Станок чпу своими руками схема чертежи: Изготовление чпу фрезерного станка своими руками. Станок чпу своими руками схема чертежи Как сделать чпу станок чертежи
alexxlab | 09.07.2023 | 0 | Разное
Самодельный фрезерный станок с ЧПУ своими руками. Чертежи и схемы
Это руководство покажет вам, как я создал свой самодельный фрезерный станок с ЧПУ. Я знаю, что у многих людей нет знаний или инструментов для создания цельнометаллического станка. Я все еще думаю и надеюсь, что это руководство вдохновит вас на создание собственной машины. Я включаю все необходимые шаги, которые я прошел при проектировании и сборке этого фрезерного станка с ЧПУ.
Шаг 1: Дизайн и CAD-модель
Самодельный фрезерный станок. CAD Модель 1Самодельный фрезерный станок. CAD Модель 2Все начинается с продуманного дизайна. Он поможет вам понять процесс создания машины с использованием параметрического CAD-моделирования.
В начале проекта необходимо создать несколько эскизов, чтобы понять размеры и форму машины. После этого появляется модель САПР, которая может быть создана в SolidWorks. Это позволяет вам создавать модель машины с множеством деталей, которые должны точно соответствовать друг другу.
Samodelnyj-frezernyj-stanok-s-chpu-osnovnye-razmeryСкачать
После того, как все детали были смоделированы, необходимо создать технические чертежи. Эти чертежи позволяют обработать все нестандартные детали на ручном токарном и фрезерном станке.
Важным аспектом проектирования машины является упрощение технического обслуживания и возможности регулировки станка. Для этого можно интегрировать подшипники в машину, но лучше разместить их в отдельных подшипниковых блоках, чтобы при необходимости их можно было заменить.
Кроме того, поддержание машины в чистоте является очень важным аспектом. Для обеспечения этого все направляющие должны быть доступны. Например, если вам нужно освободить ось X, вы можете отсоединить некоторые защитные пластины.
Надеемся, что наше руководство поможет вам создать лучшую машину и обеспечить ее долговечность и производительность.
Шаг 2: Рама
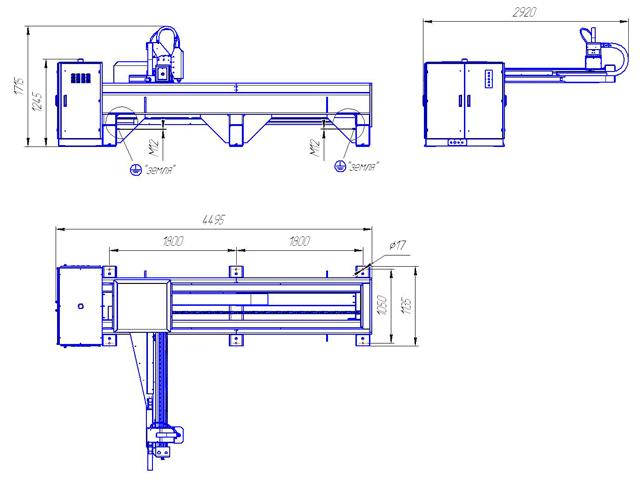
Самодельный фрезерный станок должен иметь жесткую основу, созданную из рамы, которая обеспечивает не только удобное размещение в мастерской, но и эффективную работу.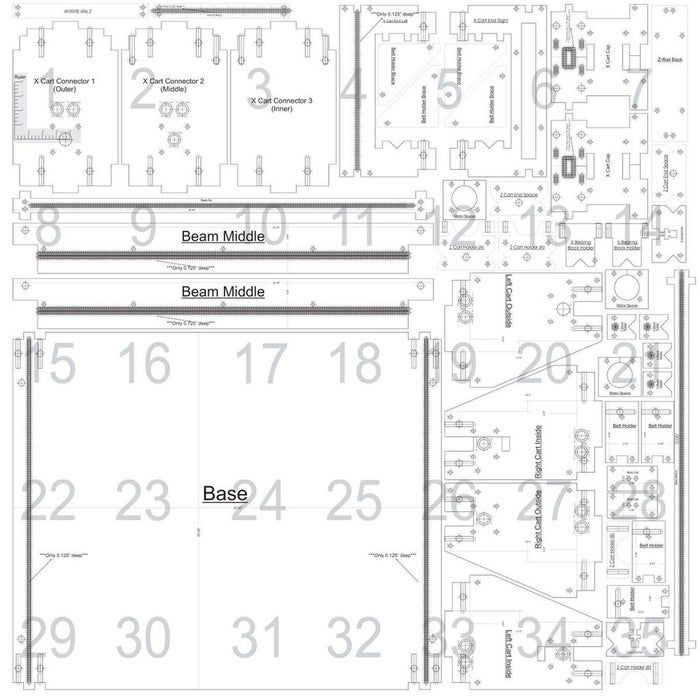 Для крепления портала к раме используются направляющие, которые затем устанавливаются на рабочую поверхность. В раме также находятся шаговый двигатель и шпиндель для оси X.
Для крепления портала к раме используются направляющие, которые затем устанавливаются на рабочую поверхность. В раме также находятся шаговый двигатель и шпиндель для оси X.
Zadnyaya-torcevaya-plastinaСкачать
Krepezhnye-elementy-vnutrennej-ramkiСкачать
Osnovnoj-profil-80h50-mmСкачать
Pylezashhitnyj-profilСкачать
T-obraznaya-gajkaСкачать
Torcevoj-profil-vnutrennej-ramki-40h50-mmСкачать
Torcevye-zashhitnye-nakladkiСкачать
Frontalnaya-torcevaya-platinaСкачать
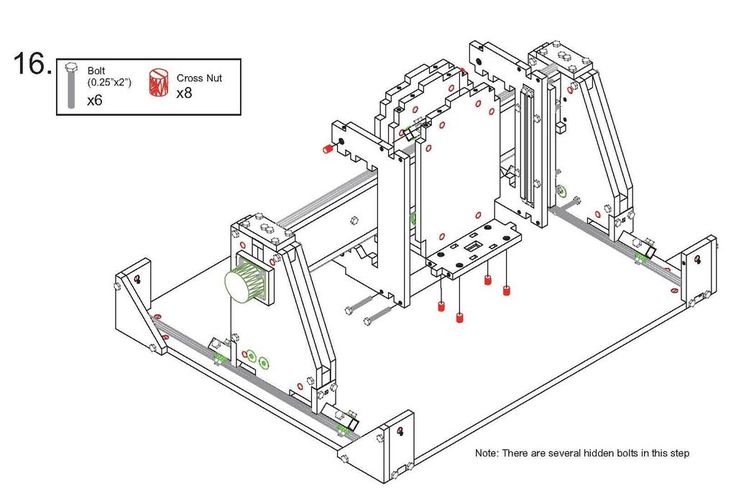
Рама была построена из двух профилей Maytec размером 40×80 мм, двух торцевых пластин толщиной 10 мм из алюминия, 4 уголков и квадратных элементов конструкции. Все профили были распилены под прямым углом и точно фрезерованы. С помощью болтов тяжелая рама, состоящая из угловых частей, была скреплена на месте. Квадратная рама, сделанная из меньших профилей, была смонтирована на внутренней стороне профилей Maytec с помощью 4 фрезерованных блоков из алюминия.
Поскольку рама находится под рабочей поверхностью, пыль может попасть на направляющие. Чтобы избежать этого, были созданы пылезащитные кожухи и установлены вокруг направляющих. Угловой профиль крепится к раме Maytec с помощью латунных Т-образных гаек, а алюминиевые пластины толщиной 2 мм устанавливаются в фрезерованные карманы на торцевых пластинах.
Чтобы избежать этого, были созданы пылезащитные кожухи и установлены вокруг направляющих. Угловой профиль крепится к раме Maytec с помощью латунных Т-образных гаек, а алюминиевые пластины толщиной 2 мм устанавливаются в фрезерованные карманы на торцевых пластинах.
На обеих концевых плитах установлены подшипниковые блоки для шпинделя. Они были вручную фрезерованы и обточены с правильными допусками. На передней торцевой пластине были профрезерованы пазы для установки шагового двигателя.
Blok-podshipnikovСкачать
Bokovoj-profil-vnutrennej-ramki-40h50-mmСкачать
Шаг 3: Портал
Портальный фрезерный станок представляет собой устройство, которое соединяет направляющие оси X и поддерживает фрезерный двигатель над заготовкой. Чем выше расположен портал, тем толще может быть заготовка. Однако, при использовании высокого портала есть недостаток — он работает как рычаг на направляющих, и боковые пластины имеют тенденцию легче изгибаться, что делает их длиннее.
Большая часть работы, которую я планировал выполнить на ЧПУ, включала фрезерование алюминиевых деталей.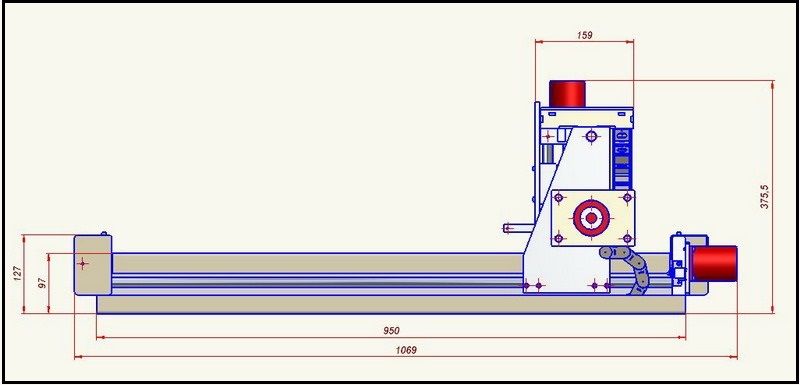 Средняя высота тисков для станка составляет 60 мм. Так как самые толстые алюминиевые блоки, которые я могу использовать, имеют высоту 60 мм, я выбрал расстояние между рабочей поверхностью и заготовкой, равное 125 мм. Это дало мне отправную точку для расположения боковых пластин под углом. Центр концевой фрезы должен быть над центром каретки (если смотреть со стороны станка), поэтому мне пришлось расположить боковые пластины под углом. Solidworks помог мне преобразовать все измерения в окончательные детали. Из-за всех сложных размеров я решил фрезеровать эти детали на промышленном фрезерном станке с ЧПУ, что также дало мне возможность скруглить все углы (было бы очень сложно фрезеровать на ручном фрезерном станке).
