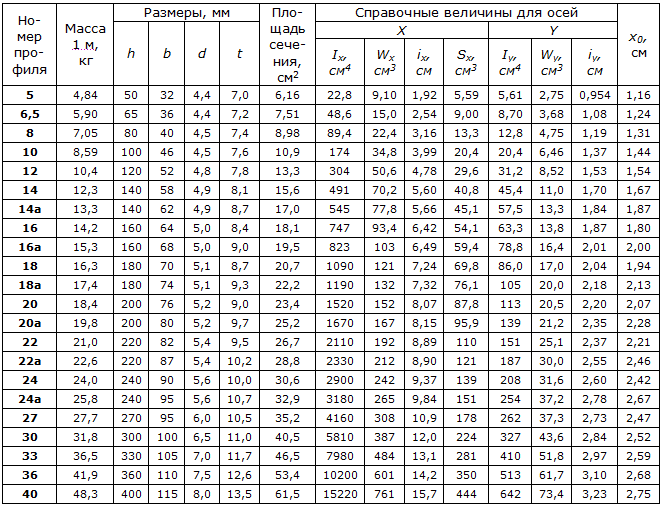
Сколько весит швеллер 14 1 метр: Купить швеллер 14, размеры швеллера, цена на швеллер 14 в Москве
alexxlab | 09.05.2023 | 0 | Разное
Правила плавания и меры безопасности
Все дети в возрасте 12 лет и младше должны носить PFD, утвержденный береговой охраной, на открытой палубе прогулочного катера, за исключением случаев, когда они стоят на якоре, пришвартованы или сели на мель. Есть четыре основные вещи, которые вы должны помнить о своих личных спасательных средствах.
Во-первых, у вас на борту должно быть по одному носимому устройству соответствующего размера на каждого человека в лодке или на каждого буксируемого человека. (Это относится к гребным лодкам, парусникам, каноэ и плотам, а также к моторным лодкам.)
Во-вторых, каждое устройство должно быть легко доступно. Их нельзя прятать под палубой или хранить в полиэтиленовых пакетах. Их следует носить или, по крайней мере, иметь под рукой, чтобы к ним можно было быстро добраться в экстренной ситуации.
В-третьих, каждое устройство должно быть одобрено Береговой охраной и иметь штамп и номер разрешения.
В-четвертых, каждое устройство должно быть в хорошем состоянии и соответствовать размеру человека, который будет его носить. Ремни должны быть прочно закреплены, не должно быть разрывов, разрывов или отверстий, которые могут повлиять на эффективность работы устройства, и не должно быть утечек в пластиковых пакетах с флотационным материалом (это можно проверить, сжав каждый пакет и прислушиваясь к выходящему воздуху.)
Ремни должны быть прочно закреплены, не должно быть разрывов, разрывов или отверстий, которые могут повлиять на эффективность работы устройства, и не должно быть утечек в пластиковых пакетах с флотационным материалом (это можно проверить, сжав каждый пакет и прислушиваясь к выходящему воздуху.)
Государственные и федеральные правила плавучести
Все лодки, включая каноэ и байдарки, должны быть оснащены одним носимым персональным спасательным средством для каждого человека на борту или для каждого человека, буксируемого на водных лыжах и т. д.
Лодки длиной 16 футов длина или более также должны быть оснащены одним PFD типа IV (бросаемым) на лодку на случай, если кто-то упадет за борт.
Надувные спасательные жилеты
Имеется широкий выбор надувных спасательных жилетов. Чтобы быть принятым в качестве одного из обязательных спасательных жилетов на борту, на устройстве должен быть штамп одобрения береговой охраны. Если он одобрен как тип V, его нужно носить, чтобы его приняли.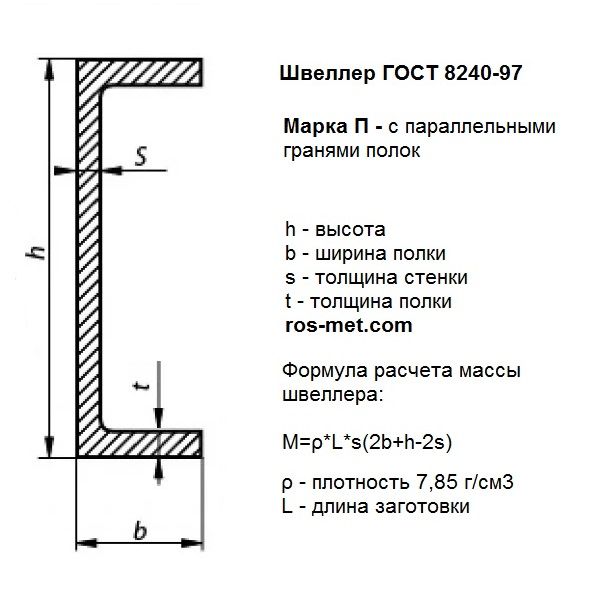 Надувные устройства любого типа не допускаются для лиц моложе 16 лет или для управления личным водным транспортом.
