Тиристорный электропривод: Тиристорный электропривод постоянного тока “ЭПТОН-М” для шахтной подъемной машины — «ЭРАСИБ»
alexxlab | 27.08.1995 | 0 | Разное
Тиристорный электропривод | это… Что такое Тиристорный электропривод?
Электропривод, в котором режим работы его исполнительного двигателя (ИД) или иного исполнительного механизма (ИМ) регулируется преобразовательным устройством (ПУ) на Тиристорах (см. Преобразовательная техника).
В Т. э. переменного тока в качестве ИД чаще всего применяют асинхронные и синхронные трёхфазные электродвигатели, режим работы которых можно регулировать изменением частоты и амплитуды напряжения, подводимого к статору, а в случае синхронного двигателя — также изменением тока в обмотке возбуждения. В Т. э. этого типа, питающихся от источника переменного тока, регулирующим ПУ обычно служит тиристорный Преобразователь частоты, выполненный либо с промежуточным звеном постоянного или переменного тока, либо по схеме с непосредственной связью. При питании таких Т. э. от источника постоянного тока в качестве ПУ используют автономный Инвертор. Реверсирование ИД (см. Реверсивный электропривод) в Т. э. переменного тока осуществляют, изменяя последовательность чередования фаз напряжения, подводимого к статору.
Реверсивный электропривод) в Т. э. переменного тока осуществляют, изменяя последовательность чередования фаз напряжения, подводимого к статору.
В Т. э. постоянного тока применяют двигатели постоянного тока с последовательным, параллельным, смешанным или независимым возбуждением, регулирование режимов работы которых можно производить по цепи обмотки якоря или обмотки возбуждения. В Т. э. этого типа, питающихся от источника переменного тока, ПУ служит тиристорный Выпрямитель тока. Если питание таких Т. э. осуществляется от источника постоянного тока, то ПУ выполняют в виде импульсного регулятора постоянного тока или системы «инвертор — выпрямитель» с промежуточным звеном переменного тока повышенной частоты. В Т. э. постоянного тока реверсирование ИД производят изменением направления тока в обмотке якоря или обмотке возбуждения двигателя (при этом применяют второе такое же ПУ, включаемое встречно-параллельно с первым по отношению к цепи ИД).
Для гальванической развязки цепей питания и нагрузки, а также при необходимости согласовать величины напряжения источника питания и ИД в Т.
Т. э. находят применение в различных отраслях промышленности и на транспорте. Мощность Т. э. составляет (в зависимости от их назначения) от нескольких квт до 10 Мвт и выше.
Лит.: Ривкин Г. А., Преобразовательные устройства, М., 1970; Чиликин М. Г., Общий курс электропривода, 5 изд., М., 1971.
Ю. М. Иньков.
Тиристорные электроприводы постоянного тока | Эксплуатация крановых тиристорных электроприводов
Страница 6 из 15
ПРИНЦИП РАБОТЫ И ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ ПРЕОБРАЗОВАТЕЛЕЙ ДЛЯ КРАНОВЫХ ЭЛЕКТРОПРИВОДОВ
Тиристорные преобразователи постоянного тока являются устройством, преобразующим переменное напряжение питающей сети в выпрямленное регулируемое напряжение посредством фазоимпульсного управления тиристорами. Для пояснения принципа работы преобразователя на рис. 9 приведены схема трехфазного нулевого преобразователя, подключенного на якорную систему двигателя постоянного тока М, а на рис. 10 – диаграммы изменения токов и напряжений. Питание преобразователя осуществляется от сети через трансформатор Т с напряжением на вторичных обмотках Щ-Щ или через токоограничивающий дроссель. Регулирование средних значений выпрямленного напряжения осуществляется тиристорными блоками VS1-VS3 путем изменения системой фазоимпульсного управления (СИФУ) угла включения тиристоров а или р в зависимости от режима работы.
Рис. 9. Схема трехфазного нулевого преобразователя постоянного тока
Поскольку, как видно из схемы рис. 9, аноды тиристоров соединены между собой, включаться может только тот тиристор, потенциал катода которого наибольший. Точка перехода потенциала анод-катод тиристоров через нуль определяет момент естественного включения тиристоров, от которого и отсчитывается угол включения. Преобразователь может работать в выпрямительном или в инверторном режиме. В выпрямительном режиме ток /п и напряжение Un на выходе преобразователя совпадают по направлению и двигатель потребляет из сети энергию. В инверторном режиме направления тока и напряжения противоположны и энергия от двигателя, работающего как генератор, передается в сеть. Перевод преобразователя из выпрямительного в инверторный режим осуществляется посредством увеличения угла а сверх л/2.

разность
Рис. 10. Диаграммы выходных напряжений и токов соответственно в выпрямительном и инверторном режимах:
а — диаграмма напряжения выпрямительного режима; б —_ диаграмма выходного тока выпрямительного режима; в — диаграмма выходного напряжения инверторного режима; г — диаграмма тока инверторного режима
В крановых электроприводах постоянного тока тиристорные преобразователи осуществляют питание якорных цепей двигателей и их обмоток возбуждения.
 Для крановых электроприводов до 1985 г. выпускались преобразователи типа АТРК, которые в настоящее время заменены на преобразователи типа ТПЕ. Принципы построения преобразователей обоих типов одинаковы, однако в ТПЕ использованы более совершенные конструктивные решения и они имеют по сравнению с АТРК меньшие массу и габариты. Технические характеристики преобразователей ТПЕ и АТРК приведены в табл. 1. Далее подробно рассматриваются преобразователи ТПЕ.
