Схема принцип работы металлоискателя: Принцип работы металлоискателей и их простые схемы.
alexxlab | 19.11.2018 | 0 | Разное
принцип работы, параметры и инструкция
В сегодняшнем обзоре редакции Homius мы расскажем о том, как в бытовых условиях изготовить металлоискатель. Этот прибор довольно распространён среди начинающих археологов и искателей кладов. Прибор имеет достаточную высокую цену, потому многие радиолюбители пытаются собрать изделие сами. Чтобы знать, как изготовить металлоискатель своими руками, следует ознакомиться с общими рекомендациями.
 Изготовление металлоискателя самостоятельно
Изготовление металлоискателя самостоятельноФОТО: bouw.ru
Содержание статьи
Как сделать металлоискатель своими руками
Сегодня множество любителей кладов стараются не приобретать металлодетекторы, а собирать их самостоятельно. Почему-то принято считать, что вещь, которая сделана собственноручно существенно хуже готовых изделий.
 Как показывает практика, качественно сделанный прибор создаёт вполне достойную конкуренцию промышленным металлодетекторам
Как показывает практика, качественно сделанный прибор создаёт вполне достойную конкуренцию промышленным металлодетекторамФОТО: s00.yaplakal.com
Возможно, подобное изделие будет смотреться несколько хуже по эстетическим параметрам, однако в отношении технических показателей он практически не уступит профессиональным.
Как работает металлоискатель – принцип действия
Металлоискатель является электронным прибором, который состоит из первичного индикатора и вторичного узла. Устройства для выявления металлов разделяются на следующие подвиды:
- приборы приёмо-передачи;
- индукционные;
- импульсные;
- генераторные.
Большая часть моделей среднего ценового диапазона считаются приборами по типу «приём-передача». Принцип функционирования довольно простой и основан на поступлении магнитных волн. Основной частью приспособления станут две катушки.
 Передающая катушка создаёт магнитное излучение, проходящее через нейтральную среду
Передающая катушка создаёт магнитное излучение, проходящее через нейтральную средуФОТО: besplatka.ua
Если на пути магнитной волны встретится предмет из металла, он отразится от него, и устройство получит отражённый луч. Сработает сигнал, информирующий об обнаружении цели.
 Индукционный металлодетектор ФОТО: besplatka.ua
Индукционный металлодетектор ФОТО: besplatka.uaДействие индукционного металлодетектора аналогично с приспособлением типа «приём-передача». Основным отличием станет лишь наличие одной катушки, посылающей и принимающей импульс.
Импульсные металлодетекторы невосприимчивы к минерализации почвы. Магнитное поле создаст на верхнем слое предмета из металла вихревые токи. Непосредственно их и будет улавливать устройство.
Генераторные металлоискатели могут быть различных видов. Однако каждый из них имеет основой LC-генератор. Подобные приборы не очень восприимчивы, часто предназначаются для обнаружения металлов лишь 1 вида.
Функциональные и технические параметры металлодетекторов
До того, как приобрести качественный металлодетектор, нужно определиться со средой поисковых работ. Требуется учитывать потенциальные габариты искомых объектов и глубину залегания. Ключевые показатели, на которых делается акцент во время приобретения устройства:
- принцип воздействия;
- частота;
- восприимчивость;
- масса;
- балансировка почвы;
- целеуказание;
- дискриминатор;
- вспомогательный функционал.
Принцип функционирования и рабочая частота являются основными показателями, которые определяют возможности устройства и показывают, к какому классу его можно отнести.
 Есть глубинные изделия, которые предназначаются для обнаружения предметов на глубине 5 м
Есть глубинные изделия, которые предназначаются для обнаружения предметов на глубине 5 мФОТО: bestvix.ru
Какие из металлоискателей подходят для изготовления своими руками дома
К наиболее простым изделиям, которые можно собрать самостоятельно, относят приборы, работающие на приём-передачу.
 В сети присутствует большое количество инструкций с детальным руководством, как собрать простейший металлодетектор
В сети присутствует большое количество инструкций с детальным руководством, как собрать простейший металлодетекторФОТО: electrikmaster.ru
Наиболее популярные виды устройств:
- металлодетектор «Пират»;
- детектор «Бабочка»;
- излучатель без схем;
- металлодетектор «Терминатор».
Но, невзирая на то, что часть мастеров предлагают сборку металлодетектора из телефона, подобные конструкции не смогут пройти проверку «боем».
 Металлоискатель «Пират»
Металлоискатель «Пират» ФОТО: metalloiskatel.org.ua
 Металлоискатель «Терминатор»
Металлоискатель «Терминатор»ФОТО: metalloiskateli.com.ua
Как собрать своими руками металлоискатель «Пират»: подробная инструкция
Модели «Пират» достаточно дорогие, что обусловливается возможностью обнаружения устройством предметов на глубине от 0,2 м (мелкие) и 1,5 м (крупные). Следует рассмотреть особенности конструкции и настройки для поиска металлов.
Материалы, необходимые для сборки своими руками мощного металлоискателя
Металлоискатель «Пират» считается импульсным устройством. Чтобы изготовить прибор, понадобится купить:
- ИМС КР 1006ВИ1, чтобы создать передающий блок;
- транзистор IRF 740;
- ИМС К 157УД2 и транзистор ВС 547, чтобы собрать приёмный узел;
- NPN-транзисторы;
- провод ПЭВ 0,5, чтобы создать катушку;
- материалы, чтобы изготовить корпус и пр.;
- пластину, покрытую листом из меди, чтобы изготовить печатную плату;
- провод;
- изоленту;
- паяльник;
- скальпель;
- отвёртки;
- пассатижи;
- разные типы крепежа.
 Инструменты для сборки
Инструменты для сборкиФОТО: youtube.com
Схемы металлодетектора для изготовления своими руками
Стандартная схема металлодетектора «Пират» строится по микросхеме NE555. Функционирование прибора будет зависеть от компаратора: 1 выход присоединяется к генератору ИМС, 2− к катушке, а выход − к динамику. При выявлении предметов из металла импульс от катушки поступит на компаратор, а затем на динамик.
 Плата размещается в распределительной коробке, которую можно приобрести в магазинах электроники
Плата размещается в распределительной коробке, которую можно приобрести в магазинах электроникиФОТО: youtube.com
Печатная плата своими руками
Если запчасти куплены, есть схема, то требуется собрать всё воедино. Чтобы разместить радиодетали, используют печатную плату, которую возможно без труда изготавливать самому. Потребуется листовой гетинакс, покрытый технической фольгой из меди.
 На заготовку переносят выбранную схему, обозначаются дорожки, которые соединяют детали, сверлятся отверстия
На заготовку переносят выбранную схему, обозначаются дорожки, которые соединяют детали, сверлятся отверстияФОТО: youtube.com
Дорожки покрываются при помощи защитного лака, а после просыхания плата опускается в хлорное железо для травления.
Когда изделие готово, возможно установить и распаять радиодетали. Следующей стадией станет проверка схемы с помощью приборов измерения.
Катушка своими руками для металлоискателя
Металлоискатель «Пират» считается импульсным прибором, потому точность во время сборки катушки не играет ключевой роли. Для основы необходимо кольцо диаметром 20 см, на которое наматывают 25 витков проволоки. Для повышения глубины выявления металла, каркас катушки должен равняться примерно 26-27 см, а число витков – 20-22.
Затем оправка с проводом хорошенько обматывается с помощью изоляции. Готовая катушка помещается внутрь корпуса из диэлектрика. Можно воспользоваться материалами, подходящими по размерам корпуса от неисправной бытовой техники. Подобное даст возможность обеспечить защиту катушки от повреждений при работе с прибором. Окончания обмотки припаивают к многожильному проводу диаметром 0,6 мм.
 Изготовление катушки
Изготовление катушкиФОТО: youtube.com
Как собрать и настроить металлоискатель своими руками
На штанге металлодетектора закрепляется каждый узел устройства. Когда схема надлежащим образом собрана, то настройка приспособления не понадобится, поскольку оно сразу имеет высокую восприимчивость.
Более тонкую настройку выполняют с помощью переменных резисторов R13. Требуемое функционирование металлоискателя обеспечивается при средней позиции регулятора.
 Настройка металлоискателя
Настройка металлоискателяФОТО: youtube.com
Как сделать подводный металлоискатель своими руками
В некоторых случаях поиски переносят с почвы под воду. Существуют, разумеется, спецустройства для функционирования под водой. И, в принципе, можно изготовить глубинный металлодетектор собственноручно. Необходимо взять наиболее простой самодельный прибор и поместить каждый узел в герметично закрытый корпус. Кроме того, требуется несколько видоизменить приспособление и вместо звуковых сигналов установить светоиндикацию.
 Подводный металлоискатель
Подводный металлоискательФОТО: youtube.com
Как сделать своими руками металлоискатель «Терминатор 3» –подробная инструкция
Металлодетектор «Терминатор 3» много лет занимал ведущие места среди самодельных приспособлений. Двухтональное устройство функционирует по принципу баланса индукции.
Его отличительными чертами станут: незначительное потребление электроэнергии, металлодискриминация, опция цветных металлов, функция поиска золота и отличные показатели глубины поиска, в сравнении с полупрофессиональными промышленными изделиями.
Какие инструменты нужны для работы
Прежде чем приступить к работе, требуется приготовить такие инструменты:
- паяльник;
- припой, олово, канифоль;
- пассатижи;
- отвёртки;
- ножовку по металлу;
- осциллографы и прочие измерительные устройства.
 Инструменты для металлоискателя
Инструменты для металлоискателяФОТО: youtube.com
Как собрать схему и подобрать детали
Чтобы изготовить блок управления, требуется сделать специальную плату, где размещены все ключевые радиодетали. Схема переносится на гетинакс с фольгированным покрытием из меди и изготавливается монтажная плата так же, как и в случае с металлоискателем «Пират». Размеры схемы должны находиться в диапазоне 10,4×6,6 см, а заготовка на 1 см больше со всех сторон.
Пошаговое руководство изготовления печатной платы для металлодетектора.
- Берётся текстолитовая пластина с фольгированным медным покрытием. Обезжиривается химическим либо механическим методом.
- Наносится схема на пластинку, дорожки покрываются при помощи защитного лака, и заготовка подвергается травлению. Тонкое сверло проделывает отверстия для радиоэлементов и креплений.
- Размещаются детали согласно схеме, проводится распайка.
- Плата для металлоискателя готова.
 Создание печатной платы
Создание печатной платыФОТО: youtube.com
Изготовление катушки для металлоискателя своими руками
Это наиболее восприимчивая составляющая устройства, ответственная за сканирование площади под землёй. Стадии изготовления обыкновенной катушки для металлодетектора:
- На фанере очерчиваются 2 окружности, которые соответствуют диаметру катушек – внутренней и внешней. Вбиваются по периметру круга гвозди. Диаметр наружной обмотки должен быть в границах 20 см. Катушку делают из 2 сложенных проводов. Они наматываются на гвозди на 30 оборотов.
- Обмотка перевязывается по кругу с помощью нитей. Вытаскиваются гвозди, готовая катушка покрывается лаком. Когда он просохнет, берутся изолента и фольга и обматывается окружность. Аналогично изготавливается внутренняя обмотка, которая вдвое меньше наружной (предполагает 48 оборотов проволоки).
- Помещаются катушки внутрь корпуса, и проводится распайка проводов, присоединяемых к панели управления.
- Рамка для металлодетектора готова.
 Создание катушки
Создание катушкиФОТО: youtube.com
Особенности схемы металлоискателя с дискриминацией металлов
Для облегчения задачи поиска, металлодетекторы оснащают дискриминаторами, дающими возможность различить вид металла и пропустить мусор. Наиболее простые методы выявления реализуются в старых изделиях и приспособлениях начального уровня. Опция дискриминации даёт возможность пользователю среагировать на фазовые сдвиги конкретной величины. В то же время, устройство не способно различить цветные металлы друг от друга. В промышленных приборах используют дискриминаторы с выделением диапазона. Применяемые в таких изделиях процессорные системы дают возможность запрограммировать детектор на реагирование лишь на конкретные подгруппы металлов.
Характерные черты глубинных детекторов
Подобные металлодетекторы способны обнаруживать объекты на больших глубинах. Качественное устройство, которое сделано собственноручно, способно заглянуть на глубину в 6 м. Но в такой ситуации габариты предмета должны быть большие. Лучше других функционируют такие металлоискатели для выявления старых снарядов либо осколков больших размеров.
Есть две разновидности глубинных детекторов: рамочный и приёмопередатчик на штанге. Рамочный охватывает для сканирования большие площади, но, определить точное место залегания искомого предмета в такой ситуации затруднительно. Второй вариант – точечное устройство, работающее целенаправленно вглубь на небольших диаметрах. Работы с ним проводятся неспешно и аккуратно.
Металлоискатель предназначается для выявления предметов, по электрическим либо магнитным параметрам отличающихся от среды, где они находятся. На сегодняшний день множество людей предпочитают изготавливать подобные устройства самостоятельно. Чтобы иметь представление о том, как создать это прибор самому, необходимо иметь определённые навыки.
Если вам понравилась наша статья, обязательно поставьте оценку. Кроме того, мы всегда рады ответить на ваши вопросы, которые можно оставить в форме обратной связи.
ПредыдущаяБытовая техникаФрезерный станок по дереву своими руками: особенности изготовления и подключения
СледующаяДетская5 «золотых» правил ремонта детской, чтобы малыш рос счастливым
Понравилась статья? Сохраните, чтобы не потерять!
ТОЖЕ ИНТЕРЕСНО:
ВОЗМОЖНО ВАМ ТАКЖЕ БУДЕТ ИНТЕРЕСНО:
Принцип работы металлоискателя, обзор технологий, характеристики. Классификация
Иногда импульсные металлоискатели называют аналоговыми. Это верно , но отчасти.
В чем же разница?
Если металлоискатель имеет процессор, который обрабатывает сигнал, то такой металлоискатель называется процессорным.
Если процессора нет, и сигнал никак не обрабатывается, т.е. идет сразу напрямую оператору (в динамик или наушники), то такой металлоискатель называется аналоговым.
катушка металлоискателя генерирует электромагнитные волны
в металлическом объекте под воздействием этих волн возникают собственные вихревые токи
эти вихревые токи порождают собственные электромагнитные волны
эти волны от предмета и регистрирует металлоискатель
Понятно, что приходит отраженный сигнал и от грунта. Но от него он затухает быстрее , чем от цели.
Обычная частота работы таких металлоискателей 0т 50 до 400Гц.
TR-металлоискатели используют при работе 2-е сбалансированные катушки, находящиеся в одной плоскости: одна передает, вторая принимает. Сигнал от первой катушки поступает в грунт, а вторая регистрирует возвращаемя сигнал. По разнице фаз сигнала делается вывод о наличии (или отсутствии) под катушкой цели.
Рабочая частота около 20кГц
VLF принцип работы металлоискателя является на сегодняшний день самым современным. Это разновидность TR- металлоискателя.
Так же имеется две катушки (но к ним предъявляются более жесткие требования, по согласованности), они так же расположены в одной плоскости, одна передает, другая принимает. по фазовому сдвигу делается вывод о наличии цели.
Рабочая частота от 1 кГц до 10кГц.
Это металлоискатели , работающие на том же принципе, что и TR, только частота работы у них выше: от 50 до 500 кГц. А катушки расположены не в одной плоскости , как это было в VLF и TR, а перпендикулярны и разнесенные на определенное расстояние.
Пример такого металлоискателя – Fisher Gemini-3.
(Данный принцип работы известен давно, с 30-х годов)
Есть генератор частоты, есть входящая частота от цели. Производится сравнение 2-х частот. На основании этого делается вывод о наличии цели.
Частота данных приборов от 40 до 500кГц
Соответственно металлоискатели VLF могут быть , как процессорными, так и аналоговыми.
Ниже мы рассмотрим принипы работы металлоискателей. Но не зависимо от того, с помощью чего прибор обнаруживает метал в земле, все металлоискатели можно разделить на процессорные и аналоговые.
Аналоговые и процессорные металлоискатели
Необходимо сразу понять разницу между этими понятиями, т.к. в литературе происходит путаница и замещение одних слов другими.Иногда импульсные металлоискатели называют аналоговыми. Это верно , но отчасти.
В чем же разница?
Если металлоискатель имеет процессор, который обрабатывает сигнал, то такой металлоискатель называется процессорным.
Если процессора нет, и сигнал никак не обрабатывается, т.е. идет сразу напрямую оператору (в динамик или наушники), то такой металлоискатель называется аналоговым.
Пример аналогового металлоискателя- Golden Mask 4WD PRO.
Аналоговые металлоискатели не имеют задержек и сообщают оператору в тот момент, когда цель находится под катушкой. А процессорные имеют задержку. Катушка уже в стороне от цели, а сигнал только пришел.
