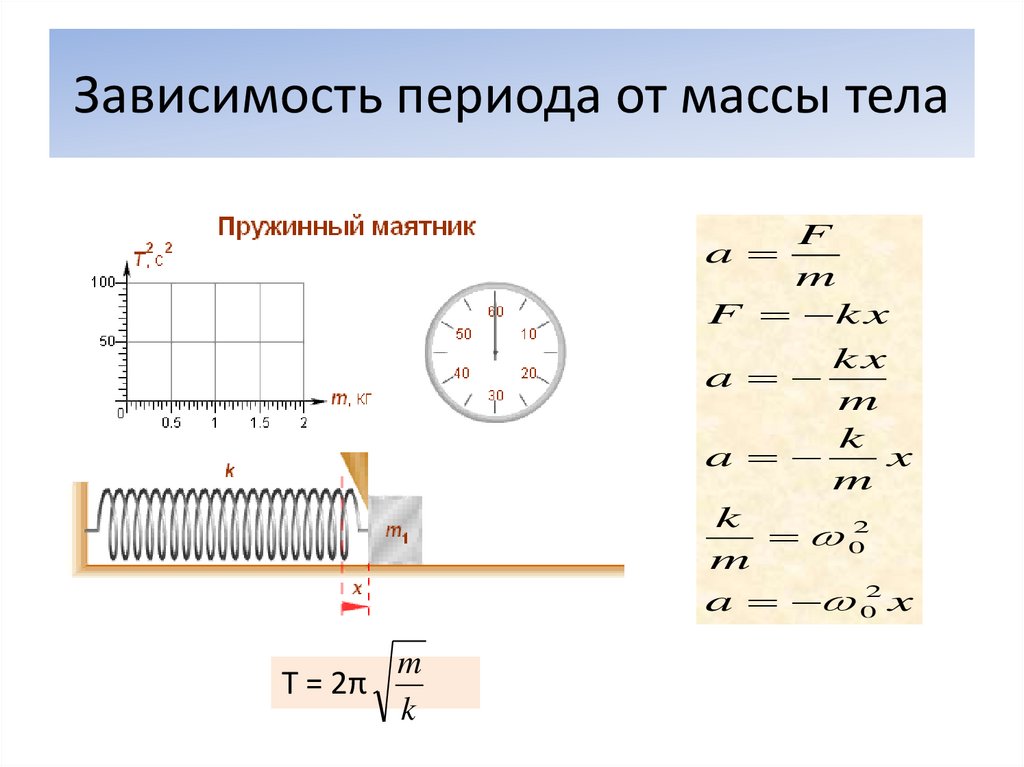 При этом период пружинного колебания начинает зависеть от амплитуды.
При этом период пружинного колебания начинает зависеть от амплитуды.
Для измерения периода применяется всемирная единица времени, в большинстве случаев секунды. В большинстве случаев амплитуда колебаний вычисляется при решении самых различных задач. Для упрощения процесса проводится построение упрощенной схемы, на которой отображаются основные силы.
Формулы амплитуды и начальной фазы пружинного маятника
Определившись с особенностями проходимых процессов и зная уравнение колебаний пружинного маятника, а также начальные значения можно провести расчет амплитуды и начальной фазы пружинного маятника. Для определения начальной фазы применяется значение f, амплитуда обозначается символом A.
Для определения амплитуды может использоваться формула: А=√x 2 +v 2 /w 2 . Начальная фаза высчитывается по формуле: tgf=-v/xw.
Применяя эти формулы можно провести определение основных параметров, которые применяются при расчетах.
Энергия колебаний пружинного маятника
Рассматривая колебание груза на пружине нужно учитывать тот момент, что при движение маятника может описываться двумя точками, то есть оно носит прямолинейный характер. Этот момент определяет выполнение условий, касающихся рассматриваемой силы. Можно сказать, что полная энергия потенциальная.
Этот момент определяет выполнение условий, касающихся рассматриваемой силы. Можно сказать, что полная энергия потенциальная.
Провести расчет энергии колебаний пружинного маятника можно при учете всех особенностей. Основными моментами назовем следующее:
- Колебания могут проходить в горизонтальной и вертикальной плоскости.
- Ноль потенциальной энергии выбирается в качестве положения равновесия. Именно в этом месте устанавливается начало координат. Как правило, в этом положении пружина сохраняет свою форму при условии отсутствия деформирующей силы.
- В рассматриваемом случае рассчитываемая энергия пружинного маятника не учитывает силу трения. При вертикальном расположении груза сила трения несущественна, при горизонтальном тело находится на поверхности и при движении может возникнуть трение.
- Для расчета энергии колебания применяется следующая формула: E=-dF/dx.
Приведенная выше информация указывают на то, что закон сохранения энергии выглядит следующим образом: mx 2 /2+mw 2 x 2 /2=const. Применяемая формула говорит о следующем:
Применяемая формула говорит о следующем:
- Максимальная кинетическая энергия установленного маятника прямо пропорциональна максимальному значению потенциальной.
- На момент осциллятора среднее значение обоих сил равны.
Провести определение энергии колебания пружинного маятника можно при решении самых различных задач.
Свободные колебания пружинного маятника
Рассматривая то, чем вызваны свободные колебания пружинного маятника следует уделить внимание действию внутренних сил. Они начинают формироваться практически сразу после того, как телу было передано движение. Особенности гармонических колебаний заключаются в нижеприведенных моментах:
- Могут также возникать и другие типы сил воздействующего характера, который удовлетворяют все нормы закона, называются квазиупругими.
- Основными причинами действия закона могут быть внутренние силы, которые формируются непосредственно на момент изменения положения тела в пространстве. При этом груз обладает определенной массой, усилие создается за счет фиксации одного конца за неподвижный объект с достаточной прочностью, второго за сам груз.
 При условии отсутствия трения тело может совершать колебательные движения. В этом случае закрепленный груз называется линейным.
При условии отсутствия трения тело может совершать колебательные движения. В этом случае закрепленный груз называется линейным.
Не стоит забывать о том, что существует просто огромное количество различных видов систем, в которых осуществляется движение колебательного характера. В них также возникает упругая деформация, которая становится причиной применения для выполнения какой-либо работы.
Если вы нашли ошибку, пожалуйста, выделите фрагмент текста и нажмите Ctrl+Enter.