Для крановых электроприводов до 1985 г. выпускались преобразователи типа АТРК, которые в настоящее время заменены на преобразователи типа ТПЕ. Принципы построения преобразователей обоих типов одинаковы, однако в ТПЕ использованы более совершенные конструктивные решения и они имеют по сравнению с АТРК меньшие массу и габариты. Технические характеристики преобразователей ТПЕ и АТРК приведены в табл. 1. Далее подробно рассматриваются преобразователи ТПЕ.Тип преобразователя | Номинальное выпрямленное напряжение, В | Номинальный выпрямленный ток, А | Максимальный выпрямленный ток, А | Габариты преобразователя, мм | Масса пре- | |||
ТПЕ-100/100-460 |
| 100 | 200 | 800x750x1000 | 280 | |||
ТПЕ-200/200-460 |
| 200 | 400 | |||||
ТПЕ-400/400-460 | 460 | 400 | 800 | 800x775x1637 | 580 | |||
ТПЕ-630/630-460 |
| 630 | 1260 | 1000x775x1650 | 660 | |||
Тип преобразователя | Номинальное выпрямленное напряжение, В | Номинальный выпрямленный ток, А | Максимальный выпрямленный ток, А | Габариты преобразователя, | Масса пре- | |||
АТРК-100/230 | 230 | 100 | 200 | 800x750x1700 | 480 | |||
АТРК-100/460 | 460 | 510 | ||||||
АТРК-160/230 | 230 | 160 | 220 | 480 | ||||
АТРК-160/460 | 460 | 510 | ||||||
АТРК-250/230 | 230 | 250 | 500 | 520 | ||||
АТРК-250/460 | 460 | 600 | ||||||
АТРК-500/230 | 230 | 500 | 1000 | 2000x750x1700 | 1000 | |||
АТРК-500/500 | 460 | |||||||
СИЛОВЫЕ СХЕМЫ ПРЕОБРАЗОВАТЕЛЯ
Преобразователь включает в себя два управляемых выпрямителя: для питания якорной цепи двигателя и его обмотки возбуждения.
Выпрямитель якорных цепей выполнен по трехфазной мостовой реверсивной схеме со встречно-параллельным соединением двух выпрямительных мостов UZ1 и UZ2 (рис. 11, а), выпрямитель цепей возбуждения UZ3 построен по однофазной мостовой схеме (рис. 11,6). Охлаждение силовых тиристоров – естественное воздушное.
Мосты UZ1 и UZ2 подключены к сети быстродействующим автоматическим выключателем QF1 через токоограничивающий реактор L.
Номинальное и максимальное выпрямленное напряжение преобразователей составляет соответственно 230 и 440 В, номинальный выпрямленный ток возбуждения 15 А.
Рис. 11. Силовые схемы выпрямителя якорной цепи (а) и цепи возбуждения (б)
Выключатель QF1 защищает силовой выпрямитель от токов короткого замыкания на стороне переменного тока. На выходе выпрямителя защита осуществляется автоматическим выключателем QF2. В зависимости от номинального тока мосты имеют одну, две или три параллельные ветви соответственно на токи 200, 400 и 630 А. Управление тиристорными мостами раздельное от одной системы фазоимпуль- сного управления, при котором сигналы управления подаются только на работающую группу тиристоров. Это позволяет исключить протекание силовых токов в замкнутом контуре, образуемом тиристорными мостами, и в цепях, связывающих мосты, отсутствуют силовые дроссели.
Управление тиристорными мостами раздельное от одной системы фазоимпуль- сного управления, при котором сигналы управления подаются только на работающую группу тиристоров. Это позволяет исключить протекание силовых токов в замкнутом контуре, образуемом тиристорными мостами, и в цепях, связывающих мосты, отсутствуют силовые дроссели.
Выпрямитель возбуждения UZ3 подключен к сети через токоограничивающие резисторы R и автоматический выключатель QF3, защищающий от токов короткого замыкания. В силовой цепи установлен также предохранитель F1, осуществляющий защиту от токов перегрузки.
ФУНКЦИОНАЛЬНАЯ СХЕМА ПРЕОБРАЗОВАТЕЛЯ
Функциональная схема представлена на рис. 12 и состоит из системы управления силового выпрямителя А1 и системы управления выпрямителя возбуждения А2. Система А1 включает следующие основные функциональные узлы: VI – задатчик интенсивности; U2 – регулятор скорости, контур регулирования тока, включающий регулятор тока U3 и датчик тока UA1; U4 – датчик напряжения; U5 – логическое переключающее устройство; UA2 – датчик нуля тока; AV-M -система фазоимпульсного управления.