С этой точки зрения аналоговые металлоискатели предпочтительней, но процессор дает больше возможностей по поиску: дополнительные программы поиска, графическое представление, специальная обработка сигнала для отсева нежелательных помех, как от грунта, так и от целей, которые дискриминируются, кроме того выборочная дискриминация (на аналоговых дискриминация последовательная).
Далее мы будем описывать принципы работы металлоискателей, так вот они могут быть , как процессорными, так и аналоговыми. Вопрос реализации технологии.
Общий принцип действия металлоискателя
В основе всех технологий работы металлоискателя лежит следующий принцип:катушка металлоискателя генерирует электромагнитные волны
в металлическом объекте под воздействием этих волн возникают собственные вихревые токи
эти вихревые токи порождают собственные электромагнитные волны
эти волны от предмета и регистрирует металлоискатель
Далее вопрос встает , как металлоискатель их будет регистрировать и обрабатывать. По разнице фаз, по разнице частот и т.п.
PI-металлоискатель (импульсный)
PI-металлоискатель не все время подает сигнал от катушки в грунт. Он использует импульсы. Сначала он подает сигнал, потом молчит и принимает на ту же катушку сигнал от цели.Понятно, что приходит отраженный сигнал и от грунта. Но от него он затухает быстрее , чем от цели.
Обычная частота работы таких металлоискателей 0т 50 до 400Гц.
TR-металлоискатели
TR-металлоискатели используют при работе 2-е сбалансированные катушки, находящиеся в одной плоскости: одна передает, вторая принимает. Сигнал от первой катушки поступает в грунт, а вторая регистрирует возвращаемя сигнал. По разнице фаз сигнала делается вывод о наличии (или отсутствии) под катушкой цели.
Рабочая частота около 20кГц
VLF/TR – металлоискатели
VLF – Very Low Frequency (Очень низкая частота).VLF принцип работы металлоискателя является на сегодняшний день самым современным. Это разновидность TR- металлоискателя.
Так же имеется две катушки (но к ним предъявляются более жесткие требования, по согласованности), они так же расположены в одной плоскости, одна передает, другая принимает. по фазовому сдвигу делается вывод о наличии цели.
RF-металлоискатели
RF – Radio Frequency (радио частота).Это металлоискатели , работающие на том же принципе, что и TR, только частота работы у них выше: от 50 до 500 кГц. А катушки расположены не в одной плоскости , как это было в VLF и TR, а перпендикулярны и разнесенные на определенное расстояние.
Пример такого металлоискателя – Fisher Gemini-3.
(Данный принцип работы известен давно, с 30-х годов)
BFO-металлоискатели
Такие металлоискатели работают на принципе биений. Старя технология, использовавшаяся в 60-70-х годах.Есть генератор частоты, есть входящая частота от цели. Производится сравнение 2-х частот. На основании этого делается вывод о наличии цели.
Частота данных приборов от 40 до 500кГц
Достоинства и недостатки различных принципов работы металлоискателей
- BFO-металлоискатели – не высокая чувствительность, низкая стабильность, проблемная работа на минерализованных и влажных грунтах.
- TR-металлоискатели – высокая чувствительность, хорошее различение металлов, хорошая балансировка по грунту. Недостаток – при увеличении глубины теряется чувствительность к мелким целям.
- RF- металлоискатели – крайне слаба чувствительность к мелким целям. Применяется в глубинных металлоискателях.
- PI-металлоискатели – нечувствительны к грунту, плохое распознавание целей, высокая энергозатратность.
Соответственно металлоискатели VLF могут быть , как процессорными, так и аналоговыми.
Еще о современных металлоискателях
Дата: Четверг, 12 Января 2017
Металлоискатель по принципу частотомера
Андрей Щедрин, Москва |
Радиохобби 2002`01
Теперь металлоискатель можно купить в виде набора МАСТЕР КИТ NM8041, в который входят все необходимые компоненты для сборки описанного металлоискателя, включая запрограммированный микроконтроллер, печатную плату и другие радиодетали или в виде готового электронного блока BM8041 .
Введение
С давних пор людей привлекают приборы для поиска скрытых металлических предметов. Причины этого интереса различны. Строителей интересует расположение металлической арматуры в стенах, искатели кладов мечтают найти в развалинах старого здания кувшин с золотыми монетами, саперы разыскивают неразорвавшиеся «подарки» прошлых войн. Всех этих людей объединяет желание иметь недорогой, компактный и экономичный прибор, который поможет им обнаружить через слой земли или бетона металлические предметы и, по возможности, определить из какого металла они состоят. Если исключить экзотические методы, вроде лозоискательства и экстрасенсов, то абсолютное большинство таких приборов строится на базе электронных приборов, реагирующих на изменение металлическими предметами электромагнитного поля возбуждаемого поисковым прибором. Наиболее часто в качестве катушки возбуждения и одновременно датчика прибора используется рамочная катушка, состоящая из нескольких сотен витков медного провода и включенная в контур автогенератора. В таких приборах используется тот эффект, что при приближении металлического предмета к катушке изменяется ее индуктивность и, как следствие, частота работы автогенератора. При этом, в общем случае, ферромагнитные предметы (железо, чугун) понижают частоту, а неферромагнитные (медь, золото, алюминий) повышают частоту генерации. Регистрируя величину и знак отклонения частоты, можно сделать заключение о типе металлического предмета, попавшего в зону поиска рамки. Основные различия между большинством типов таких металлоискателей заключаются в способах регистрации изменения частоты. Далее приводится краткое описание наиболее часто используемых способов.
Частотный детектор
Один из самых простых – это прибор, работающий по принципу “срыва резонанса” (OR – Off Resonance). Принцип действия этого прибора основан на использовании частотного детектора на основе колебательного контура. См. рис. 1.
Рисунок 1. Структурная схема OR металлоискателя
Колебательный контур частотного детектора имеет резонансную частоту, близкую к частоте поискового генератора. Изменение частоты генератора приводит к изменению амплитуды сигнала на контуре, что фиксируется помощью индикатора, например стрелочного прибора. Такие приборы не нашли широкого применения. Их недостатки – необходимость обеспечения стабильной амплитуды сигнала на выходе генератора, а также необходимость подстройки резонансной частоты контура из-за влияния дестабилизирующих факторов как на контур поискового генератора, так и на контур частотного детектора.
Метод биений
Другой прибор, – это металлоискатель на биениях (BFO – Beat Frequency Oscillation). Принцип действия такого металлоискателя основан на биениях частоты эталонного генератора и частоты поискового генератора. См рис. 2.
Рисунок 2. Структурная схема BFO металлоискателя
Измерительный и эталонный генераторы настраиваются на одинаковую частоту. При изменении частоты измерительного генератора на выходе смесителя появляется сигнал разностной частоты. Оператор воспринимает этот сигнал на слух или визуально – в зависимости от конструкции. Такие приборы производятся уже несколько десятилетий. Сейчас по такому принципу строятся, в основном, недорогие металлоискатели-игрушки и любительские металлоискатели. Такие приборы имеют ряд недостатков. Первый – это наличие паразитной взаимной синхронизации обоих генераторов. Это приводит к тому, что оказывается невозможным оценить очень малую разность частот и как следствие – существенно снижается чувствительность прибора. Второй недостаток – это отсутствие селекции по типам металлов. Ферромагнитные объекты вызывают понижение частоты, а металлические неферромагнитные – повышение частоты измерительного генератора. Однако после смесителя в BFO металлоискателе информация о знаке ухода частоты теряется.
Частотный детектор на основе ФАПЧ
Следующий прибор (PLL – Phase Locked Loop) – это прибор, в котором недостаток металлоискателя на биениях используется во благо. В таком приборе оба генератора, измерительный и эталонный, работают строго на одной частоте. Причем частота измерительного генератора подстраивается под частоту эталонного генератора с помощью системы ФАПЧ. См. рис. 3.
Рисунок 3. Структурная схема PLL металлоискателя.
Сигнал напряжения подстройки используется для определения величины и знака изменения частоты. Такие металлоискатели обладают селекцией по типам металлов. Существует несколько радиолюбительских конструкций такого типа [2]. К недостаткам таких приборов можно отнести следующее – наличие “полезной” ФАПЧ не исключает наличия паразитной взаимной синхронизации обоих генераторов, как и в приборе на биениях. Это приводит к тому, что уменьшается крутизна регулировочной характеристики, и как результат уменьшается дальность обнаружения.
Цифровой частотометр
Идея использования цифрового частотомера для регистрации ухода частоты измерительного генератора не нова [3]. Такой металлоискатель (FM – Frequency Meter см. Рис.4.) свободен от большинства недостатков, присущих предыдущим схемам. Его принцип действия заключается в следующем:
Сначала электронный частотомер оценивает частоту измерительного генератора, когда датчик находится вдали от объектов поиска. Это значение заносится в запоминающий регистр. Затем, в процессе поиска, частотомер непрерывно измеряет текущую частоту измерительного генератора. Из полученных значений вычитается значение эталонной частоты, и результат подается на устройство индикации. Очевидно, что в такой конструкции эффект паразитной взаимной синхронизации генераторов будет выражен значительно слабее – ведь теперь частота измерительного генератора (единицы-десятки килогерц) на несколько порядков ниже частоты опорного генератора (десятки мегагерц). С помощью частотомера можно измерить не только величину ухода частоты измерительного генератора, но и ее знак, следовательно, такой металлоискатель обладает селективностью по типам металлов.
Рисунок 4. Структурная схема FM металлоискателя
Однако реализация этой идеи “в лоб”, как это сделано в [3], не позволяет получить реальную чувствительность, большую чем в приборе на биениях. Это связано с тем, что невозможно напрямую в реальном масштабе времени (20…40 мс на один отсчет) регистрировать очень малые уходы частоты (единицы и доли герц). Нам удалось решить эту проблему [4] следующим образом – из теории радиоизмерений известен метод “быстрого” измерения низких частот – т.н. метод обратного счета. В этом методе измеряется период сигнала, а частота вычисляется как его обратная величина. Оставалась только задача практической реализации.
Практическая конструкция металлоискателя
Очевидно, что если реализовывать такое устройство на элементах средней степени интеграции, то получится сравнительно сложный и громоздкий прибор, что для мобильного исполнения нежелательно. Выходом из этой ситуации стало применение микроконтроллера. На микроконтроллер оказалось возможно возложить не только задачу по измерению периода, но и практически все функции по обработке результатов – вычисление разности частот, звуковую и световую индикацию результатов измерений. Наш металлоискатель реализован на микроконтроллере AT90S2313-10PI производства фирмы Atmel.
Это 8-битный экономичный RISC микроконтроллер. Имеет на частоте 10 MHz производительность 10 MIPS. Содержит: 2 кБ флэш памяти, 128 байт EEPROM, 15 линий ввода/вывода, 32 рабочих регистра, два таймера/счетчика, сторожевой таймер, аналоговый компаратор, универсальный последовательный порт. Более подробно с семейством AVR микроконтроллеров можно ознакомиться на WWW-сайте производителя. [5].
Основные технические характеристики металлоискателя
Напряжение питания | 5,5-20 В |
Потребляемый ток | 15 мА |
Индикация | световая – 7 светодиодов и звуковая |
Режимы поиска | статический и динамический |
Дискриминация | ферромагнетики/неферромагнетики |
Глубина обнаружения (на воздухе): | |
Монета диаметром 25 мм | 11 см |
“Пистолет” | 17 см |
“Каска” | 37 см |
Hex-код прошивки контроллера металлоискателя.
Принципиальная схема
Принципиальная схема металлоискателя по принципу частотомера изображена рис.5.
Рисунок 5. Принципиальная электрическая схема металлоискателя
Измерительный генератор построен на таймере D1 NE555. Она используется в несколько необычном включении – в качестве LC генератора. Колебательный контур генератора состоит из конденсаторов C1,C2 и катушки индуктивности датчика. Резонансная частота контура определяется как
где C – это последовательное соединение конденсаторов C1 и C2. Так как микроконтроллер автоматически подстраивается под частоту измерительного генератора, в схеме не предусмотрена подстройка частоты генератора. При использовании датчика диаметром 190 мм (100 витков) и емкостях конденсаторов С1=0.047 F и C2=0.01 F частота составит около 20 кГц. При необходимости ее можно изменить, заменив конденсаторы C1, C2. При этом желательно чтобы их емкости находились в соотношении примерно (4…6): 1.
На микроконтроллер D2 возложены все остальные функции по обработке сигнала измерительного генератора вплоть до индикации. В данной схеме применен микроконтроллер AT90S2313, описанный выше. Исполнение Industrial (температурный диапазон -40C…+85C). Это сделано из соображений, чтобы прибор мог эксплуатироваться в полевых условиях при отрицательных температурах. Непосредственно к микросхеме микроконтроллера подключены как органы управления, так и органы индикации. В металлоискателе реализованы два режима работы, которые задаются при помощи переключателя S1 – статический и динамический. В статическом режиме сигнал, который представляет собой цифровой код разности частот, логарифмируется и сразу подается на индикацию. Каждый уровень световой индикации сопровождается своим тоном звуковой индикации.
Динамический режим предназначен для поиска мишеней в сложных условиях, на фоне помех от грунта, минералов и т.д. В динамическом режиме сигнал подвергается цифровой фильтрации, которая выделяет полезный сигнал на фоне мешающих сигналов. В своем приборе мы применили оптимальную согласованную фильтрацию. Вкратце ее суть заключается в том, что для любого сигнала существует оптимальный фильтр, позволяющий получить максимальный отклик на выходе фильтра. Мы реализовали такой цифровой фильтр для сигнала расстройки частоты, который возникает при движении поисковой катушки над мелкими мишенями со скоростью 0.5-1 м/c. Фильтр реализован программно.
При помощи переменного резистора R6 регулируется чувствительность прибора. Светодиоды VD1…VD3 индицируют уровень отклонения частоты измерительного генератора в случае преобладания ферромагнитного эффекта. Светодиоды VD5…VD7 – в случае преобладания эффекта проводимости. Светодиод VD4 указывает на нулевой сдвиг частоты. Наушник Y предназначен для звуковой индикации отклонения частоты сигнала измерительного генератора.
Схема содержит рекордно низкое количество деталей. При этом к ним не выдвигается особых требований. Микросхему AT90S2313-10PI можно заменить на AT90S2313-10PC, однако, в этом случае не гарантируется работа при температуре меньше 0C. (что вполне может быть в полевых условиях).
Микросхему D1 можно попробовать заменить на КР1006ВИ1. Светодиоды желательно выбирать с повышенной яркостью свечения. Стабилизатор D3 можно заменить на К1184ЕН1 или, что несколько хуже – 78L05. В последнем случае минимально допустимое напряжение батареи составит 6,7 В. К резисторам особых требований не предъявляется. Они могут иметь рассеиваемую мощность 0,125-0,25 Вт.
Конденсаторы C1 и C2 – должны иметь минимальный ТКЕ, особенно C2. К остальным конденсаторам не предъявляется особых требований.
Наушник Y (или наушники) можно взять от плеера. Возможно потребуется подобрать номинал резистора R3 для получения приемлемой громкости. В крайнем случае, наушник можно заменить на пьезоизлучатель.
Конструкция корпуса прибора может быть достаточно произвольной.
Внешний вид металлоискателя, собранного из набора МАСТЕР КИТ NM8041, можно посмотреть на рис. 6. В комплект набора входят все необходимые компоненты для сборки описанного металлоискателя, включая запрограммированный микроконтроллер, печатную плату, наушники и разъемы для батарей. В ближайшее время в комплект набора будет входить корпус.
Рисунок 6. Внешний вид металлоискателя, собранного из набора МАСТЕР КИТ NM8041.
Особо следует остановиться на конструкции поисковой катушки – она может быть реализована различными способами [1]. Основные требования к ней – жесткость конструкции, герметичность и наличие электростатического экрана. Можно предложить следующую технологию изготовления катушки:
Берется доска подходящего размера и на ней рисуется окружность диаметром 190 мм. Затем равномерно по окружности в доску забиваются небольшие гвозди – 15…20 штук. На эти гвозди наматывается 100 витков эмалированного провода диаметром 0.3 – 0.56 мм. После намотки гвозди извлекаются или подгибаются и катушка снимается с оправки. Следующий этап – обмотка катушки изолентой. Обмотка ведется внахлест. См. рис.7
Рисунок 7. Обмотка катушки липкой лентой
Аналогичным образом поверх слоя из липкой ленты наносится слой из алюминиевой фольги, служащий экраном обмотки датчика. Для этого фольга нарезается на полосы шириной около 10 мм. Для предотвращения образования короткозамкнутого витка, снижающего добротность контура, обмотка из фольги должна занимать не всю поверхность кольца обмотки датчика – от фольги оставляется свободным небольшой участок длиной 10-20 мм. Отвод от экрана выполняется луженым одножильным проводом, который закрепляют узлом поверх экрана. В завершение, кольцо обмотки датчика обматывают еще одним слоем липкой ленты по все поверхности, выпустив наружу выводы обмотки и экрана. К этим выводам подпаивается экранированный кабель, который соединяет катушку с металлоискателем. Жесткость катушке можно придать различными способами. Один из них – подобрать подходящий корпус, например, взять крышку от набора пластиковой посуды, поместить в него катушку и залить эпоксидной смолой. Предварительно необходимо проделать в корпусе отверстие и продеть в него кабель. Также на корпусе катушки необходимо предусмотреть крепление для штанги.