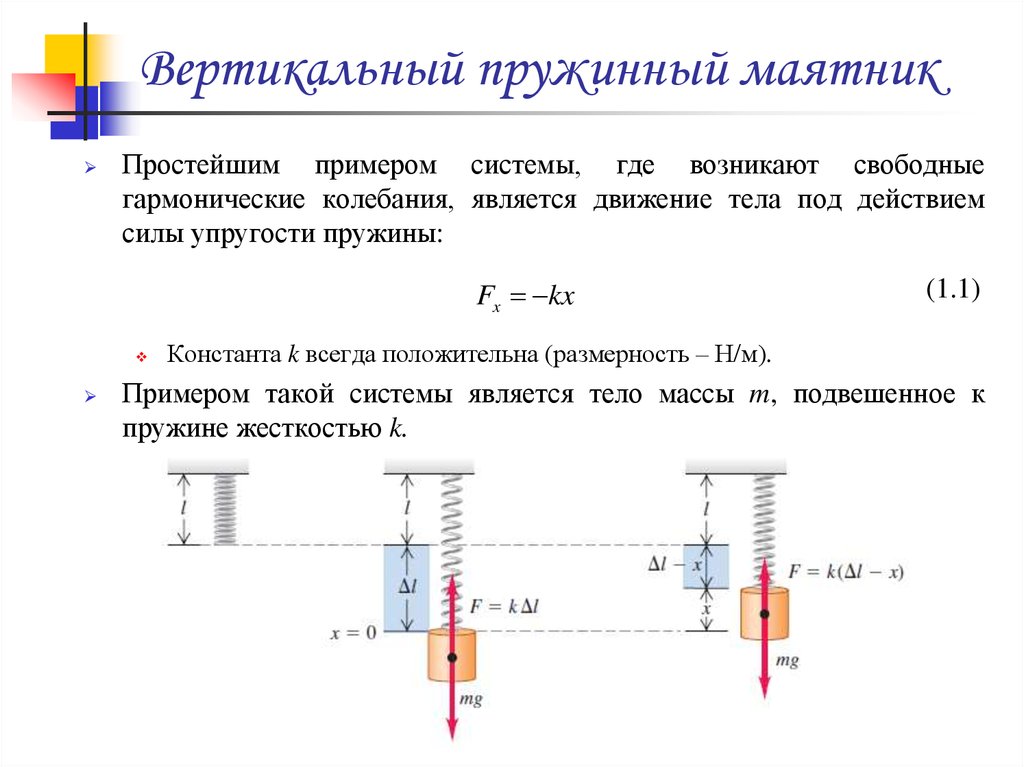
Пружина – упругий объект, целенаправленно подвергающийся сжатию или растяжению, в результате чего может запасать энергию, а затем, при ослабевании внешней деформирующей силы, возвращать ее. Пружины в нормальных условиях не должны подвергаться остаточным (пластическим) деформациям, т.е. таким воздействиям, после которых форма изделия уже не восстанавливается вследствие нарушения структуры их материала.
Типы пружин
Пружины можно классифицировать по направлению прилагаемой нагрузки:
- пружины растяжения; предназначены для работы в режиме растягивания, при деформации их длина увеличивается; как правило, такие устройства имеют нулевой шаг, т.
 е. намотаны “виток к витку”; примером могут служить пружины в весах-безменах, пружины для автоматического закрытия дверей и т.д.;
е. намотаны “виток к витку”; примером могут служить пружины в весах-безменах, пружины для автоматического закрытия дверей и т.д.; - пружины сжатия под нагрузкой, напротив, укорачиваются; в исходном состоянии между их витками есть некоторое расстояние, как, например, в амортизаторах автомобильных подвесок.
В данной статье рассматриваются пружины, представляющие собой цилиндрические спирали. В технике применяется много других разновидностей упругих устройств: пружины в виде плоских спиралей (используются в механических часах), в виде полос (рессоры), пружины кручения (в точных весах), тарельчатые (сжимающиеся конические поверхности) и т.п. Своего рода пружинами являются амортизирующие изделия из полимерных эластичных материалов, прежде всего резины. Во всех этих устройствах используется один и тот же принцип – запасать энергию упругой деформации и возвращать ее.
Попробуй обратиться за помощью к преподавателям
Физические характеристики пружин
Цилиндрические пружины характеризуются рядом параметров, сочетание которых обуславливает их жесткость – способность сопротивляться деформации:
- материал; пружины чаще всего изготавливают из стальной проволоки, причем сталь в них применялася особая, ее характеризует среднее или высокое содержание углерода, низкое содержание других примесей (низколегированный сплав) и особая термообработка (закалка), придающая материалу дополнительную упругость;
- диаметр проволоки; чем он меньше, тем эластичнее пружина, но тем меньше ее способность запасать энергию; пружины сжатия изготавливают, как правило, из более толстой проволоки, чем пружины растяжения;
- форма сечения проволоки; не всегда проволока, из которой намотана пружина, имеет круглое сечение; уплощенное сечение имеют пружины сжатия, чтобы при максимальном сокращении длины (виток “садится” на соседний виток) конструкция была более устойчивой;
- длина и диаметр пружины; длину пружины следует отличать от длины проволоки, из которой она намотана; эти два параметра согласуются через количество витков и диаметр пружины, который, в свою очередь, не следует путать с диаметром проволоки.

Задай вопрос специалистам и получи
ответ уже через 15 минут!
Существуют и другие физические характеристики, влияющие на работоспособность пружин. Например, при повышении температуры металл становится менее упругим, а при существенном ее понижении может стать хрупким. При интенсивной эксплуатации пружина со временем теряет часть упругости по причине постепенного разрушения связей между атомами кристаллической решетки.
Понятие жесткости
Жесткость как физическая величина характеризует силу, которую нужно приложить к пружине для достижения определенной степени растяжения или сжатия.