Рис. 12. Функциональная схема преобразователя постоянного тока
Система А2 включает узел управления U6, задатчик интенсивности U7, регулятор тока возбуждения U8 с датчиком тока UA3 и систему фазоимпульсного управления AV. Задатчик интенсивности обеспечивает разгон привода (изменение напряжения на выходе силового выпрямителя) в функции времени при скачкообразном сигнале от командоаппарата SM. Система фазоимпульсного управления AV-M предназначена для генерирования управляющих импульсов и осуществления их фазового сдвига в зависимости от значения входного управляющего сигнала. Управление тиристорными мостами, как уже было сказано, раздельное, а их переключение производится логическим переключающим устройством 1/5. Управляющий сигнал на вход AV-M формируется системой автоматического регулирования, обеспечивающей стабильность и необходимое качество регулирования во всех возможных режимах. Система автоматического регулирования включает в себя контур скорости с регулятором скорости U2 и обратной связью по напряжению от датчика напряжения U4 и контур тока с регулятором тока U3 и обратной связью по току от датчика тока UA1 с ходом от трансформатора тока ТА1. Система управления возбуждением обеспечивает увеличение частоты вращения двигателя при малых нагрузках путем ослабления поля двигателя по сигналу от датчика силового тока UA1 и стабилизацию заданного узлом управления U6 тока возбуждения при колебаниях напряжения сети и изменении сопротивления обмотки возбуждения. Система автоматического регулирования преобразователя возбуждения одноконтурная по току возбуждения с поступлением сигнала обратной связи по току от трансформатора ТА2. Для осуществления питания и синхронизации системы управления выпрямителей якорной цепи и возбуждения служит блок U9, включающий пять источников выпрямленного напряжения: 12 В – для питания интегральных микросхем; 157 В – стабилизированный источник цепей управления; 150 В – для заряда емкостей в схеме фазового сдвига и источник 7,5 В для цепей смещения логического переключающего устройства. Поскольку работа основных узлов систем управления выпрямителями якорной цепи и цепи возбуждения во многом идентична, ниже рассматривается работа отдельных узлов системы управления силовым выпрямителем.
Система управления возбуждением обеспечивает увеличение частоты вращения двигателя при малых нагрузках путем ослабления поля двигателя по сигналу от датчика силового тока UA1 и стабилизацию заданного узлом управления U6 тока возбуждения при колебаниях напряжения сети и изменении сопротивления обмотки возбуждения. Система автоматического регулирования преобразователя возбуждения одноконтурная по току возбуждения с поступлением сигнала обратной связи по току от трансформатора ТА2. Для осуществления питания и синхронизации системы управления выпрямителей якорной цепи и возбуждения служит блок U9, включающий пять источников выпрямленного напряжения: 12 В – для питания интегральных микросхем; 157 В – стабилизированный источник цепей управления; 150 В – для заряда емкостей в схеме фазового сдвига и источник 7,5 В для цепей смещения логического переключающего устройства. Поскольку работа основных узлов систем управления выпрямителями якорной цепи и цепи возбуждения во многом идентична, ниже рассматривается работа отдельных узлов системы управления силовым выпрямителем. При этом схемы приводятся в упрощенном виде, без учета корректирующих и помехозащитных устройств, подробно рассматриваемых в специальной литературе, а порядковые номера и обозначения элементов не соответствуют их обозначениям в схеме преобразователей.
При этом схемы приводятся в упрощенном виде, без учета корректирующих и помехозащитных устройств, подробно рассматриваемых в специальной литературе, а порядковые номера и обозначения элементов не соответствуют их обозначениям в схеме преобразователей.
ЗАДАТЧИК ИНТЕНСИВНОСТИ (ЗИ)
Схема задатчика интенсивности приведена на рис. 13. Она содержит два дифференциальных усилителя А1 и А2, первый из которых является усилителем входного сигнала
Рис. 13. Схема задатчика интенсивности
(резистор R3 в цепи отрицательной обратной связи), а второй – интегратором (конденсатор С1). Сигнал задания подается на инвертирующий вход усилителя А1 через резистор R2, а на неинвертирующий поступает сигнал отрицательной обратной связи через резистор R4. Время изменения выходного напряжения определяется значением входного сигнала и регулируется потенциометрами R7 и R8. Резистор R1 обеспечивает связь между входом ЗИ и узлом управления, резисторы R5 и R6 связывают усилители А1 и А2, а резистор R9 устанавливает необходимый уровень напряжения на инвертируемом входе интегратора А2. Полное время развертки входного сигнала (время интегрирования) может быть установлено от 1 до 14 с.
Полное время развертки входного сигнала (время интегрирования) может быть установлено от 1 до 14 с.
- Назад
- Вперёд
Тиристорное управление электродвигателями
РЕКЛАМА:
В этой статье мы обсудим: 1. Введение в тиристорное управление электродвигателями 2. Тиристорное управление двигателями постоянного тока 3. Тиристорное управление трехфазными асинхронными двигателями 4. Тиристорное управление трехфазным синхронным двигателем 5. Специальные Особенности 6. Преимущества и недостатки.
Введение в тиристорное управление электродвигателями : Электродвигатели применяются в очень широком диапазоне мощностей, от нескольких ватт до тысяч киловатт. Многие приложения требуют очень точной настройки положения (например, в робототехнике). Во многих приложениях оптимальная производительность и эффективность являются главной задачей. Системы привода с регулируемой скоростью (VSD) помогают оптимизировать процесс, чтобы снизить инвестиционные затраты, эксплуатационные расходы и расходы на техническое обслуживание. Энергосбережение – еще одно большое преимущество приводов с регулируемой скоростью.
Энергосбережение – еще одно большое преимущество приводов с регулируемой скоростью.
Появление тиристоров, способных выдерживать большие токи, произвело революцию в области управления электроэнергией. Тиратроны, игнитроны, ртутно-дуговые выпрямители, магнитные усилители, мотор-генераторы заменены твердотельными схемами с полупроводниковыми диодами и тиристорами. Приводы с тиристорным управлением, использующие как двигатели постоянного, так и переменного тока, находят широкое применение в промышленности в качестве приводов с регулируемой скоростью.
РЕКЛАМА:
В 1960-х годах мощность переменного тока преобразовывалась в мощность постоянного тока для прямого управления приводными двигателями с твердотельными устройствами (кремниевыми диодами высокой мощности и выпрямителями, управляемыми кремнием). Первоначально реакторы насыщения использовались в сочетании с мощными кремниевыми выпрямителями для приводов постоянного тока. В настоящее время тиристоры широко используются для преобразования переменного тока в постоянный.
