Технические данные электродвигателей серии 4а: Электродвигатели 4А, 4АМ – технические характеристики двигателей, размеры, параметры.
alexxlab | 12.02.2023 | 0 | Разное
Электродвигатели – общие сведения, технические показатели
Компания “ПрофТех”
Главная \ Статьи \ Электродвигатели Ниже приведены технические показатели и основные конструктивные размеры электродвигателей, обычно применяемых для укомплектования вентиляторов и насосов в промышленных, жилых и общественных зданиях. Это – асинхронные электродвигатели трехфазного переменного тока единой серии типов А, АЛ, АО, АОЛ, МА-140 и ТАГ. По способу монтажа они относятся к горизонтальным электродвигателям со станиной на лапах. Таблица 1. Выбор типа электродвигателей в зависимости от состояния воздушной среды помещений
Таблица 2.
Шкивы к электродвигателям
Шкивы типа ШР для плоскоременной передачи к электродвигателям единой серии (см. рис. 1)
Шкивы типа ШК для клиноременной передачи к электродвигателям единой серии (см.
Назад | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
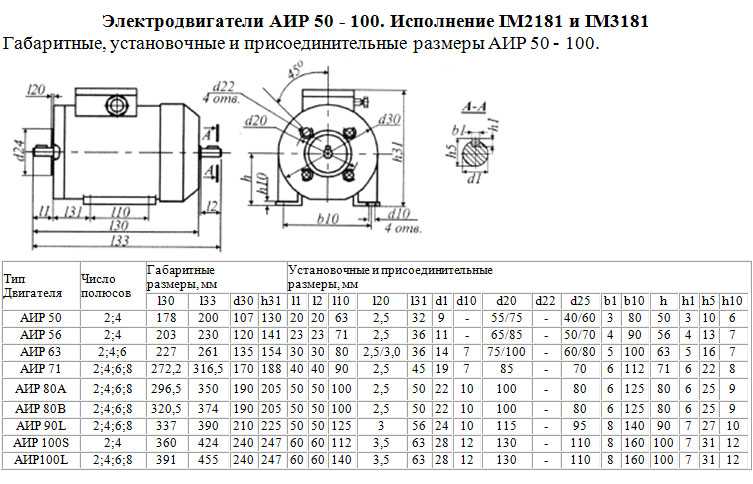
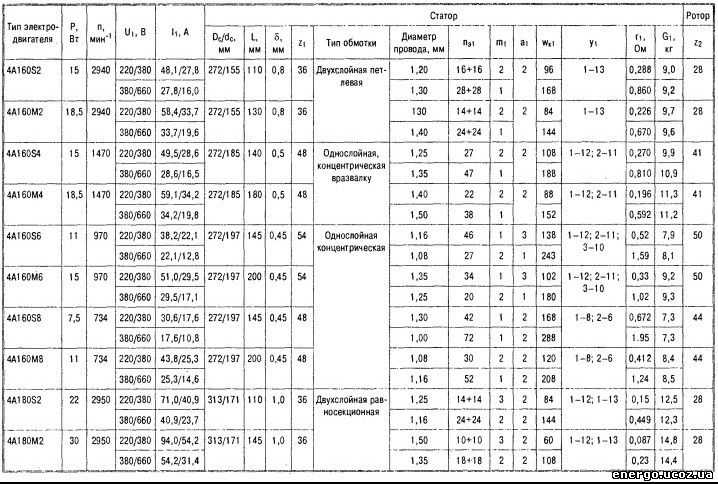
 Технические данные и основные габаритные размеры асинхронных электродвигателей с короткозамкнутым ротором мощностью до 100 кВт
Технические данные и основные габаритные размеры асинхронных электродвигателей с короткозамкнутым ротором мощностью до 100 кВт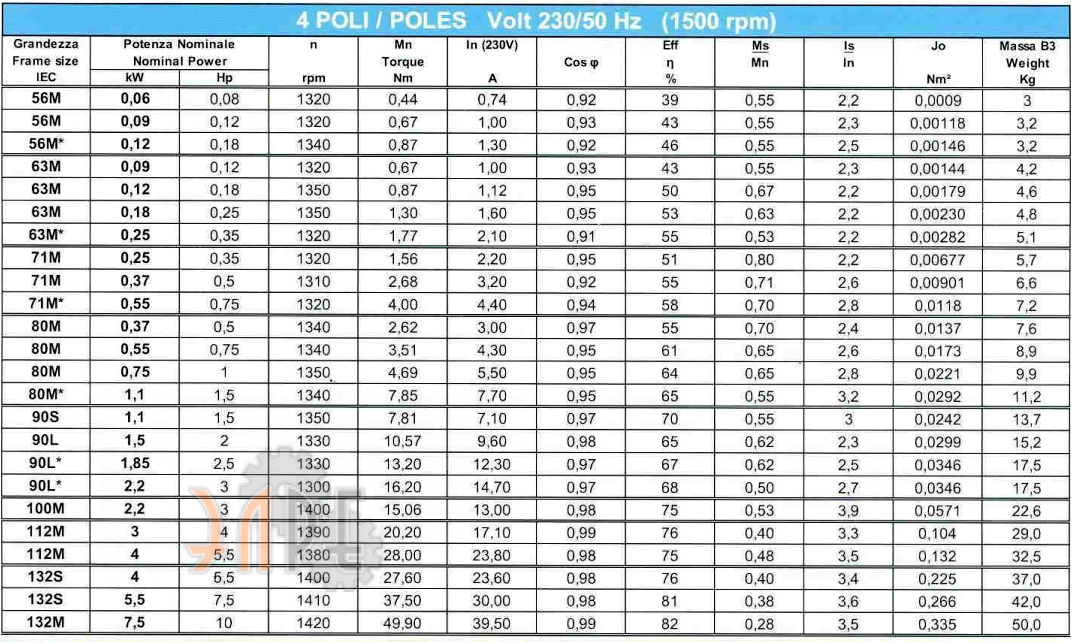 1
1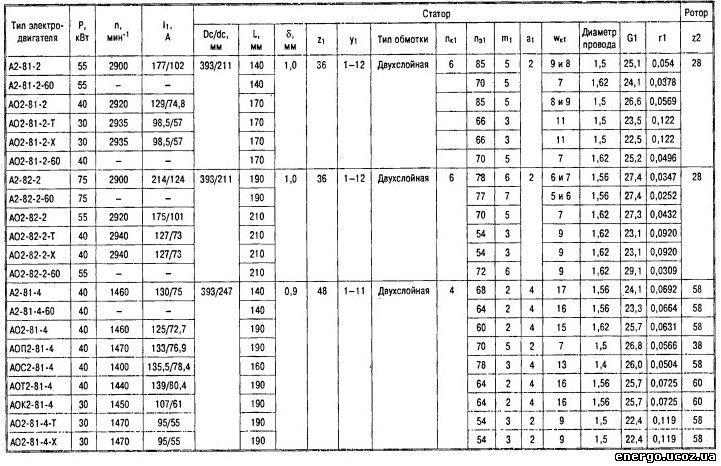 рис. 2)
рис. 2)2.