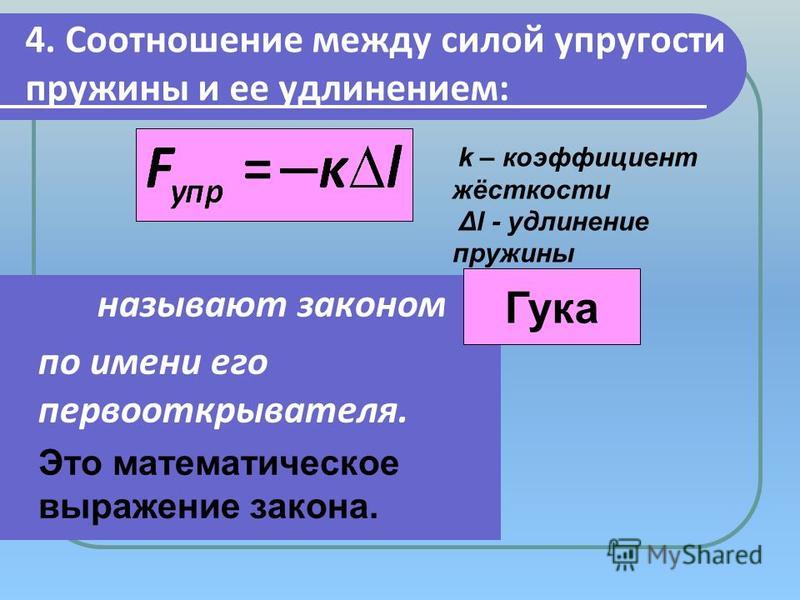
Коэффициент жесткости рассчитывается по формуле Гука:
где $F$ – сила, развиваемая пружиной, $k$ – коэффициент жесткости, зависящий от ее характеристик (см. выше) и измеряемый в ньютонах на метр, $x$ – абсолютное приращение расстояния, на которое изменилась длина пружины после приложения внешней силы. Знак минус в правой части формулы свидетельствует о том, что сила, порождаемая пружиной, действует в противоположном по отношению к нагрузке направлении.
Коэффициент жесткости можно вычислить экспериментально, подвешивая на расположенную вертикально и закрепленную за верхний конец пружину грузы с известной массой. В этом случае имеет место зависимость
$m cdot g – k cdot x = 0$,
где $m$ – масса, $g$ – ускорение свободного падения. Отсюда
Расчет жесткости цилиндрической пружины
Довольно просто понять как работает плоская пружина. Если положить на край письменного стола линейку и прижать один ее конец рукой к поверхности, но второй можно упруго изгибать, запасая и высвобождая энергию. Очевидно, что в момент изгиба расстояния между молекулами материала в некоторых фрагментах линейки увеличиваются, в некоторых уменьшаются. Электромагнитные связи, действующие между молекулами, стремятся вернуть вещество к прежнему геометрическому состоянию.
Несколько сложнее дело обстоит с цилиндрической пружиной. В ней энергия запасается не благодаря деформации изгиба, а за счет скручивания проволоки, из которой пружина навита, относительно продольной оси этой проволоки.
Представим сильно увеличенное сечение проволоки, из которой навита цилиндрическая пружина, выполненное перпендикулярной ее оси плоскостью. При таком рассмотрении можно абстрагироваться от спиральной формы и мысленно разбить весь объем проволоки на множество соприкасающихся торцевыми поверхностями “цилиндров”, диаметр которых равен диаметру проволоки, а высота стремится к нулю. Между соприкасающимися торцами действуют молекулярные силы, препятствующие деформации.
При растяжении или сжатии пружины угол наклона между витками изменяется. Соседние “цилиндры” при этом вращаются друг относительно друга в противоположных направлениях вокруг общей оси. В каждом таком сечении запасается энергия. Отсюда следует, что чем из более длинного куска проволоки навита пружина (здесь играют роль диаметр и высота цилиндра, а также шаг витка), тем большее количество энергии она способна запасти. Увеличение диаметра проволоки также повышает ее энергоемкость. В целом формула, учитывающая основные факторы жесткости пружины, выглядит так:
- $R$ — радиус цилиндра пружины,
- $n$ — количество витков проволоки радиуса $r$,
- $G$ — коэффициент, зависящий от материала.
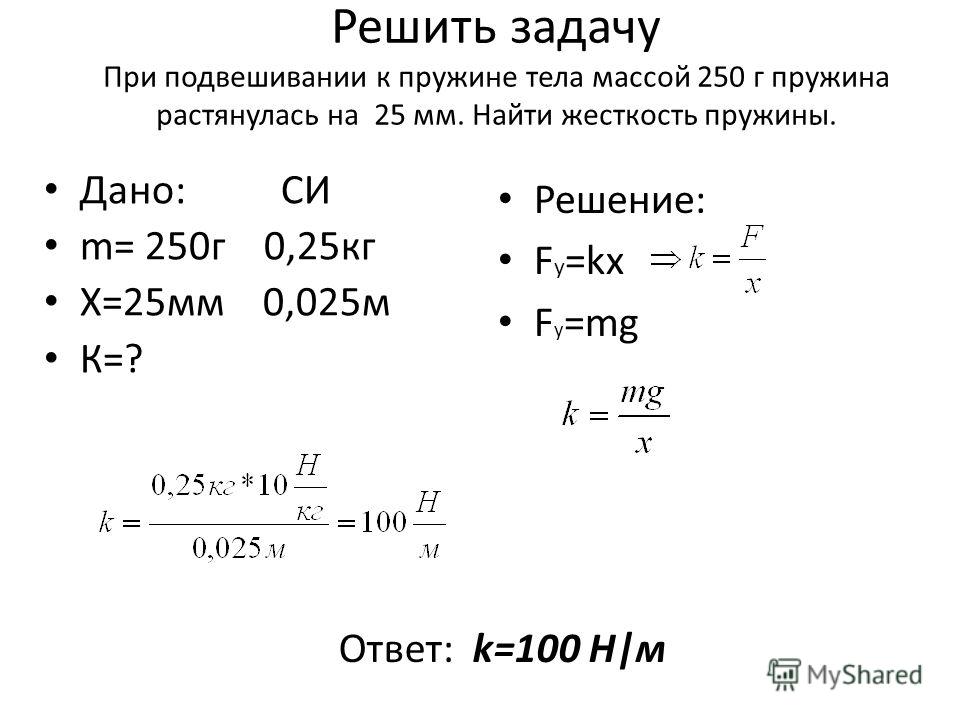
 <10>$ Па и диаметром 1 мм. Радиус пружины 20 мм, количество витков – 25.