Общая конфигурация моторного привода:
На рис. 3.2 показана блок-схема, иллюстрирующая управление моторным приводом. Основными составляющими являются силовой электронный преобразователь, двигатель, процессы, компьютер управления процессом и контроллер.
Требуемые характеристики моторного привода определяются технологическим процессом. Для процесса может потребоваться привод с регулируемой скоростью или сервопривод и т. д. Двигатель выбирается на основе этих требований. Силовой электронный преобразователь преобразует входной однофазный или трехфазный переменный ток в питание, подходящее для обеспечения желаемых характеристик двигателя. Компьютер управления технологическим процессом получает обратную связь от процесса относительно степени выполнения требований. Эта обратная связь может быть связана со скоростью, положением и т. д.
РЕКЛАМА:
Компьютер передает сигнал об ошибке контроллеру, который, в свою очередь, выполняет корректирующие действия. Корректирующим действием может быть, скажем, изменение угла открытия тиристоров силового электронного преобразователя. В некоторых ситуациях точность и время отклика двигателя для настройки новой скорости имеют первостепенное значение. В некоторых других ситуациях требования могут быть не столь критичны.
Корректирующим действием может быть, скажем, изменение угла открытия тиристоров силового электронного преобразователя. В некоторых ситуациях точность и время отклика двигателя для настройки новой скорости имеют первостепенное значение. В некоторых других ситуациях требования могут быть не столь критичны.
1. Полностью управляемый выпрямитель :
На рис. 3.32 (а) показана принципиальная схема последовательного двигателя постоянного тока, питаемого от однофазной сети переменного тока через полностью управляемый выпрямитель. Якорь двигателя и обмотки возбуждения имеют не только индуктивность, но и сопротивление. Поскольку выходной ток выпрямителя не является идеальным постоянным током, также играет роль индуктивность. R — сопротивление якоря, включая сопротивление возбуждения, а L — индуктивность якоря, включая сопротивление возбуждения. Во время положительного полупериода тиристоры ТН 1 и TH 2 смещены в прямом направлении и начинают проводить при ωt = α. Ток нагрузки протекает через TH 1 , двигатель и TH 2 . При ωt = π напряжения питания меняются местами.
Ток нагрузки протекает через TH 1 , двигатель и TH 2 . При ωt = π напряжения питания меняются местами.
Из-за индуктивности L тиристоры TH 1 и TH 2 продолжают проводить ток за пределами ωt = π. От ωt = π + α до ωt = 2π тиристоры TH 3 и TH 4 смещены в прямом направлении. При срабатывании ТН 3 и ТН 4 при ωt = π + α тиристоры ТН 1 и TH 2 , подвергаются обратному смещению и отключаются естественной коммутацией. Ток нагрузки передается от TH 1 и TH 2 к TH 3 и TH 4 . Этот режим работы продолжается до тех пор, пока TH 1 и TH 2 не сработают в следующем положительном полупериоде.
Квадранты работы и формы сигналов показаны на рис. 3.32 (б) и 3.32 (в). Если индуктивность L достаточно велика, ток двигателя более или менее постоянен. Значение α должно быть таким, чтобы при срабатывании тиристоров мгновенное значение переменного входного напряжения V max sin ωt больше противоЭДС E b . Это устанавливает нижний предел угла открытия α.
Это устанавливает нижний предел угла открытия α.
Среднее выходное напряжение преобразователя,
Для постоянного тока двигателя I a мы можем написать –
Поскольку ток возбуждения также равен I a , противо-ЭДС E b можно записать как K 1 I a Н, где K 1 — постоянная величина. Письменно E b как K 1 I a N мы пренебрегли остаточным магнетизмом в двигателе.
Замена значения I на из уравнения. (3.54) в уравнении (3.55), имеем-
Используя приведенное выше уравнение. (3.56) Моментно-скоростные характеристики для различных значений а можно построить, как показано на рис. 3.32 (г).
2. Полууправляемый выпрямитель :
Двигатель постоянного тока, питаемый от однофазной сети переменного тока через полууправляемый выпрямитель, показан на рис. 3.33 (а).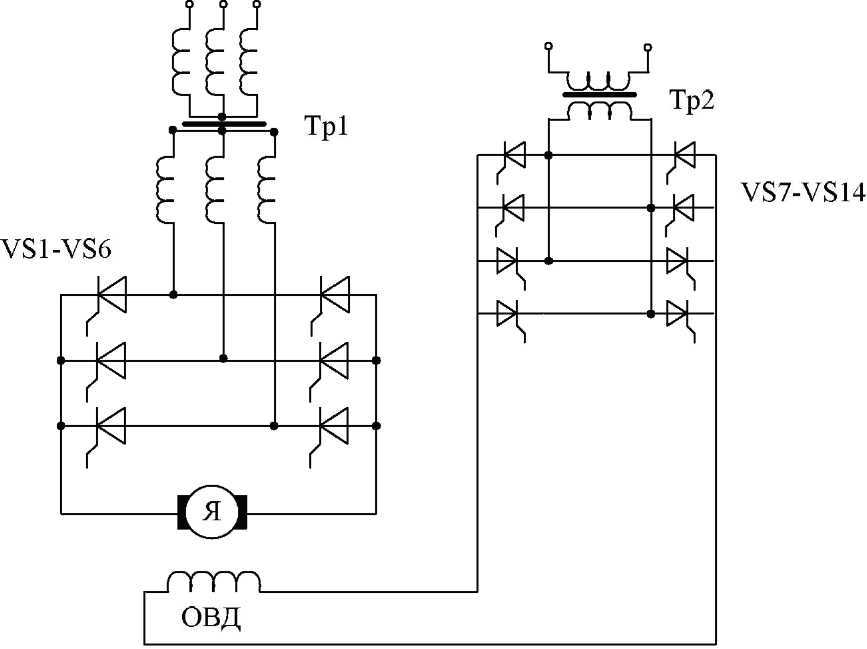 Выпрямитель имеет два тиристора ТН 1 и TH 2 и два диода D 1 и D 2 . Обратный диод D FW помогает проводить ток, когда тиристор не проводит ток. R — сопротивление якоря и возбуждения, а L — индуктивность якоря и обмоток возбуждения.
