Сборка механизмов вращательного движения: Смотреть диафильм Сборка механизмов вращательного движения
alexxlab | 13.01.2023 | 0 | Разное
Образовательная программа подготовки квалифицированных рабочих, служащих Форма обучения очная Профессия
Образовательная программа подготовки квалифицированных рабочих, служащих Форма обучения очная Профессия
1 2 3 4 5 6 7 8 9 … 105
1 2 3 4 5 6 7 8 9 … 105 База данных защищена авторским правом ©www.psihdocs.ru 2023 | Главная страница Автореферат Анализ Анкета Бизнес-план Биография Бюллетень Викторина Выпускная работа Глава Диплом Дипломная работа |

 А
АТехнологические приёмы, применяемые при сборки механизмов поступательного движения
Похожие презентации:
Грузоподъемные машины. (Лекция 4.1.2)
(Лекция 4.1.2)
Зубчатые передачи
Гидравлический домкрат в быту
Детали машин и основы конструирования
Газораспределительный механизм
Свайные фундаменты. Классификация. (Лекция 6)
Ременные передачи
Редукторы
Техническая механика. Червячные передачи
Фрезерные станки. (Тема 6)
1. Технологические приёмы, применяемые при сборки механизмов поступательного движения
Выполнил:обучающийся гр.2.5 Хайдарбеков Р.М.Руководитель: А.В.Загребин
2. Содержание
Введение• Материалы, инструменты, приспособления
• Основы поступательного движения
• Инструкциионно технологическая карта,
технологических приёмов, применяемых при
сборке механизмов поступательного
движения
•Информационные источники
3. Введение
Механизмы поступательного движения. Отличительным признаком этих механизмов является наличиегибкого удлиненного инструмента, надетого на два и более шкивов.
 Он представлен в ленточнопильных,
Он представлен в ленточнопильных,ленточношлифовальных, цепнофрезерных и некоторых других станках. В машинах с двумя шкивами один
шкив приводной, второй – натяжной. Кроме того, натяжной шкив имеет ряд регулировочных и
вспомогательных движений, позволяющих регулировать положение ленты.
Механизмы резания ленточных шлифовальных станков могут быть выполнены с двумя или с
тремя шкивами. Механизм с тремя шкивами характерен для широколенточных шлифовальных станков
(рис.1 а)..Приложение 1). Обрезиненные вальцы 1 и 7 приводятся во вращение от одного
электродвигателя через ременную передачу 5. Валец 3 создает натяжение шлифовальной ленты 2 с
помощью пружинного или пневматического устройства 4. Для осуществления процесса шлифования
рабочая поверхность шлифовальной ленты под действием утюжка 6 прижимается к верхней поверхности
перемещаемой заготовки 8.
На узколенточных шлифовальных станках (рис. б) механизм резания состоит из двух шкивов:
ведущего 1 и ведомого 2, которые объединены шлифовальной лентой 5.
 Ведущий шкив получает
Ведущий шкив получаетвращение от электродвигателя 6, а ведомый шкив, установленный на суппорте 3, может перемещаться
при вращении маховика 4 для натяжения ленты.
Во всех механизмах резания с поступательным перемещением режущего инструмента
скорость главного движения зависит от частоты вращения ведущего шкива (вальца) и его диаметра.
Механизмы возвратно-поступательного движения. Характерное отличие этих механизмов –
переменная скорость движения, причем в зависимости от вида привода изменение скорости может быть
неравномерным на протяжении всего хода (кривошипно-шатунная схема) или только в периоды
реверсирования (например, реечный привод). Второй отличительный признак этих механизмов – наличие
значительных инерционных сил и их неуравновешенность, для снижения которой требуются специальные
расчеты и конструктивные решения.
4. Оборудование ,материалы и инструменты
Набор слесарного и мерительного инструментов, солидол.5. Основы поступательного движения
Поступательным называется такое движение твердого тела, прикотором любая прямая, проведенная в этом теле,
перемещается, оставаясь параллельной своему начальному
направлению.

Поступательно движутся педали велосипеда относительно его
рамы во время движения, поршни в цилиндрах двигателя
внутреннего сгорания относительно цилиндров, кабины колеса
обозрения в парках (рис.2. Приложение 2) относительно Земли.