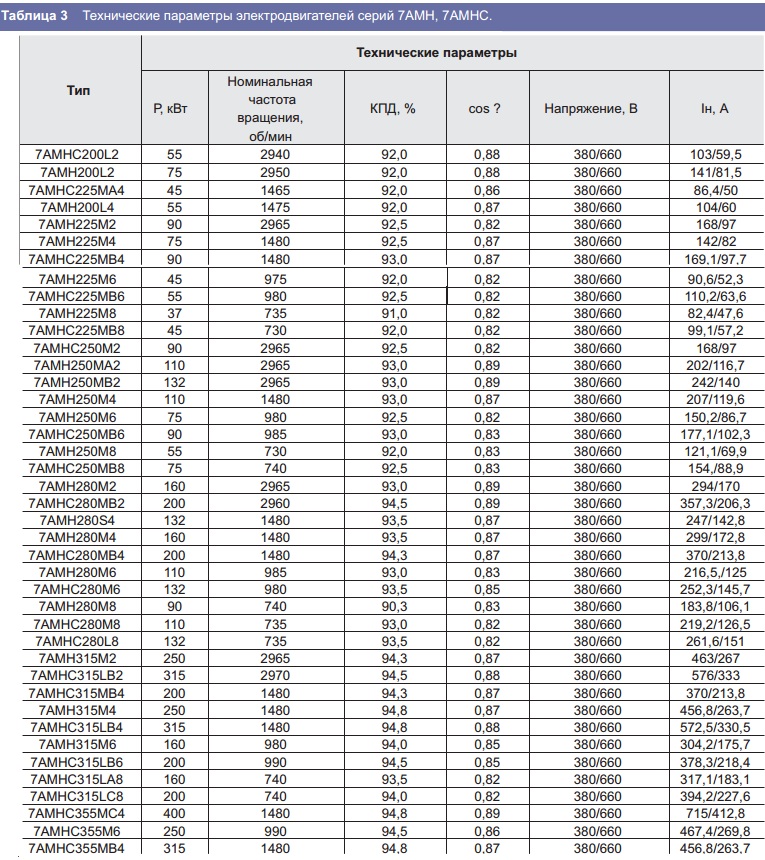
 3.3. Таблица технических данных электродвигателей серии аир
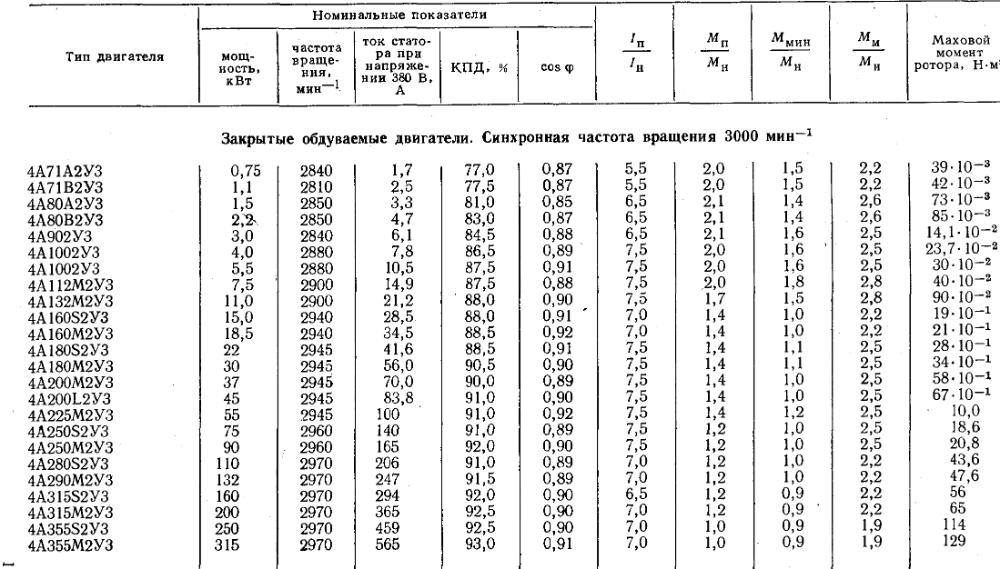
3.3. Таблица технических данных электродвигателей серии аирТехнические данные электродвигателей серии АИР (ГОСТ 183-74) и 4А (ГОСТ 19523-81) приведены в табл. 2.3.3.
Далее как для первого, так и для второго способа подбирают по табл. 2.3.3 ближайшую к стандартную мощность электродвигателя .
Проверка двигателя на перегрузку. Она преследует цель предотвратить «опрокидывание» (остановку двигателя под нагрузкой) при резком увеличении нагрузки. Проверку производят для возможных неблагоприятных условиях эксплуатации, когда напряжение в электросети понижено и нагрузка достигает максимального значения.
Перегрузка асинхронных электродвигателей допускается до 8 %. При невыполнении этого условия следует принимать двигатель ближайшей большей мощности. Проверку выбранного двигателя на перегрузку можно произвести также и по условию ,
где – номинальная
мощность двигателя по справочнику, кВт; – максимальный
момент при эксплуатации (по графику
нагрузки), кНм; –
асинхронная частота вращения вала
электродвигателя по справочнику, об/мин; – кратность
пускового момента по каталогу на
электродвигатель.