Расположение элементов на печатной плате и рисунок печатной платы (М1:1) приведены на рис.8 и рис.9.
В настоящее время МАСТЕР КИТ выпускает радиолюбительский набор NM8041, в который входят все необходимые компоненты для сборки описанного металлоискателя, включая запрограммированный микроконтроллер, печатную плату и другие радиодетали, а также уже собранный электронный блок BM8041 . Набор и блок можно купить в магазинах радиодеталей, адреса которых опубликованы на сайте www.masterkit.ru
Рисунок 8. Расположение элементов на печатной плате.
Рисунок 9. Вид печатной платы
Настройка прибора
Можно предложить следующий порядок настройки прибора.
- Проверить правильность монтажа схемы и подать питание.
- Измерить потребляемый ток. Он должен быть не более 15 мА.
- Убедиться, что на выводе 3 микросхемы D1 присутствует меандр расчетной частоты (около 20 кГц для указанных выше номиналов конденсаторов C1 и C2 и стандартного датчика)
- Удалить рамку прибора подальше от металлических предметов и нажать кнопку S0 «Сброс».
- Убедиться в работоспособности органов индикации, поднося к датчику различные металлические предметы.
Работа с прибором
Если переключатель S1 замкнут, то прибор переходит в статический режим. В этом режиме при приближении катушки к ферромагнитной мишени начинают последовательно загораться светодиоды VD3, VD2, VD1. Если катушку приближать к неферромагнитному металлическому объекту, то будут последовательно загораться светодиоды VD5, VD6, VD7. К сожалению таким же образом прибор реагирует на железные предметы с большой площадью поверхности (например, консервная банка). Это связано с тем, что при воздействии на поисковую катушку в металлических ферромагнитных объектах возникает сразу два эффекта [1] – эффект проводимости и ферромагнитный эффект. При некотором соотношении площади поверхности объекта к объему начинает преобладать эффект проводимости.
При размыкании переключателя S1 прибор переходит в динамический режим. В этом режиме катушка должна перемещаться над грунтом со скоростью примерно 0.5-1 м/с. Местонахождение объекта в динамическом режиме находится методом “артиллерийской вилки” при проведении катушки над объектом дважды – слева направо и справа налево. В этом режиме важно почувствовать наименьшую скорость, с которой можно перемещать катушку. Это легко осваивается при недолгой тренировке. Индикация в динамическом режиме выглядит немного иначе. При передвижении катушки над ферромагнитным объектом сначала загораются светодиоды из “шкалы” VD5, VD6, VD7, а затем из “шкалы” VD3, VD2, VD1. При передвижении катушки над неферромагнитным объектом индикация работает наоборот.
Как уже было указано выше, каждому светодиоду соответствует свой тон звуковой индикации. После непродолжительной работы с металлоискателем запоминаются “напевы”, характерные для разных типов мишеней. Это позволяет при поисках пользоваться преимущественно звуковой индикацией, что довольно удобно.
Перед началом работы в обоих режимах необходимо выставить оптимальную чувствительность прибора с помощью переменного резистора R6. Он выставляется в такое положение, когда прибор начинает индицировать ложные отклики. Затем медленно вращая ротор этого резистора, необходимо добиться исчезновения этих ложных срабатываний.
При прочих равных условиях динамический режим за счет фильтрации позволяет достичь лучшей чувствительности по сравнению со статическим режимом. Однако статический режим также бывает иногда необходим. Например, необходимо проверить дно узкой ямы. В этом случае нет возможности осуществлять горизонтальные качания поисковой катушки, которые необходимы для динамического режима. Здесь выручит статический режим.
Во время полевых испытаний металлоискатель показал неплохие результаты [6].
СПИСОК ИСТОЧНИКОВ ИНФОРМАЦИИ
- Щедрин А.И., Осипов И.Н., Металлоискатели для поиска кладов и реликвий. – “Горячая линия – Телеком”.- М.: “Радио и связь”, 2000.
- Все, что вы хотите знать о металлодетекторах” http://metaldetector.bratsk-city.ru
- V. Velchev, Using PIC12CXXX as a Sensor Interface for Metal Detection, Microchip Technology Inc. DS40160A/3_007, 1997.
- A.Chtchedrine, Y.Kolokolov , Frequency Meter Metal Detector, Circuit Cellar Magazine N130, May 2001.
- Atmel corp. – http://www.atmel.com
- “Домашняя страница Юрия Колоколова” http://home.skif.net/~yukol
Источник – http://www.masterkit.ru/info/magshow.php?num=19
Локационный металлоискатель
Зарубежные фирмы производят большое количество маталлоискателей с различными характеристиками и стоимостью, причем в рекламе, как правило, заявляются параметры, значительно превышающие реальные. Речь идет о предпродажной рекламе при покупке приборов.
По рассказам владельцев МИ, купленных за рубежом, обычно продавец демонстрирует дальность обнаружения в воздухе, поднося к датчику золотое кольцо, при этом приборы регистрируют его на расстоянии 15-20 см, на глаз, в зависимости от модели, а по остальным параметрам делается ссылка на красочный рекламный проспект или щит, установленный в салоне магазина.
Кольцо из золота или меди является очень удобным объектом для демонстрации, так как представляет собой короткозамкнутый виток из материалла с высокой электропроводностью, и сигнал от него может быть больше, чем от монеты такого же диаметра.
В то же время в документации, прилагаемой к прибору, вообще, отсутствуют основные характеристики по глубине обнаружения различных объектов, зато содержится большое количество второстепенной информации, например: наличие автоматического контроля напряжения питания, автоматическая и ручная настройки, VLF – 10 кГц (рабочая частота), наличие четверть-дюймового разъема типа “джек” для подключения головных телефонов, режим “все металлы”, режим “дискриминации”, датчик диаметром 6 дюймов, масса 3,75 фунта, питание от 8 батарей размера АА, срок службы батарей при использовании телефонов – 15 ч, без телефонов – 25 ч и т.д.
При поиске информации в сети Интернет по изделиям известных фирм “Garrett”, “Discovery”, “Fisher”, “White’s” выявилась та же тенденция – в основном приведена второстепенная информация, и лишь после получения более чем 20 описаний были обнаружены параметры дальности на некоторые небольшие объекты МИ White’s ULA-3.
Например, дальность обнаружения: свинцовая пуля 22 калибра – мин. 0,5″…макс. 6″ свинцовая пуля 32 калибра – мин. 1,5″…макс. 7,5″ Конечно, 6″ и 7,5″ – весьма неплохие параметры для объектов столь малого размера, но почему такой разброс минимум – максимум?
Владельцы зарубежных приборов довольно неохотно предоставляют их на испытания ввиду их высокой стоимости, но все же основные параметры двух МИ удалось измерить. Прибор Discovery (номер модели на корпусе отсутствует) стоимостью 9 медную монету Ж25 мм обнаруживал на расстоянии 15-16 см, стальную пластину 400х400х4 – на 55-60 см.
МИ White’s-XLT стоимостью 9 обнаруживал монету на 26-27 см, а стальную пластину на 65-70 см (измерения параметров обоих приборов проводились в воздухе). При этом в рекламе на последний МИ сообщалось, что прибор обнаруживает металлическое ведро (площадь проекции и масса которого явно меньше, чем у пластины 400х400х4 мм) на расстоянии 1 м 80 см, а большие объекты – до 3 м.
В результате обсуждения реальных характеристик МИ с немногочисленными их обладателями установлено, что приборы стоимостью от 300 до 500$ обнаруживают монеты на глубине до 15 см, а крупные объекты размером 1х1 м и более – до 1 м; приборы стоимостью от 600 до 900$ обнаруживают монеты на глубине до 25 см, а большие объекты – до 1,2-1,5 м, причем увеличение размеров объекта свыше 1х1 м на глубине обнаружения практически не сказывается (что 1х1 м, что 3х5 м – все равно). Информацию о реальных характеристиках более дорогих приборов получить не удалось.
Как правило, владельцы фирменных МИ не удовлетворены соотношением цена/параметры, по аналогии с изречением в известном кинофильме можно сказать: “… каждый любитель поиска, у которого нет металлоискателя, мечтает его купить, а каждый, кто имеет, мечтает его продать”.
Описываемый локационный МИ не имеет столь большого разнообразия режимов работы по сравнению с зарубежными (например, существуют режимы селекции и дискриминации различных металлов), но доступен для повторения и позволяет получить основные характеристики несколько выше параметров локационных приборов начального уровня.
Описания конструкций локационных приборов в отечественной технической литературе встречаются крайне редко. Практически их полный перечень за последние 30 лет приведен в [1-5]. Кроме того, повторяемость этих приборов весьма различна.
Так, конструкция украинских авторов В.Ф. Бахмутско-го и Г.И. Зуенко [1, 2] имеет большую глубину обнаружения объектов среднего и большого размера, однако в обоих описаниях отсутствует полная информация для повторения.
Металлоискатель (МИ), описанный в [3, 4] (так называемая “схема Флинда”), обладает более “скромными” параметрами, но даже при тщательном изготовлении в соответствии с рекомендациями автора различные образцы приборов имеют большой разброс по дальности обнаружения.
В недавно вышедшей книге московского автора А. Щедрина [5] на два из трех описанных МИ заявлены довольно высокие характеристики, однако их могут повторить только высококвалифицированные радиолюбители, имеющие опыт проектирования малошумящих усилительных устройств, узлов синхронного детектирования и прецизионной измерительной техники.
К достоинствам книги можно отнести анализ реальных возможностей МИ по глубине обнаружения и селективности для различных металлов по сравнению с данными изготовителей.
Предлагаемый для повторения локационный МИ является переработанным и модернизированным вариантом “схемы Флинда”. Прибор выполнен по структурной схеме [6, рис.6] и реализует принцип “передатчик-приемник”.
Для выделения слабого сигнала вторичного поля от объекта поиска на фоне сильного сигнала первичного поля передатчика используется метод “индуктивного баланса” в датчике путем компланарного расположения D-образных передающей и приемной магнитных антенн (МА) [6, рис.1 ,в] с частичным перекрытием, а также метод статической и адаптивной компенсации постоянной составляющей сигнала на выходе детектора приемника.
Анализ схемы прототипа [3, c.70; 4, c.179] позволил установить причину большого разброса по чувствительности различных образцов МИ по “схеме Флинда”. При использовании однополярного источника питания (+12 В) для формирования искусственной “средней точки” в первом узле приемника – усилителе D1 и во втором – амплитудном детекторе D2 были использованы делители напряжения на двух резисторах равного сопротивления.
При определенном “набеге отклонений” величин даже пятипроцентных резисторов от номинального значения возникало ограничение выпрямленного сигнала по минимуму, что приводило к появлению нерегулируемого высокого порога срабатывания МИ. В результате некоторые приборы имели чувствительность даже меньшую, чем простые МИ параметрического типа, а лучшие образцы регистрировали медный диск Ж25 мм на расстоянии до 15 см и крупные предметы размерами 100х100 см2 – до 1 м в воздухе.
В модернизированном варианте МИ было решено применить двухполярное питание приемной и регистрирующей частей схемы, однополупериодный детектор – выпрямитель заменен на двухполупериодный, генератор передатчика выполнен по схеме, обладающей лучшей температурной стабильностью, к узлу статической регистрации объектов добавлен узел адаптивной регистрации с выходом на стрелочный измеритель с нулевой отметкой в центре шкалы, помимо звуковой применена световая индикация срабатывания обоих регистрирующих узлов.
В результате получены следующие характеристики по максимальной дальности (глубине) обнаружения различных объектов:
- Медный диск 025х1 мм 20 (15-18) см ;
- Стальная пластина 100х100х2 мм 40 (30-35) см ;
- Стальная пластина 400х400х4 мм 80 (70-75) см ;
- Крышка люка 0600х30 мм 100 (90-95) см.
Глубина обнаружения в грунте (значения указаны в скобках) на 2-10 см меньше, чем в воздухе и зависит от расстояния между плоскостью датчика и поверхностью грунта, которое необходимо выдерживать при поиске для исключения ложных срабатываний прибора. При работе на грунтах с низкой влажностью и низким содержанием солей, ржавчины и других токопроводящих примесей это расстояние может быть минимальным (2-3 см), в противном случае это расстояние необходимо увеличить до 8-10 см.
Передатчик-приемник
Генератор передатчика выполнен по классической схеме “емкостной трехточки” на одном из транзисторов сборки VT1, второй в диодном включении используется для температурной компенсации режима работы первого. Частота генерации 3 кГц ± 20%. Несмотря на применение маломощной транзисторной сборки, напряженность магнитного поля в центре передающей магнитной антенны (МА) с количеством витков, равным 90, и эффективным диаметром 140 мм достигает 40-50 А/м.
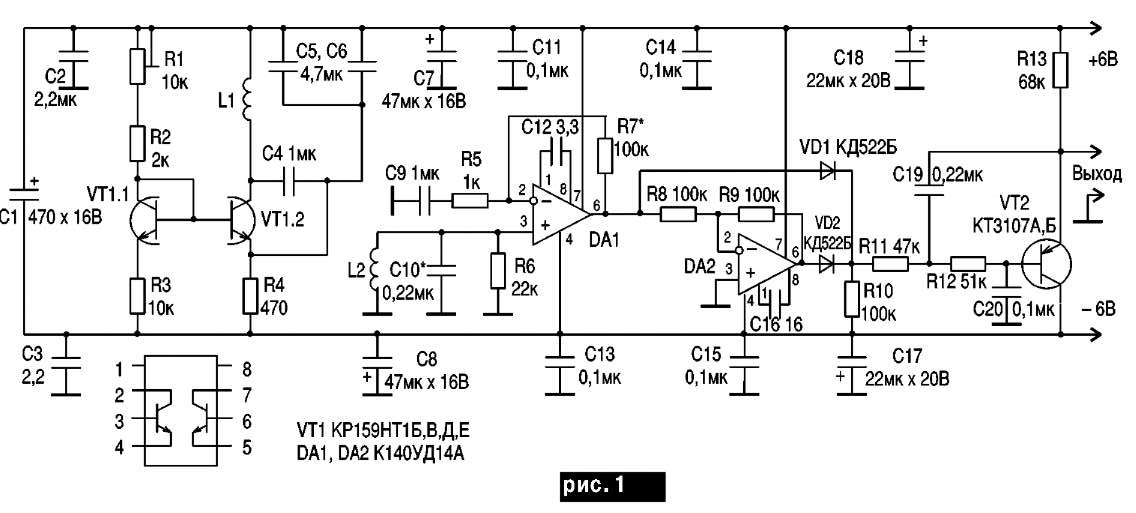
Рис. 1. Схема передатчика и приемника локационного металлоискателя.
Передающая МА L1 и приемная L2 катушки, расположенные в датчике, подключены к электрической части с помощью двухпроводных экранированных кабелей (на схеме не показаны), причем выводы экранов обоих кабелей должны быть соединены между собой как в датчике, так и в схеме и подключены к общему проводу. При необходимости можно применить разъемное соединение в электронном блоке. Катушка L1 имеет 90 витков провода ПЭЛ 0,45, а L2 – 180 витков ПЭЛ 0,29.
Входной сигнал приемника, выделяющийся на резонансном контуре L2C10, поступает на усилитель DA1 с КУ>> 100 и затем – на двухполупериодный амплитудный детектор VD1, DA2, VD2. Выпрямленное напряжение проходит через активный фильтр НЧ 2-го порядка на R11, C19, R12, C20, на VT2, с выхода которого снимается постоянная составляющая, величина которой пропорциональна векторной сумме остаточного сигнала первичного поля и сигнала от объекта поиска.
Линейность выпрямления сигнала обеспечивается постоянным микротоком, протекающим через R10, VD1, VD2, возникающее при этом постоянное смещение на обоих диодах и его температурный дрейф компенсируются соответствующим включением VT2 структуры p-n-p.
Регистратор
Напряжение с выхода активного фильтра приемника поступает на вход блока регистрации. Узел статической регистрации выполнен на ОУ йА3, включенном в режиме компаратора. На его неинвертирующий вход сигнал поступает через ФНЧ R18C23, а на инвертирующий – напряжение статической компенсации, определяемое положением регуляторов R14 (“Порог-точно”) и R16 (“Порог-грубо”).