Выпрямитель имеет два тиристора ТН 1 и TH 2 и два диода D 1 и D 2 . Обратный диод D FW помогает проводить ток, когда тиристор не проводит ток. R — сопротивление якоря и возбуждения, а L — индуктивность якоря и обмоток возбуждения.
Во время положительного полупериода тиристор TH 1 срабатывает при ωt = α и начинает проводить ток. Значение α должно быть таким, чтобы V max sin α > E b . Ток протекает через TH 1 , двигатель и диод D 1 от ωt = α до ωt = π. При ωt = π входное напряжение становится отрицательным и обратный диод D FW смещен в прямом направлении. Таким образом, при ωt = π тиристор TH 1 и диод D 1 перестают проводить ток, и ток переходит на D FW .
Во время отрицательного полупериода тиристор TH 2 смещен в прямом направлении, и когда он срабатывает при ωt = π + α, обратный диод D FW перестает проводить ток, и ток передается на TH 2 – D 2 Комбинация. TH 2 и D 2 проводят от ωt = π + α к ωt = 2π. При ωt = 2π тиристор TH 2 и диод D 2 выключаются, и ток через D FW свободно протекает от ωt = 2π до ωt = 2π + α. При ωt = 2π + α тиристор TH 1 снова срабатывает и начинается следующий цикл работы. Таким образом, схема работает так: D FW , работает для 0 ≤ ωt ≤ α; TH 1 и D 1 проводят для α ≤ ωt ≤ π; Д FW проводит для π ≤ ω t ≤ π + α; и TH 2 и D 2 проводят для π + α ≤ ωt ≤ 2π.
TH 2 и D 2 проводят от ωt = π + α к ωt = 2π. При ωt = 2π тиристор TH 2 и диод D 2 выключаются, и ток через D FW свободно протекает от ωt = 2π до ωt = 2π + α. При ωt = 2π + α тиристор TH 1 снова срабатывает и начинается следующий цикл работы. Таким образом, схема работает так: D FW , работает для 0 ≤ ωt ≤ α; TH 1 и D 1 проводят для α ≤ ωt ≤ π; Д FW проводит для π ≤ ω t ≤ π + α; и TH 2 и D 2 проводят для π + α ≤ ωt ≤ 2π.
Рабочий квадрант и формы волны показаны на рис. 3,33 (б) и 3,33 (в) соответственно.
Среднее выходное напряжение полупреобразователя определяется как-
Обратная ЭДС E b может быть записана как K 1 I a N без учета остаточного магнетизма-
Подстановка значения I a из уравнения. (3.57) в приведенном выше уравнении мы имеем-
Используя приведенное выше уравнение. (3.58) построены скоростно-моментные характеристики для различных значений α, как показано на рис. 3.33 (г).
(3.58) построены скоростно-моментные характеристики для различных значений α, как показано на рис. 3.33 (г).
Во время работы двигателей постоянного тока с независимым возбуждением и двигателей постоянного тока наблюдается, что область прерывистого тока меньше в случае двигателей постоянного тока с последовательным возбуждением. Использование полупреобразователя обеспечивает непрерывный ток практически во всем рабочем диапазоне, за исключением случаев, когда момент нагрузки очень мал. Если в цепи якоря используется индуктивность, можно получить непрерывный ток якоря во всем рабочем диапазоне.
Двигатели постоянного тока серии обычно используются для приложений с постоянной выходной мощностью. Однако скоростно-моментные характеристики не соответствуют постоянной выходной мощности для заданного угла включения и, следовательно, для получения постоянной мощности во всем диапазоне скоростей приходится регулировать угол включения α. Полупреобразовательная система, благодаря своему свободному действию, помогает поддерживать непрерывный ток и, таким образом, обеспечивает лучшую производительность двигателей по сравнению с системой с полным преобразователем.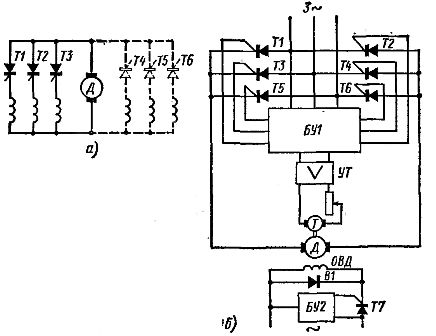 Также было замечено, что двигатель постоянного тока вместе с полупреобразователем обеспечивает лучшую производительность.
Также было замечено, что двигатель постоянного тока вместе с полупреобразователем обеспечивает лучшую производительность.
Преобразователи с фазовым управлением имеют низкий коэффициент мощности, особенно когда выходное напряжение меньше максимального, т. е. когда угол возбуждения α велик. Полупреобразователи обеспечивают лучший коэффициент мощности по сравнению с полными преобразователями, хотя улучшение незначительно.