Надувные устройства любого типа не допускаются для лиц моложе 16 лет или для управления личным водным транспортом.
Лыжные ремни
Они не входят в утвержденный список спасательных средств и не рекомендуются для вашей безопасности. Лыжный ремень не может считаться одним из необходимых предметов снаряжения на борту любого судна. Во время катания на лыжах можно надевать лыжный ремень, но на буксирной лодке должно быть утвержденное спасательное средство для лыжника.
Индивидуальные спасательные средства (PFD) классифицируются по «Типам», указанным ниже:
- Тип I: Обладает наибольшей требуемой плавучестью и предназначен для поворота большинства находящихся без сознания людей в воде из положения лицом вниз в вертикальное или немного назад позиция. PFD типа I обеспечивает наибольшую защиту своему владельцу и наиболее эффективен для всех вод.
- Тип II: носимое устройство, предназначенное для поворота владельца в вертикальное положение или положение слегка назад в воде.
 Поворачивающее действие не такое выраженное, как у Type I, и устройство не повернет столько людей в тех же условиях, что и Type I.
Поворачивающее действие не такое выраженное, как у Type I, и устройство не повернет столько людей в тех же условиях, что и Type I. - Тип III: носимое устройство, разработанное таким образом, чтобы пользователи могли принять вертикальное положение или положение немного назад. Хотя Type III имеет такую же плавучесть, как и PFD Type II, он имеет небольшую способность поворота или вообще не имеет ее. Тип III выпускается в различных стилях, цветах и размерах. Многие из них предназначены для катания на водных лыжах, парусного спорта, охоты, рыбалки или других водных видов спорта. Некоторые устройства этого типа также обеспечат повышенную защиту от переохлаждения.
- Тип IV: устройство, предназначенное для того, чтобы его можно было бросить человеку в воду и схватить и удерживать до тех пор, пока пользователь не спасет его. Он не предназначен для ношения. Наиболее распространенными устройствами типа IV являются плавучая подушка и кольцевой спасательный круг.
- Тип V: любой PFD, одобренный для ограниченного использования.
 Утвержденные плавсредства, которые являются частично или полностью надувными, должны быть надеты, чтобы их признали законными.
Утвержденные плавсредства, которые являются частично или полностью надувными, должны быть надеты, чтобы их признали законными.
Приемлемые плавсредства должны соответствовать следующим условиям:
- Они должны иметь маркировку , утвержденную Береговой охраной.
- Они должны быть в хорошем и исправном состоянии
- Они должны быть подходящего размера для человека, который собирается их носить
- Носимые PFD должны быть легко доступны
- Метательные устройства должны быть немедленно доступны для использования.