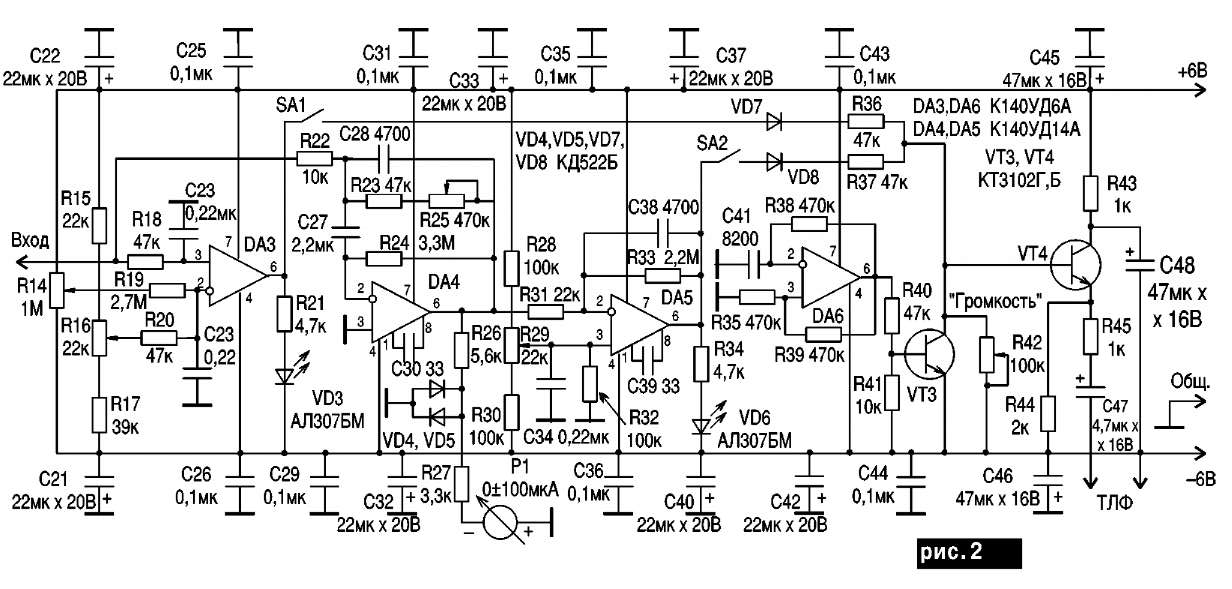
Рис. 2. Схема регистратора для самодельного локационного металлоискателя.
Компенсирующее напряжение устанавливают с некоторым запасом, большим, чем постоянное смещение на выходе активного фильтра. Таким образом, осуществляется компенсация остаточного сигнала первичного поля, а также помех и дрейфов на выходе приемника. В этом случае напряжение на выходе DA3 отрицательное и индикатор VD3 не работает.
При попадании в зону действия прибора металлического объекта напряжение на входе регистратора возрастает, и когда оно превысит компенсирующее напряжение, произойдет срабатывание DA3 и индикатора VD3. Статическая регистрация происходит по принципу “Есть/Нет” или “1/0” независимо от времени нахождения объекта поиска в зоне действия МИ.
На ОУ DA4 и DA5 выполнен узел адаптивной регистрации. На DA4 реализован усилитель с автоматической коррекцией “нуля” на выходе. При появлении сигнала от объекта стрелка прибора Р1 сначала отклоняется вправо, затем через некоторое время возвращается к “нулю”, при удалении объекта стрелка отклоняется влево и затем – опять к “нулю”.
По сути, адаптивный усилитель представляет собой ФВЧ с очень низкой (доли герца) частотой среза, осуществляющий дифференцирование сигнала. К выходу DA4 подключен усилитель-компаратор на DA5 с регулируемым порогом срабатывания.
В отличие от компаратора DA3 регулятором R29 (“Порог адап.”) компенсируется только небольшая часть помех и дрейфов, а их основное подавление осуществляет адаптивный усилитель, кроме этого, коэффициент усиления DA5 намного меньше, чем DA3, поэтому сигнал регистрации на выходе DA5 нарастает более плавно, что позволяет при работе со звуковой индикацией различать на слух срабатывание разных регистрирующих узлов.
Узел звуковой индикации выполнен на DA6, VT3, VT4, где DA6 – генератор звуковой частоты: VT3 и VT4 – управляемый усилитель, имеющий выход на головные телефоны. Усилитель имеет два управляющих входа, которые через SA1 и SA2 можно подключать к выходам обоих регистрирующих узлов. Громкость можно регулировать потенциометром R42 (“Громкость”).
Стабилизатор (рис.3)
Питается МИ от любого источника постоянного тока напряжением 18 В через стабилизатор DA7 и формирователь “искусственного общего провода” DA8. Общий ток потребления не превышает 30-35 мА.
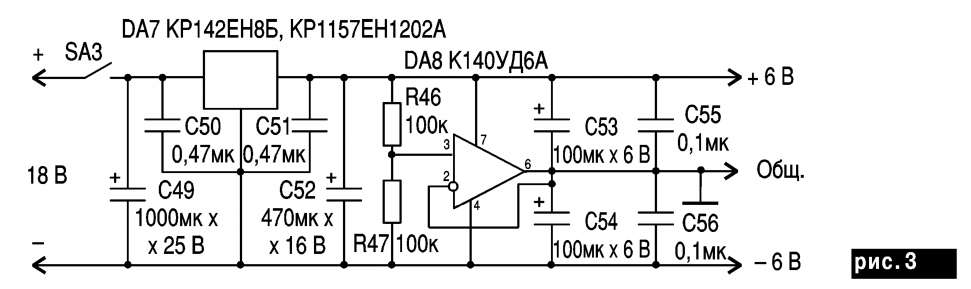
Рис. 3. Схема двуполярного стабилизатора напряжения для металлоискателя.
К стабилизатору DA7 предъявляют довольно высокие требования как по коэффициенту стабилизации, так и по выходному сопротивлению рвых<0,15 Ом). Из-за наличия в продаже большого количества интегральных схем с отклонениями от ТУ может потребоваться их отбор.
Конструкция и детали электронного блока
Локационный МИ обладает довольно высокой чувствительностью, так, коэффициент усиления сигнала от входа приемника DA1 до выхода регистратора DA5 может достигать 500000: Кух = КУDA1КУDA4КУDA5 = 100х50х100 = 500000.
При изменении напряжения на выходе DA5 на 5 В, что соответствует увеличению громкости звуковой индикации от минимума до 70 % максимальной, будет соответствовать увеличение сигнала на входе приемника всего на 10 мкВ.
Поэтому практически все элементы схемы должны иметь высокую стабильность параметров. В сигнальных цепях приемопередатчика можно применять только пленочные конденсаторы (например, К73-17 или аналогичные) – С4, С5, С6, С9, С10, С19, С20. Применение керамических емкостей необходимо в цепях блокировки питания, а также в узлах регистратора. Электролитические конденсаторы желательно применять типов К52-1, К53-1, К53-4, К53-14, К50-24, К50-29, регулировочные резисторы типов СП4-1, СП4-2 или СП3-9 а, в.
Электрическая схема выполнена на печатной или макетной плате из фольгированного стеклотекстолита с шириной проводников питания не менее 2 мм, а ширина общего провода не менее 5 мм. В случае разделения электрической части на несколько плат шины питания и общего провода соединяют между собой гибкими многожильными проводниками сечением не менее 0,5 мм2.
Блокирующие керамические и электролитические конденсаторы в цепях питания распределяются равномерно по всем каскадам и узлам схемы. В генераторе передатчика можно применять сборку К159НТ1Б, В, Д, Е как в пластмассовом, так и в металлическом корпусе, однако их цоколевка различается.
В качестве DA1, DA2, DA3, DA5, DA6, DA8 можно применять ОУ 140УД7,140УД18, 140УД22 в любом исполнении, в этом случае возрастет ток потребления схемы.
В качестве DA4 также можно применять 140УД17 или в крайнем случае 544УД1, 140УД18, 140УД22, при этом потребуется подключение цепей коррекции напряжения смещения нуля. В качестве Р1 можно применить любой измерительный прибор с диапазоном 0 ± 50…0 ± 100 мкА.
Узел звуковой индикации DA6, VT3, VT4 и регулятор громкости R42 следует располагать на расстоянии не менее 5 см от входной цепи приемника, а элементы генератора передатчика, наоборот, следует расположить поближе ко входной цепи, отделив их экраном в виде пластины 50х30 мм2 из тонкой меди или фольгированного стеклотекстолита, соединенной с общим проводом или минусом питания.
Экранировать всю электрическую схему необязательно, главное – обеспечить жесткость всей конструкции, исключающую колебания элементов схемы и соединительных проводников.
Элементы стрелочной и световой индикации, а также органы управления можно разместить в отдельном блоке, соединив его с основной частью кабелем из экранированных проводов.
Поисковая катушка (датчик)
Датчик МИ состоит из двух D-образных машинных антенн (МА) в виде экранированных катушек, размещенных на противоположных плоскостях диска 0 250-260 мм, толщиной 2 мм из текстолита или стеклотекстолита (рис.4,а,б).
Катушки наматывают на D-образном каркасе из медных штырей 0 2-3 мм, закрепленных на деревянной доске. Диаметр полукруглой части 180 мм, а прямолинейная часть каркаса отстоит от центра окружности на 12-13 мм.
Передающая катушка содержит 90 витков провода ПЭЛ-0,45, приемная – 180 витков ПЭЛ-0,29. При отсутствии проводов указанных марок можно использовать другие в лаковой изоляции: для передающей МА провод 0 0,4-0,5, для приемной провод 0 0,27-0,3 мм.
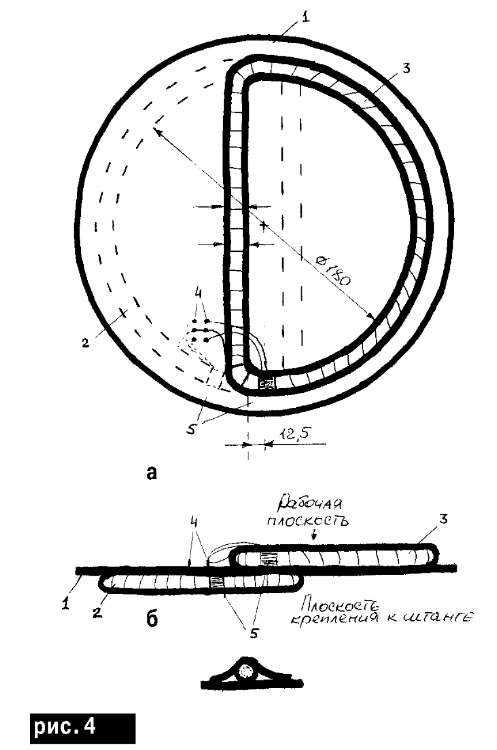
Рис. 4. Конструкция поисковой катушки самодельного локационного металлоискателя.
После намотки катушки в нескольких местах скрепляют клейкой лентой и снимают с каркаса. Выводы проводников пропускают через ПВХ трубки длиной 40-60 мм и катушки по периметру обклеивают такой же клейкой лентой.
Статическое экранирование обмоткой катушки осуществляется алюминиевой фольгой на бумажной или полимерной основе шириной 8-10 мм с зазором 5-8 мм между началом и концом обмотки 5 (рис.4) на участке расположения выводов проводов. Вывод от экрана – неизолированным медным или медным с токопроводящим покрытием проводом Ж 0,4-0,5 мм, обмотанным вокруг всего экрана с шагом 5-15 мм.
Балансировку катушек выполняют в несколько этапов, начиная с процесса изготовления датчика. Передающую катушку 2 (рис.4,а,б) временно закрепляют с одной стороны диска 1 клейкой лентой и подключают к выходу звукового генератора с напряжением ~10 B и частотой 3 кГц через резистор сопротивлением 510-680 Ом.
Приемную катушку 3 подключают ко входу осциллографа и располагают с противоположной стороны диска. Передвигая катушку 3 по поверхности диска, определяют зону ее примерного расположения по минимуму сигнала на ее выводах (рис.5,а), при необходимости меняют расположение передающей катушки и проводят грубую балансировку повторно.
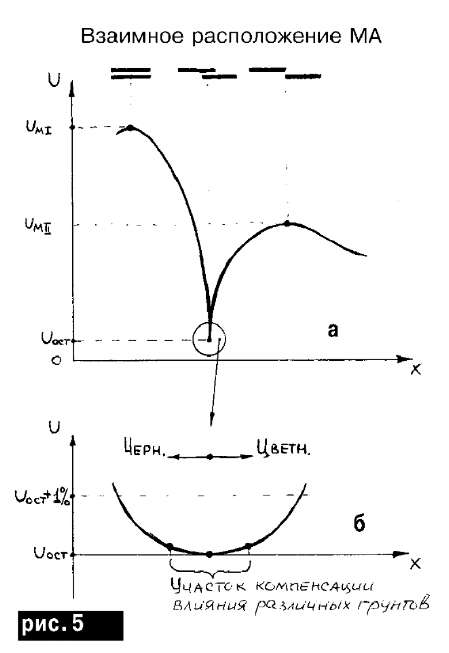
Рис. 5. Диаграммы сигналов.
Отмечают расположение обеих катушек, затем приклеивают передающую катушку по ее контуру к поверхности диска минимальным количеством клея (например, 88Н или “Момент”) и ставят под пресс с усилием 2-3 кг. После высыхания клея окончательно приклеивают передающую катушку эпоксидным клеем с армированием сверху кусочками ткани размером 25х50 мм2, пропитанной этим же клеем (рис.4,в).
Со стороны передающей катушки приклеивают элементы крепления к штанге МИ, конструкция которого может быть произвольной, обеспечивающей максимальную жесткость датчика и выполненной из диэлектрических материалов. Опять уточняют местоположение приемной катушки, но приклеивают под прессом только ее полукруглую часть клеем 88Н или “Момент”.
В указанном на рис.4,а месте просверливают 6 отверстий для контактных штырей 4 из медной проволоки 0 8-1 мм, выходящих на обе стороны диска 1, и распаивают на них выводы обеих МА и соединительные кабели со стороны катушки 2. Экраны катушек должны быть соединены между собой и с экранами кабелей.
Участок расположения штырей 4 заливают эпоксидным клеем и рядом с ним приклеивают текстолитовую стойку 5х5х30 мм для закрепления кабелей в датчике. Далее кабели закрепляют на стойке и между собой через каждые 10…15 см клейкой ПВХ лентой.
Для удобства окончательной балансировки по обе стороны от середины прямолинейной части приемной катушки приклеивают держатели винтовых толкателей из гетинак-са размером 10х10х15 мм с резьбовыми отверстиями М4-М5 под текстолитовые винты. Держатели размещают так, чтобы винты могли обеспечить максимальное перемещение в центре на +3…5 мм в направлениях, указанных стрелками.
Для точной настройки индуктивного равновесия в датчике рекомендуется просверлить в винтах несколько отверстий 0 0,8 мм перпендикулярно оси винта для их поворота на малые углы с помощью металлической иглы или шпильки.
Только после нескольких этапов предварительной балансировки можно окончательно приклеивать приемную МА эпоксидным клеем с тканью, как и передающую, оставив свободным участок 8-10 см в зоне размещения винтовых толкателей. Окончательная балансировка датчика проводится совместно с электрической схемой.
Помещать датчик в подходящий корпус целесообразно только после проведения предварительных испытаний в помещении и проверки в полевых условиях.
Налаживание металлоискателя
Настройку прибора начинают с проверки параметров стабилизатора. Для этого его вход подключают к регулируемому источнику питания с диапазоном выходного напряжения не хуже 14,5-18,5 В и током нагрузки более 50 мА. Проверяют наличие выходных напряжений ±6 В относительно общего провода без нагрузки.
Затем подключают цифровой вольтметр между выводами +6 и -6 В. При подключении между ними нагрузочного резистора сопротивлением 390 Ом и мощностью 2 Вт выходное напряжение не должно изменяться более чем на 4-6 мВ. При изменении входного напряжения в пределах 14,5-18,5 В выходное не должно изменяться более чем на 15-20 мВ, в противном случае необходимо заменить DA7.
При отсутствии цифрового прибора с достаточной разрешающей способностью измерения можно проводить осциллографом, подключенным к выходам стабилизатора, в режиме с закрытым входом и чувствительностью 5 мВ/дел.
Изменения выходного напряжения определяют по амплитуде коммутационных импульсов при подключении и отключении нагрузочного резистора, а также при скачкообразном изменении входного напряжения с 14,5 до 18,5 В, при этом конденсатор С49 нужно временно отключить. Ток потребления по шине общего провода не превышает 2 мА и при исправной ИС DA8 обеспечивается с запасом.
Перед включением всей схемы вход регистратора следует отключить от выхода приемопередатчика и соединить с общим проводом, SA1 и SA2 установить в разомкнутое положение, регулятор R42 – в нижнее по схеме (см. рис.2) положение, соответствующее максимальной громкости, к выходу звуковой индикации подключить телефоны.
При включении питания измеряют ток потребления, который не должен превышать 30-35 мА. Вращая потенциометры R16 и R29, проверяют срабатывание DA3 и DA5 по зажиганию VD3 и VD6. DA3 должен срабатывать примерно в нижнем по схеме положении R16, DA5 – в среднем положении R29. Затем замыкают SA1 и SA2 и проверяют срабатывание звуковой индикации. Во время проверки регистратора стрелка прибора Р1 должна находиться вблизи нулевой отметки.