Средняя высота тисков для станка составляет 60 мм. Так как самые толстые алюминиевые блоки, которые я могу использовать, имеют высоту 60 мм, я выбрал расстояние между рабочей поверхностью и заготовкой, равное 125 мм. Это дало мне отправную точку для расположения боковых пластин под углом. Центр концевой фрезы должен быть над центром каретки (если смотреть со стороны станка), поэтому мне пришлось расположить боковые пластины под углом. Solidworks помог мне преобразовать все измерения в окончательные детали. Из-за всех сложных размеров я решил фрезеровать эти детали на промышленном фрезерном станке с ЧПУ, что также дало мне возможность скруглить все углы (было бы очень сложно фрезеровать на ручном фрезерном станке).
Часть, поддерживающая направляющие оси Y, изготовлена из U-образного профиля толщиной 5 мм. Он монтируется между боковой пластиной с помощью двух простых монтажных блоков. Внутри U-образного профиля находится шпиндель оси Y, который также поддерживается блоками подшипников, используемых для поддержки оси X.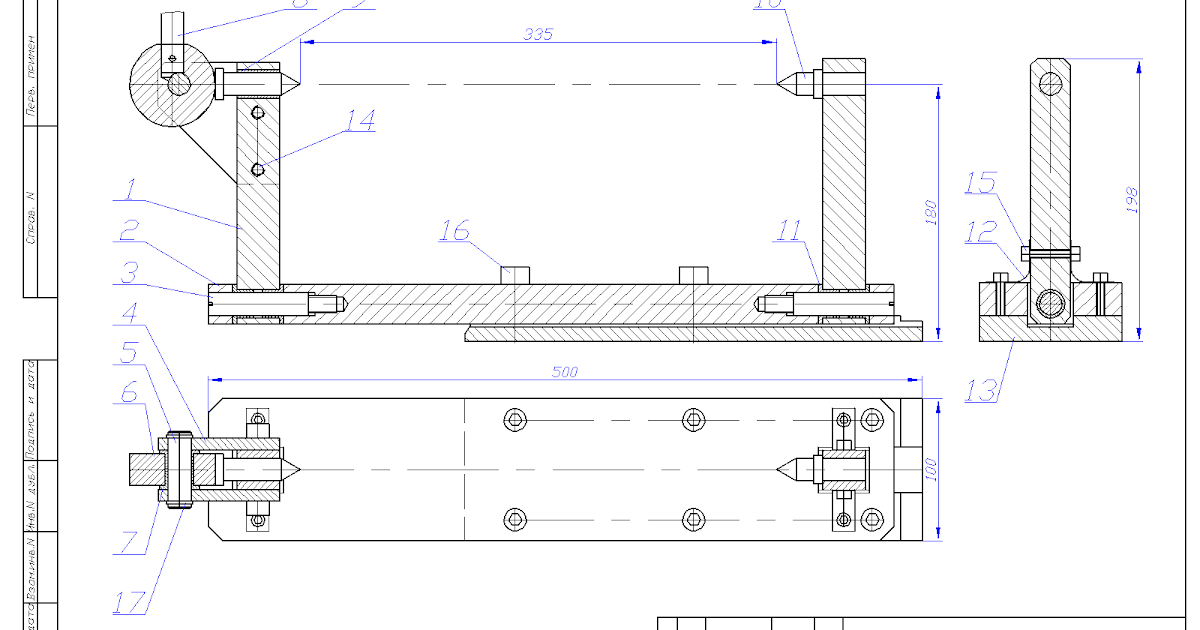 Эти блоки крепятся с внешней стороны боковых пластин.
Эти блоки крепятся с внешней стороны боковых пластин.
Под основной рамой на нижней стороне боковых пластин портала была установлена пластина, которая обеспечивает точку крепления гайки шпинделя по оси Х.
U-obraznyj-verhnij-profil-portalaСкачать
Bokovye-stojki-portalaСкачать
Koepleniya-dlya-U-obraznogo-profilyaСкачать
Nizhnyaya-poperechnaya-plastina-portala-s-krepleniem-privodnoj-gajkiСкачать
Kreplenie-dvigatelya-osi-YСкачать
Шаг 4: Корпус шагового двигателя по оси Z
Для шагового двигателя по оси Z был изготовлен корпус, состоящий из передней пластины, двух усилительных пластин, опоры двигателя и задней пластины. На передней пластине установлены две линейные направляющие для оси Z, на которые закреплена монтажная плита для фрезерного двигателя с каретками.
Для крепления двигателя был использован подшипник для шпинделя оси Z, поэтому блок подшипников для этого шпинделя не был использован. Нижний конец шпинделя поддерживается монтажной пластиной для фрезерного двигателя.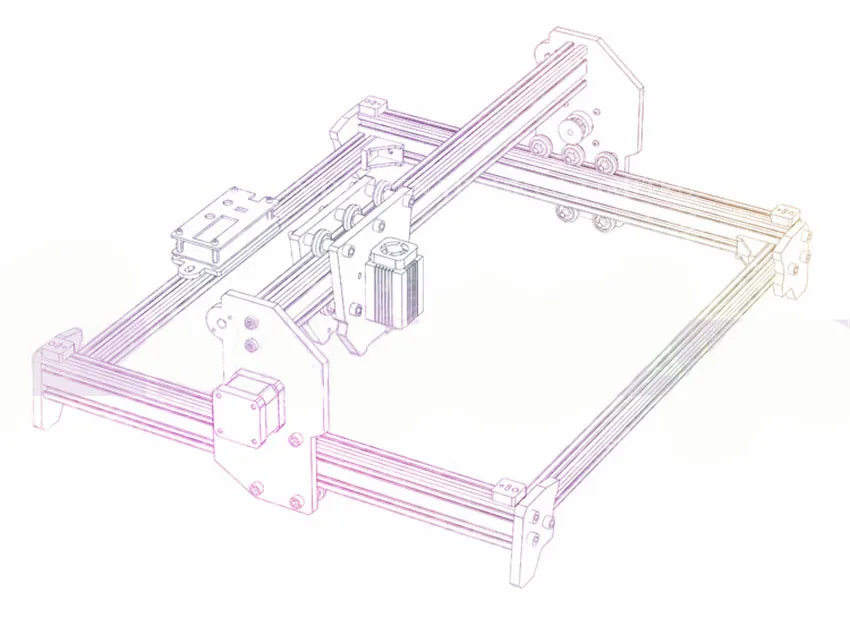 Гайка шпинделя для оси Z прикручена непосредственно к монтажной плите фрезерного двигателя.
Гайка шпинделя для оси Z прикручена непосредственно к монтажной плите фрезерного двигателя.
Задняя пластина обеспечивает место для установки гайки шпинделя оси Y, которая монтируется внутри. Все необходимые крепления были установлены на кастомных механизмах, которые были изготовлены. ЧПУ было собрано с направляющими, шпинделями и множеством крепежных элементов.
Lozhement-frezernogo-shpindelyaСкачать
Nizhnyaya-i-srednyaya-plastiny-osi-ZСкачать
Plastina-dlya-krepleniya-frezernogo-shpindelya-na-osi-ZСкачать
Plastinna-dlya-krepleniya-gajki-peremeshheniya-po-osi-YСкачать
Perednyaya-plastina-osi-Z-dlya-krepleniya-linejnyh-napravlyajushhihСкачать
Verhnyaya-plastina-osi-Z-dlya-krpeleniya-shagovogo-dvigatelyaСкачать
Zadnyaya-plastina-osi-ZСкачать
Шаг 5: Направляющие
Чтобы обеспечить движение концевых фрез в трех направлениях, направляющие станка используются для направления их движения. Эти направляющие обеспечивают жесткость машины во всех направлениях.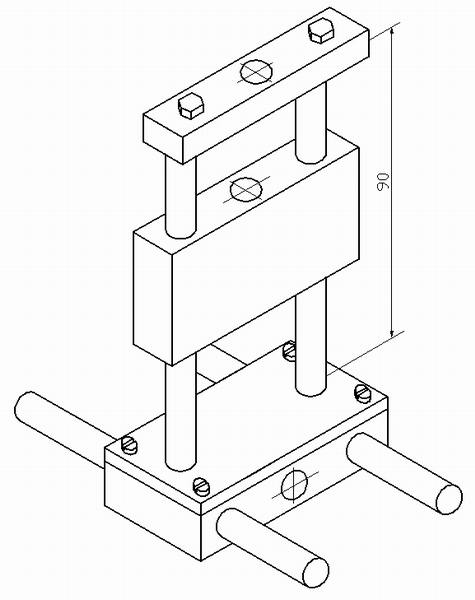 Желательно, чтобы они позволяли машине двигаться только в предпочтительном направлении, так как любой люфт в других направлениях может привести к неточности обработки заготовок.
Желательно, чтобы они позволяли машине двигаться только в предпочтительном направлении, так как любой люфт в других направлениях может привести к неточности обработки заготовок.
Для своего станка я выбрал направляющие, которые опираются на всю длину рельса, чтобы снизить риск прогиба на более длинных осях. Я считаю, что некоторые направляющие для кухонных ящиков предпочтительнее, чем стержни из закаленной стали, которые поддерживаются только на концах и могут прогибаться. Поскольку концевые фрезы постоянно борются с силами против материала заготовки, требуется большая поддержка.
Я выбрал самый дорогой вариант — профилированные линейные направляющие с каретками, предназначенные для приема сил во всех направлениях. На третьем фото можно увидеть шарики петель, они расположены по обеим сторонам профиля и установлены под углом 45 градусов друг к другу, чтобы обеспечить высокую нагрузку.
Чтобы все направляющие были перпендикулярны и параллельны друг другу, все они были выровнены с помощью циферблатного индикатора с максимальной разницей в 0,01 мм. Если вы потратите время на эту часть, ваша машина будет работать очень точно!
Если вы потратите время на эту часть, ваша машина будет работать очень точно!