<10>$ Па и диаметром 1 мм. Радиус пружины 20 мм, количество витков – 25.Подставим в формулу числовые значения, попутно переведя их в единицы системы СИ:
Ответ: $100 frac<Н><м>$
Так и не нашли ответ
на свой вопрос?Просто напиши с чем тебе
нужна помощьЧто такое пружинная постоянная?
Постоянная пружины — это математический параметр, присутствующий в законе Гука , математическом законе, описывающем накопленную потенциальную энергию свернутой или растянутой пружины. Закон Гука, названный в честь английского естествоиспытателя Роберта Гука, который впервые сформулировал этот принцип, гласит, что расстояние, на которое пружина растягивается или сжимается, прямо пропорционально приложенной силе. Закон Гука может быть выражен как:
F с = -kx
Где F с – требуемая сила, а x – расстояние. Постоянная пружины, записанная как k в уравнении, может рассматриваться как мера того, насколько трудно растянуть пружину.
 Константа пружины говорит вам, какое усилие пружина оказывает на единицу расстояния от состояния равновесия пружины (состояния, в котором она не сжимается и не растягивается). Следовательно, постоянную пружины можно рассматривать как меру жесткости пружины: какую силу нужно приложить, чтобы растянуть или сжать пружину и вывести ее из равновесия. Единица жесткости пружины k – ньютона на метр (Н/м).
Константа пружины говорит вам, какое усилие пружина оказывает на единицу расстояния от состояния равновесия пружины (состояния, в котором она не сжимается и не растягивается). Следовательно, постоянную пружины можно рассматривать как меру жесткости пружины: какую силу нужно приложить, чтобы растянуть или сжать пружину и вывести ее из равновесия. Единица жесткости пружины k – ньютона на метр (Н/м). Предположим, что сила 1000 Н удлиняет покоящуюся пружину на 3 метра. Какова жесткость пружины в этом случае? Постоянную пружины можно определить с помощью простого алгебраического анализа:
1000 Н = -k(3 м)
1000 Н/3 м = -k
-k = 333,33 Н/м
k= -333,33 Н/м
То есть , пружина, растянутая на 3 метра при приложении силы 1000 Н, имеет значение постоянной пружины -333,33 Н/м. Это значение в основном означает, что для перемещения такой пружины на расстояние 1 метр требуется 333,33 ньютона. Значение отрицательное, потому что сила, действующая на пружину, направлена в противоположную сторону от внешней силы, растягивающей пружину.

Точное значение жесткости пружины зависит от конкретной пружины. Очень гибкие пружины будут иметь небольшую жесткость и легко растягиваться или сжиматься, в то время как толстые тяжелые пружины будут иметь гораздо более высокую жесткость пружины, и их будет труднее растягивать или сжимать. В дополнение к фактическим пружинам закон Гука применим (до некоторой степени) в большинстве случаев, когда упругое тело деформируется под действием некоторой силы: дергание гитарной струны, ветер, дующий и сгибающий высокие здания, и засыпка упругой вечеринки. воздушный шар.
Наглядное представление закона Гука: расширение пропорционально силе. Предоставлено: Svjo через WikiCommons CC BY-SA 3.0
Простые примеры пружинной константы в действии
Допустим, у нас есть блок, прикрепленный к пружине, ориентированной горизонтально, и пружина находится в состоянии покоя. В этом положении приложенная сила равна 0, а смещение равно 0. Теперь предположим, что мы прикладываем некоторую силу F, чтобы сжать пружину на расстояние ∆x, а затем вернуть пружину обратно в равновесие.
 Теперь предположим, что мы прикладываем такое же усилие F, чтобы растянуть пружину на то же расстояние ∆x. Закон Гука говорит нам, что зависимость между смещением пружины Δx и приложением силы F при сжатии и растяжении может быть выражена как:
Теперь предположим, что мы прикладываем такое же усилие F, чтобы растянуть пружину на то же расстояние ∆x. Закон Гука говорит нам, что зависимость между смещением пружины Δx и приложением силы F при сжатии и растяжении может быть выражена как:|Ф| = к|Δх|
где k — жесткость пружины. Другими словами, жесткость пружины — это математическая величина, которая определяет взаимосвязь между приложенной силой и растяжением и сжатием пружины.
Приведем несколько реальных чисел к ранее описанному сценарию. Допустим, у нас есть пружина длиной 40 см, которая сжимается до 35 см под действием силы 3 Н. Какова жесткость такой пружины?
В этом случае Δx равно 5 см (0,05 м) и F равно 3 Н. Подстановка этих значений в наше уравнение дает нам:
|3| = к|0,05|
|3|/|0,05| = k
k = 60 Н/м.
То есть пружина имеет жесткость k, равную 60 Н/м. Чтобы сжать или растянуть пружину на один метр, потребуется усилие в 60 ньютонов.
Аналогичным образом работа с заданной жесткостью пружины может помочь вам предсказать, насколько пружина будет растягиваться или сжиматься под действием заданной силы.
 Допустим, у нас есть пружина с жесткостью 87 Н/м, и мы попытались растянуть ее с усилием 212 Н. Насколько растянется пружина?
Допустим, у нас есть пружина с жесткостью 87 Н/м, и мы попытались растянуть ее с усилием 212 Н. Насколько растянется пружина?И снова подстановка этих значений в наше уравнение дает нам:
|212| = 87 Н/м|Δx|
|212|/87 Н/м = Δx
Δx = 2,43 метра
Таким образом, приложение силы 212 ньютонов к пружине с жесткостью пружины 87 Н/м растянет пружину на 2,43 метра.
Наконец, если мы знаем постоянную пружины и желаемое смещение, мы можем определить, какое усилие нужно приложить к пружине, чтобы сместить ее на это расстояние. Скажем, у нас есть пружина, которую нужно сжать на 13 см (0,13 м), и известная жесткость пружины 57 Н/м. Сколько сил нам потребуется для выполнения этой задачи? Подстановка значений дает нам:
|Ф| = 57 Н/м|0,13|
F = 7,41 Н
Потребуется сила 7,41 ньютона, чтобы сместить пружину с жесткостью 57 Н/м на длину 13 см.
Закон Гука в системе с двумя пружинами
Допустим, у нас есть объект, прикрепленный к двум параллельным друг другу пружинам , каждая из которых имеет разную жесткость.