Для проверки параметров генератора передатчика к коллектору VT1,2 (см. рис.1) подключают осциллограф с закрытым входом. Потенциометром R1 устанавливают максимальную амплитуду генерации при минимальных искажениях формы синусоидального сигнала.
Длительность периода колебаний должна быть в пределах 270-400 мкс, при большем отклонении следует подобрать емкости конденсаторов С4-С6, чтобы соотношение С4/(С5+С6) сохранялось равным примерно 1:10. После настройки генератора рекомендуется заменить резистор R1 постоянным соответствующего сопротивления во избежание возникновения контактных шумов.
Для балансировки датчика и настройки приемника датчик необходимо расположить как можно дальше от металлических предметов. В идеальном случае ближайшим “металлом”, находящимся на расстоянии длины соединительных кабелей датчика (1,2-1,5 м), должен быть сам электронный блок и комплект измерительных приборов.
В реальных условиях датчик рекомендуется расположить в центре помещения, используя в качестве подставки набор деревянных или картонных ящиков, не содержащих скрепляющих металлических деталей.
Входную цепь приемника настраивают поочередно балансировкой датчика по минимуму сигнала на контуре L2C10 и в резонанс по максимуму. Для настройки контура используют магазин конденсаторов. В конце настройки напряжение остаточного сигнала (иост) следует контролировать на выходе DА1. Емкость конденсатора С10 желательно подобрать с точностью до 2000 пФ (1%) для получения максимально возможного отношения сигнал/электромагнитная помеха. Конкретное значение С10 можно получить, включая параллельно несколько конденсаторов.
Амплитуда напряжения иост на выходах DA1 и DA2 не должна превышать 1 В (регулируется подбором R7). В точке соединения катодов VD1 и VD2 наблюдают форму выпрямленного напряжения. Амплитуда соседних полуволн не должна отличаться более чем на 10%. Отфильтрованная постоянная составляющая выпрямленного напряжения на выходе активного ФНЧ VT2 должна примерно равняться 0,6 амплитуды сигнала на выходе DA1.
Затем подключают регистратор к выходу приемника. Регуляторами R14, R16, R29 устанавливают пороги срабатывания обоих регистрирующих узлов, соответствующие началу регистрации сигналов электромагнитных полей. Большой уровень помех-s частотой-иитающей сети и ее гармоник может привести к возникновению биений между сигналами передатчика и помехи, в этом случае предварительную проверку МИ следует проводить либо в другое время суток, либо в помещении с меньшим уровнем помех.
При правильной настройке датчика поднесение к нему различных предметов как из цветного, так из черного металлов должно вызывать увеличение напряжения на выходе приемника и срабатывание регистратора.
Если несколько нарушить индуктивное равновесие в датчике с помощью винтов, можно повысить чувствительность прибора к одним металлам по отношению к другим. Например, если сместить подвижной участок приемной МА в сторону уменьшения площади пересечения катушек, произойдет увеличение чувствительности к цветным металлам, причем при плавном приближении к датчику предметов из черного металла сигнал на выходе приемника сначала уменьшится, а затем будет возрастать, и чувствительность к черным металлам понизится.
При разбалансе в другую сторону эффект будет обратным (рис.5,б). Разделение на черные и цветные металлы не являются строго определенным, так, плоские стальные предметы, расположенные параллельно плоскости датчика, регистрируются как цветные, при перпендикулярном расположении -как черные, некоторые предметы из закаленной стали регистрируются также, как цветные.
Во входной цепи приемника на контуре L2C10 осуществляется векторное суммирование сигнала вторичного поля от объекта с остаточным сигналом первичного поля, таким образом, величина суммарного сигнала зависит не только от амплитуды, но и от фазовых соотношений.
Сигналы от цветных металлов имеют положительный сдвиг фаз относительно сигнала первичного поля, сигналы от черных металлов -отрицательный. При балансировке датчика изменяется не только амплитуда остаточного сигнала первичного поля, но и его фаза, поэтому, вводя искусственный разбаланс в ту или иную сторону, можно изменять амплитудно-фазовые соотношения суммарных сигналов и изменять чувствительность к различным группам металлов. К большому сожалению, реализовать такую селективность в реальных грунтах трудно.
Если датчик настроен на повышенную чувствительность к цветным металлам, то приближение его к поверхности грунта вызывает уменьшение суммарного сигнала, если чувствительность повышена к черным металлам – увеличение сигнала.
Таким образом, при неизбежных вертикальных перемещениях датчика при поиске, а также из-за неравномерности рельефа грунта на выходе приемника присутствует значительный сигнал помехи, который невозможно уменьшить даже адаптивной измерительно-регистрирующей системой. В этом случае необходимо либо повышать порог срабатывания, либо увеличивать расстояние между датчиком и грунтом. И то, и другое приводит к значительной потере чувствительности.
Максимальную чувствительность в грунте можно получить в режиме примерно равной чувствительности ко всем металлам, которому соответствует небольшой участок на балансировочной характеристике (рис.5,б, в окрестности точки минимума), где сигнал помехи от грунта минимален и можно проводить поиск при наименьшем расстоянии между датчиком и грунтом. Кроме того, сигнал помехи от динамического разбаланса от неизбежных микродеформаций при движении также минимален.
Предварительно настроить датчик МИ в режим “Все металлы” при одновременном игнорировании (дискриминации) влияния грунта можно с помощью относительно небольшого количества грунта, помещенного в пластмассовую емкость 0>200 мм и высотой 100 мм. Поскольку наибольшее влияние оказывает приповерхностный слой, достаточно, чтобы толщина слоя в емкости была 6-8 см.
Совершая над датчиком вертикальные перемещения емкости с грунтом в интервале высот 5-15 см, винтами балансировки добиваются минимальных колебаний стрелки измерителя Р1.
После окончательной балансировки можно зафиксировать эпоксидным клеем почти всю прямолинейную часть приемной МА, оставив совсем небольшой участок (3-4 см) в зоне винтов толкателей. Это обеспечит подстройку индуктивного равновесия датчика во время полевых испытаний и всего срока эксплуатации прибора.
Полевые испытания и работа с МИ
Перед проведением полевых испытаний блоки МИ закрепляют на штанге. Примерное расположение элементов прибора показано на рис.6.
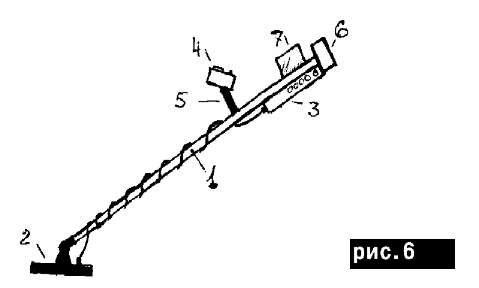
Рис. 6. Примерное расположение элементов прибора. (1 – штанга; 2 – датчик; 3 – электронный блок; 4 – блок индикации; 5 – ручка; 6 – отсек питания; 7 – подлокотник).
Кабель датчика должен быть плотно намотан на штангу 1, его начальный участок, выходящий из датчика 2, не должен быть излишне натянут или сильно провисать, первый виток на штанге нужно закрепить изолентой.
Блок индикации 4 со стрелочным прибором и светоди-одами устанавливают под удобным углом обзора. Регулятор чувствительности R25 устанавливают в среднее положение. Для испытаний выбирают участок грунта размером 2х2 м с ровной поверхностью и отсутствием любых металлических предметов.
После включения питания прибору дают прогреться 2-3 мин, затем проводят оценку сигнала помех от разбаланса датчика. Для этого совершают плавные вертикальные колебания датчика в интервале высот от поверхности грунта 30-80 см и горизонтальные колебания на высоте 50-60 см со средней скоростью около 1 м/с и периодичностью 1,5-2 с. В обоих случаях амплитуда колебаний стрелки Р1 не должна превышать ±10 мкА. В противном случае нужно повышать жесткость датчика. Причиной больших колебаний стрелки прибора может быть и неправильно закрепленный начальный участок кабеля датчика.
Уровни помех от влияния грунта измеряют при плавных вертикальных колебаниях датчика в интервале высот 5-15 см, для их минимизации подстраивают балансировку. Если колебания стрелки Р1 не превышают ±10 мкА, балансировку считают законченной.
Далее совершают колебательные движения датчика в горизонтальной плоскости на высоте 5-6 см и устанавливают минимальные пороги срабатывания обоих регистрирующих узлов, исключающие ложные срабатывания от суммарного напряжения всех видов помех.
Для проверки глубины обнаружения медный диск 0 25х1 мм поочередно размещают на глубинах 15, 18, 20 см, а стальную пластину 100х100х2 мм – соответственно на 30, 35, 40 см. Плоскости контрольных объектов должны быть параллельны поверхности и не менять своего положения в процессе засыпания грунтом, иначе глубина обнаружения снижается.
Глубину обнаружения проверяют в интервале скоростей перемещения датчика: для статического регистратора 0-0,3 м/с, для адаптивного 0,1-0,8 м/с.
Глубину обнаружения более крупных объектов определяют в воздухе, обеспечивая движение датчика параллельно плоскости объекта в интервале скоростей 0,5-1 м/с для адаптивного регистратора и 0-0,4 м/с для статического.
Из полученных значений вычитают минимальную высоту датчика над грунтом, полученную при измерениях для малых объектов. Так как затуханием сигнала в грунте при частоте 3 кГц можно пренебречь, погрешность по этому методу невелика.
В большинстве случаев чувствительность адаптивной измерительно-регистрирующей системы получается выше, чем статической, однако для регистрации крупных объектов на большой глубине требуется повышенная скорость перемещения датчика, при которой значительно возрастают помехи от динамического разбаланса.
Чувствительность статической системы практически не зависит от скорости датчика, но требует относительно частой корректировки порога срабатывания.
Хорошие результаты дает применение обоих узлов регистрации, так, с помощью статического регистратора можно точно определить границы расположения крупных объектов большой протяженности, а с помощью адаптивного измерителя Р1 – глубину залегания локальных объектов малого и среднего размеров.
Для этого находят точку, где сигнал от объекта максимален (рис.7, точка А), а затем, совершая колебательные движения датчика по траекториям, указанным стрелками, находят две точки (В, С), лежащие на одной прямой с точкой А, где показания прибора вдвое меньше.
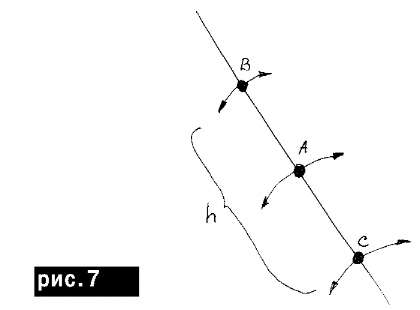
Рис. 7. Как находят точку, где сигнал от объекта максимален.
Глубина залегания объекта h примерно равна расстоянию между точками В и С, причем ее нужно отсчитывать не от поверхности грунта, а от плоскости датчика.
При большой интенсивности сигнала следует увеличить расстояние между датчиком и грунтом и затем вычесть его из полученного значения глубины.
При проведении поиска в местах с большим количеством мелкого металла и других предметов, которые не являются желательными объектами обнаружения, можно работать в режиме максимальной чувствительности при минимальном пороге срабатывания и высоте датчика над поверхностью земли 15-20 см. В этом случае чувствительность к мелким предметам снизится в несколько раз, а потеря чувствительности к крупным составит всего 15-20%.
Автор: П.А. Борщ, г.Киев.
Литература:
- Бухмутский В.Ф., Зуенко Г.И. Индукционные кабелеискате-ли.-М.: Связь,1970. -113с.
- Бахмутский В., Зуенко Г. Металлотрубокабелеискатель. В помощь радиолюбителю. Вып.39, 1972.-С.3-12.
- Флинд Э. Электронные устройства для дома/ Пер. с англ. – М.: Энергоатомиздат, 1984.-80с.
- Андрианов В.И., Соколов А.В. Шпионские штучки-2, или как сберечь свои секреты. -СПб.: Полигон, 1997.-272с.
- Шедрин А. Металлоискатели для поиска кладов и реликвий -М.: Арбат-Информ, 1998.-160с.
- Борщ П.А., Семенов В.Ю. Электронные металлоискатели// Радюаматор.-1998. -№2,3.-С.20,21
как сделать самому, простые схемы, инструкция по сборке и настройке своими руками
Здравствуйте, читатели! Сегодня я хочу поговорить о том, как собрать металлоискатель своими руками. Когда очень хочется купить , а денег на нее нет, приходится откладывать покупку на потом или брать кредит. Кредит обходится дорого. И в голове возникает мысль: «Вот бы найти клад». А какой ? Правильно, металлоискатель. Эта статья расскажет вам, как устроен этот прибор и какие детали нужны для его сборки.
Конструкция и принцип работы
Конструкция металлоискателей состоит из следующих основных элементов:
- Катушка принимает и передает электромагнитный сигнал, сканируя поверхность с искомым металлом.
- Блок управления обрабатывает сигнал, получаемый от катушки, оповещает пользователя графическим или звуковым сигналом, а также позволяет своими руками настраивать режимы работы детектора.
- Нижняя штанга фиксирует катушку и регулирует угол ее наклона.
- Средняя штанга – промежуточное звено между нижней и верхней штангой, позволяет регулировать высоту металлоискателя.
- Верхняя штанга. Здесь размещается блок управления, а также удобная рукоятка с подлокотником, чтобы руки пользователя не устали от длительного удерживания металлоискателя.
Металлоискатель через катушку излучает электромагнитное поле. Когда в этом поле оказывается металл или любой другой токопроводящий материал, поле искажается и ослабляется. Блок управления улавливает это и подает сигнал.
Более электропроводные цветные металлы сильнее искажают излучаемое детектором поле, чем черные.
Поэтому чувствительные электронные схемы позволяют своими руками создавать приборы с дискриминацией металлов, которые могут отличать цветмет от чермета.

Разновидности металлодетекторов
Металлоискатели делятся на:
- индукционные;
- импульсные;
- фазочувствительные;
- параметрические.
Какие виды можно сделать в домашних условиях своими руками
Для самоделок хорошо подходят параметрические и фазочувствительные детекторы. Они просты в изготовлении, а детали для них стоят сущие копейки. Для сборки своими руками достаточно обладать базовыми знаниями по радиотехнике.
Металлоискатели с накоплением фазы намного чувствительнее параметрических. они имеют хорошую дискриминацию и позволяют находить даже мелкие драгоценности, что делает их любимым инструментом пляжных золотоискателей. На сухом песке удается найти серьги и кольца на глубине до 38 см.
Основные параметры
Метод поиска
Индукционные металлодетекторы (МД) состоят из приемопередающей катушки индуктивности.
Излучаемый сигнал при попадании на металлический предмет отражается обратно и регистрируется приемником. Эти устройства достаточно просты в изготовлении своими руками, но их чувствительность сильно зависит от типа грунта и качества катушки.
Импульсные МД возбуждают в поисковой зоне вихревые токи и измеряют вторичное затухающее электромагнитное поле. Чувствительность этих приборов выше и не зависит от типа грунта. Однако они потребляют много электроэнергии, что не позволяет работать в автономном режиме продолжительное время.
Фазочувствительные МД могут быть:
- Импульсными. Приемник и передатчик здесь – один и тот же элемент. Он фиксирует сдвиг фаз отраженного от металла сигнала. Нарастание сдвига фаз вызывает в наушниках щелчки: чем ближе МД к металлу, тем чаще они становятся, в итоге сливаясь в единый звук. На этом методе основана работа популярного металлоискателя «Пират».
- Двухконтурными. Состоят из 2 симметричных генераторов и 2 детекторов. Металлический предмет нарушает синхронизацию генераторов, и возникают те же щелчки, сливающиеся в непрерывный тон.
Двухконтурные проще в изготовлении своими руками, чем импульсные.
- Параметрические МД не имеют ни приемной, ни передающей катушки, что делает их простыми, дешевыми и популярными для сборки своими руками. LC-генератор создает электромагнитное поле звуковой частоты. Любой металл рядом с металлоикателем изменяет параметры катушечного детектора, что влияет на частоту и амплитуду генерируемых сигналов. Схему таких приборов легко найти. Однако чувствительность их низкая и не позволяет вести сложные поиски. Параметрические МД делятся на:
- Частотные МД. Излучают многочастотные сигналы. При приближении к металлам прибор фиксирует изменение частоты.
- Металлоискатели, регистрирующие изменение добротности контура. Когда расстояние между прибором и металлом уменьшается, прибор фиксирует это.
Глубина обнаружения
Глубина обнаружения зависит от диаметра катушки, электронной схемы и частоты работы. Чем больше диаметр мотка провода, мощнее излучаемое электромагнитное поле и ниже его частота, тем глубже зона обнаружения металлоискателя, сделанного своими руками.