Свойства поступательного движения определяются следующей
теоремой: при поступательном движении все точки тела
описывают одинаковые (при наложении совпадающие)
траектории и имеют в каждый момент времени одинаковые по
модулю и направлению скорости и ускорения.
6. Инструкциионно технологическая карта, технологических приёмов, применяемых при сборке механизмов поступательного движения
ОперацииМатериалы,
инструменты,
приспособления,
Инструкционные условия
1. Ходовой винт-гайка
Слесарный и мерительный набор
инструментов
1.Устанавливаются ходовой винт и
гайка.
2.Преобразуется вращательное движение
винта в поступательное движение гайки.
2. Зубчатое колесо-рейка
Слесарный и мерительный набор
инструментов
1.
 Монтаж зубчатого колеса и рейки.
Монтаж зубчатого колеса и рейки.2.Преобразует вращательное движение
зубчатого колеса в поступательное
движение рейки. Используются
прямозубые,косозубые и шевронные
передачи.
3. Эксцентриковый механизм
Слесарный и мерительный набор
инструментов
1. Монтируют эксцентриковый механизм.
2.Устанавливают вал,
3.К валу жестко закрепляют эксцентрик,
при помощи прессовой посадки.
4.Хомут эксцентрика изготавливают
цельным со
штоком.
5.Вращательное движение вала, с жёстко
закреплённым на нём эксцентриком,
преобразует в поступательное движение
хомута и связанного с ним
штока.(Подобный механизм применяют
для небольших перемещений).
4. Кулачковый механизм с дисковым наружным кулачком
Слесарный и мерительный набор
инструментов
1.Проводим монтаж: фигурного кулачка,
ролика, рычажной системы и зубчатой
рейки.
2. При вращении фигурного кулачка через
ролик, рычажную систему и зубчатый
сектор движение передается рейке, которая
совершает возвратно-поступательное
движение в соответствии с профилем
кулачка.
 Данный тип механизма нашел свое
Данный тип механизма нашел своеприменение для осуществления
автоматического цикла перемещений по
заданному закону в автоматах и
полуавтоматах, а также распределительных
механизмах.
5. Кулачковый механизм с дисковым внутренним кулачком
Слесарный и мерительный набор
инструментов
1. Монтируется фигурный кулачёк, ролик,
толкатель со штоком.
2. При вращении фигурного кулачка через
ролик движение передается толкателю,
который совершает возвратнопоступательное движение по заданному
закону в соответствии с профилем кулачка.
Применяется в автоматах и полуавтоматах.
6. Кулачковый механизм с плоским кулачком
Слесарный и мерительный набор
инструментов
1. Монтируется плоский кулачёк,
толкатель со штоком.
2. Поступательное движение плоского
кулачка преобразуется в возвратнопоступательное движение толкателя.
Применяется в копировальных устройствах
для согласования продольного и
поперечного движений подачи.

7. Механизм с цилиндрическим кулачком (один из вариантов
передачи ходовой винт-гайка)
Слесарный и мерительный набор
инструментов
1. Монтируется цилиндрический
кулачёк, толкатель со штоком, палец.
2. Механизм с цилиндрическим кулачком
преобразует вращательное движение
цилиндрического – кулачка через ролик и
палец в возвратно-поступательное
движение ползуна. Применяется для
управления перемещения зубчатых колес
в коробках скоростей и подач станков и
автоматов.
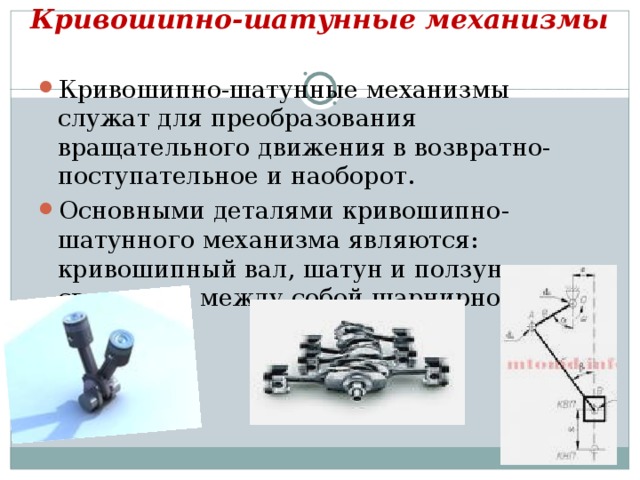
8. Кривошипно-шатунный механизм( в данном варианте – передача
ходовой винт-гайка)
Слесарный и мерительный набор
инструментов
1.Монтаж кривошипа, диска или
коленчатого вала, шатуна, ползуна ( или
поршня).
