Тиристорный электропривод – » :
alexxlab | 18.11.2019 | 0 | Разное
Тиристорный электропривод – это… Что такое Тиристорный электропривод?
- Тиристорный электропривод
- В Т. э. переменного тока в качестве ИД чаще всего применяют асинхронные и синхронные трёхфазные электродвигатели, режим работы которых можно регулировать изменением частоты и амплитуды напряжения, подводимого к статору, а в случае синхронного двигателя — также изменением тока в обмотке возбуждения. В Т. э. этого типа, питающихся от источника переменного тока, регулирующим ПУ обычно служит тиристорный Преобразователь частоты, выполненный либо с промежуточным звеном постоянного или переменного тока, либо по схеме с непосредственной связью. При питании таких Т. э. от источника постоянного тока в качестве ПУ используют автономный Инвертор. Реверсирование ИД (см. Реверсивный электропривод) в Т. э. переменного тока осуществляют, изменяя последовательность чередования фаз напряжения, подводимого к статору.
В Т. э. постоянного тока применяют двигатели постоянного тока с последовательным, параллельным, смешанным или независимым возбуждением, регулирование режимов работы которых можно производить по цепи обмотки якоря или обмотки возбуждения. В Т. э. этого типа, питающихся от источника переменного тока, ПУ служит тиристорный Выпрямитель тока.
Т. э. находят применение в различных отраслях промышленности и на транспорте. Мощность Т. э. составляет (в зависимости от их назначения) от нескольких
Лит.: Ривкин Г. А., Преобразовательные устройства, М., 1970; Чиликин М. Г., Общий курс электропривода, 5 изд., М., 1971.
Ю. М. Иньков.
Большая советская энциклопедия. — М.: Советская энциклопедия. 1969—1978.
- Тиристор
- Тиритака
Смотреть что такое “Тиристорный электропривод” в других словарях:
тиристорный электропривод — Электропривод, содержащий тиристорный преобразователь электроэнергии. [ГОСТ Р 50369 92] Тематики электропривод EN thyristor drive DE Thyristorantrieb … Справочник технического переводчика
тиристорный электропривод — 60 тиристорный электропривод: Электропривод, содержащий тиристорный преобразователь электроэнергии Источник: ГОСТ Р 50369 92: Электроприводы. Термины и определения оригинал документа … Словарь-справочник терминов нормативно-технической документации
ТИРИСТОРНЫЙ ПРЕОБРАЗОВАТЕЛЬ – ДВИГАТЕЛЬ — система ТП Д, электропривод, в к ром двигатель пост. тока получает питание от тиристорного преобразователя перем. тока в постоянный. Позволяет регулировать угловую скорость двигателя, вращающий момент и др. параметры. Применяется в осн. совместно … Большой энциклопедический политехнический словарь
тиристорный — см. тиристор; ая, ое. Тири/сторный электропривод. Т ое устройство. Т ые преобразователи … Словарь многих выражений
ГОСТ Р 50369-92: Электроприводы. Термины и определения — Терминология ГОСТ Р 50369 92: Электроприводы. Термины и определения оригинал документа: 3 (электро) двигатель (электропривода): Электромеханический преобразователь, предназначенный для преобразования электрической энергии в механическую.… … Словарь-справочник терминов нормативно-технической документации
Тиристор — (от греч. thýra дверь, вход и англ. resistor Резистор полупроводниковый прибор, выполненный на основе монокристалла полупроводника (См. Полупроводники) с четырёхслойной структурой р n p n типа, обладающий свойствами вентиля электрического … Большая советская энциклопедия
Протон-Электротекс — Тип ЗАО Год основания 1996 Расположение Орел, Россия Отрасль Силовая Электроника … Википедия
КТЭ — Конфедерация трудящихся Эквадора объединение профсоюзов организация, Эквадор КТЭ компьютерно техническая экспертиза комп., техн. Источник: http://www.crime research.ru/library/Rossinskay.html КТЭ компьютер технической эксплуатации … Словарь сокращений и аббревиатур
Электрический привод — (сокращённо электропривод) это электромеханическая система для приведения в движение исполнительных механизмов рабочих машин и управления этим движением в целях осуществления технологического процесса. Современный электропривод … … Википедия
Электротранспорт — У этого термина существуют и другие значения, см. Электротранспорт (значения). Электротранспорт вид транспорта, использующий в качестве источника энергии электричество, а в качестве привода тяговый электродвигатель. Его основными… … Википедия
Книги
- Автоматизированный электропривод, Геннадий Симаков. В учебном пособии изложены вопросы расчета систем автоматизированного электропривода. Рассмотрены тиристорный и транзисторный электропривод постоянного тока, атакже транзисторный асинхронный… Подробнее Купить за 165 руб электронная книга
dic.academic.ru
16.6. Тиристорное управление электроприводом
О сновными
факторами, обусловившими быстрое
развитие тиристорного электропривода,
являются следующие: высокий КПД
тиристорного преобразователя (0,95—0,97),
относительно малые габариты, масса и
инерционность тиристоров, незначительная
мощность устройств управления.