Если условие не выполняется, то следует выбрать двигатель большей мощности.
Далее в любом из трех рассмотренных случаев по табл. 2.3.3 подбирают ближайшую к асинхронную частоту вращения вала электродвигателя (или также возможен выбор ее из условия ).
Если требуемая частота оказывается примерно в середине между двумя стандартными значениями , то следует сравнить размеры обоих двигателей. Обозначения двигателей в табл. 2.3.3 содержат две или три цифры, после которых приведены буквы, например: 90L, 100S, 112М. Цифрами обозначен размер h – высота оси вала от опорной поверхности лапок двигателя. Эти цифры характеризуют также и другие размеры электродвигателя. Рекомендуют выбирать электродвигатель с меньшим числом в обозначении (с меньшей высотой h). Масса, размеры и стоимость такого двигателя меньше.
Если же это число
у обоих двигателей одинаковое,
рекомендуется выбрать двигатель с
меньшей частотой вращения вала.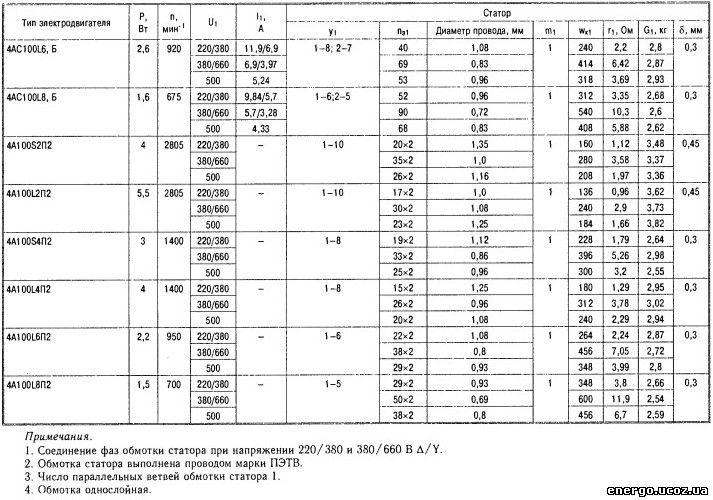 Масса,
размеры и стоимость обоих двигателей
примерно одинаковые, а передаточные
числа и, следовательно, размеры передачи
будут меньше.
Масса,
размеры и стоимость обоих двигателей
примерно одинаковые, а передаточные
числа и, следовательно, размеры передачи
будут меньше.
Рекомендуется просчитать передачи для обоих вариантов двигателей. Затем провести сравнения размеров двигателей и передач и окончательно выбрать вариант с меньшими размерами.
2.4. Кинематические расчеты
Определение передаточного отношения привода и его разбивка по ступеням передач проводятся в следующей последовательности.
2.4.1. Определяют общее передаточное число привода
, (2.4.1)
где , мин-1 – частота вращения приводного вала; , мин-1 – асинхронная частота вращения вала выбранного электродвигателя.
Таблица 2.4.1
Двигатели закрытые обдуваемые единой серии АИР (тип/асинхронная частота вращения)
Мощность, кВт | Синхронная частота вращения вала двигателя, мин-1 | |||||||||||
3000 | 1500 | 1000 | 750 | |||||||||
Типоразмер | Асинхронная частота вращения, мин’1 | Типоразмер | Асинхронная частота враще-ния, мин’1 | Типоразмер | Асинхронная частота вращения, мин’1 | Типоразмер | Асинхронная частота вращения, мин’1 | |||||
0,75 | 71А2 | 2820 | 2,2 | 71 В4 | 1350 | 2,2 | 80А6 | 920 | 2,2 | 90LA8 | 705 | 2,2 |
1,1 | 71В2 | 2805 | 2,2 | 80А4 | 1395 | 2,2 | 80В6 | 920 | 2,2 | 90LB8 | 715 | 2,2 |
1,5 | 80А2 | 2850 | 2,2 | 80В4 | 1395 | 2,2 | 90L6 | 925 | 2,2 | 100L8 | 702 | 2,2 |
2,2 | 80В2 | 2850 | 2. | 90L4 | 1395 | 2,2 | 100L6 | 945 | 2,2 | 112МА8 | 709 | 2,2 |
3 | 90L2 | 2850 | 2,2 | 100S4 | 1410 | 2,2 | 112МА6 | 950 | 2,2 | 112МВ8 | 709 | 2,2 |
4 | 100S2 | 2850 | 2,2 | 100L4 | 1410 | 2,2 | 112МВ6 | 950 | 2,2 | 132S8 | 716 | 2,2 |
5,5 | 100L2 | 2850 | 2,2 | 112М4 | 1432 | 2,2 | 132S6 | 960 | 2,2 | 132М8 | 712 | 2,2 |
7,5 | 112М2 | 2895 | 2,2 | 132S4 | 1440 | 2,2 | 132М6 | 960 | 2,2 | 160S8 | 727 | 2,4 |
11 | 132М2 | 2910 | 2,2 | 132М4 | 1447 | 2,2 | 160S6 | 970 | 2,5 | 160М8 | 727 | 2,4 |
15 | 160S2 | 2910 | 2,7 | 160S4 | 1455 | 2,9 | 160Мб | 970 | 2,6 | 180М8 | 731 | 2,2 |
18,5 | 160М2 | 2910 | 2,7 | 160М4 | 1455 | 2,9 | 180М6 | 980 | 2,4 | — | — | — |
22 | 180S2 | 2919 | 2,7 | 180S4 | 1462 | 2,4 | — | — | — | — | — | — |
30 | 180М2 | 2925 | 2,7 | 180М4 | 1470 | 2,7 | — | — | — | — | — | — |
Примечания: Пример условного обозначения двигателя: «Двигатель AHP100L2 ТУ; Мn – пиковое значение
электромагнитного момента. 16—525.564—84». | ||||||||||||
 2
2 М–
номинальный момент двигателя.
М–
номинальный момент двигателя.Значения символов в условных обозначениях
А – род двигателя – асинхронный;
И – двигатель выполнен новой серии стран Интерэлектрико;
Р – привязка мощностей и установочных размеров по I варианту, т. е. основного исполнения с одним цилиндрическим концом, со шпонкой, нормальной точности.