Однако с увеличением глубины поиска ухудшается чувствительность металлоискателя к мелким предметам, селективные возможности также снижаются. Возрастает энергопотребление и вес устройства, что усложняет длительное удержание металлоискателя в руках.
Частота работы
По частоте работы МД делятся на:
- Высокочастотные. Работают на частотах нескольких сотен кГц. Применяются в приборах, рассчитанных на поиски золота, так как имеют отличную дискриминацию. Но резко теряют чувствительность на мокрых и магнитных грунтах, а также на глубине больше 40 см.
- Среднечастотные. Частота работы до нескольких десятков кГц. Требования к качеству катушки ниже, хорошая чувствительность. Глубина обнаружения до 1,5 метров при условии, что грунт сухой и маломинерализованный.
- Низкочастотные. Работают на частоте от сотен Гц до нескольких кГц. Это глубинные металлоискатели, обнаруживающие предметы до 5 метров под землей. Они просты в изготовлении своими руками. Из недостатков: низкая чувствительность и высокое энергопотребление. Подходят в качестве магнитодетекторов, а также для поиска крупных предметов из черного металла (арматура, проводка).
- Сверхнизкочастотные. Не подходят для любительского поиска, так как имеют высокое энергопотребление и большие габариты, а для обработки сигнала требуются специальные программы. Частота работы до нескольких сотен Гц. Эти металлоискатели невозможно удерживать на руках, поэтому они устанавливаются на автомобиле.
Пошаговая инструкция по сборке простого самодельного металлоискателя своими руками
Необходимые инструменты и материалы
Для сборки металлоискателя своими руками понадобятся:
- Инструменты: кусачки, ножик, пила мелкая, отвертка, паяльник.
- Материалы: провод, припой, флюс, клей, изолента, радиодетали, деревянная или пластиковая палка.
В качестве штанги, а также элементов ее крепления нужно использовать диэлектрики (полимеры, дерево, клей), чтобы они не вносили помех в работу металлоискателя.
Подготовка деталей
Нужно подготовить плату, на которой будет монтироваться электрическая схема. В качестве платы может использоваться даже картон. На ней от руки размечают расположение будущих деталей и проделывают отверстия.
Радиодетали покупают в магазине или выпаивают из старой аппаратуры. Однако нужно следить, чтобы детали были одинаковыми. Это позволит легче согласовать работу двух детекторов.
Схемы металлодетектора для изготовления
Чувствительного металлоискателя на базе схемы двухконтурного осциллятора
Этапы изготовления:
- Располагают на плате транзисторы, резисторы и конденсаторы и припаивают согласно приведенной ниже схеме.
- Припаивают два провода от батарейного отсека, а также два пьезоэлектрических динамика.
- Наматывают провод на круглый каркас диаметром около 22 см. После 10 витков делают отвод провода длиной 20 см. Провод в месте отвода не разрывают, а складывают руками пополам. Делают еще 20 витков. В результате должно получиться три вывода длиной 20 см: начало провода, конец и отвод после 10-го витка.
- Снимают катушку с каркаса, придерживая витки руками, и плотно фиксируют изолентой.
- Наматывают вторую катушечку, которая должна зеркально повторять первую. Снимают ее с каркаса и фиксируют изолентой.
- Припаивают согласно схеме выводы катушечных детекторов.
- Собирают подставку. Катушки располагают друг от друга на расстоянии примерно 15 см, а между ними прикрепляют плату.
- Настраивают детекторы перед закреплением. Включают металлоискатель и, перемещая руками катушки, добиваются максимальной тишины. Подносят металл к одной из них. Если звук заметно изменяется, значит, металлоискатель работоспособен.
- Фиксируют элементы клеем и замазывают масляным лаком.
- Прикрепляют к подставке рукоятку.

На трансформаторе с Ш-образными пластинами
Это простой параметрический металлоискатель с индуктивной обратной связью. Позволяет обнаруживать скрытую проводку, арматуру в стенах и перекрытиях, а также крупные металлы в почве. Трансформатор используется маломощный от любого радиоприемника. Чтобы своими руками превратить трансформатор в детектор, нужно разомкнуть его магнитопровод: снять каркас, прямые перемычки и обмотки.
Существуют две схемы переделки трансформатора. В первой используются старые обмотки, во второй они наматываются заново.
В первом случае Ш-образные пластины нужно сложить вместе и на них надеть обмотки. Обмотка на схеме II – сетевая, обмотка I – понижающая на 12 В. Конденсатором С1 настраивается тон звука. Вместо транзистора МП40 можно использовать КТ361.
Во втором случае на Ш-образные пластины наматываются обмотки на 1000 витков (на схеме I) и 200 витков (на схеме II). Для обмотки I используется провод ПЭЛ-0,1. Через 500 витков делается отвод. Обмотка II наматывается проводом ПЭЛ-0,2.
Трансформатор герметизируется и помещается на нижней штанге металлоискателя. При приближении к металлу в наушниках изменится тональность сигнала.
На транзисторах
Также несложная схема, состоящая из транзисторов К315Б или К3102, конденсаторов, резисторов, наушника и элемента питания.
Первый транзистор создает задающий генератор, второй – поисковый генератор. Если к катушке приблизить металл, в наушниках появляется звук. Подробная схема приведена ниже.

На микросхеме К561ЛЕ5
Схема состоит из микросхемы, наушников, резисторов и конденсаторов. Катушка L1 подключается к задающему генератору, а L2 – к поисковому генератору микросхемы. Металлический предмет влияет на частоту поискового генератора, меняя звук в наушниках. Настраивается МД конденсатором С6. Он устраняет лишние шумы. Напряжение питания прибора 9 В.

Как собрать своими руками без использования микросхем
Это самый простой в сборке вариант. Так сказать, для чайников. Не нужно даже ничего паять. Металлоискатель строится из калькулятора, радиоприемника и картонки или коробки от CD диска. Приемник и калькулятор нужно брать самые простые, без защиты от электромагнитных помех.
Принцип действия основан на том, что калькулятор создает радиопомехи в АМ диапазоне, а приемник их улавливает. Изготовление металлоискателя своими руками состоит из следующих стадий:
- Радио поставить на самый верхний АМ диапазон, но при этом свободный от станций. Должны слышаться только помехи.
- Приемник двухсторонним скотчем приклеить тыльной стороной к одной створке коробки от CD диска. Калькулятор приклеить к другой створке.
- Включить калькулятор. При полностью открытой створке приемник должен усилить свое звучание.
- Плавно сложить коробку. Когда угол между приемником и калькулятором станет примерно 90°, радио утихнет.
- Зафиксировать коробку в этом положении.
При попадании металла в зону действия МД вектор поля повернется, и приемник снова усилит свое звучание. В зависимости от конструкции приемника может оказаться, что при угле 90° звучание, наоборот, усиливается. В этом случае постепенно увеличивают угол между створками коробки, добиваясь ослабления тона.
Сборка печатной платы
Есть несколько вариантов разводки плат своими руками. На рисунках ниже приведены схемы разведения плат для металлоискателей на двухконтурном осцилляторе, на трансформаторе, транзисторах и на микросхеме К561ЛЕ5.

Собранную своими руками электронику нужно разместить в пластиковом корпусе для исключения помех.
Как сделать катушку
Используется медный эмалированный провод диаметром 0,4–0,6 мм и оправа нужного размера. Диаметр оправы зависит от целей применения металлоискателя:
- до 9 см – подходит для поиска арматуры и профилей;
- 14-18 см – для поиска мелких драгоценностей;
- 22-50 см – для поиска крупных и глубоко залегающих предметов.
Также для правильной работоспособности металлоискателя нужно следить за индуктивностью катушки. Индуктивность можно измерить специальным прибором или рассчитать в интернете на калькуляторе.
Оправу для катушки можно приобрести в магазине или сделать самому. Для этого подойдут фанера или прочный пластик. Лучше всего использовать пластик (поликарбонат, компьютерный диск, ковш), так как он меньше всего влияет на электромагнитное поле и не поглощает влагу.
Расположение деталей на плате для микросхемы в корпусе DIP
Если используется микросхема в DIP корпусе, то детали размещают как на рисунке ниже.

Расположение деталей на плате для микросхемы в корпусе SM
Ниже приведена схема расположения деталей при использовании микросхемы в SM корпусе.

Краткая инструкция по настройке прибора
Общее правило при регулировке металлоискателя своими руками – добиться наименьшего звука в «холостом» режиме, чтобы писк или щелчки появлялись только при обнаружении металлического предмета. Этого можно достичь, изменяя индуктивности катушек, емкость конденсатора или сопротивление резистора.
Модернизация
Чтобы металлоискатель лучше находил мелкие драгоценности, нужно увеличить его рабочую частоту.
Чувствительность прибора увеличивается и при добавлении в схему дополнительной RC-цепи.
Установка переменных резисторов позволяет настраивать прибор своими руками, не трогая катушки.
Применение динамиков с конденсаторами делает выдаваемый звук громче. Полезно также создание надежного крепления катушек и блока управления. Защита от ударов и трясок уменьшит помехи, а настройки будут реже сбиваться.
Заключение
Теперь вы знаете, как изготовить металлоискатель своими руками. Буду рад, если эта статья поможет вам найти клад. Подписывайтесь на новые статьи и делитесь полезной информацией в соцсетях.
Металлодетекторы-металлоискатели. Виды и работа. Применение
Металлодетекторы-металлоискатели ныне становятся незаменимым оборудованием при реконструкции старинных домов, именно с их помощью работники разыскивают проложенные трубы, электрокабеля и т.п.
Поиск металлических предметов под землёй, в воде, стенах здания и т.п. является не только методом заработка или хобби для некоторых людей. Археологи, дайверы, военные давно пользуются специальными приборами для поиска различных предметов в нейтральной среде.
Устройство металлодетекторов
Металлодетектор (МД) является специальным электроприбором, обнаруживающим металлические предметы за счёт их проводимости в любой среде (воде, земле, организме живого существа, стенах зданий). Обнаруживая металл, приборы подают особый звуковой либо светозвуковой сигнал, некоторые модели способны даже чётко определить найденную вещь.
Существует уйма металлодетекторов, все они различаются своим конструктивным исполнением, эти отличия обусловлены разным назначением приборов. Конструкция устройств для поиска металлов довольно сложная, но любой прибор состоит из нескольких основных частей, присутствующих в основном в каждой модели.
Типовая конструкция металлоискателя:
- Катушка. Этот элемент металлодетектора представляет короб, в котором расположен приемник сигналов и передатчик. Обычно катушка круглой либо эллиптической формы, а в её изготовлении используется пластик. К ней присоединяется кабель, который проходит к блоку управления. Соединение кабеля и катушки обязательно должно быть выполнено герметично. По этому кабелю передаются сигналы от приемника к блоку. А сам приемник получает сигнал от передатчика, как только тот обнаружит вблизи металл. Сама катушка закреплена в нижней штанге.
- Нижняя штанга. Эта металлическая часть устройства выполняется из металла, предназначена для фиксирования катушки и регулировки угла её наклона, благодаря чему происходит более точное исследование. В некоторых моделях штанга регулирует высоту металлоискателя и телескопическое соединение со средней штангой.
- Средняя штанга. Обычно этот элемент представляет промежуточную часть между нижней и верхней штангой. На этой штанге крепятся специальные приспособления для изменения высоты устройства. Некоторые приборы состоят только из двух штанг.
- Верхняя штанга. Форма этой штанги обычно S-образная. Эта форма признана, как более удобная для применения приборов МД. Верхняя штанга оборудована подлокотником, блоком управления и рукояткой.
- Подлокотник. Чаще всего этот элемент изготавливают из полимерного материала. Предназначен он для того, чтобы прибор было удобнее держать, делая на подлокотник упор локтем.
- Рукоятка. Этот элемент изготавливают из пористого материала и устанавливают на верхней штанге МД. Рукоятка обеспечивает надёжность держания и удобство эксплуатации.
- Блок управления. Благодаря блоку управления происходит обработка информации, полученной от катушки. После преобразования данных, пользователь получает в ясном виде сигналы от передатчика. Также с помощью блока происходит настройка режимов прибора. Кабель от поисковой катушки подключается к блоку управления путём быстросъёмного разъёма.
Блок управления бывает фиксированным и съёмным. Профессиональные модели оснащены батарейным отсеком, располагающимся от блока управления отдельно.
Много новых моделей металлодетекторов имеют очень компактные габариты и исполнение, а также высокую надёжность.
Принцип работы металлодетекторов
Все МД-МИ определяют присутствие металлических предметов и информируют об этом. Металл, где бы он ни находился, не способен сам по себе что-то излучать, тем самым выдавая своё присутствие. Но облучая предмет радиоволнами, его можно обнаружить, улавливая вторичный сигнал. На этом принципе работают все металлоискатели.
При включении МД, переменный электроток протекает в поисковой катушке и создаёт вокруг неё электромагнитное поле, которое способно проходить в окружающую среду. При сталкивании с металлом на поверхности поля появляются вихревые токи, которые образовывают своё электромагнитное поле, ослабляющее поле катушки. Электронная схема устройства улавливает ослабление поля и информирует об этом, благодаря катушке.
Вихревые токи появляются на поверхности разных металлов либо минералов, имеющих электропроводность. Более электропроводны цветные металлы, из-за этого создающиеся токи затухают дольше на них. Приборы ощущают, насколько затухают вихревые токи, благодаря чему определяют цветной или чёрный металл под катушкой.
Лучше улавливать слабые вторичные сигналы и точнее их обрабатывать, способны электронные схемы, отличающиеся сложностью. Приборы с такими схемами стоят дороже, потому что их изготовление довольно трудоёмкое. Но такие металлодетекторы находят металлические объекты на большой глубине. Препятствием для обнаружения металла в грунте, может быть наличие электропроводных минералов в почве (соли калия, натрия, магнетит и пр.). Они способны маскировать металл, снижая глубину его поиска. Снизить влияние подобных минералов помогают различные фильтры и разные другие приспособления, которым наделяют производители некоторые модели МД. К примеру, некоторые устройства оснащены автоматической отстройкой от почвы, в других эту отстройку можно выполнять вручную.
Разновидности металлодетекторов по принципу работы
Все металлодетекторы-металлоискатели можно классифицировать по принципу работы, а также по назначению (выполняемым задачам).
МД по специфике действия:
- МД типа «прием-передача». Приборов этого типа довольно много можно встретить на рынке. Простая специфика действия устройств, базируется на приеме и передаче электромагнитного излучения. Главными элементами прибора служат две катушки. Приёмная катушка индуктивности принимает сигналы, её также принято называть поисковой. Передающая – излучает электромагнитные волны, попадающие в поисковую катушку. Волны легко проходят через нейтральную среду, и отражаются от металла, когда на их пути стоит металлический объект. Из-за этого МД получает отражённую волну, после чего срабатывает сигнал, информирующий о находке.
Достоинствами этих приборов являются следующие моменты:
— простая конструкция;
— широкие возможности для поиска и определения металла.
Недостатки:
— чувствительность к минерализации почвы;
— сложность производства датчика.
Соли и прочие минералы, находящиеся в грунте, представляют большие преграды в нахождении и определении металла, поэтому устройства этого типа следует предварительно настраивать, указывая тип почвы, в которой будет происходить поиск.
- Индукционные металлодетекторы. Этот тип металлоискателей спецификой поиска объектов практически не отличается от МД вида «прием-передача», поэтому индукционные приборы приписывают к разновидностям первых. Они отличаются от них конструкцией, так как имеют только одну катушку, способную посылать и принимать сигналы. Приборы имеют простой конструкции датчик, но слабый отражённый сигнал в сравнении с мощным излучаемым.
На индукционные металлоискатели также очень влияет минерализация грунта. - Импульсные металлодетекторы. Основой приборов является катушка, формирующая в месте размещения металла вихревые токи, которые ловит устройство. Возникающий сигнал передаётся в катушку датчика в виде импульсов. Длительность сигнала может быть разной, как и его форма. Эти отличия обусловлены разными размерами и проводящими свойствами предмета, с которым столкнулся прибор.
Плюсы:
— простота конструкции датчика;
— нечувствительность к минерализации почвы.
Но импульсные металлодетекторы имеют и своеобразные минусы, они много потребляют энергии и низкие возможности дискриминации, что влияет негативно на работу с одним типом металла.
- Генераторные металлоискатели:
— МД измерители частоты;
— МД определяющие изменение добротности колебательного контура.
Основой этих устройств является LC-генератор. Приборами этого типа ищут чаще металл только определённого вида.
В одних генераторных приборах меняется частота, если вблизи находиться металлический объект. Эти устройства называют измерителями частоты, и их работа может основываться на разных методах:
— Подачи сигнала на систему фазовой автоподстройки частоты (ФАПЧ) с LC-генератор и измерении напряжения в цепи обратной связи.