Шаг 6: Шпиндели и шкивы
Шаговые двигатели преобразуют вращательное движение в линейное движение шпинделей. Выбрав одну из трех различных версий при сборке машины — ходовые или шариковые винты в метрической или имперской конфигурации, вы сможете определить точность и трение механизма. Ходовые винты часто имеют большое трение и меньшую точность, в отличие от шариковых винтов, которые гарантируют отсутствие люфта и высокую точность. Тем не менее, они довольно дороги.
Для идеальной подгонки концов осей X и Y к подшипникам, шкивам и зажимным гайкам, необходимо их повернуть до нужного размера. Ось Z шпинделя поддерживается только с одной стороны и имеет подшипник, что позволяет ей вращаться только с одной стороны.
Шкивы обрабатываются до размера точеного вала (8 мм в моем случае) и имеют установочный винт M4, расположенный перпендикулярно отверстию вала.
Hodovoj-vint-osi-XСкачать
Hodovoj-vint-osi-YСкачать
Hodovoj-vint-osi-ZСкачать
Шаг 7: Рабочая поверхность
Местом, где вы будете закреплять заготовки, является рабочая поверхность. Некоторые профессиональные машины оснащены станиной с Т-образными пазами, позволяющими использовать Т-образные гайки и болты для закрепления материалов или тисков. Я предпочел использовать квадратный лист березовой фанеры толщиной 18 мм, который можно легко заменить, когда потребуется. Это недорогой вариант рабочей поверхности! Вы также можете использовать МДФ с анкерными гайками и болтами, но старайтесь избегать шурупов и гвоздей, так как они не так хорошо сцепляются с МДФ, как с фанерной плитой.
Некоторые профессиональные машины оснащены станиной с Т-образными пазами, позволяющими использовать Т-образные гайки и болты для закрепления материалов или тисков. Я предпочел использовать квадратный лист березовой фанеры толщиной 18 мм, который можно легко заменить, когда потребуется. Это недорогой вариант рабочей поверхности! Вы также можете использовать МДФ с анкерными гайками и болтами, но старайтесь избегать шурупов и гвоздей, так как они не так хорошо сцепляются с МДФ, как с фанерной плитой.
После того, как вы закончите работу на рабочей поверхности, ее можно отфрезеровать самой машиной. Это ваш первый проект, так что не бойтесь экспериментировать.
Шаг 8: Электрическая система
Основными элементами электрической системы для управления шаговыми двигателями являются:
- Шаговые двигатели — это электромеханические устройства, которые преобразуют электрический сигнал в механическое вращение. Шаговые двигатели широко используются в автоматических системах управления, таких как ЧПУ и 3D-принтеры.
- Шаговые драйверы — это устройства, которые управляют шаговыми двигателями, обеспечивая необходимую скорость и точность вращения. Шаговые драйверы могут управлять несколькими шаговыми двигателями и обеспечивать различные режимы работы.
- Блок питания — это устройство, которое обеспечивает электрическую энергию для работы шаговых двигателей и драйверов. Блок питания должен иметь достаточную мощность и напряжение для поддержки всех компонентов системы.
- Основание, которое используется для подключения всех компонентов системы. Оно обеспечивает крепление между шаговыми двигателями, драйверами, блоком питания и другими компонентами системы.
- Компьютер — это устройство, которое используется для управления системой. Компьютер должен иметь соответствующий интерфейс для подключения к шаговым драйверам, например, USB или параллельный порт.
- Безопасность — это важный аспект в любой электрической системе. В системе управления шаговыми двигателями необходимо предусмотреть аварийную остановку, которая будет работать при возникновении аварийной ситуации.
Важно выбирать компоненты совместимые и соответствующие потребностям конкретной системы управления.
Elektricheskaya-shemaСкачать
Шаг 9: Шпиндель
Для для использования режущих инструментов на станке необходимо использовать шпиндель, который может работать как на низких, так и на высоких скоростях. Для этой цели часто используют концевые фрезы. Выбор подходящего фрезерного двигателя может зависеть от мощности и скорости, которые вам необходимы. Например, для начинающих пользователей удобен фрезерный двигатель Dremeltool, а для более продвинутых — высокочастотный шпиндель мощностью в несколько кВт.
Если вы рассматриваете улучшение своего станка, то можно обратить внимание на надежный шпиндель Hf. Важно учитывать бюджет, который вы готовы потратить на это обновление.
Для того, чтобы использовать на станке различные размеры режущих насадок, стоит обратить внимание на наличие цанг разного размера. Это позволит использовать различные фрезы, что повысит функциональность вашего станка.
Шаг 10: Программное обеспечение ЧПУ
В теме управления станком с ЧПУ я рассмотрю не только программное обеспечение для управления станком, но и ПО, которое создает код, понятный станку.
Когда мы создаем деталь на компьютере, будь то плоская или объемная модель в CAD (система автоматизированного проектирования), необходимо преобразовать ее в формат, который понимает станок. С помощью CAM (автоматизированной обработки) мы можем считывать векторы и 3D-модели, создавая выходные данные в формате G-кода для ПО управления станком. Я использую пердпочитаю профессиональное программное обеспечение, Такое как SolidWorks, PowerMill, NX и т.д.
ПО управления станком представляет собой интерпретатор G-кода. Если вы используете USB-концентратор, как описано в разделе «Электросистема», то устройство будет иметь свое собственное ПО. Если вы используете параллельный порт принтера на старом компьютере, то можете выбрать свое ПО. Я решил использовать Mach4, так как он широко используется любителями.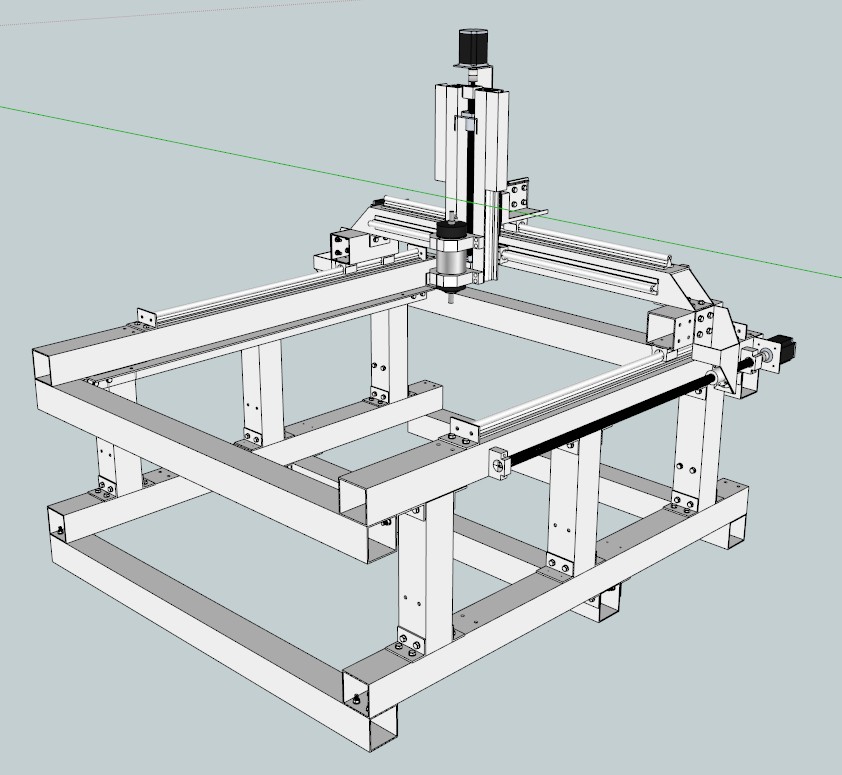 Больше информации можно найти на форумах и в поисковых системах. Mach4 имеет множество опций и функций, которые можно изучить и опробовать самостоятельно.
Больше информации можно найти на форумах и в поисковых системах. Mach4 имеет множество опций и функций, которые можно изучить и опробовать самостоятельно.
Шаг 11: Запуск станка
Готовый самодельный фрезерный станокНа этом этапе вы подключили все правильно и ваша машина работает! Обработку лучше начать с кусков дерева или пенопласта, и теперь вы можете наслаждаться скоростью и характеристиками вашей машины.
Важно искать подходящие запчасти и не спешить. Хотя вы можете сделать самодельный фрезерный станок за месяц, возможно лучше потратить время на подбор нужных и более дешевых деталейд. Это снизит ваши затраты, и вы сможете собрать станок менее чем за 500-800 евро.
Я уверен, что ваша история станет вдохновением для многих людей, которые хотят создать свой собственный фрезерный станок с ЧПУ. Если у вас есть какие-либо вопросы или замечания, не стесняйтесь обращаться ко мне или оставлять комментарии. Желаю вам успехов в вашем творческом процессе!
ЧПУ фрезер своими руками – чертежи, технология изготовления
ЧПУ фрезер своими руками – чертежи, технология изготовления
Итак, предлагаем поговорить о том, как сделать своими руками ЧПУ фрезер – подробности процесса, обзор требуемых наборов и комплектов, а еще общий опыт мастеров, которые уже это делали. Давайте откроем секреты сборки станка собственноручно. Итак, вы решили изготовить своими руками фрезерный ЧПУ станок, или, может быть, вы просто над этим лишь задумывались и не знаете, с чего начинать работы?
Давайте откроем секреты сборки станка собственноручно. Итак, вы решили изготовить своими руками фрезерный ЧПУ станок, или, может быть, вы просто над этим лишь задумывались и не знаете, с чего начинать работы?
Есть огромное количество достоинств в наличии машины с ЧПУ. Станки домашнего типа могут произвести фрезерование и разрезать практически все виды материалов. Будь вы мастер или любитель, это будет открывать вам большой горизонт для творчества.
Сам факт, что один из станков может оказаться в личной мастерской, еще больше соблазнителем.
Содержание:
Общие сведения
Есть огромное количество причин, по которым люди желают построить собственный фрезеровальный станок, имеющий числовое программное управление, своими руками. Как правило, это происходит лишь по той причине, что мы просто не способны позволить приобрести себе его в магазине или напрямую от производителя, и в этом нет ничего странного, потому что их стоимость крайне велика. Или же вы можете быть похожи на домашних мастеров и получить множество удовольствия от проделанной своими руками работы и создания чего-то невероятного, оригинального. Вы можете просто заниматься таким для получения опыта в деле машиностроения.