 Как мы должны моделировать комбинированные свойства двух пружин и как они влияют на растяжение и сжатие всей системы?
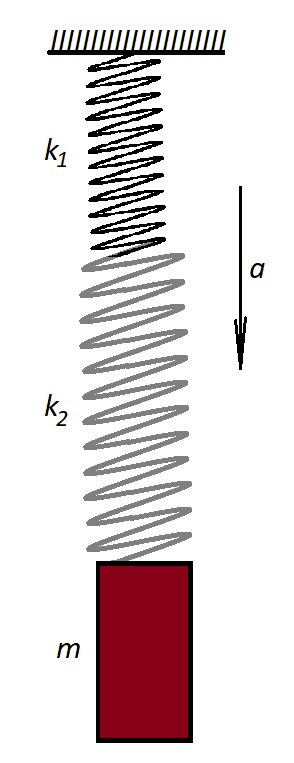
Как мы должны моделировать комбинированные свойства двух пружин и как они влияют на растяжение и сжатие всей системы?К счастью, для описания такой системы существует простое правило. В системе с двумя параллельными пружинами, каждая из которых имеет разную жесткость пружины, жесткость пружины всей системы представляет собой просто сумму индивидуальных жесткостей пружины. То есть в системе с 2 пружинами и 2 жесткостями k 1 и k 2 общая жесткость этой установки составляет всего
k total = k 1 + k 2
Системы параллельных пружин могут быть математически представлены как одна пружина, жесткость которой равна сумме постоянных пружин.
Итак, у нас есть блок, прикрепленный к двум пружинам, установленным параллельно друг другу, первая с жесткостью пружины k 1 = 100 Н/м, а вторая с константой k 2 = 200 Н/м. Какая сила потребуется, чтобы сместить всю пружинную систему на 5 см?
Поскольку мы знаем константы отдельных пружин, мы можем просто сложить два значения вместе, чтобы получить константу для всей системы.
 Подстановка этих значений в наше уравнение дает:
Подстановка этих значений в наше уравнение дает:|F| = (к 1 +k 2 )(Δx)
|F| = (100 Н/м + 200 Н/м)(0,05 м)
|F| = (300 Н/м)(0,05 м) = 15 Н
Таким образом, для смещения всей пружинной системы на 5 см потребуется сила 15 ньютонов. Линейный характер взаимосвязи между силой и сжатием/растяжением позволяет нам комбинировать свойства двух пружин для моделирования поведения всей системы из двух пружин.
Ограничения закона Гука
Закон Гука является аппроксимацией первого порядка поведения упругих материалов и применим не во всех областях. Закон Гука работает только для определенных диапазонов растяжения/сжатия, потому что существует максимальное расстояние, на которое эластичный материал может быть растянут или сжат, прежде чем он окончательно деформируется. Таким образом, закон Гука применим к относительно небольшому масштабу сил. Несмотря на это ограничение, закон Гука чрезвычайно полезен для инженеров и лежит в основе дисциплин, изучающих подобные пружинам явления, таких как сейсмология и акустика.
Закон Гука применим только для определенных степеней растяжения/сжатия. Предоставлено: «Закон Гука для пружин» Svjo через WikiCommons CC BY-SA 3.0.
В более общем случае сжатия/растяжения упругих тел математическая форма закона Гука точна, но его конкретные параметры могут быть неточны. В более сложных системах напряжения и деформации имеют независимые компоненты, поэтому было бы неправильно представлять их одним действительным числом, а тензором , который отображает несколько векторов в одну точку материала.
Физическое значение жесткости пружины
Все эти уравнения хороши, но что именно означает жесткость пружины в контексте физики? Другие параметры закона Гука, такие как сила и смещение, явно относятся к какой-то физической вещи (силе) или свойству (смещению), так к какому объекту или свойству относится упругая постоянная?
Можно думать об этом так: жесткость пружины относится к физическому свойству пружины, в частности к силе пружины сам проявляет себя в ответ на сжатие или растяжение.
 Согласно третьему закону динамики Ньютона, каждое действие имеет равное и противоположное противодействие. Таким образом, когда вы тянете за пружину, она оттягивается назад с равной силой. Когда вы нажимаете на пружину, она отталкивается с такой же силой. Тогда постоянная пружины является просто мерой отношения между этой приложенной силой и расстоянием, на которое перемещается пружина; количество силы, действующей на пружину на единицу смещения.
Согласно третьему закону динамики Ньютона, каждое действие имеет равное и противоположное противодействие. Таким образом, когда вы тянете за пружину, она оттягивается назад с равной силой. Когда вы нажимаете на пружину, она отталкивается с такой же силой. Тогда постоянная пружины является просто мерой отношения между этой приложенной силой и расстоянием, на которое перемещается пружина; количество силы, действующей на пружину на единицу смещения.В качестве альтернативы, можно рассматривать константу пружины как меру того, сколько потенциальной энергии сжатая или растянутая пружина накопила в своих витках. Сжатие или растяжение пружины за пределы ее точки равновесия создает напряжение в материалах пружины, напряжение, которое математически представляется как сила, направленная в направлении, противоположном направлению толкания или вытягивания. Когда пружина освобождается, эта накопленная энергия преобразуется в кинетическую энергию, и пружина возвращается в свое равновесное состояние.
 Таким образом, закон Гука можно рассматривать как частный случай более общих принципов, регулирующих связь между кинетической и потенциальной энергиями.
Таким образом, закон Гука можно рассматривать как частный случай более общих принципов, регулирующих связь между кинетической и потенциальной энергиями.Оценка эквивалентной жесткости пружины для использования в модели псевдожесткого тела податливых механизмов с большим отклонением | Дж. Мех. Дес.
Пропустить пункт назначения навигации
Научно-исследовательские работы
Л. Л. Хауэлл,
А. Мидха,
Т. В. Нортон
Информация об авторе и статье
Дж. Мех. Дез . Mar 1996, 118(1): 126-131 (6 страниц)
https://doi.org/10.1115/1.2826843
Опубликовано в Интернете: 1 марта 1996 г.
История статьи
Получено:
1 февраля 1994 г.

Пересмотрено:
1 августа 1995 г.