2. Кривошипно-шатунный механизм
преобразует вращательное движение
кривошипного диска или коленчатого
вала через шатун, в возвратнопоступательное движение ползуна (или
поршня). Величина хода ползуна
определяется удвоенным значением
радиуса кривошипа или несносности
коренных и шатунных шеек коленчатого
вала.
 Применяется в поршневых насосах
Применяется в поршневых насосахи компрессорах, кривошипных прессах,
механизмах подач станков, а также при
обратном преобразовании
поступательного движения во
вращательное в двигателях внутреннего
сгорания, паровых машинах и других
устройствах.
9. Список информационных источников
1.Л.Г.Чичеров “Нефтепромысловые машины и механизмы” Москва “Недра” 2017г.
2. А.Г.Молчанов и Л.Г.Чичеров “Нефтепромысловые машины и механизмы” Москва “Недра”
2016г.
3. В.А.Рогов – главный специалист отдела главного механика ООО ”РН – Юганскнефтегаз”
“Справочник механика” Нефтеюганск, 2016г.
4. А.А. Раабен, П.Е. Шевалдин и Н.Х. Максутов “Ремонт и монтаж нефтепромыслового
оборудования” Москва “Недра” 2017г.
English Русский Правила
Преобразование вращательного движения в линейное с помощью этих опций
Назад в отдел новостей
10 мая 2021 г.
Clemence Muron
Когда дело доходит до движения портативных и миниатюрных медицинских устройств, стандартный электрический мини-двигатель может показаться хорошей отправной точкой.
Вращение может быть преобразовано в прямолинейное движение с помощью системы винтов и гаек, установленной на валу двигателя. Существует два основных типа винтовых и гаечных систем: шарико-винтовая передача и ходовой винт.
Шарико-винтовая передача работает за счет контакта качения между гайкой и винтом. Шар рециркулирует по винтовой канавке. Компоненты качения обеспечивают низкое трение, обеспечивая при этом высокий КПД, превышающий 90 процентов, при высокой грузоподъемности.
Компоненты качения обеспечивают низкое трение, обеспечивая при этом высокий КПД, превышающий 90 процентов, при высокой грузоподъемности.A ходовой винт обычно состоит из винта из нержавеющей стали и пластиковой гайки. Оба компонента находятся в непосредственном контакте, создавая большее трение, чем шарико-винтовая система. Это может быть хорошим, экономичным вариантом, если стоимость является проблемой. Материал гайки обычно влияет на срок службы и максимальную нагрузочную способность системы. Однако с помощью двух предварительно натянутых гаек осевой люфт можно устранить. Обычно следует учитывать два типа линейных вариантов:
Стандартные линейные приводы, которые часто называют цифровыми линейными приводами (DLA), представляют собой полностью интегрированные линейные механизмы, в которых используется шаговый двигатель. Как правило, это экономичный выбор. Присущий шаговым технологиям двигатель сам по себе представляет собой систему позиционирования, поэтому для управления не требуется обратная связь по положению. DLA может управляться полным шагом, полушагом или микрошагом, в зависимости от требуемого разрешения.
Как правило, это экономичный выбор. Присущий шаговым технологиям двигатель сам по себе представляет собой систему позиционирования, поэтому для управления не требуется обратная связь по положению. DLA может управляться полным шагом, полушагом или микрошагом, в зависимости от требуемого разрешения.
Вариант 2: Специальная сборка двигателя
Для приложений, требующих высокой производительности в ограниченном пакете, рассмотрите возможность пользовательской сборки. Большинство нестандартных сборок изготавливаются либо с щеточным двигателем постоянного тока, либо с бесщеточным двигателем постоянного тока, либо с шаговым дисковым магнитным двигателем. Каждая технология имеет свои преимущества и преимущества по сравнению с шаговыми двигателями. Например, приложения с высоким ускорением хорошо подходят для двигателя с низкой инерцией, такого как шаговый двигатель с дисковым магнитом. Для более высокой мощности в небольшом корпусе лучшим вариантом может быть комбинация бесщеточного постоянного тока, редуктора и ходового винта. А для обеспечения высокой эффективности щеточный двигатель постоянного тока без сердечника может быть особенно желателен для приложений с батарейным питанием.