Или же вы можете быть похожи на домашних мастеров и получить множество удовольствия от проделанной своими руками работы и создания чего-то невероятного, оригинального. Вы можете просто заниматься таким для получения опыта в деле машиностроения.
Опыт
Когда мастера начали впервые разрабатывать, продумывать и изготавливать первый ЧПУ фрезеровальный станок своими руками, на подготовку проекта ушел приблизительно 1 день. Далее, после этого пришлось покупать элементы, и тут были проведены исследования.
И в форумах, как оказалось, можно найти в разных форумах и источниках, что привело к образованию новых вопросов:
- Действительно ли требуются шарико-винтовые пары, или простые шпильки и гайки будут тоже работать вполне нормально.
- Какой из линейных подшипников лучше, и стоит ли его покупать?
- Двигатели с какими параметрами требуются, и лучше использовать сервопривод или шаговик?
- Деформируется ли корпусный материал очень сильно при огромном размере станка?
К огромной радости, на некоторые вопросы можно сразу ответить за счет своей инженерно-технической базе, которая часто остается после учебы в соответствующем заведении. И все-таки, многие из проблем, с которыми можно столкнуться, не могли быть рассчитаны. Возможно, вам потребуется кто-то, имеющий практический опыт и информацию по такому вопросу. Естественно, что на форумах по данному вопросу можно найти много ответов от разных людей, и многие из которых противоречили друг другу. В этом случае потребуется продолжить исследования, чтобы выяснить, какие из ответов правда, а что является лишь словесным мусором. Но так приходится делать, если у вас ограниченный бюджет и хочется взять все лучшее из того, что можно приобрести за имеющиеся деньги. Аналогичная ситуация у большинства людей, которые создают самодельный станок фрезера с ЧПУ.
И все-таки, многие из проблем, с которыми можно столкнуться, не могли быть рассчитаны. Возможно, вам потребуется кто-то, имеющий практический опыт и информацию по такому вопросу. Естественно, что на форумах по данному вопросу можно найти много ответов от разных людей, и многие из которых противоречили друг другу. В этом случае потребуется продолжить исследования, чтобы выяснить, какие из ответов правда, а что является лишь словесным мусором. Но так приходится делать, если у вас ограниченный бюджет и хочется взять все лучшее из того, что можно приобрести за имеющиеся деньги. Аналогичная ситуация у большинства людей, которые создают самодельный станок фрезера с ЧПУ.
Комплекты и сборочные наборы фрезеров с ЧПУ
Да, существуют доступные комплекты станков для ручных работ по сборке, но еще не было таких наборов, которые можно было бы подстраивать под определенные нужды.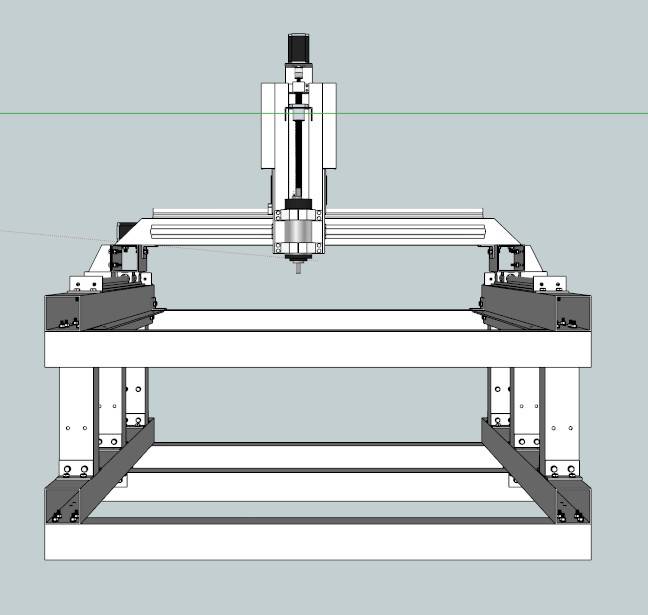 Еще нет возможности вносить конструкционные изменения и разновидности станка, а еще их много, и откуда вы знаете, какой из них подойдет конкретно вам? Вне зависимости от того, насколько хороша инструкция, если конструкция продумана ужасно, то конечная машина останется плохой. Вот по этой причине требуется быть осведомленной относительно того, что вы строите и понимать определенную роль играют все детали.
Еще нет возможности вносить конструкционные изменения и разновидности станка, а еще их много, и откуда вы знаете, какой из них подойдет конкретно вам? Вне зависимости от того, насколько хороша инструкция, если конструкция продумана ужасно, то конечная машина останется плохой. Вот по этой причине требуется быть осведомленной относительно того, что вы строите и понимать определенную роль играют все детали.
Руководство
Данное руководство нацелено на то, чтобы не давать вам повторить те же ошибки, на которые другие мастера потратили своего драгоценного времени и средства. Мы рассмотрим все компоненты даже до болтиков, глядя на достоинства и недостатки всех типов деталей. Мы расскажем вам о каждом аспекте проектирования, а еще вы узнаете о том, как создавать ЧПУ станок своими руками. Мы проведем вас через механику до программного обеспечения и всему промежуточному.
Обратите внимание, что самодельные чертежи ЧПУ станков предлагают мало методов решения определенных проблем.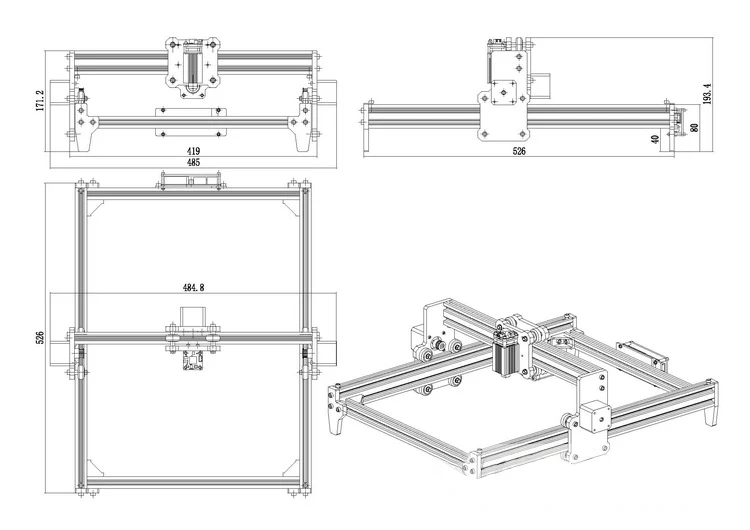 Это часто может привести к «неаккуратной» конструкции или даже неудовлетворительной работе машины. Вот этой причине предлагаем вам для начала прочесть следующее руководство.
Это часто может привести к «неаккуратной» конструкции или даже неудовлетворительной работе машины. Вот этой причине предлагаем вам для начала прочесть следующее руководство.
Подробности
Ключевые особенности
В первую очередь следует рассмотреть такие вопросы:
- Определите подходящие конструкции конкретно для вас (к примеру, если вы планируете сделать станок по древесине собственноручно).
- Требуемая площадь обработки.
- Доступность рабочего места.
- Допуски.
- Материалы.
- Способы конструирования.
- Доступные инструменты.
- Бюджет.
Теперь поговорим про оси.
Основание и ось Х-оси
Тут мы рассмотрим такие вопросы:
- Проектирование и построение главной базы или основания Х-оси.
- Разбивание разных конструкций на отдельные элементы.
- Жестко прикрепленные детали.
- Частично закрепленные элементы и прочее.
Проектирование оси Y
В этом пункте рассмотрим такие вопросы:
- Проектирование и изготовление портальной оси Y.

- Разбивайте разные конструкции на элементы.
- Моменты и силы на порте и прочее.
Как собрать ось Z
Тут мы рассмотрим такие вопросы:
- Проектирование, а еще сборочные работы по оси Z.
- Далее рассматриваем моменты и силы на оси.
- Уделите внимание рельсам и направляющим, а еще расстоянию между подшипниками.
- Выбор кабель-канала.
Линейная система движения
В таком пункте предлагаем рассмотреть такие вопросы:
- Подробно изучите системы линейного движения.
- Подбор правильной системы конкретно для вашего типа станка ЧПУ.
- Проектирование и возведение собственных направляющих при маленьком бюджете.
- Втулки и линейный вал или блоки и рельсы?
Компоненты привода механики
Чертежи ЧПУ фрезера своими руками требуется рассматривать, чтобы подбирать компоненты механического привода:
- Детальный обзор приводных частей.
- Подбор подходящих элементов для вашего вида станка.
- Серводвигатели или шаговые.
- Шариково-винтовые и винты пары.
- Приводные гайки.
- Упорные и радиальные подшипники.
- Крепление и муфта двигателя.
- Редуктор или прямой привод.
- Шестерни и стойки.
- Калибрование винтов относительно двигателей.
Подбор двигателя
Тут потребуется следующее:
- Подробный обзор двигателей с устройством.
- Разновидности двигателей с ЧПУ.
- Как работают двигатели шагового типа.
- Разновидности шаговых двигателей.
- Как работают сервомоторы.
- Разновидности серводвигателей.
- Стандарты NЕМА.
- Подбор правильного типа электрического двигателя для вашего проекта.
- Измерение моторных параметров.
Конструкция режущего стола
Тут мы рассмотрим следующие вопросы:
- Проектирование и возведение собственных столов при маленьком бюджете.

- Перфорированный слой резки.
- Вакуумный столик.
- Обзор конструкции режущего стола.
- Стол можно вырезать посредством фрезерного станка по дереву.
Шпиндельные параметры
В этом шаге рассмотрим такие вопросы:
- Обзор шпинделей с числовым программным обеспечением.
- Функции и типы.
- Траты и ценообразование.
- Варианты установки и охлаждения.
- Варианты установки и охлаждения.
- Охладительные системы.
- Создание шпинделя своими руками.
- Произведение расчета стружки и силы резки.
- Нахождение идеальной скорости подачи.
Электроника
Здесь мы рассмотрим следующие вопросы:
- Панель управления.