RuntimeError: заданные группы = 1, вес размера [64, 3, 7, 7], ожидаемый ввод [3, 1, 224, 224] будет иметь 3 канала, но вместо этого получен 1 канал — зрение
Форумы PyTorchМона_Джалал (Мона Джалал)
1
Я видел пару таких сообщений на форуме, но мне трудно обобщить их на свою проблему. Вот ошибка:
Вот ошибка:
torch.Size([3, 1, 224, 224]) Traceback (последний последний вызов): Файл "test_loocv.py", строка 245, ввывод = model_ft (test_data) Файл "/scratch/sjn-p3/anaconda/anaconda3/lib/python3.6/site-packages/torch/nn/modules/module.py", строка 477, в __call__ результат = self.forward(*input, **kwargs) Файл "/scratch/sjn-p3/anaconda/anaconda3/lib/python3.6/site-packages/torchvision-0.2.1-py3.6.egg/torchvision/models/resnet.py", строка 139., вперед Файл "/scratch/sjn-p3/anaconda/anaconda3/lib/python3.6/site-packages/torch/nn/modules/module.py", строка 477, в __call__ результат = self.forward(*input, **kwargs) Файл "/scratch/sjn-p3/anaconda/anaconda3/lib/python3.6/site-packages/torch/nn/modules/conv.py", строка 301, вперед self.padding, self.dilation, self.groups) RuntimeError: заданные группы = 1, вес размера [64, 3, 7, 7], ожидаемый ввод [3, 1, 224, 224] будет иметь 3 канала, но вместо этого получен 1 канал
и вот весь код:
из __future__ import print_function, подразделение импортный факел из torch.autograd импортировать переменную импортный факел импортировать torch.nn как nn импортировать torch.optim как optim из torch.optim импортировать lr_scheduler импортировать numpy как np импорт из torchvision импортировать наборы данных, модели, преобразования импортировать matplotlib.pyplot как plt время импорта импорт ОС импортировать копию импортировать torch.utils.data как data_utils из torch.utils импортировать данные data_transforms = { 'поезд': преобразовывает.Compose([ преобразования.RandomResizedCrop(224), преобразования.RandomHorizontalFlip(), преобразовывает.RandomRotation(20), преобразовывает.ToTensor(), transforms.Normalize([0,485, 0,456, 0,406], [0,229, 0,224, 0,225]) ]) } data_dir = "тестовые_изображения" устройство = torch.device("cuda:0", если torch.cuda.is_available(), иначе "процессор") def imshow (inp, title = None): """Имшоу для Тензора.""" inp = inp.numpy().транспонировать((1, 2, 0)) среднее значение = np.массив ([0,485, 0,456, 0,406]) стандартное значение = np.
массив ([0,229, 0,224, 0,225]) вх = стандарт * вх + среднее вход = np.clip (вход, 0, 1) plt.imshow (ввод) если title не None: plt.title(название) plt.pause(0.001) # небольшая пауза для обновления графиков def train_model (модель, критерий, оптимизатор, планировщик, загрузчик данных, num_epochs = 25): так как = время.время() best_model_wts = copy.deepcopy(model.state_dict()) лучший_акк = 0.0 для эпохи в диапазоне (num_epochs): print('Эпоха {}/{}'.format(эпоха, num_epochs - 1)) печать('-' * 10) # Каждая эпоха имеет этап обучения и проверки для фазы ['поезд']: если фаза == 'поезд': планировщик.шаг() model.train() # Установить модель в режим обучения еще: model.eval() # Установить модель в режим оценки текущая_потеря = 0,0 run_corrects = 0 # Перебираем данные. #для входных данных, метки в загрузчиках данных[фаза]: для входов, метки в загрузчике данных: входы = входы. к(устройство) labels = labels.to(устройство) # обнуляем градиенты параметров оптимизатор.zero_grad() # вперед # отслеживать историю, если только в поезде с torch.set_grad_enabled (фаза == 'поезд'): выходы = модель (входы) _, preds = torch.max(выходы, 1) потеря = критерий (выходы, метки) # назад + оптимизация только в фазе обучения если фаза == 'поезд': потеря.назад() оптимизатор.шаг() # статистика running_loss += loss.item() * inputs.size(0) running_corrects += torch.sum(preds == labels.data) epoch_loss = текущие_потери / dataset_sizes[фаза] epoch_acc = running_corrects.double() / dataset_sizes[фаза] print('{} Loss: {:.4f} Acc: {:.4f}'.format( фаза, epoch_loss, epoch_acc)) # глубокая копия модели # если фаза == 'val' и epoch_acc >
best_acc: # best_acc = эпоха_acc # best_model_wts = copy. deepcopy(model.state_dict()) Распечатать() time_elapsed = time.time() - с print('Обучение завершено в формате {:.0f}m {:.0f}s'.format( time_elapsed // 60, time_elapsed % 60)) # print('Лучшее значение Acc: {:4f}'.format(best_acc)) # model.load_state_dict(best_model_wts) модель возврата def visualize_model (модель, num_images = 6): was_training = модель.обучение модель.eval() images_so_far = 0 рис = plt.figure() с факелом.no_grad(): #for i (входные данные, метки) в enumerate(dataloaders['test]): для i (входы, метки) в перечислении (загрузчики данных ['поезд']): входы = входы.к(устройство) labels = labels.to(устройство) выходы = модель (входы) _, preds = torch.max(выходы, 1) для j в диапазоне (inputs.size()[0]): images_so_far += 1 ax = plt.subplot(num_images//2, 2, images_so_far) топор.ось('выкл') ax.set_title('прогнозировано: {}'.