Онлайн:
11 декабря 2007 г. Просмотры
- Содержание артикула
- Рисунки и таблицы
- Видео
- Аудио
- Дополнительные данные
- Экспертная оценка
- Делиться
- MailTo
- Твиттер
Иконка Цитировать Цитировать
Разрешения
- Поиск по сайту
Citation
Хауэлл, Л. Л., Мидха, А., и Нортон, Т. В. (1 марта 1996). «Оценка эквивалентной жесткости пружины для использования в модели псевдожесткого тела механизмов с большим отклонением». КАК Я. Дж. Мех. Дез . март 1996 г.; 118(1): 126–131. https://doi.org/10.1115/1.2826843
Л., Мидха, А., и Нортон, Т. В. (1 марта 1996). «Оценка эквивалентной жесткости пружины для использования в модели псевдожесткого тела механизмов с большим отклонением». КАК Я. Дж. Мех. Дез . март 1996 г.; 118(1): 126–131. https://doi.org/10.1115/1.2826843
Скачать файл цитаты:
- Рис (Зотеро)
- Менеджер ссылок
- EasyBib
- Подставки для книг
- Менделей
- Бумаги
- Конечная примечание
- РефВоркс
- Бибтекс
- Процит
- Медларс
Расширенный поиск
Податливые механизмы частично или полностью получают свою подвижность за счет гибкости своих элементов, а не только за счет соединений жесткого тела. Прежде чем можно будет в полной мере использовать преимущества совместимых механизмов, необходимы более эффективные и удобные методы анализа и проектирования. В более ранней работе для удовлетворения этой потребности была разработана концепция модели псевдожесткого тела, соответствующая геометрически нелинейной балке с большим прогибом и торцевой нагрузкой. В этой статье исследуется эквивалентная пружинная жесткость псевдотвердого тела и предлагаются новые уравнения моделирования. Результатом является упрощенный метод моделирования отношений сила/прогиб элементов с большим отклонением в податливых механизмах. Полученные модели полезны для визуализации движения систем с большим отклонением, а также для быстрой и эффективной оценки и оптимизации конструкций податливых механизмов.
В более ранней работе для удовлетворения этой потребности была разработана концепция модели псевдожесткого тела, соответствующая геометрически нелинейной балке с большим прогибом и торцевой нагрузкой. В этой статье исследуется эквивалентная пружинная жесткость псевдотвердого тела и предлагаются новые уравнения моделирования. Результатом является упрощенный метод моделирования отношений сила/прогиб элементов с большим отклонением в податливых механизмах. Полученные модели полезны для визуализации движения систем с большим отклонением, а также для быстрой и эффективной оценки и оптимизации конструкций податливых механизмов.
Раздел выпуска:
Исследовательские статьи
Темы:
Совместимые механизмы, Отклонение, пружины, Жесткость, Моделирование, Процессы инженерного проектирования, Механический допуск, Оптимизация, Визуализация
1.
Bathe
K.-J.
и
Bolourch
S.
,
1979
, «
Анализ большого смещения трехмерных конструкций луча
»,
Международный журнал для численных методов инженерии
, вып.
14
, стр.
961
–
986
.
2.
Bisshopp
K.E.
и
Drucker
D.C.
,
1945
, «
Большой прогиб консольных балок
»,
Ежеквартальный журнал прикладной математики
, Vol.
3
, №
3
, стр.
272
–
275
.
3.
Бернс, Р. Х., 1964, «Кинетостатический синтез гибких звеньев», доктор философии. Диссертация, Йельский университет.
4.
Бернс Р. Х. и Кроссли Ф. Р. Э., 19 лет68, «Кинетостатический синтез гибких звеньев», документ ASME № 68-Mech-36.
5.
Frisch-Fay, R., 1962, Гибкие стержни , Butterworth, Washington, D.C. Диссертация, Университет Пердью.
7.
Howell, L.L., 1993, «Обобщенная теория замыкания цикла для анализа и синтеза податливых механизмов», доктор философии. Диссертация, Университет Пердью.
8.
Howell
L. L.
и
MIDHA
A.
,
1994
A, «
Метод для конструкции механизмов соответствия с малыми гибкой длинной длиной
88888 888 888 888 888 888 88888 »,
ASME ЖУРНАЛ МЕХАНИЧЕСКОГО ПРОЕКТИРОВАНИЯ
, Vol.
116
, №
1
, стр.
280
–
290
.
9.
Хауэлл, Л.Л., и Мидха, А., 1994b, «Развитие отношений силы и отклонения для податливых механизмов», Элементы машин и динамика машин , Г. Р. Пеннок, изд., DE-Vol. 71, 23-я конференция по механизмам ASME, стр. 501–508.
10.
Howell
L. L.
,
Midha
A.
, and
Norton
T. W.
,
1994
, “
Evaluation of Equivalent Spring Stiffness for Use in Модель псевдожесткого тела податливых механизмов с большим отклонением
»,
Механизм синтеза и анализа
, G.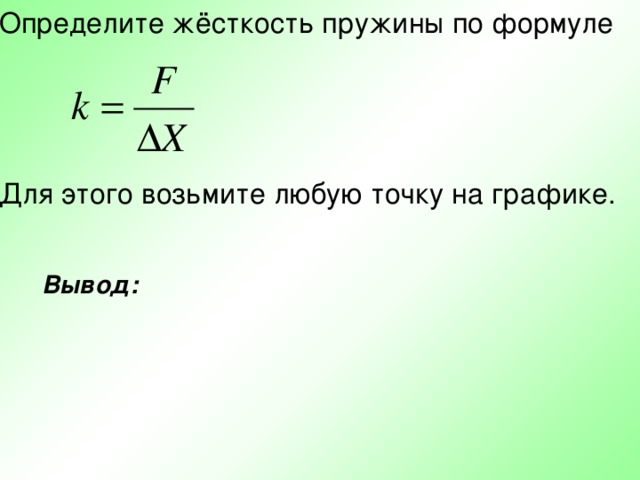 R. Pennock, ed., DE-Vol.
R. Pennock, ed., DE-Vol.
70
, 23-я конференция механизмов ASME, стр.
405
–
412
.
11.
Howell
L. L.
и
MIDHA
A.
,
1995
, «
Параметрические приосталкивания.0007
»,
ASME JOURNAL OF MEHANICAL DESIGN
, Vol.