- Предохранители и электрическая проводка.
- Переключатели и кнопки.
- Круги МРG и Jоg.
- Источник питания.
Параметры контроллера ПУ (программного управления)
В этом шаге рассмотрим такие вопросы:
- Рассмотрите контроллер ЧПУ.
- Подбор контроллера.
- Доступные функции.
- Системы, имеющие замкнутый контур и разомкнутый контур.
- Контроллеры по умеренной стоимости.
- Изготовление своего контроллера с нуля.
Подбор ПО (программного обеспечения)
И осталось рассмотреть следующие вопросы:
- Обзор ПО (программного обеспечения), который связан с ЧПУ.
- Выбор программного обеспечения.
- ПО САМ.
- ПО САПР.
- ПО NС Соntrоllеr.
Это, пожалуй, и все. На самом деле все не так уж и сложно, главное, разобраться.
Рейтинг
( 3 оценки, среднее 1 из 5 )
0 4 739.
Олег Сомов/ автор статьи
Опытный строитель с более чем 10 летнем стажем Каркасных и Фахверковых домов из клеенного бруса, делюсь опытом с читателями моего сайта, жмите звездочку и делитесь с друзьями, если было полезно!
Понравилась статья? Поделиться с друзьями:
Самодельный перьевой плоттер с автоматической сменой инструмента
В этом уроке я покажу вам, как я построил перьевой плоттер с ЧПУ или чертежную машину, но с одной интересной функцией — автоматической сменой инструмента. Другими словами, машина сможет автоматически менять цвета, и мы сможем рисовать с ее помощью действительно классные вещи.
Вы можете посмотреть следующее видео или прочитать письменный учебник ниже.
Обзор
Конструкция станка основана на моем самодельном станке для лазерной гравировки с ЧПУ из моего предыдущего видео, где целью было сделать самый простой станок с ЧПУ с минимальным количеством деталей. Он использует 3 шаговых двигателя NEMA 17 для перемещения по осям X, Y и Z, а также небольшой сервопривод для захвата. Мозгом этого плоттерного станка с ЧПУ Pen является плата Arduino UNO в сочетании с экраном с ЧПУ и тремя A49.88 шаговых драйверов.
Рабочая область довольно большая, 360×280 мм, и уровень детализации, который может выводить этот перьевой плоттер, на мой взгляд, тоже впечатляет. Я был действительно удивлен, насколько хорошими и точными получились рисунки, особенно те, где я использовал гелевую ручку 0,6 мм.
Тем не менее, теперь я объясню все, что вам нужно знать о создании такой чертежной машины, в том числе о том, как ее спроектировать, подключить электронику, какую прошивку и программное обеспечение использовать и как сгенерировать для нее G-код.
3D-модель перьевого плоттера с ЧПУ своими руками
Для начала давайте посмотрим на конструкцию этого станка с ЧПУ. Как я уже упоминал, этот станок основан на конструкции моего предыдущего лазерного гравировального станка с ЧПУ, целью которого было создание очень простого ЧПУ с минимальным количеством деталей.
Двумя основными компонентами являются линейные направляющие MGN15H вместе с соответствующими скользящими блоками. Движение по осям X и Y обеспечивается двумя ремнями GT2 и несколькими шкивами GT2. Что касается оси Z, у нас есть простое возвратно-поступательное движение, при котором движущаяся часть скользит вверх и вниз по двум линейным стержням 6 мм и подходящим линейным подшипникам. Небольшой хобби-сервопривод используется для захвата пера.
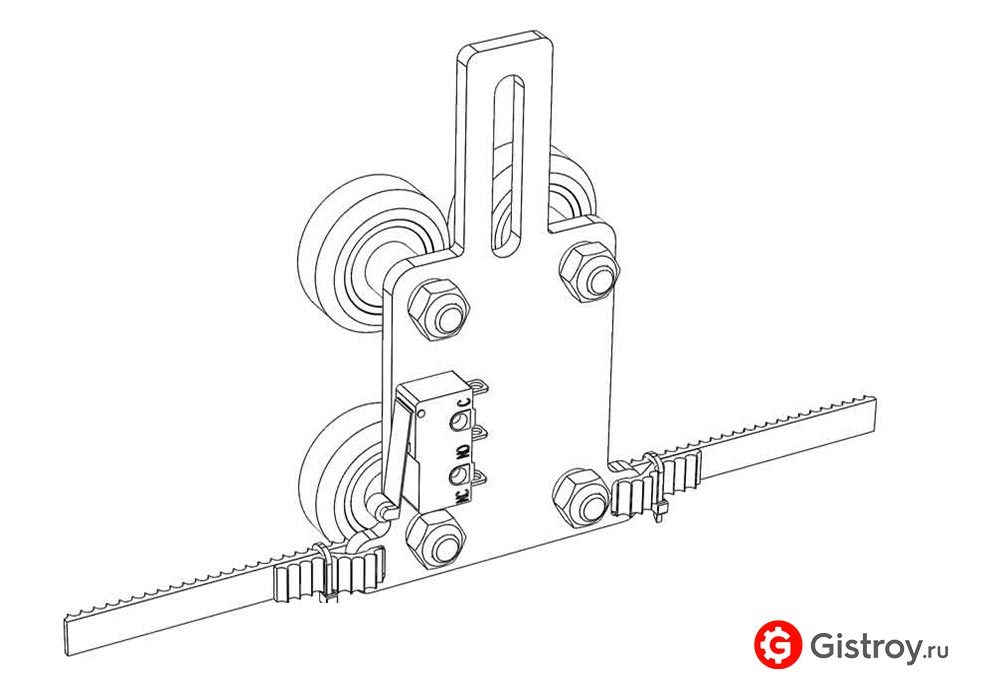
Процедура возврата в исходное положение необходима для этого перьевого плоттера, поскольку держатели перьев имеют определенное фиксированное положение, поэтому у машины должна быть начальная точка. Следовательно, мы должны иметь концевой выключатель для каждой оси.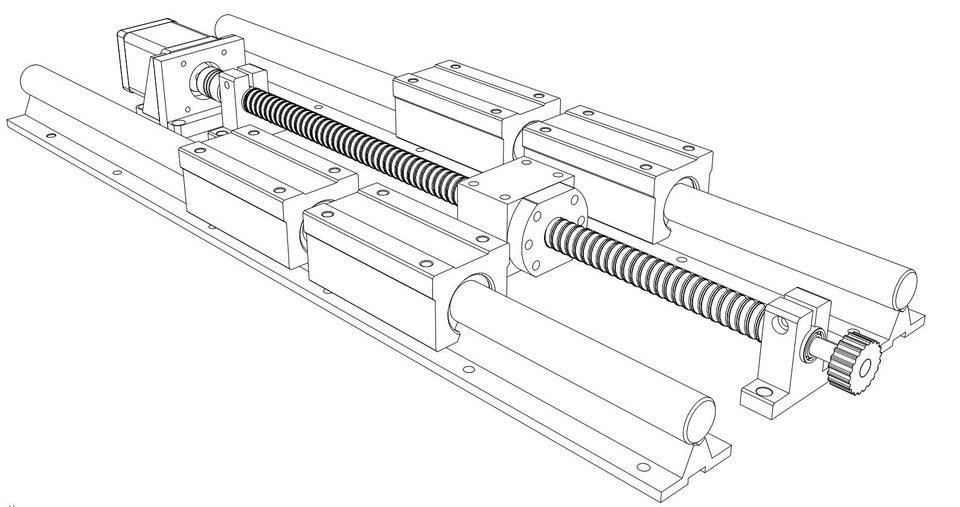
Вы можете найти и скачать эту 3D-модель, а также изучить ее в своем браузере на Thangs:
Скачать сборную 3D-модель на Thangs.
Спасибо Thangs за поддержку этого урока.
Что касается файлов STL, которые используются для 3D-печати деталей, вы можете скачать их здесь:
Сборка машины
Вот все детали, необходимые для сборки перьевого плоттера.
Вот список компонентов, необходимых для сборки этого станка с ЧПУ своими руками. Список электронных компонентов можно найти ниже в разделе принципиальных схем статьи.
- Линейный рельс MGN15H ………………………… Amazon / Banggood / AliExpress
- Линейный стержень 6 мм ……………………………….. 9003 8 Амазонка / AliExpress
- Линейный подшипник 6 мм …………………………. Amazon / AliExpress
- Шаговый двигатель – NEMA 17 …………….… Amazon / Banggood / AliExpress
- Ремень GT2 + зубчатый шкив……………….
 …… Amazon 90 039 / Banggood /Aliexpress
…… Amazon 90 039 / Banggood /Aliexpress - GT2 Idler шкив …………………………….….… Amazon / Banggood / Aliexpress
- Spacer Nuts ……………………………. …….. Amazon / Banggood / AliExpress
- Набор болтов и гаек ……………………………… Amazon / Banggood / AliExpress или в местном хозяйственном магазине + винты с плоской головкой 3×16 мм 900 44
Раскрытие информации: эти являются партнерскими ссылками. Как партнер Amazon я зарабатываю на соответствующих покупках.
Итак, теперь мы можем начать сборку машины. Я начал с крепления опорной плиты и кронштейна для линейной направляющей с помощью нескольких болтов M3. Все болты для сборки этой машины на самом деле M3 с различной длиной, за исключением нескольких болтов M5, необходимых для шкивов GT2.
Когда две стороны готовы, мы можем прикрепить к ним линейную направляющую оси X двумя болтами с каждой стороны. Эти направляющие MGN15H обеспечивают очень плавное движение без зазоров, так как в их скользящих блоках есть шарики или ролики.
Эти направляющие MGN15H обеспечивают очень плавное движение без зазоров, так как в их скользящих блоках есть шарики или ролики.
Однако перед установкой их рекомендуется очистить и хорошо смазать, чтобы они работали должным образом.
Далее, направляющая оси Y должна быть наверху скользящего блока оси X, и для их соединения мы будем использовать центральную монтажную пластину. Во-первых, мы можем установить направляющую оси Y на центральную пластину с помощью трех болтов.