format(class_names[preds[j]])) imshow(inputs.cpu().data[j]) если images_so_far == num_images: model.train (режим = was_training) возвращаться model.train (режим = was_training) ################################################### ##################### # Тонкая настройка коннета # ---------------------- # # Загрузите предварительно обученную модель и сбросьте окончательный полносвязный слой. # #model_ft = models.resnet18 (предварительно обученный = Истина) model_ft = models.resnet50 (предварительно обученный = Истина) num_ftrs = model_ft.fc.in_features model_ft.fc = nn.Linear(num_ftrs, 2) model_ft = model_ft.to(устройство) критерий = nn.CrossEntropyLoss() # Обратите внимание, что все параметры оптимизируются optimizer_ft = optim.SGD(model_ft.parameters(), lr=0,001, импульс=0,9) # Затухание LR на коэффициент 0,1 каждые 7 эпох exp_lr_scheduler = lr_scheduler.StepLR (optimizer_ft, step_size = 7, гамма = 0,1) #model_ft = model_ft.
cuda() nb_samples = 10 nb_классы = 2 data_transforms = { 'поезд': преобразовывает.Compose([ преобразования.RandomResizedCrop(224), преобразования.RandomHorizontalFlip(), преобразовывает.RandomRotation(20), преобразовывает.ToTensor(), transforms.Normalize([0,485, 0,456, 0,406], [0,229, 0,224, 0,225]) ]) } '''val_loader = data.DataLoader( image_datasets['поезд'], количество_работников=2, размер партии = 1 ) val_loader = iter(val_loader)''' image_datasets = {x: наборы данных.ImageFolder(os.path.join(data_dir, x), data_transforms[x]) для x в ['поезд']} dataset_sizes = {x: len(image_datasets[x]) для x в ['train']} class_names = image_datasets['train'].classes # LOOCV loocv_preds = [] loocv_targets = [] для idx в диапазоне (nb_samples): print('Использование примера {} в качестве тестовых данных'.format(idx)) # Получить все индексы и удалить тестовую выборку train_indices = список (диапазон (len (image_datasets ['train']))) del train_indices[idx] # Создать новый сэмплер сэмплер = данные. 
SubsetRandomSampler(train_indices) загрузчик данных = data.DataLoader( image_datasets['поезд'], количество_работников=2, размер партии = 1, сэмплер = сэмплер ) # Модель поезда для batch_idx (образцы, цель) в перечислении (загрузчик данных): print('Пакет {}'.format(batch_idx)) model_ft = train_model(model_ft, критерий, optimizer_ft, exp_lr_scheduler, dataloader, num_epochs=2) # добавить сюда эту строку? # Тест на образце LOO model_ft.eval() test_data, test_target = image_datasets['train'][idx] test_data = test_data.cuda() #test_target = test_target.cuda() test_target = факел.tensor (test_target) test_target = test_target.cuda() test_data.unsqueeze_(1) test_target.unsqueeze_(0) печать (test_data.shape) вывод = model_ft (test_data) pred = torch.argmax (выход, 1) loocv_preds.append(пред) loocv_targets.append(test_target.item())
Как показано выше, test_data имеет вид: torch. Size([3, 1, 224, 224])
Size([3, 1, 224, 224])
1 Нравится
deJQK
2
Почему вы распаковываете измерение 1 для тестовых данных? В сообщении об ошибке говорится, что ввод должен иметь размер [b, 3, w, h], но у вас [3, 1, 224, 224], поэтому он не принимает его. Попробуйте использовать транспонирование, чтобы изменить первые два измерения.
Мона_Джалал (Мона Джалал)
3
спасибо за ответ. Если я прокомментирую части сжатия, я получу другую ошибку. Не могли бы вы написать код для правильного транспонирования? Кроме того, мне в конечном итоге нужна часть сжатия или нет?