Тиристорное управление трехфазными асинхронными двигателями :Скорость асинхронного двигателя определяется как-
Таким образом, скорость асинхронного двигателя с фиксированным числом полюсов зависит от частоты питания f и скольжения s, которое, в свою очередь, зависит от напряжения или тока, подаваемого на двигатель.
Доступны следующие методы регулирования скорости трехфазных асинхронных двигателей с использованием тиристоров:
1. Регулирование напряжения статора или регулирование постоянной частоты переменного напряжения.
2. Регулировка напряжения и частоты.
3. Контроль сопротивления ротора.
4. Контроль вторичного внешнего напряжения.
Изменение напряжения статора осуществляется с помощью регуляторов переменного тока, которые регулируют среднеквадратичное значение напряжения переменного тока, подаваемого на двигатель, путем введения тиристоров, включенных встречно-параллельно в каждую линию питания. Мощность переменной частоты получается с помощью циклопреобразователя, который напрямую преобразует переменный ток фиксированной частоты в переменный ток переменной частоты, или с помощью инвертора, который преобразует постоянный ток в переменный.
Эффективное значение внешнего сопротивления, введенного в цепь ротора, можно контролировать, подключив высокочастотный прерыватель к сопротивлению и изменяя время, в течение которого прерыватель включен в течение цикла. Статические преобразователи частоты используются для замены вспомогательных машин в системе Шербиуса. Схема Крамера также была изменена за счет использования диодного мостового выпрямителя вместо преобразователя ротора, но двигатель постоянного тока по-прежнему требуется для преобразования выпрямленной мощности скольжения в механическую энергию.
Схема Крамера также была изменена за счет использования диодного мостового выпрямителя вместо преобразователя ротора, но двигатель постоянного тока по-прежнему требуется для преобразования выпрямленной мощности скольжения в механическую энергию.
Синхронный двигатель представляет собой двигатель с постоянной скоростью и развивает крутящий момент только при синхронной скорости, которая прямо пропорциональна частоте питания. Следовательно, изменение частоты переменного тока является удобным методом управления скоростью синхронного двигателя. До появления силовых электронных устройств изменение частоты было очень сложной задачей.
Однако силовые электронные схемы обеспечивают простой метод изменения частоты. Переменный ток 50 Гц преобразуется в постоянный с помощью управляемого выпрямителя. Инвертор переменной частоты преобразует постоянный ток в переменный ток переменной частоты. Чтобы поддерживать постоянную плотность потока в двигателе, напряжение и частота должны изменяться в одном и том же отношении, чтобы соотношение напряжение/частота было постоянным.
На рис. 3.52 показана система регулирования скорости синхронного двигателя. Трехфазный переменный ток 50 Гц выпрямляется управляемым трехфазным выпрямителем. Фильтр удаляет гармоники с выхода выпрямителя. Инвертор переменной частоты подает переменный ток переменной частоты на синхронный двигатель. Таким образом, можно управлять скоростью синхронного двигателя. Выход постоянного тока фильтра также используется для возбуждения обмотки ротора.
В низкоскоростных приложениях большой мощности также можно использовать циклопреобразователь для преобразования переменного тока с частотой 50 Гц в переменный ток переменной частоты. Циклоконвертер выполняет преобразование без промежуточного звена постоянного тока. Максимальная выходная частота ограничена примерно одной третью частоты, поэтому выходная волна имеет низкое содержание гармоник.
Инверторный привод с коммутацией нагрузки для синхронного двигателя:
Для двигателей больших размеров (двигатели с выходной мощностью более 750 кВт) синхронный двигатель с коммутируемой нагрузкой становится конкурентоспособным с асинхронным двигателем в требованиях к регулируемой скорости. На рис. 3.53 показана схема инверторного привода с коммутацией нагрузки. Трехфазное питание переменного тока выпрямляется трехфазным мостовым преобразователем с фазовым управлением. Источник постоянного тока проходит через фильтр для улучшения формы волны, а затем подается на инвертор с коммутацией нагрузки.
На рис. 3.53 показана схема инверторного привода с коммутацией нагрузки. Трехфазное питание переменного тока выпрямляется трехфазным мостовым преобразователем с фазовым управлением. Источник постоянного тока проходит через фильтр для улучшения формы волны, а затем подается на инвертор с коммутацией нагрузки.
Каждая фаза синхронного двигателя представлена ЭДС внутренней индукции последовательно с индуктивностью обмотки статора. Частота и фаза токов статора синхронизированы с положением ротора. Коммутация тока в инверторе с коммутацией нагрузки для подачи токов в фазы статора в соответствующей последовательности обеспечивается ЭДС статора. Наличие трехфазной ЭДС индукции в обмотке статора двигателя вызывает коммутацию тиристора. Управление углом открытия преобразователя управляет его постоянным выходным напряжением и, следовательно, током.
Полная схема контроллера инверторного привода с коммутацией нагрузки показана на рис. 3.54. Входное напряжение статора синхронного двигателя измеряется для расчета положения поля ротора как функции времени. Измеренное напряжение выпрямляется, чтобы обеспечить сигнал постоянного тока, пропорциональный мгновенной скорости синхронного двигателя. Время выключения T off , доступное для тиристора в инверторе, поддерживается постоянным.
Измеренное напряжение выпрямляется, чтобы обеспечить сигнал постоянного тока, пропорциональный мгновенной скорости синхронного двигателя. Время выключения T off , доступное для тиристора в инверторе, поддерживается постоянным.