Затем мы можем установить два шаговых двигателя NEMA 17. Один идет на верхнюю сторону, а другой на нижнюю сторону пластины. Как я упоминал ранее, нам понадобятся болты и гайки M5 для установки шкивов GT2 на место. Два шкива здесь на самом деле являются натяжными шкивами, которые используются для обеспечения захвата ремня GT2 оси X, и зубчатого шкива, который идет на шаговый двигатель.
Что касается установки этого шкива, мы должны измерить и выровнять его по натяжным шкивам. Что касается оси Y, нам нужен только один натяжной ролик, который идет с другой стороны рельса, так как ремень для этой оси будет установлен в виде петли.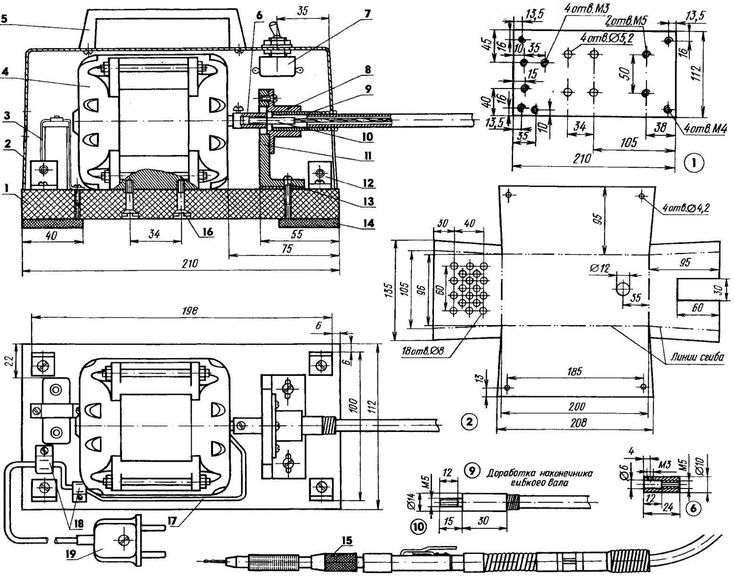
Ок, дальше брак или соединение двух осей вместе. Мы просто делаем это, прикрепляя центральную пластину к скользящему блоку оси X с помощью четырех болтов M3. Благодаря этому машина приобрела свою основную форму, и теперь скользящий блок оси Y может занимать любое положение в рабочей зоне.
Теперь мы можем продолжить сборку механизма подъема ручки. Этот механизм состоит из двух частей, одна из которых прикреплена болтами к скользящему блоку оси Y, а другая будет скользить вверх и вниз. Как только неподвижная часть закреплена на месте, мы можем установить на нее шаговый двигатель оси Z. Этот шаговый двигатель также соответствует стандарту NEMA 17, но он короче, 23 мм вместо 40 мм, чтобы уменьшить вес.
Затем мы можем установить подъемник, который просто крепится к валу шагового двигателя. Установочный винт, который у меня был, был длинноват для него, поэтому я прикрепил подъемник к валу без него, но его отверстие имеет форму вала, поэтому движение будет хорошо передаваться. На самом деле я немного изменил эту часть, но не беспокойтесь, вы получите ее обновленную версию в загружаемых файлах.
На самом деле я немного изменил эту часть, но не беспокойтесь, вы получите ее обновленную версию в загружаемых файлах.
Затем я вставил четыре линейных подшипника в скользящую часть и закрепил микросервопривод на месте. Затем я также закрепил часть держателя ручки рядом с сервоприводом.
Чтобы соединить неподвижную и подвижную части вместе, сначала нам нужно пропустить провод сервопривода через отверстие в неподвижной части, а затем вставить 6-миллиметровые стержни сверху через подшипники и отверстие неподвижной части. При установке этого стержня мы также должны вставить пружину между неподвижной и подвижной частью таким образом, чтобы она толкала подвижную часть вниз.
Это поможет ручке лучше контактировать с рабочей поверхностью. На нижней стороне неподвижной части есть отверстие, куда мы можем вставить гайки M3 и использовать их для крепления стержней 6 мм на месте.
Затем мы можем собрать блок держателя ручек, который идет с одной стороны машины. Он состоит из верхней и нижней части с отверстиями для размещения до 12 ручек.
Продолжил установку ремней. Для начала нам нужно отмерить нужную нам длину и отрезать примерно по размеру. Для крепления ремня к скользящему блоку я сделал вот такие крутые соединители для ремня, где ремень проходит вокруг полого вала и между двумя стенками, которые не позволяют ремню двигаться.
Используя болт М3, мы можем закрепить первый разъем на одной стороне блока и повторить ту же процедуру для другой стороны. Мы можем перемещать разъемы вдоль этих пазов здесь и натягивать ремень так, как мы хотим.
Что касается оси X, то ремень будет проходить по прямой от одной стороны к другой, проходя через шкивы таким образом, чтобы обеспечить натяжение или сцепление со шкивом шагового двигателя.
Для натяжения ремня оси X я сделал эти соединители, которые имеют форму ремня, поэтому мы можем притянуть их к бокам машины.
Далее мы можем установить концевые выключатели.
На самом деле я немного опустил этот концевой выключатель по оси Z, а что касается концевых выключателей X и Y, я использовал те, что были в моем предыдущем проекте, к которым уже были подключены провода.
Подключение электроники
На этом механическая часть машины готова и можно переходить к подключению электроники.
Как я уже упоминал, мы используем плату Arduino Uno в сочетании с экраном с ЧПУ и тремя A49.88 шаговых драйверов.
Для крепления платы Arduino к машине я сделал дополнительную 3D-печатную деталь, которая идет на боковой панели. Я закрепил плату Arduino двумя болтами M3, а поверх нее вставил шилд ЧПУ.
Здесь нам нужно вставить три перемычки для каждого драйвера шагового двигателя, чтобы выбрать разрешение 16 th /step, а затем мы вставляем драйверы шагового двигателя.
Затем мы можем правильно подключить двигатели к щиту ЧПУ. Для подключения микроконцевых выключателей на месте я просто припаял провода прямо к ним, а с другой стороны припаял штыревые разъемы, которые я получил от соединительных проводов.
Что касается серводвигателя, я использовал несколько удлинительных кабелей сервопривода, чтобы он мог добраться до экрана ЧПУ. Для питания станка нам понадобится блок питания 12В. Вот принципиальная схема того, как все должно быть подключено.
Для питания станка нам понадобится блок питания 12В. Вот принципиальная схема того, как все должно быть подключено.
Электрическая схема самодельного ЧПУ-плоттера
Вот принципиальная схема того, как все должно быть подключено.
Вы можете получить компоненты, необходимые для этого проекта, по ссылкам ниже:
- Шаговый двигатель — NEMA 17……………… Amazon / Banggood / AliExpress
- Шаговый двигатель — NEMA 17 23 мм ….. Amazon / Banggood / AliExpress
- A4988 Драйвер шагового двигателя………………..…..… Amazon / Banggood / AliExpress
- Сервопривод Мотор …………………………………….… Amazon/Banggood/Aliexpress
- Arduino Cnc Shield ………………………… .. Amazon / Banggood /Aliexpress / Banggood /Aliexpress /.
- Arduino Uno………………………………….
 … Amazon / Banggood / AliExpress
… Amazon / Banggood / AliExpress - Концевой выключатель ……………………………………. Amazon / Banggood / AliExpress
- Блок питания постоянного тока …………………………… Amazon / Banggood / Ali Экспресс
Раскрытие информации: Это партнерские ссылки. Как партнер Amazon я зарабатываю на соответствующих покупках.
Итак, мы используем плату Arduino UNO в сочетании с CNC Shield и тремя шаговыми драйверами A4988. У нас есть три микровыключателя для возврата станка в исходное положение и небольшой серводвигатель для механизма захвата. Для питания нам понадобится блок питания 12v с минимальной силой тока 2 ампера.
Завершение сборки машины
Осталось сделать несколько последних штрихов, чтобы закончить этот перьевой плоттер. Здесь я устанавливаю захват для пера, который просто присоединяется к серводвигателю через рожок сервопривода.
Для прокладки кабелей от подъемника для ручек я использовал коврик для обеденного стола, материал которого был прочным, но гибким, поэтому он идеально подходил для этой работы.
На этом наша чертежная машина завершена. Тем не менее, есть несколько вещей, которые мы должны отметить здесь. Поскольку направляющая оси Y не поддерживается с одной стороны, а сам материал PLA для 3D-печати не такой жесткий, при полном выдвижении подъемник пера был на 4 мм ниже по сравнению с поддерживаемой стороной.
Это слишком много, но мне удалось решить эту проблему, немного приподняв переднюю часть машины. Таким образом я уменьшил разницу примерно до 1 мм, что было приемлемо. если вы планируете использовать эти большие рельсы, я бы определенно предложил поддержать рельс оси Y с другой стороны.
Еще одна проблема связана с держателем для ручек, поскольку в этом случае ручки плохо удерживаются на месте. Здесь я бы предложил увеличить верхние отверстия и добавить немного мягкого материала по бокам, чтобы ручки оставались на месте, а машине было легко вставлять их.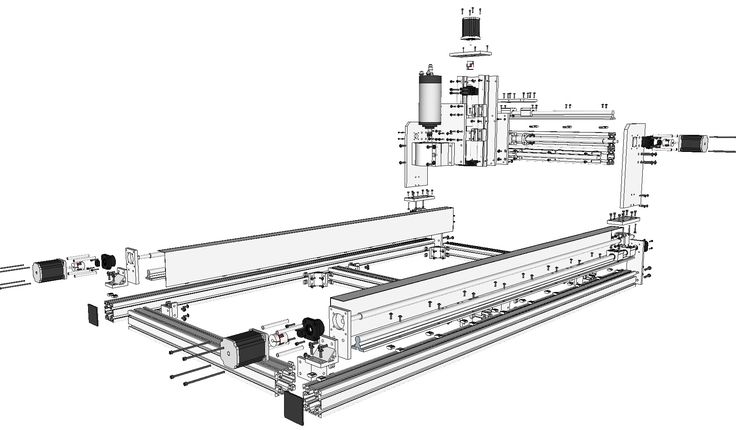
Наконец, мы можем вставить доску под всю машину, чтобы получить ровную поверхность.
Вот и все, наша машина готова.