Весь код можно увидеть здесь https://pastebin. com/8p51Zz2A
com/8p51Zz2A
Обучение завершено за 0 м 1 с факел.Размер([3, 224, 224]) Traceback (последний последний вызов): Файл "test_loocv.py", строка 244, ввывод = model_ft (test_data) Файл "/scratch/sjn-p3/anaconda/anaconda3/lib/python3.6/site-packages/torch/nn/modules/module.py", строка 477, в __call__ результат = self.forward(*input, **kwargs) Файл "/scratch/sjn-p3/anaconda/anaconda3/lib/python3.6/site-packages/torchvision-0.2.1-py3.6.egg/torchvision/models/resnet.py", строка 139., вперед Файл "/scratch/sjn-p3/anaconda/anaconda3/lib/python3.6/site-packages/torch/nn/modules/module.py", строка 477, в __call__ результат = self.forward(*input, **kwargs) Файл "/scratch/sjn-p3/anaconda/anaconda3/lib/python3.6/site-packages/torch/nn/modules/conv.py", строка 301, вперед self.padding, self.dilation, self.groups) RuntimeError: ожидался 4-мерный ввод для 4-мерного веса [64, 3, 7, 7], но вместо этого был получен ввод размера [3, 224, 224]
Код:
model_ft.eval() test_data, test_target = image_datasets['train'][idx] test_data = test_data.cuda() #test_target = test_target.cuda() test_target = факел.tensor (test_target) test_target = test_target.cuda() ##test_data.unsqueeze_(1) ##test_target.unsqueeze_(0) печать (test_data.shape) вывод = model_ft (test_data)
1 Нравится
deJQK
4
test_data.unsqueeze_(0)
1 Нравится
Солнце352 (Чжаоман Сунь)
5
Ваши входные изображения имели только один канал , что не соответствует трехканальному изображению RGB в сети ResNet50. Вы должны изменить входной диммер в ResNet50 или преобразовать ваши изображения в три канала.
Вы должны изменить входной диммер в ResNet50 или преобразовать ваши изображения в три канала.
Мона_Джалал (Мона Джалал)
6
, потому что у меня было только одно или два моих изображения, поэтому я исправил их вручную:
import cv2
импортировать numpy как np
img = cv2.imread('110249.jpg')
серый = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
img2 = np.zeros_like (img)
img2[:,:,0] = серый
img2[:,:,1] = серый
img2[:,:,2] = серый
cv2.imwrite('110249.jpg', img2)
2 лайков
Silva_Rubanza (Сильва Рубанза)
7
Я пробовал вышеописанное, но все еще получаю «данные группы = 1, вес размера [64, 3, 7, 7], ожидаемый ввод [4, 1, 224, 224], чтобы иметь 3 канала, но получил 1 канал вместо этого».
Вы нашли другой способ сделать это?
Это моя модель арки.
1 Нравится
(Алекс Вюти)
8
Каковы размеры вашего ввода [4, 1, 224, 224] ? Они должны быть NCHW (размер партии, количество каналов, высота, ширина).
Если это так, то это означает, что у вас есть 4 примера в пакете, 1 канал (изображение в оттенках серого) и изображения 224×224. Если вы хотите, чтобы код работал, вам нужно либо изменить ввод, чтобы иметь 3 канала (дублировать серый канал для RGB), либо изменить модель, чтобы принимать 1-канальные изображения. Для второго решения вам необходимо изменить код модели (например, скопировав исходный код в свою собственную кодовую базу и изменив то, что вам нужно).
Как видно из исходного кода Densenet, первая свертка ожидает 3 канала в качестве входных данных.
2 лайков
(Джитиндра Фартиял)
9
Я столкнулся с той же проблемой, и Алекс все правильно объяснил.
Используйте это, чтобы преобразовать [H,W,C] в [C,H,W]
Для включения batch_size(N) используйте DataLoader, он автоматически включит
изображение = изображение.транспонировать((2, 0, 1))
3 лайков
(Джим Гитонга)
10
у меня сработал этот
Venkatesh_Ragavan (Венкатеш Рагаван)
11
Данные группы = 1, вес размера 64 1 7 7, ожидается, что input[64, 3, 160, 160] будет иметь 1 канал, но вместо этого получили 3 канала
Я получаю указанную выше ошибку даже при предоставлении 3 входных каналов.