Цифра, стоящая за обозначением АИР, обозначает высоту h от основания до оси вращения.
Буквы A, B обозначают длину сердечника статора.
Буквы S, M или L обозначают установочные размеры на длине станины.
Цифры 2, 4, 6, 8 обозначают число полюсов.
Электродвигатель 4А 801-4
| Мощность, 50 Гц (кВт) | 0,55 |
| Напряжение, 50 Гц (В) | 230/400 |
| Скорость, 50 Гц (об/мин) | 1390 |
| Ток, 50 Гц, 230 В (А) | 2,5 |
| Ток, 50 Гц, 400 В (А) | 1,4 |
| Коэффициент мощности, 50 Гц (cos φ) | 0,75 |
| Эффективность 50 Гц, 100 % | 71 |
| Мощность, 60 Гц (кВт) | 0,66 |
| Напряжение, 60 Гц (В) | 275/480 |
| Скорость, 60 Гц (об/мин) | 1668 |
| Ток, 60 Гц, 460 В (А) | 1,50 |
| Типоразмер | 80 |
| Столбы | 4 |
| Крепление (IM) | В3 |
| Диаметр вала (мм) | 19 |
| Обязанность | С1 |
| Класс изоляции | Ф |
| Степень защиты (IP) | 55 |
| Класс эффективности | эфф2 |
| Отношение пускового тока к номинальному току (Ia/In) | 5,2 |
| Отношение пускового крутящего момента к номинальному крутящему моменту (Ма/Мн) | 2,3 |
| Отношение подметающего крутящего момента к номинальному крутящему моменту (Mmax/Mn) | 2,4 |
| Момент инерции, (Дж), (кгм²) | 0,0018 |
| Серия продуктов | 4А |
| Охлаждение (IC) | 411 |
| Класс повышения температуры | Ф |
| Звуковое давление | 48 |
| Вес нетто (кг) | 9,4 |
| Цвет | Синий, RAL 5010 |
| Корпус | Алюминий |
| Подшипник ДЭ | 6204 2З С3 |
| Подшипник NDE | 6204 2З С3 |
Электродвигатель — Технический центр Эдисона
|
 История и изобретатели
История и изобретатели Электрический двигатель был впервые разработан в 1830-х годах, через 30 лет после первая батарея. Интересно, что мотор был разработан до первого динамо или генератор.
1.) История и изобретатели: 1834
– Томас Давенпорт из Вермонта разработали первый настоящий электродвигатель («настоящий» означает
достаточно силен, чтобы выполнить задачу), хотя Джозеф
Генри и Майкл
Фарадей создал устройства раннего движения, используя электромагнитные поля. Мировой удар электродвигателя перед лампочками: Только в 1873 году электрический двигатель наконец добился коммерческого успеха. С 1830-х годов тысячи инженеров-новаторов усовершенствовали двигатели и создали множество вариаций. См. другие страницы для более подробной информации об обширной истории электродвигателя. |
 Первые «моторы» создавали вращающиеся диски или рычаги,
качался взад-вперед. Эти устройства не могли сделать никакой работы для человечества.
но были важны для того, чтобы проложить путь к лучшим двигателям в будущем.
Различные двигатели Давенпорта были
возможность запуска модели тележки по круговой дорожке и другие задачи.
Тележка позже оказалась первым важным приложением
электроэнергии (это была не лампочка). рудиментарный
полноразмерные электрические тележки
были окончательно построены через 30 лет после смерти Давенпорта в 1850-х годах.
Первые «моторы» создавали вращающиеся диски или рычаги,
качался взад-вперед. Эти устройства не могли сделать никакой работы для человечества.
но были важны для того, чтобы проложить путь к лучшим двигателям в будущем.
Различные двигатели Давенпорта были
возможность запуска модели тележки по круговой дорожке и другие задачи.
Тележка позже оказалась первым важным приложением
электроэнергии (это была не лампочка). рудиментарный
полноразмерные электрические тележки
были окончательно построены через 30 лет после смерти Давенпорта в 1850-х годах.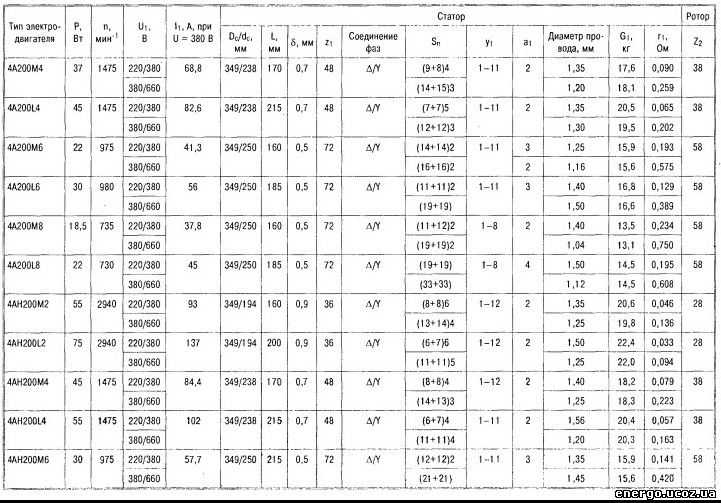
Провода двигателя
к генератору:
После
слабые электродвигатели были разработаны Фарадеем и Генри, еще одним
пионер по имени Ипполит Пикси понял, что, запустив
мотор назад он мог создавать импульсы электричества. К 1860-м годам
разрабатывались мощные генераторы. Электротехническая промышленность не могла начаться, пока
генераторы были разработаны, потому что батареи не были экономичным способом питания
потребности общества. Читать о генераторы
и динамо тут >
2. )
Как работают двигатели )
Как работают двигателиЭлектродвигатели могут питаться переменным (AC) током или постоянным током (DC). Двигатели постоянного тока были разработаны первыми и имеют определенные преимущества и недостатки. Каждый тип двигателя работает по-разному, но все они используют силу электромагнитного поля. Мы поговорим об основных принципах электромагнитных полей. в двигателях, прежде чем вы сможете перейти к различным типам двигателей. АС В электродвигателях используется вторичная и первичная обмотка (магнит), первичная подключается к сети переменного тока (или непосредственно к генератору) и находится под напряжением. Вторичный получает энергию от основного, не касаясь его напрямую. Это делается с помощью сложные явления, называемые индукцией. Справа: инженер работает над индивидуальными модификациями дрона-октокоптера. |
 Восемь крошечных DC
двигатели создают достаточную мощность, чтобы поднять фунты полезной нагрузки. Более новые конструкции двигателей, подобные этому, используют
редкоземельные металлы в статоре для создания более сильных магнитных полей в меньших и более легких
пакеты.