Поддержание тока возбуждения и выключение T , фактическая скорость сравнивается с эталонной скоростью. Сигнал ошибки усиливается, чтобы обеспечить ссылку l d . Если фактический ток I d меньше опорного, выпрямитель увеличивает напряжение, подаваемое на инвертор, тем самым увеличивая I d и крутящий момент двигателя. На основе тока I d и измеренного напряжения подаются импульсы зажигания на затворы тиристоров инвертора, чтобы поддерживать T выключенным постоянным.
Особенности двигателей с тиристорным приводом: Наиболее часто используемые двигатели постоянного тока для тиристорного привода представляют собой двигатели постоянного тока с независимым и последовательным возбуждением. Тиристорные приводные двигатели обычно отличаются конструкцией от обычных двигателей постоянного тока. Прежде чем обсуждать особенности, встроенные в тиристорные приводные двигатели, необходимо обсудить влияние тиристорного источника питания на работу двигателя постоянного тока.
Тиристорные приводные двигатели обычно отличаются конструкцией от обычных двигателей постоянного тока. Прежде чем обсуждать особенности, встроенные в тиристорные приводные двигатели, необходимо обсудить влияние тиристорного источника питания на работу двигателя постоянного тока.
Влияние тиристорного источника питания на характеристики двигателя постоянного тока :
1. Выходное напряжение тиристорного преобразователя состоит из постоянной составляющей и гармонических составляющих переменного тока.
2. Выходное напряжение может изменяться очень быстро по сравнению с напряжением двигателя-генератора из-за отсутствия постоянных времени возбуждения, связанных с генератором.
3. При неисправности тиристора при работе в инверторном режиме может возникнуть аномально высокое значение тока якоря.
4. Величина гармоник уменьшается с увеличением частоты гармоники для всех преобразователей. Величина гармоник увеличивается по мере увеличения угла открытия и уменьшения постоянного напряжения для всех двунаправленных преобразователей. Чем выше индуктивность якоря, тем меньше будут гармонические токи.
Чем выше индуктивность якоря, тем меньше будут гармонические токи.
5. Крутящий момент создается постоянной составляющей тока, тогда как нагрев создается эффективным (или среднеквадратичным) значением тока. Коэффициент формы (отношение действующего значения к среднему значению) для однополупериодных трехфазных тиристоров можно принять равным 1,2, а для двухполупериодных трехфазных тиристоров – 1,1. Это увеличивает электрические потери и, следовательно, нагрев трехфазных мостовых преобразователей больше на 5—7 %, а трехфазных полумостовых преобразователей — на 15—20 %.
6. На коммутационную способность серьезно влияет наличие гармонических токов. Пиковое значение тока увеличивается, межполюсный поток уменьшается по величине, и между межполюсным током и потоком возникает временная задержка из-за вихревых токов, генерируемых на железном пути межполюсного потока.
Другими эффектами тиристорного питания на работу двигателя являются нагрев межполюсной обмотки, насыщение межполюсного магнитопровода, напряжение трансформатора на щетках и повышение напряжения на участке коммутатора.
Особенности тиристорных двигателей :
Двигатели постоянного тока с тиристорным приводом разработаны со следующими особенностями для улучшения их характеристик:
1. Двигатели постоянного тока с тиристорным приводом изготавливаются с якорем большего диаметра и полюсами большего размера уменьшенной высоты.
2. Коллекторы увеличены, чтобы обеспечить дополнительную изоляцию, чтобы выдерживать большие и быстрые колебания напряжения.
3. Ярма, а также главные и коммутирующие полюса ламинированы для снижения воздействия вихревых токов.
4. Для улучшения отклика используется малоинерционная арматура.
5. Компенсационные обмотки используются в больших двигателях для уменьшения эффекта реакции якоря.
6. Разрезные щетки хорошего коммутационного качества используются для снижения влияния трансформаторного напряжения на коммутируемые катушки.
7. Использование пластинчатого ярма вместо цельного в большей степени улучшает коммутацию.
8. Использование большого количества коллекторных шин снижает напряжение между сегментами коммутатора и улучшает коммутацию.
9. Использование восьмиугольной, а не круглой формы для рамы позволяет разместить больше материала и дает более высокий рейтинг для того же размера рамы.
10. Плотность тока, используемая для якоря и межполюсной обмотки, снижена по сравнению с обычными двигателями постоянного тока того же типоразмера и номинала, чтобы уменьшить влияние нагрева якоря и межполюсных полюсов.
11. Улучшенный класс изоляции (материалы класса F в качестве стандартной изоляции) используется для обеспечения более высокого повышения температуры и рассеивания большего количества потерь от данного корпуса.
12. Соотношение дуга полюса/шаг полюса уменьшено, чтобы уменьшить отношение коммутационной зоны к нейтральной зоне.
13. Увеличена индуктивность якоря для уменьшения пульсаций тока. Это также может увеличить реактивное напряжение. Количество витков на катушку якоря поддерживается на минимальном уровне, поскольку реактивное напряжение пропорционально квадрату витков на катушку. Использование фиктивных катушек исключено.
Использование фиктивных катушек исключено.
14. Принудительное охлаждение вспомогательным двигателем переменного тока широко используется для улучшения охлаждения двигателя на пониженных скоростях.
15. Особое внимание следует уделить точному расположению щеток, полюсов и коллекторов.
Преимущества и недостатки тиристорного управления:
Тиристорное управление имеет следующие преимущества и недостатки:
Преимущества:
1. Реакция устройства управления быстрее, так как устраняется временная задержка, вносимая индуктивностями поля генератора и якоря.
2. Благодаря низкому падению напряжения на тиристоре эффективность системы управления высока.