Прошивка и управляющее ПО для самодельного перьевого плоттера
Осталось дать ему жизнь или сделать из него настоящий станок с ЧПУ. Для этого нам нужно установить прошивку на Arduino для управления движением станка с ЧПУ, и нам нужно управляющее программное обеспечение, с помощью которого мы будем отправлять G-коды и сообщать станку, что делать.
Наиболее популярным выбором для станков с ЧПУ своими руками является прошивка GRBL с открытым исходным кодом. Однако для этого перьевого плоттера нам нужна его модифицированная версия, которая может управлять серводвигателем. Эта модифицированная версия, называемая «grbl-servo», изменяет частоту ШИМ по умолчанию для вывода управления шпинделем (или цифрового вывода номер 11) с 1 кГц до 50 Гц, что необходимо для управления этим типом серводвигателя.
После того, как мы загрузим и установим эту прошивку GRBL в папку библиотеки нашей Arduino IDE, нам также необходимо изменить ее файл config. h, чтобы включить 3-осевое самонаведение вместо стандартного 2-осевого.
h, чтобы включить 3-осевое самонаведение вместо стандартного 2-осевого.
Что касается программного обеспечения для управления, мы будем использовать GRBL-Plotter, который предназначен для управления плоттерами и включает в себя графический преобразователь, с помощью которого мы можем генерировать G-код из наших изображений или графики. Это также программное обеспечение с открытым исходным кодом, которое можно загрузить с Github.
Здесь первое, что нам нужно сделать, это подключить нашу плату Arduino к программному обеспечению через подходящий COM-порт. Как только мы нажмем кнопку «Kill Alarm», на последовательном мониторе мы получим список наших текущих параметров GRBL. Нам нужно изменить некоторые из этих параметров в соответствии с нашей машиной.
Параметры GRBL
Первое, что мы должны настроить здесь, это разрешение перемещения или значения шагов/мм. Эти значения показывают, сколько шагов должен сделать двигатель, чтобы переместиться на 1 мм. Это зависит от типа имеющегося у нас шагового двигателя, выбранного разрешения шага и передачи движения, в данном случае ремня и шкива GT2.
Для нашего станка требуется значение 80 шагов/мм, чтобы оси X и Y были точными. Что касается оси Z, я установил значение 40, что на самом деле не точно с точки зрения реального движения, но мы все равно не можем достичь этого с нашим возвратно-поступательным движением.
Мы также должны установить номер параметра 23 на 0, который сообщает, где расположены наши концевые выключатели, установить максимальную скорость подачи, ускорение, максимальную скорость перемещения и параметр номер 1 на значение 255, которое поддерживает работу шаговых двигателей. все время. Тем не менее, мы должны отметить, что при включении этой функции, особенно для шагового двигателя с осью Z, мы должны настроить предел тока драйвера A4988 на минимум, потому что более короткий шаговый двигатель NEMA 17 может быстро нагреться.
Настройка плоттера GRBL
Хорошо, теперь давайте посмотрим на настройку контроллера. Здесь так много вариантов настройки, что поначалу это может немного пугать. Здесь сначала нам нужно установить перемещение пера вверх и вниз по оси Z и установить значения для положения вверх и вниз.
Здесь сначала нам нужно установить перемещение пера вверх и вниз по оси Z и установить значения для положения вверх и вниз.
На вкладке Таблица инструментов мы можем определить цвет перьев и их положение. Здесь следует отметить, что эти значения относятся к G53 или системе координат станка. Это означает, что они определяются жесткими концевыми выключателями машины и максимальным ходом, который мы установили ранее в параметрах GRBL.
Для определения положения каждого пера я использовал значения смещения, которые в данном случае равны 0 для оси X и 277 для оси Y. Эти значения располагают захват перед первой ручкой, а затем мне просто нужно было определить значение Y для каждой ручки, которое составляет 21,7 мм в отрицательном направлении.
Здесь мы также можем отрегулировать скорость подачи и положение вверх и вниз для каждого пера отдельно, если это разные перья.
Затем в разделе «Смена инструмента» мы должны выбрать «Выполнить смену инструмента на Tx M06», что говорит станку выполнить смену инструмента, когда эта команда появляется в G-коде.
Значение «x» после буквы T указывает номер инструмента из таблицы инструментов. Чтобы выполнить смену инструмента, мы должны включить сценарии «выбрать» и «удалить», которые выполняются при появлении команды Tx M06. В этих сценариях мы определяем движение захвата, чтобы взять или удалить инструмент.
Для выбора пера захват сначала позиционируется перед фактическим пером в абсолютных координатах станка, определенных в таблице инструментов. Затем сервопривод открывает захват, он поднимается еще на 4 мм, затем движется к ручке в направлении X и немного в направлении Y. Затем захват закрывается, поднимает перо вверх и возвращается в то же положение перед выполнением сценария. Для удаления пера шаги сценария такие же, но в обратном порядке.
Разумеется, все эти параметры зависят от самих ручек, их размеров и размеров держателей. Единственный способ сделать этот процесс правильным — это протестировать и исправить значения.
Генерация G-кода для перьевого плоттера с ЧПУ с автоматической сменой инструмента
Наконец, давайте посмотрим, как мы можем генерировать G-код из изображений с помощью этого программного обеспечения GRBL-Plotter.
После того, как мы загрузили изображение, мы можем нажать «Предварительный просмотр с цветами из таблицы», чтобы увидеть, как будет выглядеть изображение. На вкладке коррекции изображения мы можем поиграть со значениями яркости, контрастности, гаммы и насыщенности, чтобы добиться цветов, похожих на реальное изображение или на те, которые нам действительно нужны. Мы можем установить размер вывода в мм, а в кране замены цвета мы можем удалить цвета, которые мы не хотим использовать.
Например, мы можем удалить абрикосовый цвет, который является белым цветом изображения. Затем мы можем нажать кнопку «Создать G-код», и G-код будет сгенерирован.
Мы также можем генерировать G-коды из файлов SVG, которые мы можем просто перетащить, и программа сразу же сгенерирует G-код.
Прежде чем мы начнем рисовать, мы должны установить нулевую позицию в любом месте рабочей области, а затем нажать кнопку воспроизведения.
Перьевой плоттер заработает, и мы сможем наслаждаться его волшебством.
Надеюсь, вам понравилось это видео и вы узнали что-то новое. Если у вас есть какие-либо вопросы, не стесняйтесь задавать их в разделе комментариев ниже.
Контроллер ЧПУ Buildbotics с открытым исходным кодом
Контроллер Buildbotics представляет собой полностью закрытый интеллектуальный станок с ЧПУ. контроллер со встроенным веб-интерфейсом и усовершенствованным процессором GCode. Он может управлять до 4 шаговыми двигателями и множеством различных инструментов, таких как шпиндель с ЧПУ, лазерный резак или плазменный резак.
Вы можете купить его прямо сейчас в нашем магазине.
Передняя панель
Задняя панель
Главный вход/выход
Подключение концевых выключателей, измерение оси Z, ШИМ-управление шпинделем, RS-485
управление шпинделем и аварийный останов легко переключаются с помощью прилагаемого 25-контактного разъема.
Плата ввода-вывода с простыми винтовыми клеммами.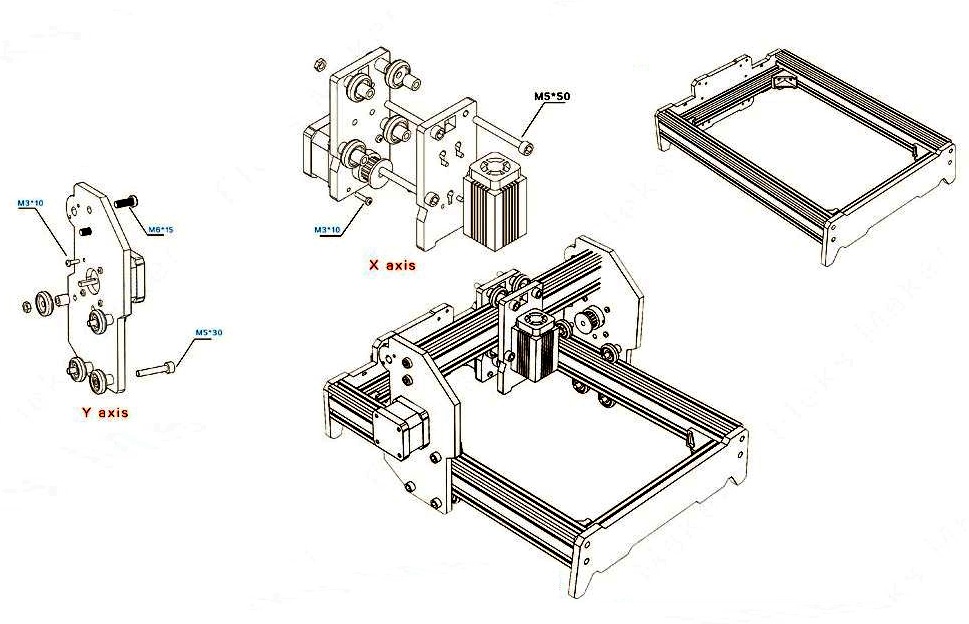
Ознакомьтесь со схемой распиновки.
Дополнительный вход/выход Breakout
Подключение сигналов шага и направления к внешним драйверам двигателя для использования шаговые двигатели с обратной связью или даже серводвигатели с контроллером Buildbotics.
Используйте выход 0-10 В для управления аналоговыми шпинделями.
Прилагаемый USB-геймпад
Простая и маневренная настройка с помощью прилагаемого геймпада.
Кабели в комплекте
Контроллер Buildbotics обеспечивает следующую экономию времени готовые кабели:
- 4 x 10 футов (3 метра) Кабели двигателя
- 1 x 4 фута (1,2 метра) Кабель питания
Дополнительная веб-камера USB
присматривайте за своим ЧПУ от в любом месте с помощью веб-браузера или смартфона. Добавьте его в свой контроллер посылка, выбрав опцию в нашем магазине.
Варианты источника питания
Подключите любой источник питания с выходным напряжением от 24 В до 48 В постоянного тока с током не менее 6 А. с помощью прилагаемого кабеля питания выберите один из наших комплектных блоков питания
варианты в нашем магазине.