Восемь крошечных DC
двигатели создают достаточную мощность, чтобы поднять фунты полезной нагрузки. Более новые конструкции двигателей, подобные этому, используют
редкоземельные металлы в статоре для создания более сильных магнитных полей в меньших и более легких
пакеты. | Выше: универсальный двигатель, обычно используемый в большинстве электроинструментов. Он имеет тяжелый плотный ротор. | Выше: асинхронный двигатель может иметь «беличью клетку» или полый вращающийся катушка или тяжелая арматура. |
2.a) Части электродвигателя:
Существует много видов электродвигателей, но в целом они имеют схожие детали. Каждый мотор
имеет статор , который может быть постоянным магнитом (как показано в «универсальном двигателе» выше) или намотанным изолированным проводом.
(электромагнит как на фото вверху-справа). Ротор находится посередине (большую часть времени) и подлежит
к магнитному полю
создается статором. Ротор вращается, поскольку его полюса притягиваются и отталкиваются полюсами статора. Смотрите наши
видео ниже, показывающее, как это работает. В этом видео рассказывается о бесщеточном двигателе постоянного тока, в котором ротор находится снаружи, в других двигателях.
тот же принцип работает наоборот, с электромагнитами снаружи. Видео (1 минута):
Каждый мотор
имеет статор , который может быть постоянным магнитом (как показано в «универсальном двигателе» выше) или намотанным изолированным проводом.
(электромагнит как на фото вверху-справа). Ротор находится посередине (большую часть времени) и подлежит
к магнитному полю
создается статором. Ротор вращается, поскольку его полюса притягиваются и отталкиваются полюсами статора. Смотрите наши
видео ниже, показывающее, как это работает. В этом видео рассказывается о бесщеточном двигателе постоянного тока, в котором ротор находится снаружи, в других двигателях.
тот же принцип работает наоборот, с электромагнитами снаружи. Видео (1 минута):
Мощность двигателя:
Мощность двигателя (крутящий момент) определяется напряжением и
длина провода в электромагните в статоре,
чем длиннее провод (что означает больше катушек в статоре), тем сильнее магнитное поле. Это означает большую мощность для
повернуть ротор. Посмотрите наше видео, которое относится как к генераторам, так и к двигателям.
Узнать больше.
Это означает большую мощность для
повернуть ротор. Посмотрите наше видео, которое относится как к генераторам, так и к двигателям.
Узнать больше.
Арматура – вращающаяся часть двигателя – раньше ее называли ротором, она поддерживает вращающиеся медные катушки. На фото ниже вы не видите катушки, потому что они плотно заправлены в якорь. Гладкий корпус защищает катушки от повреждений.
Статор – Корпус и катушки, составляющие внешнюю часть двигателя. статор создает стационарное магнитное поле.
Выше: в этом статоре отчетливо видны четыре отдельные катушки (якорь был удален)
Обмотка или
“Катушка” – медные провода, намотанные на сердечник, используемые для создания
или получать электромагнитную энергию.
Проволока, используемая в обмотки ДОЛЖНЫ быть изолированы. На некоторых фотографиях вы увидите, как выглядит как оголенные обмотки медного провода, это не так, это просто эмалированная с прозрачным покрытием.
Медь Самый распространенный материал для обмоток. Алюминий также используется но должен быть толще, чтобы нести те же электрические загружайте безопасно. Медные обмотки позволяют использовать двигатель меньшего размера. Подробнее о меди >
Сгорел мотор, поиск неисправности:
Если двигатель работает слишком долго или с чрезмерной
нагрузки, он может «сгореть». Это означает, что высокая температура вызвала
изоляция обмотки разрушается или расплавляется, обмотки замыкаются
когда они соприкасаются и двигатель повреждается. Вы также можете сжечь двигатель, подав на него большее напряжение, чем
Обмоточные провода рассчитаны на.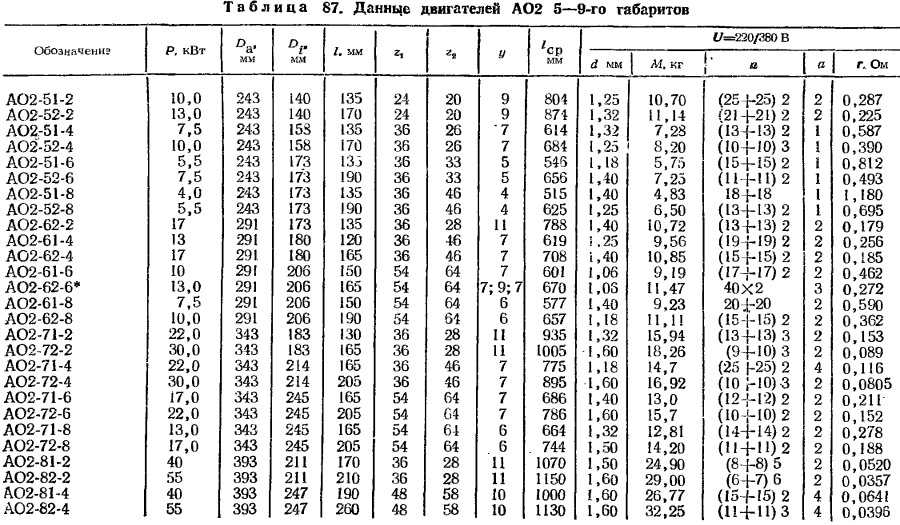 В этом случае провод расплавится в самом слабом месте, разорвав соединение. Ты можешь
проверьте двигатель, чтобы увидеть, не сгорел ли он таким образом, проверяя Ом (сопротивление) на мультиметре.