— Фиксировании частоты биений и совмещении генераторной частоты с эталонной. Измерители частоты отличаются простой схемотехникой и конструкцией датчика, но у них низкая чувствительность и возможности дискриминации найденных предметов
Другой тип генераторных приборов основан на изменении добротности контура, сталкиваясь с металлом на пути. Колебательный контур является частью LC-генератор, когда катушка приближается к зоне размещения металлических предметов, добротность и амплитуда колебаний снижается.
Приборы, находящие металл таким способом, имеют небольшую потребляемую мощность и простую конструкцию, эти особенности можно отнести к их достоинствам. Но такие МД довольно неустойчивые к варьированию температур.
Профессиональные приборы имеют несколько способов одновременно для поиска и определения типа металлов.
Металлодетекторы-металлоискатели виды и применение
Рынок постоянно пополняется новыми моделями МД, которые имеют улучшенные показатели качества, точности и практичности эксплуатации. Устройства, обнаруживающие металл в разных средах, применяются во многих отраслях, их используют любители кладоискательства, археологи в экспедициях и даже строители. Во всевозможных сферах применяют разного рода металлодетекторы-металлоискатели, поэтому их и разделяют по предназначению.
Виды МД по предназначению:
- Грунтовые. Металлоискатель, с помощью которого ищут металлолом, ювелирные изделия, монеты и прочий клад.
- Глубинные. С использованием этой категории приборов разыскиваются на большой глубине крупные объекты.
- Подводные. Предназначены для дайверов, этими устройствами ищут артефакты, клады на больших глубинах в воде.
- Золотоискательские. Этими устройствами ищут золото в разных средах.
- Досмотровые металлодетекторы (охранные). Этими МД пользуются службы безопасности для обнаружения металлических предметов на теле человека.
- К охранным МД относятся рамочные детекторы, которые устанавливаются в виде арки в аэропортах, метро и прочих местах с большим потоком людей.
- Промышленные. Этими детекторами оборудованы конвейеры и другое оборудование на производствах с целью выявления металла в других материалах.
- Военные. В основном эта группа МД применяется для поиска мин, поэтому их называют миноискателями.
- Магнитометр. Этот вид детекторов используют для поиска железа и прочих ферромагнитных металлов.
В основном нынешние металлодетекторы и металлоискатели считаются высокоточными приборами. Они имеют эргономичный дизайн, простые в эксплуатации и весят совсем немного.
Похожие темы:
схемы, как сделать самодельный металлодетектор «Пират» для поиска ценных материалов и другие полезные рекомендации 
Facebook
Twitter
 Металлоискатель
Металлоискатель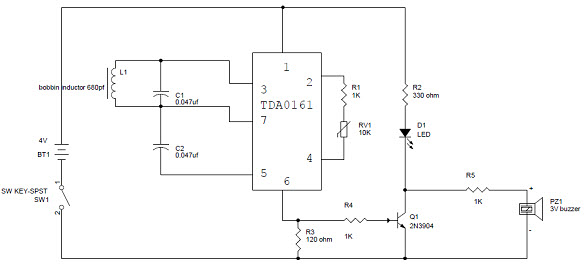 Схема металлоискателя
Схема металлоискателя
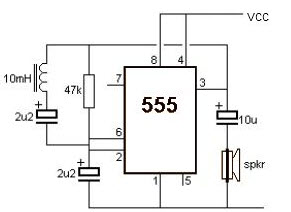 Схема металлоискателя с использованием 555 IC
Схема металлоискателя с использованием 555 IC Роботизированный автомобиль с металлоискателем, управляемый Android Project Project Kit
Роботизированный автомобиль с металлоискателем, управляемый Android Project Project Kit Комплект проекта роботизированного транспортного средства для металлоискателя
Комплект проекта роботизированного транспортного средства для металлоискателя
Мечта найти клад всё чаще заменяется в наше время более реалистичной программой поиска драгоценных металлов в природной или искусственной среде.
В современных условиях очень важно найти и извлечь ценные материалы, оказавшиеся среди отходов, мусора или в другой неконтролируемой среде.
Аппаратура – важный компонент технологии такого поиска.
Поиск и извлечение золота и ценных металлов из отходов, мусора, в природной обстановке – часть стратегии рециклинга, технологии эффективной переработки использованных материалов, в том числе переработки драгоценных металлов.
Занятие их поиском в земле или в массе промышленных и других отходов не только требует применения аппаратуры, но и стимулирует её совершенствование. Создаются приборы разного уровня и специализации. Есть интерес к такой аппаратуре у любителей и энтузиастов поиска ценных металлов.
Устройство металлодетектора
 Металлоискатель – самый главный инструмент ручного поиска металлов в хаотичной природной или искусственной среде.
Металлоискатель – самый главный инструмент ручного поиска металлов в хаотичной природной или искусственной среде.
С помощью такого прибора можно искать не только чёрный металл, но и золото, серебро, другие драгоценные металлы.
Принцип устройства любого металлоискателя основан на электромагнитных эффектах.
Вот как работает типичная технология поиска металла:
- Прибор создаёт электромагнитное поле.
- Металлический объект, скрытно расположенный в инородной среде, оказывает воздействие на такое поле, когда попадает в сферу его влияния.
- Прибор улавливает воздействие объекта на электромагнитное поле и сигнализирует об этом.
Большее количество моделей металлоискателей работают именно на таком принципе.
Технические различия такой аппаратуры позволяют получить более полную информацию о факте обнаружения металлического объекта, например:
- оценить массу находки;
- получить данные о форме, размерах и конфигурации объекта;
- уточнить место расположения, в том числе – по глубине.
В Сети есть множество информации о металлоискателях разной сложности и конструкции. Там же можно освежить в памяти теорию электромагнитного поля, изучаемую в школе.
Самые простые, примитивные металлоискатели (обычно это самодельные конструкции для поиска золота, серебра и других металлов энтузиастов-любителей) собирают из готовых устройств и изделий, работающих с использованием электромагнитных эффектов.
Многие знакомы с примитивной, но вполне работоспособной схемой металлоискателя, в котором электромагнитное поле создаёт импульсный элемент обычного калькулятора.
 Реакцию создаваемого поля на обнаруженные металлические объекты улавливает самый простой бытовой радиоприёмник. Сигнал о такой находке — звуковой, достаточно отчётливый и понятный.
Реакцию создаваемого поля на обнаруженные металлические объекты улавливает самый простой бытовой радиоприёмник. Сигнал о такой находке — звуковой, достаточно отчётливый и понятный.
Более сложные любительские и профессиональные устройства поиска металлов сохраняют логическую основу технологии в виде трёх компонентов:
- генератора электромагнитного поля;
- датчика изменений этого поля;
- аппаратуры оценки обнаруженных аномалий, сигнализирующей об этом.
Устройства разного уровня сложности и функционального потенциала могут быть условно разделены на группы. Классификация на основе профессионализма и специализации пользователей – одна из общепризнанных:
- любительская аппаратура, собранная собственноручно и используемая в качестве инструмента хобби или новичками в деле поиска металлов;
- полупрофессиональная аппаратура, необходимая увлечённым любителям и фанатикам;
- профессиональные металлоискатели для постоянно работающих в этой сфере;
- специальные аппараты для мастеров поиска металла в сложных условиях – на глубине, под водой, с выделением драгоценных металлов.
Распространение аппаратуры поиска металлов таково, что многие устройства этого типа можно приобрести в магазинах садового и дачного инвентаря.
Аппарат для поиска и обнаружения металла нужен не только в деле рециклинга, в поиске артефактов и кладов. Многочисленные системы безопасности, всем известные рамки – одна из версий технологии поиска металла. Настройки этих рамок ориентированы на поиск оружия и аналогичных опасных предметов.
Катушка
Очень важный узел аппаратуры поиска металлов – катушка или рамка. Это чаще всего обмотка специальной конфигурации, задача которой сформировать электромагнитное поле и уловить его реакцию на обнаружение инородного для среды поиска металлического тела.
В большинстве конструкций катушку располагают на длинной штанге – ручке для её перемещения вблизи зоны поиска.
Для любительского изготовления катушек продаются каркасы наиболее востребованных типов. Проще всего сделать такое приобретение в интернет-магазине.
 Многие любители изготавливают каркасы катушек самостоятельно. Это делается из соображений экономии средств или в надежде получить более качественный инструмент авторской конструкции.
Многие любители изготавливают каркасы катушек самостоятельно. Это делается из соображений экономии средств или в надежде получить более качественный инструмент авторской конструкции.
Для этого используются подручные средства – пластмассовые изделия, фанера и даже заполнение монтажной строительной пеной собранной обмотки.
Оператор поиска или кладоискатель стремится найти наиболее эффективную технику работы с металлоискателем, выбирая нужные режимы работы электроники и правильные приёмы манипуляций катушкой.
Электронная схема
Логический элемент металлоискателя – электронная схема. Она выполняет много функций:
- Первая задача этого компонента заключается в создании электромагнитного сигнала нужного формата, который при помощи катушки преобразуется в поле.
- Вторая задача электронной схемы – анализ улавливаемых рамкой изменений поля, их обработка.
- Третья задача – подача информирующего сигнала оператору – звуком, светом, показаниями индикаторов и приборов.
Лучше всего, если желающий собрать электронную схему самостоятельно владеет познаниями в радиолюбительском деле или в электронной технике. Такой мастер может не просто собрать нужную схему, но и изменить, улучшить конструкцию.
Многие электронные устройства достаточно просты, их сборку может выполнить даже новичок. Полученное устройство будет работоспособным без настройки, если сборщик в точности выполнил рекомендации разработчика такой схемы.
Как сделать «Пират» самостоятельно?
 Одна из наиболее популярных моделей металлоискателей, рассчитанных на собственноручное любительское изготовление – «Пират».
Одна из наиболее популярных моделей металлоискателей, рассчитанных на собственноручное любительское изготовление – «Пират».
Это название, содержащее сокращённые данные его устройства и сайта разработчиков, остроумно отражает романтику поиска драгоценных металлов.
Вот главные достоинства этой модели:
- простота устройства и сборки;
- невысокая стоимость деталей и материалов;
- достаточные рабочие параметры;
- признанное удобство для новичков.
Электронная схема этой модели не требует программирования. В «Пирате» используются доступные каждому детали, правильно собранная схема полностью работоспособна.
Конструкция и принцип работы
Конструктивная схема и компоновка металлоискателя «Пират» традиционна для аппаратуры такого рода. Она представляет собой штангу, на нижнем конце которой установлена катушка, а в верхней части – электронный блок с элементом питания.
Расположение электронного блока должно оставлять место для удобного удержания штанги рукой.
Некоторые мастера предпочитают, чтобы звуковой сигнал аппарата подавался не динамиком, а наушниками. В таком случае от электронного блока отходит кабель наушников.
Технология работы аппарата – импульсная. Это позволяет обеспечить очень хорошие для такого класса аппаратуры показатели чувствительности. Ниже представлена схема электронного блока на микросхемах.
Аналогичную схему можно собрать, использовав транзисторы вместо микросхем. Такая версия может потребовать дополнительных настроек, доступных только опытным радиомастерам. Вот почему транзисторная схема используется реже.
Материалы, детали и заготовки
Помимо подробно и точно указанных на принципиальной схеме электронного блока деталей, для сборки металлодетектора на золото и другие металлы потребуется приготовить некоторые материалы и заготовки:
- готовая плата для сборки электронной схемы или фольгированный материал для её самостоятельного изготовления;
- источник питания в виде любой комбинации аккумуляторов или батареек суммарным напряжением 12V;
- эмаль-провод сечением 0,5 – 0,6 мм для изготовления катушки;
- многожильный медный провод для соединений сечением не менее 0,75 кв.мм;
- корпус для электронного блока — пластмассовая ёмкость подходящего размера;
- достаточно прочная пластмассовая труба для штанги;
- каркас для намотки катушки;
- расходные материалы – припой, термоусадочный кембрик, изолента, винты и саморезы крепежа, клеи и герметики.
Печатную плату для сборки электронной схемы лучше всего делать по образцу разработок, представленных в интернете.
Ниже представлен один из таких образцов, пригодный для сборки электроники на микросхемах.

Изготовлением платы занимаются любители самодельной электроники, да и то не все. Большинство желающих создать металлоискатель самостоятельно предпочитают купить такую деталь.
Для сборки катушки потребуется оправа или каркас, не содержащий металлических элементов. Самодеятельный мастер может изготовить такой каркас из фанеры, пластмассы или подобрать похожий по параметрам из готовых пластмассовых изделий, например – посуды. Оправа может быть приобретена в готовом виде или сделана самостоятельно
Рекомендуемые параметры катушки – 25 витков эмаль-проводом диаметром 0,5мм по оправке диаметром 190-200мм. Увеличение диаметра на 30% приведёт к повышению чувствительности аппарата, при условии, что количество витков будет уменьшено до 20-21.
Пластмассовый каркас для катушки – одна из самых распространённых в продаже деталей металлоискателей.
Технология манипуляций катушкой такова, что этот весьма непрочный узел может пострадать от ударов о неровности земли, камни, острые предметы. Во избежание этого катушку на каркасе прикрывают снизу пластмассовой тарелкой. Такая тарелка не только защищает катушку, но и обеспечивает режим скольжения по высокой траве. Поиск становится более интенсивным.
Порядок сборки и дизайн
 Для успешной сборки металлоискателя лучше всего придерживаться такого порядка действий:
Для успешной сборки металлоискателя лучше всего придерживаться такого порядка действий:
- изготовление печатной платы и сборка электронной схемы;
- выбор подходящей по размеру пластмассовой ёмкости для неё и завершение сборки электронного блока;
- изготовление катушки;
- изготовление штанги удобной формы и крепление на неё электронного блока и катушки, выполнение соединений электронной схемы.
Хотя принципиального характера порядок сборки не имеет. Для тех, кто изготавливает аппарат для постоянной длительной работы в области поиска цветных металлов и последующего рециклинга (переработки ради повторного применения), важным фактором является удобство пользования.
В этом случае проработка формы штанги и компоновка основных элементов аппарата становится ключевым фактором. Таким образом, в создании аппарата появляется серьёзная дизайнерская фаза.
Лучше всего выполнять этот этап работы с помощью моделирования в натуральную величину. Такое моделирование можно произвести с использованием деревянных деталей подходящей формы, например:
- черенка для лопаты;
- фанерных кусков нужной формы;
- обрезков из древесины;
- временного крепежа из кусков проволоки, гвоздей и верёвок.
Убедившись, что скомпонованная модель аппарата будет достаточно функциональна и удобна, можно приступать к решающей сборке. Готовый аппарат, как правило, не требует настройки, он полностью готов к работе. Начать поиск металла можно, выбирая нужный уровень чувствительности и правильную тактику манипуляций катушкой.
 Сборщики, которым нужно как можно быстрее собрать свой аппарат, могут воспользоваться готовыми наборами деталей.
Сборщики, которым нужно как можно быстрее собрать свой аппарат, могут воспользоваться готовыми наборами деталей.
Покупка такого комплекта позволяет значительно упростить изготовление «Пирата». Одно из предложений есть здесь.
Пользователи металлоискателя «Пират», обладающие навыками в радиолюбительском деле, модифицируют конструкцию этого аппарата. Вот только несколько направлений таких усовершенствований:
- Изготовление катушки с необычными параметрами – по размерам, из особенных материалов, например – кабеля типа «витая пара».
- Устройство дополнительных функциональных систем, например – индикации степени разряда аккумулятора.
- Изготовление моделей для подводной работы.
- Дополнения электронной схемы, позволяющие различать металлы (создание функции дискриминации).
Простой, недорогой и надёжный металлоискатель «Пират» исправно работает в самых разных условиях.
Самодельный металлодетектор – плюсы и минусы
Дешевизна, базовое преимущество самостоятельного изготовления любых изделий, актуальна для металлоискателя. Вот какие ещё есть достоинства у самодельного аппарата:
- наибольшее соответствие технологии поиска для новичков;
- возможности создания аппарата полностью индивидуальной формы, дизайна и конфигурации;
- удовольствие от самостоятельного изготовления эффективного, работоспособного прибора.
Как и любое устройство, изготовленное любительским образом, металлоискатель не лишён некоторых недостатков.
 Вот какие особенности модели «Пират» отмечают пользователи:
Вот какие особенности модели «Пират» отмечают пользователи:
- энергичное потребление заряда аккумуляторов питания;
- отсутствие дискриминации, то есть точной чувствительности на чёрные, цветные и драгоценные металлы;
- ограниченная в сопоставлении с дорогостоящими моделями чувствительность.
Несмотря на недостатки, модель «Пират» очень популярна. Это объясняется простотой самодельного изготовления и высокой результативностью недорогого аппарата.
Занятые в области рециклинга специалисты считают, что возможности дискриминации металлоискателя не имеют большого значения. Все найденные металлы настолько ценны, что их переработка всегда оправдана. Ориентация на поиск золота требует не только аппаратуры, но и немалого опыта, сопутствующих знаний и, конечно же, удачи.