Это код моей архитектуры.
класс Dnet_1ch(nn.Module):
def __init__(self, arch=arch, n=unique, pre=True, ps=0.5):
супер().__инит__()
m = arch(True), если pre else arch()
conv = nn.Conv2d(3, 64, kernel_size=5, шаг=2, заполнение=3, смещение=ложь)
w = (m.features.conv0.weight.sum(1)).unsqueeze(1)
conv.weight = nn.Parameter(w)
self.layer0 = nn.Sequential(conv, m.features.norm0, nn.ReLU(inplace=True))
self.layer1 = nn.Sequential(
nn.MaxPool2d (kernel_size = 3, шаг = 2, отступ = 1, расширение = 1, ceil_mode = False),
m.features.denseblock1)
self.layer2 = nn.Sequential (m.features.transition1, m. features.denseblock2)
self.layer3 = nn.Sequential (m.features.transition2, m.features.denseblock3)
self.layer4 = nn.Sequential (m.features.transition3, m.features.denseblock4,
м.характеристики.норма5)
nc = self.layer4[-1].weight.shape[0]
self.head1 = Голова (nc, n)
#to_Mish(self.layer0), to_Mish(self.layer1), to_Mish(self.layer2)
#to_Mish(self.layer3), to_Mish(self.layer4)
защита вперед (я, х):
х = self.layer0 (х)
х = self.layer1 (х)
х = self.layer2 (х)
х = self.layer3 (х)
х = self.layer4 (х)
x1 = self.head1(x)
возврат x1
features.denseblock2)
self.layer3 = nn.Sequential (m.features.transition2, m.features.denseblock3)
self.layer4 = nn.Sequential (m.features.transition3, m.features.denseblock4,
м.характеристики.норма5)
nc = self.layer4[-1].weight.shape[0]
self.head1 = Голова (nc, n)
#to_Mish(self.layer0), to_Mish(self.layer1), to_Mish(self.layer2)
#to_Mish(self.layer3), to_Mish(self.layer4)
защита вперед (я, х):
х = self.layer0 (х)
х = self.layer1 (х)
х = self.layer2 (х)
х = self.layer3 (х)
х = self.layer4 (х)
x1 = self.head1(x)
возврат x1
Вы можете понять, в чем проблема?
птрблк
12
Вы устанавливаете входные каналы первой свертки в один канал в этих строках кода:
conv = nn.Conv2d(3, 64, kernel_size=5, шаг=2, заполнение=3, смещение=ложь) w = (m.features.conv0.weight.sum(1)).unsqueeze(1) conv.weight = nn.Parameter(w)
при прохождении входа с 3 каналами.
Либо оставьте свертку как есть с in_channels=3 , либо измените количество каналов во входном тензоре на один канал, например. путем нарезки.
1 Нравится
Венкатеш_Рагаван (Венкатеш Рагаван)
13
Спасибо за ответ. Я исправил это.
Венкатеш_Рагаван (Венкатеш Рагаван)
14
Когда обычно возникает «Ошибка CUDA: сработало утверждение на стороне устройства»?
код
15
Обычно при нарушении оператора assert .
напр. если вы используете nn.NLLLoss в качестве критерия и передаете цель с выходящими за пределы значениями, эта строка кода вызовет эту проблему.
Обратите внимание, что операции CUDA являются асинхронными, поэтому всякий раз, когда вы сталкиваетесь с ошибкой при работе с CUDA, я бы посоветовал убедиться, что код работает нормально с использованием ЦП (так как это может дать вам лучшее сообщение об ошибке), и если это так, запустите код с CUDA_LAUNCH_BLOCKING=1 python script.py args .
Венкатеш_Рагаван (Венкатеш Рагаван)
16
Спасибо за помощь. Я исправил это.
Я исправил это.