В общем, вы хотите искать черные метки в обмотках, когда проверяете двигатель.
В этом случае провод расплавится в самом слабом месте, разорвав соединение. Ты можешь
проверьте двигатель, чтобы увидеть, не сгорел ли он таким образом, проверяя Ом (сопротивление) на мультиметре.
В общем, вы хотите искать черные метки в обмотках, когда проверяете двигатель.
Беличья клетка – вторая катушка в асинхронном двигателе, см. ниже
посмотреть, как это работает
Индукция – генерация электродвижущей силы в замкнутом
цепь переменным магнитным потоком через цепь. В сети переменного тока
уровень мощности повышается и понижается, это заряжает обмотку на
момент, создающий магнитное поле. Когда мощность падает в цикле
магнитное поле не может поддерживаться, и он разрушается. Это действие
передает мощность через магнетизм в другую обмотку или катушку. УЧИТЬСЯ
БОЛЬШЕ об индукции здесь.
3.) Типы электродвигателей переменного тока
|
3. а) Индукция
Двигатель
а) Индукция
Двигатель
3.b) Универсальный двигатель (может использовать постоянный или переменный ток)
3.c) Синхронные двигатели
3.d) Электродвигатели с экранированными полюсами
|
См. нашу страницу, посвященную асинхронным двигателям, здесь >
|
Это мощный
двигатель, который можно использовать с
как переменного, так и постоянного тока.
Преимущества :
– Высокий пусковой крутящий момент и небольшой размер
бытовой электроинструмент)
-Может работать на высоких скоростях (отлично подходит для стиральных машин и электродрелей)
Недостатки:
– Щетки со временем изнашиваются
Применение: бытовая техника, ручной электроинструмент
См. видео ниже:
|
Этот двигатель
аналогичен асинхронному двигателю, за исключением того, что он движется с частотой сети.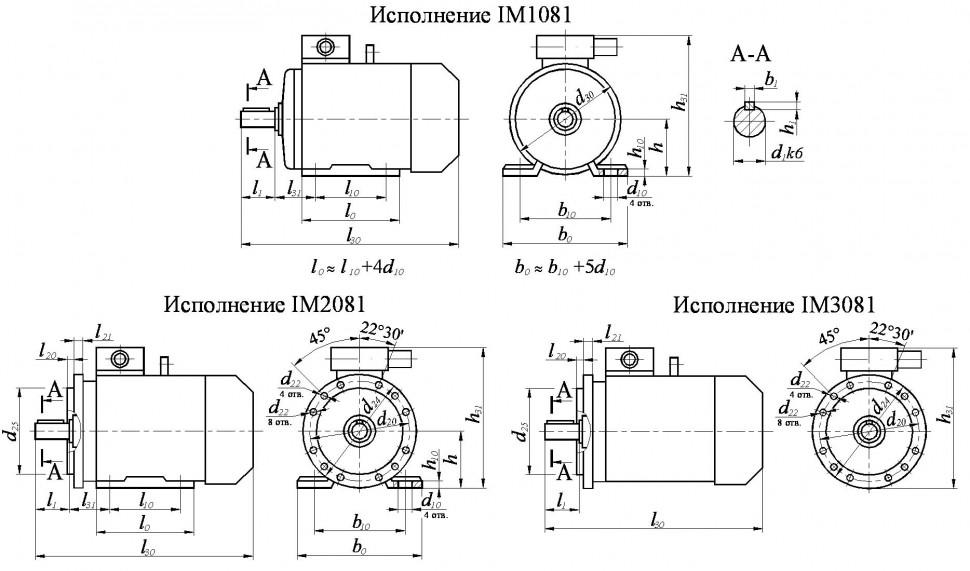
Двигатель Сельсин был разработан в 1925 году и сейчас известен как Synchro. Узнать больше о их здесь.
Преимущества: Обеспечивает постоянную скорость, которая определяется
количество полюсов и частота питающей сети переменного тока.
Недостатки: Не может работать с переменным крутящим моментом, этот двигатель
останавливаться или «вытягиваться» при заданном крутящем моменте.
Применение: и часы использует синхронные двигатели для обеспечения точной скорости вращения для
Руки. это аналог двигателя и пока скорость точная,
шаговый двигатель был бы лучше для работы с компьютерами, так как он
работает на жестких «шагах» разворота.
|
|
 Имеет только одну катушку с вращающимся валом.
в центре отставание потока, проходящего вокруг катушки, вызывает
интенсивность магнита для перемещения вокруг катушки. Это получает
центральный вал с вращающейся вторичной катушкой.
Имеет только одну катушку с вращающимся валом.
в центре отставание потока, проходящего вокруг катушки, вызывает
интенсивность магнита для перемещения вокруг катушки. Это получает
центральный вал с вращающейся вторичной катушкой.
Преимущества: достигает высокого уровня крутящего момента после того, как ротор
начал быстро вращаться.
Используется в вентиляторах, приборах
Недостатки: медленный запуск, низкий пусковой момент. Используется в вентиляторах,
обратите внимание на медленный старт вентиляторов.
Этот двигатель также используется в сливах стиральных машин, консервных ножах и
прочая бытовая техника.
Другие типы двигателей лучше подходят для более мощных потребностей выше 125
Вт.
См. видео ниже:
4.) Двигатели постоянного тока (DC):
Двигатели постоянного тока были первым типом электродвигателей. Обычно они составляют 75-80%. эффективный. Они хорошо работают на переменных скоростях и имеют большой крутящий момент.
4.a) Общая информация
4.b) Коллекторные двигатели постоянного тока
4.b.1) Двигатель постоянного тока с параллельным возбуждением
4.b.2) Двигатель постоянного тока с последовательным возбуждением
4.b.3) Двигатели блинчатого типа
4.b.4) Двигатель постоянного тока с постоянными магнитами
4.b.5 ) Отдельное возбуждение (Sepex)
4.c) Бесщеточные двигатели постоянного тока
4.c.1) Шаговый двигатель
4. c.2) Электродвигатели постоянного тока без сердечника/без железа
c.2) Электродвигатели постоянного тока без сердечника/без железа
Матовый
Двигатели постоянного тока:
Первый двигатель постоянного тока двигатели использовали щетки для передачи тока на другую сторону двигателя. Щетка названа так, потому что сначала она напоминала форму метлы. Маленькие металлические волокна терлись о вращающуюся часть двигателя. поддерживать постоянный контакт. Проблема с кистями в том, что они изнашиваются. вышел со временем из-за механики. Щетки будут создавать искры из-за трения. В парках часто расплавлялась изоляция и вызывали шорты в якоре и даже расплавил коллектор.