Для более высокой мощности в небольшом корпусе лучшим вариантом может быть комбинация бесщеточного постоянного тока, редуктора и ходового винта. А для обеспечения высокой эффективности щеточный двигатель постоянного тока без сердечника может быть особенно желателен для приложений с батарейным питанием.Индивидуальная сборка также обеспечивает гибкость при выборе ходового винта. Группа исследований и разработок может выбрать, какой шариковый или обычный ходовой винт предпочтительнее, предложить различные шаги, адаптировать материал или даже оптимизировать размеры.
Партнер для определения требований к устройству и двигателю
Для линейных приложений поставщики двигателей могут поддержать команду разработчиков, предложив стандартные линейные двигатели или создав линейный двигатель с индивидуальной конструкцией. В дополнение к определению технических требований к устройству поставщик двигателя и разработчик приложения также должны определить требования на уровне двигателя. Имея полное представление о потребностях проекта, проектные группы могут найти наилучший компромисс между техническими и коммерческими требованиями к инструменту.
В дополнение к определению технических требований к устройству поставщик двигателя и разработчик приложения также должны определить требования на уровне двигателя. Имея полное представление о потребностях проекта, проектные группы могут найти наилучший компромисс между техническими и коммерческими требованиями к инструменту.
Для получения дополнительной информации о миниатюрных двигателях для ручных медицинских устройств, посетите нашу страницу приложений
Внутренний Женевский механизм
Цель: Изучение внутреннего Женевского механизма с использованием Solidworks Введение Женевский механизм используется для преобразования вращательного движения в прерывистое вращательное движение .Женевский механизм широко используется из-за простоты конструкции, низкой стоимости. Существует в основном 3 типа женевских механизмов Внешний женевский механизм Внутренний женевский механизм…
Детали проекта
Загрузка. ..
..
Оставить комментарий
Спасибо, что решили оставить комментарий. Пожалуйста, имейте в виду, что все комментарии модерируются в соответствии с нашей политикой комментариев, и ваш адрес электронной почты не будет опубликован по соображениям конфиденциальности. Пожалуйста, оставьте личный и содержательный разговор.
Пожалуйста, войдите, чтобы добавить комментарий
Другие комментарии…
Комментариев пока нет!
Оставьте первый комментарий
Подробнее Проекты Ньютона Надара (5)
Неделя 3. Решение ОДУ второго порядка
Цель:
Цель: Изучение простого маятника с использованием теории MATLAB: Дифференциальные уравнения используются для представления различных явлений в технике. Большинство из них действительно являются нелинейными дифференциальными уравнениями. Простой маятник — это линейная система, представленная b: — Коэффициент демпфирования m: — Масса боба g: — Гравитационное ускорение L: — Длина… Блок клапанов двигателя внутреннего сгорания
Цель:
Цель: Изучение кулачкового механизма и следящего механизма. Теория: – Кулачковый толкатель представляет собой высший парный механизм. Их можно использовать для создания любого типа периодического движения толкателя от вращательного движения кулачка. Кулачковый толкатель представляет собой механизм с 3 стержнями. Список ссылок Link1:-Fixed Link Link2:Cam Link3:-Follower List of Contact Revolute Pair…
Теория: – Кулачковый толкатель представляет собой высший парный механизм. Их можно использовать для создания любого типа периодического движения толкателя от вращательного движения кулачка. Кулачковый толкатель представляет собой механизм с 3 стержнями. Список ссылок Link1:-Fixed Link Link2:Cam Link3:-Follower List of Contact Revolute Pair…
05 июля 2020 г. 13:10 IST
Подробнее
MBD Simulation on a Piston Assembly
Цель:
84
0404 :- Изучение изменения линейного смещения поршня с изменением эксцентриситета. Теория:- Коленчатый вал – это известный механизм, который используется для преобразования вращательного движения в поступательное или наоборот. Они находят свое основное применение в автомобильной промышленности внутри двигателей внутреннего сгорания. В ДВС при заряде(топливо+воздух)…
27 июня 2020 г. 09:15 IST
Подробнее
Планетарная передача
Цель:
Цель: – Изучение системы планетарной передачи.