сновными
факторами, обусловившими быстрое
развитие тиристорного электропривода,
являются следующие: высокий КПД
тиристорного преобразователя (0,95—0,97),
относительно малые габариты, масса и
инерционность тиристоров, незначительная
мощность устройств управления.
Использование тиристоров и соответствующих систем управления позволяет получать все требуемые регулировочные характеристикии динамические режимы двигателей как переменного, так и постоянного тока.
Тиристорный электропривод переменного тока. Для регулирования частоты вращения асинхронного двигателя тиристоры включаются в цепь статора или ротора. В первом случае с их помощью можно регулировать амплитуду (фазное регулирование) или частоту (частотное регулирование) синусоидального напряжения на обмотках статора и, следовательно, вращающий момент на валу двигателя (14.35). Во втором случае можно изменять активное сопротивление цепи ротора и таким образом (рис. 14.25) регулировать его частоту вращения. На рис. 16.9 приведена схема преобразователя (регулятора) переменного напряжения на обмотках статора асинхронного двигателя с двумя встречно-параллельными тиристорами в каждой фазе. Устройство управления синхронно открывает тиристоры в порядке чередования фаз. Изменяя момент времени включения тиристоров (рис. 10.17), можно регулировать амплитуду напряжения основной гармоники. Выключение тиристоров осуществляется автоматически при изменении полярности напряжения соответствующей фазы. Такой режим называется естественной коммутацией.
И скусственной
коммутациейназывается
выключение тиристора посредством
подключения к его выводам какого-либо
источника энергии, создающего в нем ток
обратного направления. Примером может
служить
скусственной
коммутациейназывается
выключение тиристора посредством
подключения к его выводам какого-либо
источника энергии, создающего в нем ток
обратного направления. Примером может
служить
Пусть первоначально рабочий тиристор Т открыт, а вспомогательный Твс закрыт. В это время конденсатор С заряжается через резистор г2 так, как показано на рис. 16.10. Подадим теперь на управляющий электрод вспомогательного тиристора Твс отпирающий сигнал из устройства управления. Вспомогательный тиристор включится, и конденсатор начнет разряжаться через него и рабочий тиристор. Так как при этом разрядный ток конденсатора направлен навстречу прямому току рабочего тиристора, то последний выключается. После этого конденсатор перезаряжается через резистор r 1 и открытый вспомогательный тиристор.
Чтобы вновь включить рабочий тиристор, на его управляющий электрод надо подать сигнал из устройства управления. При этом конденсатор своим разрядным током выключает вспомогательный тиристор, а сам конденсатор перезаряжается, возвращаясь к состоянию, показанному на рисунке.
Следующий цикл начинается с подачи сигнала из устройства управления на управляющий электрод вспомогательного тиристора.
Э
 квивалентное
сопротивление цепи ротора зависит от
отношения интервалов времени открытого
и закрытого состояний рабочего тиристора.
Регулируя это отношение, можно регулировать
среднее значение тока ротора и,
следовательно, момент, развиваемый
асинхронным двигателем.
квивалентное
сопротивление цепи ротора зависит от
отношения интервалов времени открытого
и закрытого состояний рабочего тиристора.
Регулируя это отношение, можно регулировать
среднее значение тока ротора и,
следовательно, момент, развиваемый
асинхронным двигателем.
Одним из наиболее перспективных способов регулирования частоты вращения асинхронных двигателей является изменение частоты напряжения на обмотках статора. Для этой цели широко используются тиристорные автономные инверторы, т. е. устройства преобразования постоянного напряжения в переменное с любым числом фаз.
Рассмотрим простейшую схему однофазного автономного инвертора (рис. 16.11), в которой источник постоянного напряжения Е соединен со средней точкой первичной обмотки трансформатора. Когда тиристор T1 включается сигналом блока управления, а тиристор Т2 закрыт, то источник постоянного напряжения Е подключается к левой половине первичной обмотки трансформатора. Ток этой части •первичной обмотки возбуждает магнитный поток в магнитопроводе трансформатора. При этом во вторичной обмотке трансформатора индуктируется ЭДС, а конденсатор С заряжается, как показано на рисунке.