Первые моторы использовались на трамваях.
Использует разделение
кольцевой коллектор со щетками.
Преимущества:
-Используется во множестве применений, легко регулируется скорость с помощью уровня
напряжения для управления.
– Имеет высокий пусковой момент (мощный пуск)
Ограничения: щетки создают трение и искрение, это может привести к перегреву двигателя
устройство и расплавить/сжечь щетки, поэтому максимальная скорость вращения
ограничено. Искры также вызывают радиочастоту. вмешательство. (РФИ)
Есть
пять типов двигателей постоянного тока со щетками:
Двигатель постоянного тока с шунтирующим возбуждением
Двигатель постоянного тока с последовательным возбуждением
Составной двигатель постоянного тока – совокупный составной и дифференциально-составной двигатель
Двигатель постоянного тока с постоянными магнитами
С независимым возбуждением
Мотор-блинчик
Бесщеточный Двигатели постоянного тока:
Щетка
заменен внешним электрическим выключателем, синхронизированным с
положение двигателя (при необходимости он изменит полярность, чтобы сохранить
вал двигателя вращается в одном направлении)
– Более эффективен, чем щеточные двигатели
– Используется, когда необходимо точное регулирование скорости (например, в дисководах, ленточных накопителях).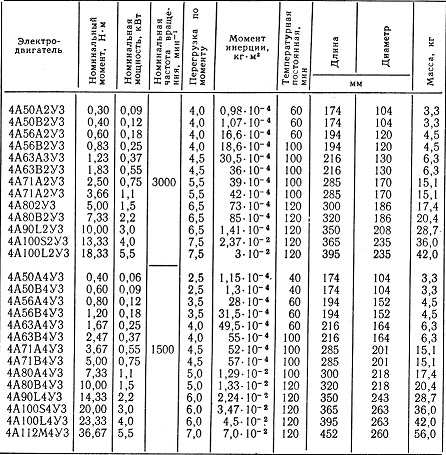 машины, электромобили и т. д.)
машины, электромобили и т. д.)
– Долгий срок службы, так как работает при более низкой температуре и нет щеток
изнашиваться.
Типы
бесщеточные двигатели постоянного тока:
Шаговый двигатель
Двигатели постоянного тока без сердечника / без сердечника
4.b) ЩЕТЧАТЫЙ ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА:
4.b.1) DC Двигатель с параллельной обмоткой
Шунт постоянного тока двигатель подключен так, что катушка возбуждения подключена параллельно арматура. Обе обмотки получают одинаковое напряжение. Катушка шунтирующего поля намотан множеством витков тонкой проволоки для создания высокого сопротивления. Этот гарантирует, что катушка возбуждения будет потреблять меньше тока, чем якорь (ротор).
Арматура
(видно выше, это длинная толстая цилиндрическая вращающаяся часть) имеет толстую
медные провода, это так, что большой ток может проходить через него к
завести мотор.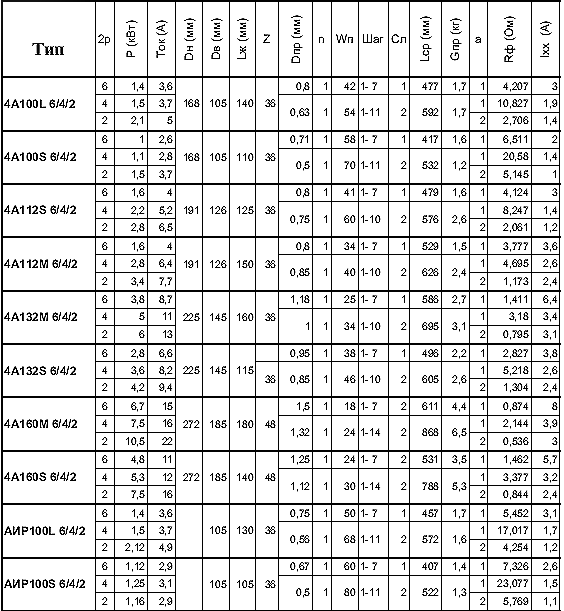
В качестве арматуры витков (см. фото ниже) ток ограничивается противоэлектродвижущей сила.
Сила катушки шунтирующего поля определяет скорость и крутящий момент двигателя.
Преимущества: Шунтирующий двигатель постоянного тока регулирует собственную скорость. Это означает, что если загрузить добавляется, якорь замедляется, CEMF уменьшается, что приводит к тому, что якорь ток увеличивается. Это приводит к увеличению крутящего момента, что помогает переместить тяжелый груз. При снятии нагрузки якорь ускоряется, CEMF увеличивается, что ограничивает ток, а крутящий момент уменьшается.
Конвейер
пример ремня : Представьте, что конвейер движется с заданной скоростью, затем
на пояс попадает тяжелая коробка. Этот тип двигателя будет поддерживать движение ленты.