Умаир_Джаваид (Умайр Джавид)
17
data_preprocess = transforms.Compose([
#transforms.RandomResizedCrop(224),
преобразовывает.ToTensor(),
transforms.Normalize([0,485, 0,456, 0,406], [0,229, 0,224, 0,225])
])
определение preprocess_input (изображение): х = data_preprocess (изображение) вернуть x.unsqueeze_(0).to(устройство)
def display_img_pred_and_heatmap (путь, модель, метка = нет):
original_img = cv.imread (путь)
original_img = cv.resize (original_img, (224 224))
#print("original_img: " , original_img.shape)
row_size = original_img.shape[0]
col_size = original_img.shape[1]
plt.imshow (cv.cvtColor (original_img, cv.COLOR_BGR2RGB))
plt. show()
preprocessed_img = preprocess_input (исходное_img)
sub_model = nn.Sequential(*list(model.children())[:-1])
печать("под_модель: ",под_модель)
print("sub_model(preprocessed_img).shape: ",sub_model(preprocessed_img).shape)
show()
preprocessed_img = preprocess_input (исходное_img)
sub_model = nn.Sequential(*list(model.children())[:-1])
печать("под_модель: ",под_модель)
print("sub_model(preprocessed_img).shape: ",sub_model(preprocessed_img).shape)
Я получаю аналогичную ошибку, когда пытаюсь получить вывод с промежуточного уровня. Я не получаю никаких ошибок, когда пытаюсь получить вывод из полной модели. Как мне это исправить?
RuntimeError: заданные группы = 1, вес размера [1024, 512, 3, 3], ожидаемый ввод [1, 200, 14, 14] будет иметь 512 каналов, но вместо этого получил 200 каналов
Обновление: Я не получаю никаких ошибок при изменении sub_model = nn.Sequential(*list(model.children())[:-1]) на sub_model = nn.Sequential(*list(model.children())[:-6])
Это моя модель:
class myModel5(nn.Module):
def __init__(self, features, num_classes=200, **kwargs):
супер(моя модель5, я).__init__()
self. features = особенности
self.conv6 = nn.Conv2d(512, 1024, размер_ядра=3, заполнение=1)
self.conv7 = nn.Conv2d(1024, num_classes, kernel_size=1)
self.conv8 = nn.Conv2d(512, 1024, kernel_size=3, padding=1)
self.conv9 = nn.Conv2d(1024, num_classes, kernel_size=1)
self.relu = nn.ReLU(inplace=False)
self.avgpool = nn.AdaptiveAvgPool2d(1)
#self.fc = nn.Linear(1024, num_classes)
initialize_weights (self.modules (), init_mode = 'он')
def forward(self, x, labels=None, return_cam=False):
batch_size = x.shape[0]
x1 = собственные функции (x)
x1 = самовыражение6(x1)
x1 = самоотношение (x1)
x1 = самовыражение7(x1)
x1 = самоотношение (x1)
x2 = собственные функции (x)
x2 = самоутверждение8(x2)
x2 = самоотношение (x2)
x2 = самовыражение9(x2)
x2 = самоотношение (x2)
х = х1 + х2
features = особенности
self.conv6 = nn.Conv2d(512, 1024, размер_ядра=3, заполнение=1)
self.conv7 = nn.Conv2d(1024, num_classes, kernel_size=1)
self.conv8 = nn.Conv2d(512, 1024, kernel_size=3, padding=1)
self.conv9 = nn.Conv2d(1024, num_classes, kernel_size=1)
self.relu = nn.ReLU(inplace=False)
self.avgpool = nn.AdaptiveAvgPool2d(1)
#self.fc = nn.Linear(1024, num_classes)
initialize_weights (self.modules (), init_mode = 'он')
def forward(self, x, labels=None, return_cam=False):
batch_size = x.shape[0]
x1 = собственные функции (x)
x1 = самовыражение6(x1)
x1 = самоотношение (x1)
x1 = самовыражение7(x1)
x1 = самоотношение (x1)
x2 = собственные функции (x)
x2 = самоутверждение8(x2)
x2 = самоотношение (x2)
x2 = самовыражение9(x2)
x2 = самоотношение (x2)
х = х1 + х2
футцдав
18
Ну, вы просите его передать вывод conv7 в conv8 , что явно непреднамеренно. Так что подумайте, чем вы на самом деле хотите заниматься.
Умаир_Джаваид (Умайр Джавид)
19
Как тогда получить выходные данные conv7 и conv9 ?
футцдав
20
Есть много способов сделать это, один из них
submodel = nn.Sequential( модель.