с помощью прилагаемого кабеля питания выберите один из наших комплектных блоков питания
варианты в нашем магазине.
Встроенные драйверы шаговых двигателей
- 4 канала драйверов двигателей
- До 6 А на канал
- 24–48 В постоянного тока
- До 256 микрошагов
- Плавное ускорение по S-образной кривой
- Частота шагов до 250 тыс./сек на канал.
Привод большинства двигателей NEMA 17, NEMA 23 и NEMA 34. Предварительная поддержка 4-я ось как поворотная ось. Четвертый драйвер может быть синхронизирован с приводом одна ось с двумя двигателями. Вот список некоторых двигатели, которые мы рекомендуем.
S-Curve Acceleration
S-Curve Acceleration — это усовершенствованный алгоритм планирования движения, который
сглаживает движение ЧПУ. Большинство контроллеров ЧПУ используют трапецеидальные
ускорение, которое намного проще, но приводит к рывкам, которые
производит грубую резку и увеличивает износ как инструментов, так и ЧПУ
сама машина.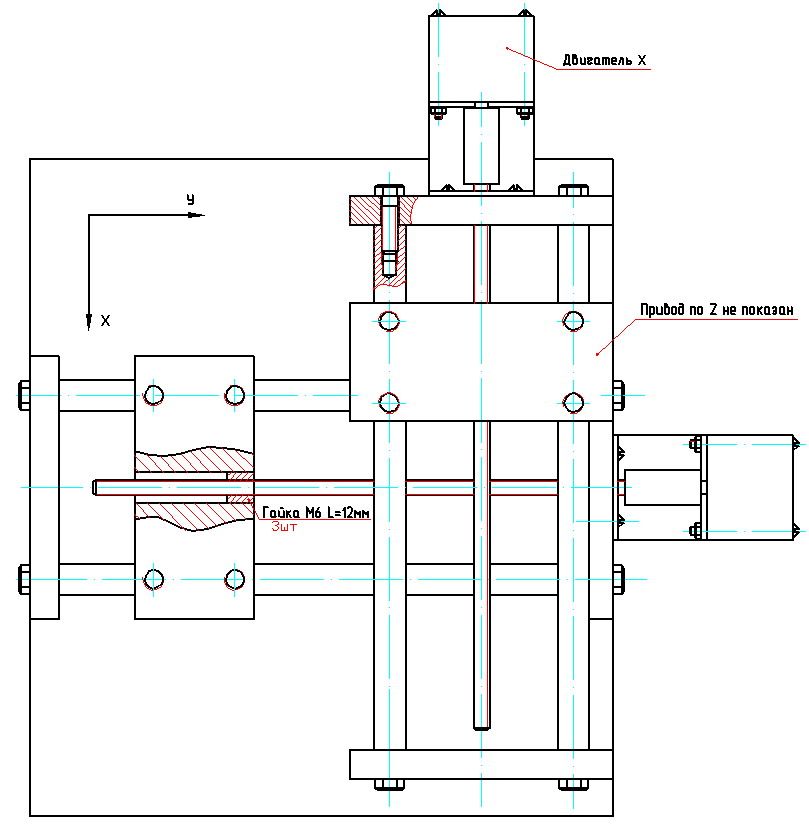
Awesome Служба технической поддержки
При необходимости свяжитесь с реальным человеком . Мы предоставляем технические поддержку по электронной почте, телефону или через на форуме Билдботикс.
Ознакомьтесь с нашими отзывами чтобы увидеть, насколько наши клиенты любят нашу техническую поддержку.
Есть вопросы?
Электронная почта ([email protected]) или позвоните по телефону нас (707-559-8539). Мы будем рады помочь.
Ознакомьтесь с нашими обзорами
Многие из наших клиентов построили новые ЧПУ, переоборудовали старые или модернизировали свои существующие станки с помощью контроллера ЧПУ Buildbotics. Проверьте их обзоры, чтобы увидеть что некоторые из них должны сказать.
Попробуйте программное обеспечение контроллера онлайн
Сделайте свой ЧПУ невероятно простым в использовании с контроллером Buildbotics интуитивно понятное встроенное программное обеспечение.
Щелкните здесь, чтобы попробовать демоверсию.
Загрузите свой GCode и нажмите кнопку воспроизведения, чтобы запустить симуляцию настоящий контроллер ЧПУ Buildbotics.
Узнайте, как настроить двигатель, инструмент и концевые выключатели.
Совместимость с большинством программ CAM
Контроллер ЧПУ Buildbotics принимает GCode из программ CAM, таких как Fusion 360, Mastercam, VCarve, BobCAD, MeshCAM, CamBam и многие другие. Бесплатно протестируйте свой GCode для Buildbotics на совместимость с CAMotics.
Надежная электроника
Мы знаем, что вы хотите, чтобы ваш ЧПУ работал именно тогда, когда вам это нужно. Тем не менее, многие дешевые контроллеры ЧПУ были разработаны практически без внимания к электробезопасности. Контроллер Buildbotics защищен от:
- Перегрузка по току
- Тепловая перегрузка
- Пониженное напряжение
- Обратное напряжение
- Короткое замыкание
- Всплески напряжения, вызванные остановкой двигателя
Охлаждение без вентилятора
Контроллер Buildbotics защищает от тепловой перегрузки.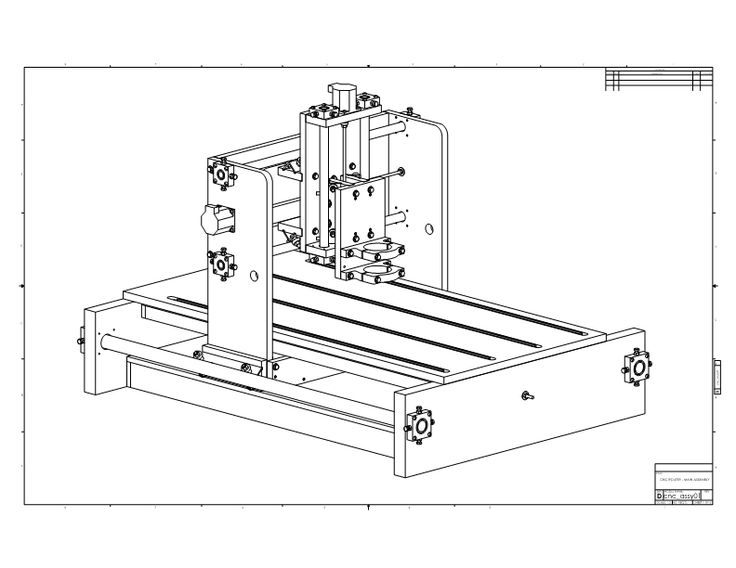 Благодаря тщательному выбору высококачественных электронных компонентов,
Контроллер Buildbotics остается прохладным, без вентилятора, даже при движении 6А
двигательные нагрузки. Отсутствие вентилятора не только устраняет шум, но и предотвращает
всасывание пыли и мусора.
Благодаря тщательному выбору высококачественных электронных компонентов,
Контроллер Buildbotics остается прохладным, без вентилятора, даже при движении 6А
двигательные нагрузки. Отсутствие вентилятора не только устраняет шум, но и предотвращает
всасывание пыли и мусора.
Выделенный компьютер
не ТребуетсяТочно настроенный ПК под управлением Mach или LinuxCNC не требуется . Ты можешь получить доступ к встроенному программному обеспечению контроллера Buildbotics с любого устройств и будьте уверены, что ваше ЧПУ будет работать бесперебойно.
Вы даже можете опробовать свои GCode онлайн с помощью нашего бесплатное демо-программное обеспечение.
Быстрый, плавный и точный шаг
Получите максимальную производительность и точность от вашего ЧПУ. Билдботикс контроллер обеспечивает плавную скорость шага до 250 000 в секунду позволяет использовать до 256 микрошагов на высоких скоростях.
Проводная или WiFi-сеть
Контроллер Buildbotics предлагает современный веб-интерфейс, доступный из
браузер через локальную сеть или Wi-Fi. Целая сеть
Контроллерами Buildbotics можно управлять с одного компьютера.
Целая сеть
Контроллерами Buildbotics можно управлять с одного компьютера.
Бесплатное программное обеспечение для моделирования
Все программное обеспечение, необходимое для запуска GCode на вашем станке с ЧПУ, встроено в контроллер Buildbotics, но вы также можете использовать наш бесплатный программное обеспечение для моделирования, чтобы проверить ваш GCode перед его запуском.
ЧПУ CAMotics симулятор вычисляет 3D-превью из GCode. CAMotics также может отправлять GCode напрямую к контроллеру Buildbotics по сети и отслеживайте положение машины во время ее работы.
Управление инструментом
Три различных варианта управления внешними инструментами, такими как шпиндели:
- Цифровое ШИМ-управление
- Двухпроводное управление RS485 VFD
- Аналоговое управление 0–10 В
Внешние нагрузки привода
Цифровые выходы могут переключать внешние драйверы для управления
кровати с подогревом для 3D-принтеров, экструдеров, вакуумных столов или чего-то еще
вы можете подумать. Включайте и выключайте их в своих программах GCode.
Включайте и выключайте их в своих программах GCode.
Для нагрузок переменного тока недорогой ССР можно использовать переключатель. Внешние реле могут использоваться для нагрузок постоянного тока.
Алюминиевый корпус
Благодаря тщательному учету тепла в процессе проектирования Контроллер Buildbotics рассеивает тепло через безвентиляторный алюминиевый корпус корпус без всасывания металлической или деревянной стружки.
Четыре отверстия для винтов позволяют легко установить корпус на машина.
RaspberryPi Inside
Встроенный Raspberry Pi под управлением Linux обеспечивает огромный потенциал для создание следующей большой идеи. Установите дополнительное программное обеспечение на Pi или используйте код Python для создания новых функций.
Протестировано
Контроллер Buildbotics успешно протестирован во многих сборках ЧПУ как нами, так и нашими клиентами.
Снято строительство фрезерного станка с ЧПУ Taig, фрезерного станка с ЧПУ OX, станка K40
ЛАЗЕРНАЯ модернизация и модернизация Dyna Myte 2400.