с постоянной скоростью независимо от того, сколько коробок движется по ленте.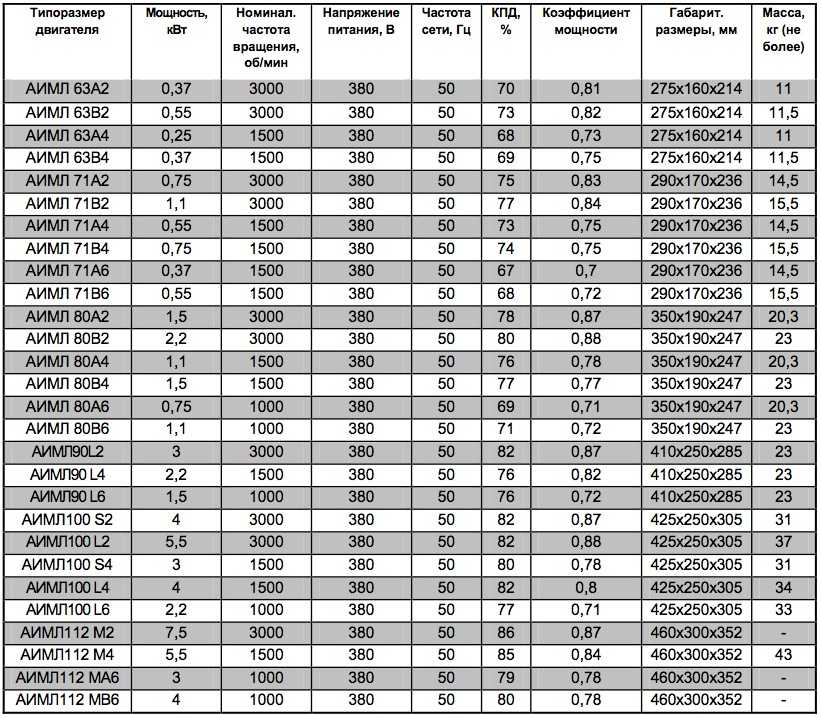
См. видео ниже о шунтирующем двигателе постоянного тока в действии!:
4.b.2) постоянный ток двигатель с последовательным возбуждением
Двигатель с обмоткой серии представляет собой двигатель постоянного тока с самовозбуждением. Обмотка возбуждения подключена внутри последовательно с обмоткой ротора. Таким образом, обмотка возбуждения в статоре подвергается воздействию к полному току, генерируемому обмоткой ротора.
Этот тип двигателя похож на двигатель постоянного тока с параллельной обмоткой, за исключением того, что обмотки возбуждения сделаны из более толстого провода, поэтому они могут выдерживать более высокие токи.
Использование: Этот тип двигателя используется в промышленности в качестве пускового двигателя из-за большого крутящего момента.
Узнайте больше о двигателе с последовательным возбуждением:
Статья 1
Статья 2
4.b.3) Блин Двигатель постоянного тока (также известный как двигатель с печатным якорем)
Блинчик двигатель – безжелезный двигатель. Большинство двигателей имеют медную обмотку вокруг железное ядро.
Демонстрация видео Примеры блинных моторов:
Преимущества:
Точное регулирование скорости, плоский профиль, не имеет зазубрин, вызываемых
железом в электромагните
Недостатки:
плоская форма подходит не для всех применений
Имеет обмотку
в форме плоского диска из эпоксидной смолы между двумя магнитами с высоким магнитным потоком.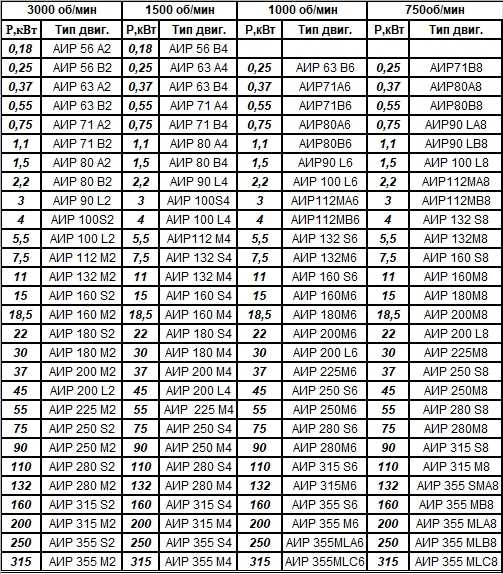 это полностью
без железа, что делает большую эффективность. Используется в сервоприводах, был первым
разработан как моторы стеклоочистителя и видеоиндустрии, так как он
был очень плоским в профиле и имел хороший контроль скорости. Компьютеры и видео/аудио
запись всей используемой магнитной ленты, точный и быстрый контроль скорости был
нужен был поэтому блинный мотор для этого и разрабатывался. Сегодня он используется
во множестве других приложений, включая робототехнику и сервосистемы.
это полностью
без железа, что делает большую эффективность. Используется в сервоприводах, был первым
разработан как моторы стеклоочистителя и видеоиндустрии, так как он
был очень плоским в профиле и имел хороший контроль скорости. Компьютеры и видео/аудио
запись всей используемой магнитной ленты, точный и быстрый контроль скорости был
нужен был поэтому блинный мотор для этого и разрабатывался. Сегодня он используется
во множестве других приложений, включая робототехнику и сервосистемы.
4.b.4) Составной двигатель постоянного тока (кумулятивный и дифференциально-составной)
Это еще один двигатель с самовозбуждением как с последовательными, так и с шунтирующими катушками возбуждения. Он имеет эффективную регулировку скорости и приличный пусковой момент.
Узнайте больше об этом типе двигателя здесь.
4.b.5) Двигатель постоянного тока с постоянными магнитами
Этот тип двигателя хорошо работает на высоких скоростях и может быть очень компактным.
Применение: компрессоры, другие промышленные применения.
Узнайте больше об этом типе двигателя здесь.
4.b.6) Отдельно возбужденный (sepex)
SepEx имеет обмотку возбуждения, которая питается отдельно от якоря с помощью прямого текущий сигнал. Полевой магнит также имеет собственный источник постоянного тока. В результате вы увидите это тип двигателя имеет четыре провода – 2 для возбуждения и 2 для якоря.
Этот двигатель представляет собой коллекторный двигатель постоянного тока. который имеет более широкие кривые крутящего момента, чем двигатель постоянного тока с последовательной обмоткой.
Узнайте больше об этом типе двигателя здесь.
4.c) Бесщеточные двигатели постоянного тока:
4.c.1 ) Степпер Двигатель
Шаговый двигатель двигатель представляет собой тип бесщеточного двигателя, который перемещает центральный вал на один часть оборота за раз. Это делается с помощью зубчатых электромагнитов. вокруг централизованного железяка в форме шестеренки. Есть много видов шаговых двигателей. Они используются в системах, которые перемещают объекты в точное положение, как 9Сканер 0208, дисковод и промышленная лазерная резка устройства .
См. видео шагового двигателя в действии ниже:
4.c.2) Без сердечника / Ironless DC Motors
Обмоточная медь
или алюминиевый сердечник вращается вокруг магнита без использования железа.