Видео по теме
В видео представлено подробное руководство по изготовлению и сбору металлоискателя «Пират» своими руками:
Заключение
Когда металлоискатель будет готов, можно начинать работу. Нужно отдать себе отчёт в том, что ни один самый совершенный аппарат не позволит находить только золотые скрытые объекты.
Металлоискатель поможет найти ценный металл, и весьма вероятно, что это будет золото. Лучше всего, если у будущего искателя металлов и золота будет реальное представление о технике поиска.
Многие особенности эксплуатации готовой аппаратуры очень важны для тех, кто разрабатывает и собирает собственные модели. Нужно заранее иметь представление о технологии работы с такой аппаратурой – именно это является основой её качественного дизайна.
Результативность поиска золота повышается с опытом. Вот наиболее важные элементы такого опыта:
- правильный выбор конструкции металлоискателя и его качественное изготовление своими руками;
- способность правильного выбора площадки поиска;
- умение использовать потенциал металлоискателя полностью;
- выбор правильной технологии поиска в разных условиях;
- модернизация металлоискателя.
Правильно собранная и отлаженная аппаратура всегда поможет в поиске золота, и этот ценный металл обязательно найдется.
Вконтакте
Одноклассники
Мой мир
Простая схема детектора металлас приложениями
В нашей повседневной жизни мы привыкли наблюдать множество детекторов, которые обнаруживают металлические устройства, такие как пистолеты, бомбы и т. Д. Для предотвращения любого незаконного проникновения оружия и бомб в общественные места, система безопасности разработан путем разработки различных проектов электроники с использованием датчика приближения. Итак, металлоискатель используется для обнаружения любого существующего металла, который находится рядом. Металлоискатель – это электронное устройство, которое используется во многих местах, таких как театры, торговые центры, отели и т. Д.- обнаруживать любые металлические предметы, такие как ножи, оружие или любые другие взрывчатые вещества, спрятанные в багаже человека, несущего их с плохими намерениями; такие металлоискатели особенно полезны для обнаружения скрытых предметов внутри предметов.
МеталлоискательМеталлоискатель
Первый промышленный металлоискатель был разработан в 1960 году и использовался для разведки полезных ископаемых и других промышленных применений. Металлоискатель – это электронное устройство, которое включает в себя генератор, который вырабатывает переменный ток, который проходит через катушку, создающую переменное магнитное поле.Если часть металла находится рядом с катушкой, в металле будет индуцироваться вихревой ток, и это создает собственное магнитное поле. Если для измерения магнитного поля используется другая катушка, изменение магнитного поля, изменение магнитного поля из-за металлического предмета может быть обнаружено.
Металлоискатели используются для обнаружения оружия, такого как оружие, ножи в аэропортах, а также используются в строительной промышленности для обнаружения стальных арматурных стержней в проводах, бетоне, трубах, закопанных в полы и стены.
Схема простого металлоискателя
Основными компонентами схемы простого металлоискателя являются LC-цепь, датчик приближения и зуммер. Цепь LC – это не что иное, как индуктор и конденсатор, которые соединены параллельно. Эта схема активирует датчик приближения, когда он обнаруживает металл рядом с ним. Этот датчик светится светодиодом и издает зуммер.
Схема металлоискателяКогда цепь LC имеет резонансную частоту от любого металла, который находится рядом с ним, будет создано электрическое поле, которое приведет к индукции тока в катушке и изменению сигнала в потоке сигнал через катушку.
Переменный резистор используется для изменения значения датчика, равного цепи LC. Когда металл обнаружен, цепь будет иметь измененный сигнал. Этот измененный сигнал будет подан на датчик приближения, который обнаружит изменение сигнала и отреагирует соответствующим образом. Когда металл обнаружен катушкой, o / p датчика будет 1 мА. Когда катушка находится рядом с металлом, то о / п датчика будет около 10 мА.
Когда вывод o / p высокий, резистор R3 подаст положительное напряжение на транзистор Q1, чтобы включить светодиод, который будет светиться и генерировать жужжащий звук.Здесь резистор R2 используется для ограничения протекания тока.
A Схема металлоискателя с использованием IC 555
Проект схемы принципиальной схемы простого металлоискателя разработан с использованием IC 555, как вы можете видеть на схемах таймера 555, эти схемы обнаруживают металлы и магниты. Когда магнит находится рядом с дросселем 10 мГн, частота o / p изменяется. Эта схема может питаться от источника питания, который может обеспечивать постоянное напряжение от 6 до 12 В. Если металл находится рядом с катушкой L1, он производит изменение частоты колебаний o / p, а затем генерирует жужжащий звук.
Схема металлоискателя с использованием 555 ICМеталлоискатель Роботизированная машина, управляемая приложением Android
Основная цель этого проекта – разработать роботизированную машину, способную обнаруживать металлы впереди на своем пути. Этот роботизированный автомобиль управляется приложением для Android.
Этот проект включает в себя цепь металлоискателя, которая связана с блоком управления, который генерирует сигнал тревоги для пользователя, когда металл находится рядом с ним. Микроконтроллер 8051 используется для желаемой операции.На стороне передатчика приложение Android используется для отправки команд на приемник. Робот движется вперед, назад, вправо или влево. На приемном конце два двигателя соединены с микроконтроллерами 8051 для движения транспортного средства.
Роботизированный автомобиль с металлоискателем, управляемый Android Project Project KitПриложение для Android действует как пульт дистанционного управления, в то время как устройство Bluetooth на стороне приемника подается на микроконтроллер для управления двигателями постоянного тока через ИС драйвера двигателя для требуемой операции.Контур металлоискателя находится в роботе, и операции робота выполняются автоматически, если он обнаруживает металл внизу. Как только робот обнаруживает металл, он издает звуковой сигнал. Кроме того, этот проект можно разработать, прикрепив к роботу беспроводную камеру, чтобы оператор мог дистанционно управлять движением робота, наблюдая за ним на экране.
Робот-детектор металла с использованием технологии RF
Основная цель этого проекта заключается в том, чтобы спроектировать роботизированное транспортное средство, способное воспринимать металлы впереди него на своем пути, и этот робот управляется пультом дистанционного управления с использованием радиочастотной технологии.
Цепь металлоискателя находится в корпусе робота. Операции робота выполняются, если он чувствует металл внизу. Как только робот чувствует этот металл, он издает звуковой сигнал. Это должно предупредить оператора о возможном попадании металла на его пути.
Комплект проекта роботизированного транспортного средства для металлоискателяКроме того, этот проект может быть реализован путем установки на робота беспроводной камеры, чтобы оператор мог дистанционно управлять движением робота, наблюдая за ним на экране.
Надеюсь, эта статья предоставит вам краткую информацию о цепях металлоискателя и принципах его работы. Известны ли вам какие-либо другие практические применения металлоискателей или тепловых извещателей? Вы можете поделиться своими техническими знаниями, разместив свои комментарии в разделе комментариев ниже.
Photo Credits:
. Как сделать простой металлоискатель с использованием микросхемы CS209A
Металлоискатель
Принцип действия предлагаемой схемы металлоискателя довольно простой, но очень интересный. Функция обнаружения запускается путем определения снижения уровня Q в LC-сети, связанной с цепью, в присутствии металла с заданным уровнем близости.
Введение
По сути, встроенный генератор IC CS209 выполнен работоспособным благодаря включению параллельной резонансной LC-настроенной сети в сочетании с резистором обратной связи, подключенным с помощью выводов OSC и RF.
Полное сопротивление настроенной резонансной сети можно ожидать на максимальном уровне, если частота источника возбуждения равна резонансной частоте сети LC-схемы.
При обнаружении присутствия металлического предмета в непосредственной близости к датчику индуктивности амплитуда напряжения LC-сети постепенно начинает падать, что соответствует близости металла к индуктору.
Из-за вышеуказанного фактора, когда колебательный кадр чипа падает и достигает определенного порогового уровня, запускает положение дополнительных выходов, так что они меняют состояния.
Точные технические операции могут быть поняты следующим образом:
Как показано на рисунке, как только металлический объект обнаружен на входе индуктора, конденсатор, подключенный к DEMOD, заряжается через встроенный источник тока 30 мкА. ,
Однако во время процесса обнаружения вышеуказанный ток отклоняется от конденсатора пропорционально сгенерированному отрицательному смещению в LC-сети.
Поэтому заряд от конденсатора удаляется присоединенным к DEMOD с каждым отрицательным циклом, генерируемым в сети LC.
Напряжение постоянного тока с пульсацией на конденсаторе DEMOD затем напрямую определяется внутренним фиксированным уровнем напряжения 1,44.
Когда процедура заставляет внутренний компаратор отключиться, он переключает транзистор, который вводит 23,6 кОм параллельно с данным резистором 4K8.
Этот результирующий опорный уровень в этом случае равен примерно 1,2 В, что приводит к некоторому гистерезису в цепи и идеально подходит для предотвращения неправильного или ложного срабатывания.
Блок обратной связи, подключенный через OSC и RF, используется для настройки диапазона обнаружения цепи.
Увеличивая сопротивление кастрюли, вы, конечно же, увеличиваете дальность обнаружения и, следовательно, точку срабатывания выходов.
Однако точки обнаружения и отключения могут также зависеть от конфигурации LC и Q сети LC.
Как настроить схему металлоискателя
Предлагаемая схема металлоискателя может быть первоначально настроена, выполнив следующие шаги:
Расположите металлический объект на относительно большем расстоянии от индуктора, предполагая, что Q LC находиться на максимальной чувствительности, а расстояние находиться в допустимом диапазоне, обеспечиваемом добротностью индуктора.
С помощью этой настройки отрегулируйте кастрюлю так, чтобы выходы просто сдвигали состояния, указывающие на обнаружение металлического объекта.
Повторите процедуру регулировки, постепенно увеличивая расстояние до оптимальной максимальной чувствительности цепи.
Удаление или смещение металла вручную должно привести к тому, что выходной сигнал схемы изменится, подтверждая безупречную работу схемы.
Хотя схема способна обнаруживать металлы в диапазоне 0.3 дюйма, диапазон может быть соответствующим образом увеличен путем увеличения добротности индуктора.
Коэффициент Q прямо пропорционален чувствительности цепи и степени обнаружения.
О Swagatam
Я инженер-электронщик (dipIETE), любитель, изобретатель, разработчик схем / печатных плат, производитель. Я также являюсь основателем веб-сайта: https://www.homemade-circuits.com/, где я люблю делиться своими инновационными идеями и учебными пособиями.
Если у вас есть какие-либо вопросы, связанные со схемой, вы можете взаимодействовать через комментарии, я буду очень рад помочь!
| | Как работает металлоискательРабота металлоискателей основана на принципах электромагнитной индукции. Металлодетекторы содержат одну или несколько катушек индуктивности, которые используются для взаимодействия с металлическими элементами на земле.Детектор с одной катушкой, показанный ниже, является упрощенной версией детектора, используемого в реальном металлоискателе. Импульсный ток подается на катушку, которая затем индуцирует магнитное поле, показанное синим цветом. Когда магнитное поле катушки движется по металлу, такому как монета на этой иллюстрации, поле индуцирует электрические токи (называемые вихревыми токами) в монете. Вихревые токи индуцируют свое собственное магнитное поле, показанное красным цветом, которое генерирует противоположный ток в катушке, который индуцирует сигнал, указывающий на присутствие металла. ВЕРНУТЬСЯ К ЭЛЕКТРИЧЕСТВУ И МАГНЕТИЗМУ ОБУЧЕНИЯ Вопросы или комментарии? Отправить нам письмо.© 1995-2019 по Майкл У. Дэвидсон и Университет штата Флорида. Все права защищены. Никакие изображения, графика, программное обеспечение, сценарии или апплеты не могут быть воспроизведены или использованы любым способом без разрешения правообладателей. Использование данного веб-сайта означает, что вы соглашаетесь со всеми юридическими условиями, изложенными владельцами. Этот сайт поддерживается нашим |
– принципиальная схема
Это простая схема детектора металла, может найти различный металл и регулируемую чувствительность. Простота использования рядом с металлом. Схема внутри включает в себя несколько компонентов, IC-NE556 находится в центре схемы, принцип моностабильного мультивибратора, который затем отображается на измерителе с подвижной катушкой.
Принцип работы
В этом проекте принцип установки двух тонких металлических листов при установке находится под этим инструментом параллельно металлическому листу, который мы хотим найти, как показано на рисунке 1, на котором появится виртуальный конденсатор.К одному металлическому листу будет подключен вывод 8,12 IC1 / 1. И следующий металлический лист соединится с землей цепи, как показано на рисунке 2. Конденсатор соединен с IC1 / 1, поэтому IC1 / 1, как нестабильный мультивибратор, постоянно генерирует частоту.

Рисунок 1 Конденсаторы виртуальные. Которая вызвала параллель из металла.

Рисунок 2 полные схемы простого металлоискателя
Виртуальная емкость варьируется в зависимости от типа найденного металла и расстояния между металлическими частями до этого инструмента.Изменение виртуальной емкости приведет к тому, что частотный сигнал, который генерируется из IC1 / 1 (NE556), также будет меняться в зависимости от.
Сигнал с вывода 9 IC1 / 1 поступает на вывод 6 IC1 / 2. Который подключен как (Моностабильный мультивибратор) To, выдает прямоугольную волну на вывод 5 каждый раз, когда имеет место срабатывание от IC1 / 1.
Сигнал с контакта 5 IC1 / 2 будет изменен, когда сигнал будет отправлен через резисторы-R4, а конденсатор-C4 будет отфильтрован и станет постоянным напряжением, подаваемым на метр-M1.Для отображения нахождения, чтобы показать нам. Измененный уровень напряжения постоянного тока следует за виртуальной емкостью.
Мы можем отрегулировать чувствительность с помощью VR2, и VR3 выключен, установите регулятор напряжения на нулевую точку иглы измерителя или на полную шкалу слева. Компенсировать отображение счетчика может быть проще.
Строительство
Когда понять принцип работы этого проекта уже. Следующий шаг – создание. Во-первых, оборудование, которое нужно купить раньше. Затем строит печатную плату, как показано на рисунке 3, односторонний макет фактического размера.
Список запчастей.
IC1___NE556__Двойной таймер _____ = 1 шт.
R1___1M 1 / 4W ______________ = 1 шт.
R2 ___ 47K ___ 1 / 4W ___________ = 1 шт.
R3, R4 ___ 470 Ом__1 / 4 Вт _____ = 2 шт.
C1, C2 ___ 2,2 мкФ 16 В__Электролитические конденсаторы ___2 шт.
C6____47 мкФ 16 В ___ Электролитический конденсатор ____1 шт.
VR1___50K подковообразный переменный резистор ____1 шт.
VR2___50K__потенциометр ______ = 1 шт.
VR3___1K___ потенциометр ______ = 1 шт.
C3___1000pF Керамический конденсатор 50 В _____1 шт.
C4, C5 ___ 0,022 мкФ 50 В майларовые конденсаторы _____2 шт.
Измеритель размера M1____200uA или VU
Прочие детали
Печатная плата, провод, коробка,

Рисунок 3 Схема односторонней печатной платы

Рисунок 4 Компоновка компонентов для печатной платы
Далее соберите различные компоненты, аналогичные показанным на рис. 4, прежде чем ставить резисторы в соответствие с приведенной ниже высотой оборудования, и не забывайте соблюдать осторожность относительно ножек устройства и его стоимости.
Настройка
Затем в дальнейшем успешно соберите схему и полностью проверьте цепь. Затем нажмите кнопку включения питания в цепи, а затем отрегулируйте чувствительность (VR2) влево до упора. И поверните регулировочное смещение (VR3) до упора вправо.
Затем посмотрите, как стрелка счетчика отклоняется? Если он не отклоняется, отрегулируйте VR1 на печатной плате. Вы увидите отклонение стрелки метра вверх. Затем отрегулируйте максимальную шкалу VR1, чистая ступенчатая стрелка упадет, так что прекратите регулировку
Позже отрегулируйте VR2 вправо и посмотрите, как стрелка измерителя должна быть направлена вправо, и попробуйте отрегулировать VR3 влево, чтобы увидеть, какая стрелка измерителя влево также будет поймана штрафом.Отрегулируйте VR2 и VR3 закончено в исходное положение. Это указывает на то, что схема работает отлично.
приложений.
Для этого проекта можно проверить объекты со свойством Это металл? Когда мы хотим найти металл. Сначала, установив VR2 и VR3, нажмите выключатель для включения питания.
Затем отрегулируйте VR3 влево. Чтобы повернуть стрелку счетчика слева от шкалы счетчика. Почти конец шкалы вправо, а затем настроить VR2. Для поворота вправо от скромного масштаба.Затем снова настройте VR3 влево. Повернуть стрелку измерителя влево снова в том же месте. Просто этот инструмент доступен для поиска металла.
Когда найден металл, стрелка метра поднимется. Если стрелка измерителя ударилась слишком сильно, после обнаружения металла отрегулируйте VR2 уменьшенным. Этот инструмент может применяться ко многим приложениям. Например, используйте поиск стальной балки с потолком. И т.д.
,