117
, №
1
, стр.
156
–
165
.
12.
Midha
A.
,
Norton
T. W.
, and
Howell
L. L.
L.
,
1994
, “
On the Nomenclature, Classification, and Abstractions совместимых механизмов
»,
ASME JOURNAL OF MEHANICAL DESIGN
, Vol.
116
, №
1
, стр.
270
–
279
.
13.
Norton, T.W., 1991, «О номенклатуре, классификации и мобильности совместимых механизмов», M.S. Диссертация, Университет Пердью.
14.
Salamon, B.A., 1989, «Аспекты механических преимуществ при проектировании совместимых механизмов», M.S. Диссертация, Университет Пердью.
15.
Севак, Н. М., и МакЛарнан, К. В., 1974 г., «Оптимальный синтез механизмов гибких звеньев с большими статическими отклонениями», Документ ASME № 74-DET-83.
16.
Yang
T. Y.
,
1973
, «
Matrix Dellighation Solution для эластичных проблем лучей и кадров
»
Международный журнал. Солиц и конструкции
,
Международный журнал.
9
, №
7
, стр.
829
–
842
.
Этот контент доступен только в формате PDF.
В настоящее время у вас нет доступа к этому содержимому.
25,00 $
Покупка
Товар добавлен в корзину.
Проверить Продолжить просмотр Закрыть модальный режимЖесткость пружины | Научный.Нет
Заголовок статьиСтраница
Моделирование элемента жесткости в системе масса-пружина с несколькими степенями свободы
Аннотация: Структурная динамика в структурном инженерном анализе включает модальные параметры (собственная частота, форма моды и коэффициент демпфирования). На модальные параметры инженерных сооружений в основном влияют демпфирующие и жесткостные свойства. В данной исследовательской работе представлена надежность элемента CELAS в моделировании методом конечных элементов для представления параметра жесткости. Упрощенная инженерная конструкция, рассматриваемая в данном исследовании, представляет собой систему масса-пружина с несколькими степенями свободы. Экспериментальные модальные испытания проводятся с использованием электромагнитного вибратора в качестве возбудителя и акселерометра для регистрации собственной частоты системы. Анализ нормального режима HyperMesh используется для вычисления собственной частоты системы масса-пружина. Сравнительная оценка выполняется для определения точности собственных частот, полученных в результате анализа моделирования, и измеренных аналогов. Следовательно, обнаружено, что элемент CELAS имеет хорошие возможности для представления в качестве параметра жесткости при моделировании методом конечных элементов.
На модальные параметры инженерных сооружений в основном влияют демпфирующие и жесткостные свойства. В данной исследовательской работе представлена надежность элемента CELAS в моделировании методом конечных элементов для представления параметра жесткости. Упрощенная инженерная конструкция, рассматриваемая в данном исследовании, представляет собой систему масса-пружина с несколькими степенями свободы. Экспериментальные модальные испытания проводятся с использованием электромагнитного вибратора в качестве возбудителя и акселерометра для регистрации собственной частоты системы. Анализ нормального режима HyperMesh используется для вычисления собственной частоты системы масса-пружина. Сравнительная оценка выполняется для определения точности собственных частот, полученных в результате анализа моделирования, и измеренных аналогов. Следовательно, обнаружено, что элемент CELAS имеет хорошие возможности для представления в качестве параметра жесткости при моделировании методом конечных элементов.
3
Оптимизация жесткости пружин в механизме удержания пистолетных патронов
Резюме: Чтобы продлить срок службы удерживающей защелки патрона и стопора звена в механизме удержания патрона пистолета, жесткость трех пружин сжатия уменьшена посредством исследования конструкции и оптимизации конструкции на основе динамического анализа. Представляя нагрузку оболочки на типовой стадии при входе в канал ствола, устанавливаются дифференциальные уравнения движения в этом механизме. С поступательной скоростью оболочки в качестве расчетной переменной выполняются проектные исследования и анализ моделирования. И связь между скоростью снаряда и правильной подачей снаряда приобретается. Функция оценки строится с использованием жесткости пружин с выбором предпочтения. При использовании этой оценочной функции в качестве оптимальной цели, жесткости пружины в качестве проектных переменных и надлежащей подачи корпуса в качестве ограничивающего условия после расчета получается минимум из трех жесткостей пружины. Результаты показывают, что по сравнению с исходными расчетными параметрами результаты оптимизации значительно улучшаются, при этом жесткость отдельно снижается на 20,27%, 11,99% и 6,86%.
Результаты показывают, что по сравнению с исходными расчетными параметрами результаты оптимизации значительно улучшаются, при этом жесткость отдельно снижается на 20,27%, 11,99% и 6,86%.
163
Анализ чувствительности модели балка-пружина для сегмента щитового туннеля
Аннотация: В этой статье устанавливается модель конечно-элементной модели балки-пружины, исследуется влияние пружин вращения, давления и сдвига соответственно, а также анализируется чувствительность соответствующей кривой внутренней силы путем изменения значения жесткости пружины.
1263
Предварительное исследование фреттинг-износной надежности кольцевого ядерного топлива
Аннотация: Недавно было предложено топливо с двойным охлаждением (т. е. кольцевое топливо), которое совместимо с текущими действующими установками PWR, чтобы увеличить как удельную мощность, так и запасы безопасности. Однако из-за концепции конструкции, совместимой с современными установками PWR, по сравнению с существующим твердым ядерным топливом он показывает узкий зазор между топливными стержнями и требует изменения формы дистанционирующей решетки и их положения. Поскольку вибрация, вызванная потоком быстрого теплоносителя первого контура, является неизбежным явлением, необходимо изучить поведение фреттинг-износа между кольцевым топливом и проектируемыми дистанционирующими решетками. В данном исследовании фреттинг-износ был выполнен для оценки износостойкости кольцевого топлива с использованием специально разработанных пружин и углублений дистанционирующих решеток консольного типа и полусферической формы соответственно. На образце пружины с относительно небольшим значением жесткости фреттинг-износ начинался с обеих концевых областей, а затем постепенно переходил к центральной области. По результатам испытаний проведено сравнение фреттинг-износа кольцевого топлива с существующим твердым ядерным топливом и предложен сравнительный коэффициент его надежности.