Если управляющий сигнал включает тиристор Т2, то перезарядка конденсатора С закрывает тиристор T1 аналогично рис. 16.10, а источник постоянного напряжения Е подключается к правой половине первичной обмотки. В магнитопроводе возбуждается магнитный поток противоположного направления, чему соответствует и изменение направления ЭДС, индуктируемой во вторичной обмотке ω2. Частота переменного напряжения, получаемого от инвертора, определяется частотой генератора управляющих сигналов, включающих поочередно тиристоры.
Описанный инвертор может быть использован для плавной регулировки частоты вращения однофазных и двухфазных асинхронных двигателей (см. § 14.18).
Инвертирование постоянного напряжения в трехфазную или многофазную систему напряжений осуществляется аналогично. Обычно в инверторе вместо источника постоянного напряжения Е используется выпрямленное напряжение сети переменного тока. Если для этой цели, так же как и для инвертирования, использовать тиристоры, то выпрямленное напряжение можно регулировать в широких пределах (см. рис. 10.17). Это дает дополнительные возможности для управления асинхронным двигателем.
Устройства, сочетающие в себе тиристорные выпрямители и тиристорные инверторы, принято называть шириапорными преобразователями. В электроприводе иногда используют и более сложные тиристорные преобразователи, например тиристорные выпрямитель — инвертор — выпрямитель.
Применение различных способов тиристорного управления позволяет плавно и экономично регулировать частоту вращения асинхронных двигателей в диапазоне до 50 : 1 и выше.
Тиристорный электропривод постоянного тока. При необходимости регулирования частоты вращения двигателя постоянного тока и получения специальных характеристик в настоящее время широко используются тиристорные преобразователи. С их помощью двигатели постоянного тока можно подключить к сети переменного тока.
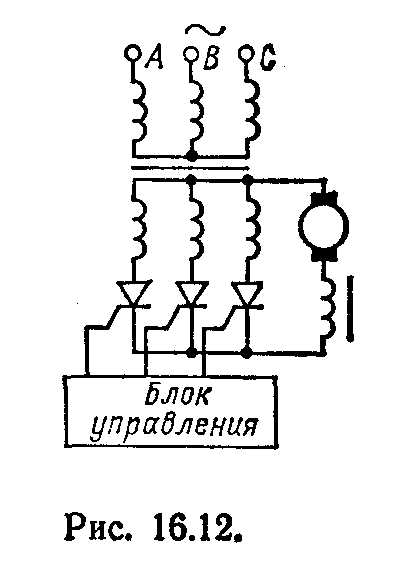
Одна из простейших схем включения двигателя постоянного тока в трехфазную цепь переменного тока приведена на рис. 16.12. Управляющее устройство синхронно включает тиристоры в порядке чередования фаз в положительные полупериоды фазных напряжений (рис. 10.17). В отрицательные полупериоды фазных напряжений происходит естественная коммутация, и тиристоры соответствующих фаз закрываются.
Среднее значение выпрямленного напряжения трех фаз равно напряжению на якоре двигателя постоянного тока (10.10):
где α — угол запаздывания включения тиристоров.
Изменяя угол запаздывания с помощью блока управления, можно изменять постоянное напряжение на якоре двигателя, т. е. постоянный ток в цепи якоря Iя. В свою очередь это приводит к изменению вращающего момента на валу двигателя (13.2).
Индуктивная катушка в цепи якоря служит для уменьшения пульсаций тока.
studfiles.net
Тиристорные электроприводы постоянного тока | Эксплуатация крановых тиристорных электроприводов
Страница 6 из 15
ПРИНЦИП РАБОТЫ И ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ ПРЕОБРАЗОВАТЕЛЕЙ ДЛЯ КРАНОВЫХ ЭЛЕКТРОПРИВОДОВ
Тиристорные преобразователи постоянного тока являются устройством, преобразующим переменное напряжение питающей сети в выпрямленное регулируемое напряжение посредством фазоимпульсного управления тиристорами. Для пояснения принципа работы преобразователя на рис. 9 приведены схема трехфазного нулевого преобразователя, подключенного на якорную систему двигателя постоянного тока М, а на рис. 10 – диаграммы изменения токов и напряжений. Питание преобразователя осуществляется от сети через трансформатор Т с напряжением на вторичных обмотках Щ-Щ или через токоограничивающий дроссель. Регулирование средних значений выпрямленного напряжения осуществляется тиристорными блоками VS1-VS3 путем изменения системой фазоимпульсного управления (СИФУ) угла включения тиристоров а или р в зависимости от режима работы. Тиристор переводится в проводящее состояние при положительном потенциале между анодом и катодом импульса управления на его базу.