3. Устройство управления меньше по размеру, легче по весу, дешевле по стоимости, занимает меньше места и требует минимального обслуживания.
4. Простое и надежное управление.
Недостатки:
1. Из-за более высокой пульсации на выходе преобразователя возникают серьезные проблемы с нагревом и коммутацией двигателя.
2. Из-за коммутационного действия тиристоров и несинусоидальности тока больше вероятность помех в сетях связи.
Во всех приводных системах с регулируемой скоростью силовой электронный преобразователь действует как интерфейс, который принимает электроэнергию от существующего источника и преобразует ее контролируемым образом в подходящую форму, совместимую с конкретной нагрузкой или процессом, для которого она используется. Основными источниками электроэнергии являются: Однофазный или трехфазный переменный ток 50 Гц от коммунальных сетей и постоянный ток от аккумуляторных батарей или солнечных батарей. Требуются четыре основные формы преобразования энергии: переменный ток в постоянный, постоянный в постоянный, постоянный в переменный и переменный в переменный.
Современные преобразователи компактны, дешевы, надежны, долговечны, гибки и полностью управляемы. Они также нуждаются в меньшем обслуживании. Они подходят для всех четырех основных форм преобразования энергии, упомянутых выше, через выпрямители (переменный/постоянный ток), прерыватели (постоянный/постоянный ток), инверторы (постоянный/переменный ток) и циклопреобразователи или регуляторы переменного тока (переменный/переменный ток).
Для управления двигателем постоянного тока регулируемая мощность постоянного тока от источника переменного тока постоянного напряжения получается с помощью управляемых выпрямителей (обычно называемых преобразователями) с использованием тиристоров и диодов. Управление постоянным напряжением достигается путем изменения фазового угла, при котором тиристоры запускаются, относительно формы волны приложенного переменного напряжения. Эта схема управления известна как фазовое управление.
В другой системе управления, известной как управление интегральным циклом, ток от источника переменного тока стробируется в течение нескольких полных циклов, а затем гасится в течение следующих нескольких циклов, причем процесс повторяется непрерывно. Управление осуществляется путем регулировки соотношения длительности включения и выключения. Этот метод подходит для управления двигателями постоянного тока мощностью в несколько кВт.
Преобразователи с фазовым управлением просты в эксплуатации и дешевле, так как не требуют дополнительных схем для процесса коммутации. В таких преобразователях достигается естественная коммутация, т. е. при включении входящего тиристора он сразу же смещает в обратном направлении выходящий тиристор и отключает его.
В таких преобразователях достигается естественная коммутация, т. е. при включении входящего тиристора он сразу же смещает в обратном направлении выходящий тиристор и отключает его.
Методы фазового управления и управления интегральным циклом также применимы для двигателей переменного тока, в которых не требуется схема преобразователя.
Управление двигателями постоянного тока, питающимися от источника постоянного тока, осуществляется с помощью тиристорной схемы переключения, называемой прерывателем. В схемах прерывателя управление средним напряжением достигается за счет изменения соотношения продолжительности включения и выключения, в течение которого на двигатель подается напряжение питания постоянного тока. Это обеспечивает эффективное и бесступенчатое управление двигателями постоянного тока.
Двигатель также может работать в режиме рекуперативного торможения. Вместо схем преобразователя можно использовать неуправляемый выпрямитель, обеспечивающий постоянное постоянное напряжение, за которым следует прерыватель, обеспечивающий переменное среднее постоянное выходное напряжение. Контроллер прерывателя требует принудительной коммутации тиристора.
Контроллер прерывателя требует принудительной коммутации тиристора.
Для управления двигателями переменного тока, питающимися от источника постоянного тока, используются инверторы на основе тиристоров, транзисторов или полевых МОП-транзисторов. Такие схемы переключения передают энергию от источника постоянного тока к нагрузке переменного тока с переменной частотой и/или переменным напряжением. Из-за операции переключения формы сигналов переменного напряжения ступенчатые, гармоники которых отфильтровываются. Поскольку источником питания обычно является переменный ток, полная схема получения мощности с переменным напряжением и частотой включает использование как инвертора, так и преобразователя.
Циклоконвертер представляет собой блок управления для обеспечения переменного напряжения и мощности непосредственно от источника фиксированной частоты без необходимости использования промежуточного каскада постоянного тока. Механизм управления напряжением и частотой представляет собой комбинацию механизмов, используемых в преобразователях с фазовым управлением и инверторах с импульсной модуляцией.
Циклопреобразователи, несмотря на их привлекательность для прямого преобразования переменного тока в переменный, имеют определенные недостатки, из-за которых они не стали популярными. Вот некоторые из этих недостатков: циклоконвертеры могут генерировать только субчастотный выходной сигнал; они производят выходной сигнал с большим содержанием гармоник и имеют низкий входной коэффициент мощности. Циклопреобразователи используются для тихоходных приводов и для управления линейными двигателями в высокоскоростных транспортных системах.
Главная ››
Статья о тиристоре+электро+приводе из The Free Dictionary
Тиристор+электро+привод | Статья о тиристоре+электро+приводе от The Free DictionaryТиристор+электр+привод | Статья про тиристор+электро+привод от The Free Dictionary
Слово, не найденное в Словаре и Энциклопедии.
Пожалуйста, попробуйте слова отдельно:
тиристор электрический водить машину
Некоторые статьи, соответствующие вашему запросу:
Не можете найти то, что ищете? Попробуйте выполнить поиск по сайту Google или помогите нам улучшить его, отправив свое определение.