Поскольку вибрация, вызванная потоком быстрого теплоносителя первого контура, является неизбежным явлением, необходимо изучить поведение фреттинг-износа между кольцевым топливом и проектируемыми дистанционирующими решетками. В данном исследовании фреттинг-износ был выполнен для оценки износостойкости кольцевого топлива с использованием специально разработанных пружин и углублений дистанционирующих решеток консольного типа и полусферической формы соответственно. На образце пружины с относительно небольшим значением жесткости фреттинг-износ начинался с обеих концевых областей, а затем постепенно переходил к центральной области. По результатам испытаний проведено сравнение фреттинг-износа кольцевого топлива с существующим твердым ядерным топливом и предложен сравнительный коэффициент его надежности.
2535
Метод оптимизации конструкции жесткости пружины, используемой в активном капоте двигателя системы защиты пешеходов
Аннотация: Среди пострадавших в автомобильных авариях большую долю травм занимают пешеходы. Ключевой проблемой безопасности транспортных средств стала защита пешеходов. Капот двигателя был наиболее вероятной зоной удара головы пешехода. Защита пешеходов под капотом двигателя была важной характеристикой автомобиля. Активный капот двигателя использовался для улучшения характеристик защиты пешеходов автомобиля и соблюдения правил. В системе подъема активного капота использованы пружины для повышения эффективности защиты пешеходов. В этом исследовании был разработан метод оптимизации конструкции жесткости пружины, используемой в активном капоте двигателя. Жесткость пружины К задавалась как конструктивная переменная, а ее интервал устанавливался в пределах 1~50 Н/мм. В качестве случаев оптимизации были выбраны зоны воздействия капота двигателя, в которых значения HIC исходного капота двигателя были выше средних значений соответствующих детских и взрослых зон. Цель состояла в том, чтобы минимизировать сумму значений HIC для этих выбранных зон. Первый тип ограничений заключался в том, что значения HIC дочерних зон были меньше среднего значения HIC дочерних зон.
Ключевой проблемой безопасности транспортных средств стала защита пешеходов. Капот двигателя был наиболее вероятной зоной удара головы пешехода. Защита пешеходов под капотом двигателя была важной характеристикой автомобиля. Активный капот двигателя использовался для улучшения характеристик защиты пешеходов автомобиля и соблюдения правил. В системе подъема активного капота использованы пружины для повышения эффективности защиты пешеходов. В этом исследовании был разработан метод оптимизации конструкции жесткости пружины, используемой в активном капоте двигателя. Жесткость пружины К задавалась как конструктивная переменная, а ее интервал устанавливался в пределах 1~50 Н/мм. В качестве случаев оптимизации были выбраны зоны воздействия капота двигателя, в которых значения HIC исходного капота двигателя были выше средних значений соответствующих детских и взрослых зон. Цель состояла в том, чтобы минимизировать сумму значений HIC для этих выбранных зон. Первый тип ограничений заключался в том, что значения HIC дочерних зон были меньше среднего значения HIC дочерних зон. Второй тип ограничений заключался в том, что значения HIC для взрослых зон были меньше среднего значения HIC для взрослых зон. Построена и решена модель оптимизации жесткости пружин активного капота на основе защиты пешеходов. Результаты оптимизации показали, что жесткость пружины, полученная этим методом, улучшила характеристики защиты пешеходов капота двигателя.
Второй тип ограничений заключался в том, что значения HIC для взрослых зон были меньше среднего значения HIC для взрослых зон. Построена и решена модель оптимизации жесткости пружин активного капота на основе защиты пешеходов. Результаты оптимизации показали, что жесткость пружины, полученная этим методом, улучшила характеристики защиты пешеходов капота двигателя.
4876
Исследование конечно-элементной модели многосвайного фундамента моста
Аннотация: Чтобы использовать программное обеспечение конечных элементов для завершения проектирования или расчета многосвайного фундамента моста, в этой статье обсуждается конечно-элементная модель (МКЭ) многосвайного моста, основанная на теории и положениях Кодекса проектирования грунта. Основание и фундамент автомобильных мостов и водопропускных труб (CDGBFHBC 2007) в Китае. Для МКЭ мостово-многосвайного фундамента оголовок рассматривается как твердое тело, сваи – как балки, а граничные связи – как ряд горизонтальных пружин и вертикальных пружин. Во-первых, формула жесткости для горизонтальных пружин и нижней вертикальной пружины выводится в соответствии с теорией упругого грунта и гипотезами Винклера. Во-вторых, для висячей сваи жесткость вертикальных пружин со стороны сваи определяется на основе принципа трения и упрощенного распределения сопротивления ствола сваи. Затем при МКЭ многосвайных свай необходимо обратить внимание на три вопроса: моделирование соединений между сваями и оголовком, модуль упругости, требующий дисконтирования, и вес сваи, находящейся под линией грунта (или локальной линией размыва), необходимо рассчитать наполовину. Принимая во внимание изгибающий момент секции сваи, часто контролирующий проектирование и расчет сваи, в этой статье дается упрощенный МКЭ сваи. Наконец, пример используется для введения применения МКЭ многосвайного фундамента моста.
103
Оценка поведения фреттинг-износа моделируемых несущих конструкций ядерного топливного стержня с двойным охлаждением
Аннотация: Было предложено использовать топливо с двойным охлаждением (т. е. кольцевое топливо) для существенного увеличения удельной мощности и запаса прочности по сравнению с твердым топливом на действующих установках PWR. Поскольку этот топливный стержень имеет больший внешний диаметр, чем обычный сплошной стержень, чтобы обеспечить достаточный внутренний поток, необходимо разработать новые геометрические формы опорной конструкции, а их надежность (т. . В этом исследовании характеристики опорной конструкции и поведение при фреттинг-износе анализируются и исследуются с использованием двух видов смоделированных опорных конструкций, имеющих рельефную и цилиндрическую формы. Характеристики их несущей конструкции были исследованы с использованием специально разработанной испытательной установки, и их результаты были сопоставлены с результатами аналитического метода. Кроме того, были экспериментально исследованы характеристики фреттинг-износа смоделированных опорных конструкций с учетом влияния контактных форм и значений их жесткости. На основе результатов испытаний была подробно обсуждена взаимосвязь между характеристиками несущей конструкции и их поведением при фреттинг-износе.