Рис. 9. Схема трехфазного нулевого преобразователя постоянного тока
Поскольку, как видно из схемы рис. 9, аноды тиристоров соединены между собой, включаться может только тот тиристор, потенциал катода которого наибольший. Точка перехода потенциала анод-катод тиристоров через нуль определяет момент естественного включения тиристоров, от которого и отсчитывается угол включения. Преобразователь может работать в выпрямительном или в инверторном режиме. В выпрямительном режиме ток /п и напряжение Un на выходе преобразователя совпадают по направлению и двигатель потребляет из сети энергию. В инверторном режиме направления тока и напряжения противоположны и энергия от двигателя, работающего как генератор, передается в сеть. Перевод преобразователя из выпрямительного в инверторный режим осуществляется посредством увеличения угла а сверх л/2. При этом
разность
Рис. 10. Диаграммы выходных напряжений и токов соответственно в выпрямительном и инверторном режимах:
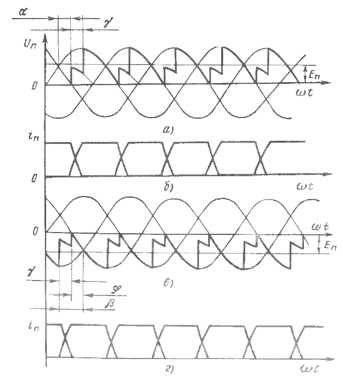
а — диаграмма напряжения выпрямительного режима; б —_ диаграмма выходного тока выпрямительного режима; в — диаграмма выходного напряжения инверторного режима; г — диаграмма тока инверторного режима
Для обеспечения режима инвертирования необходимо, чтобы закрывающийся тиристор успел восстановить свои запирающие свойства в течение времени приложения к нему отрицательного напряжения, т.е. в пределах угла ф (рис. 10, в). В противном случае возможно опрокидывание преобразователя, приводящее к протеканию аварийного тока, так как ЭДС электродвигателя и напряжение питания совпадают по направлению. Угол у на рис. 10, в, г соответствует промежутку времени, в течение которого ток протекает по двум тиристорам: вступающему в работу и выходящему из нее. Этот угол называется углом коммутации.
В крановых электроприводах постоянного тока тиристорные преобразователи осуществляют питание якорных цепей двигателей и их обмоток возбуждения. Для крановых электроприводов до 1985 г. выпускались преобразователи типа АТРК, которые в настоящее время заменены на преобразователи типа ТПЕ. Принципы построения преобразователей обоих типов одинаковы, однако в ТПЕ использованы более совершенные конструктивные решения и они имеют по сравнению с АТРК меньшие массу и габариты. Технические характеристики преобразователей ТПЕ и АТРК приведены в табл. 1. Далее подробно рассматриваются преобразователи ТПЕ.
Таблица 1. Технические данные тиристорных преобразователей типа ТПЕ и АТРК
Тип преобразователя |
Номинальное выпрямленное напряжение, В |
Номинальный выпрямленный ток, А |
Максимальный выпрямленный ток, А |
Габариты преобразователя, мм |
Масса пре- |
|||
ТПЕ-100/100-460 |
|
100 |
200 |
800x750x1000 |
280 |
|||
ТПЕ-200/200-460 |
|
200 |
400 |
|||||
ТПЕ-400/400-460 |
460 |
400 |
800 |
800x775x1637 |
580 |
|||
ТПЕ-630/630-460 |
|
630 |
1260 |
1000x775x1650 |
660 |
|||
Тип преобразователя |
Номинальное выпрямленное напряжение, В |
Номинальный выпрямленный ток, А |
Максимальный выпрямленный ток, А |
Габариты преобразователя, |
Масса пре- |
|||
АТРК-100/230 |
230 |
100 |
200 |
800x750x1700 |
480 |
|||
АТРК-100/460 |
460 |
510 |
||||||
АТРК-160/230 |
230 |
160 |
220 |
480 |
||||
АТРК-160/460 |
460 |
510 |
||||||
АТРК-250/230 |
230 |
250 |
500 |
520 |
||||
АТРК-250/460 |
460 |
600 |
||||||
АТРК-500/230 |
230 |
500 |
1000 |
2000x750x1700 |
1000 |
|||
АТРК-500/500 |
460 |
|||||||
СИЛОВЫЕ СХЕМЫ ПРЕОБРАЗОВАТЕЛЯ
Преобразователь включает в себя два управляемых выпрямителя: для питания якорной цепи двигателя и его обмотки возбуждения.
Выпрямитель якорных цепей выполнен по трехфазной мостовой реверсивной схеме со встречно-параллельным соединением двух выпрямительных мостов UZ1 и UZ2 (рис. 11, а), выпрямитель цепей возбуждения UZ3 построен по однофазной мостовой схеме (рис. 11,6). Охлаждение силовых тиристоров – естественное воздушное.
Мосты UZ1 и UZ2 подключены к сети быстродействующим автоматическим выключателем QF1 через токоограничивающий реактор L.
Номинальное и максимальное выпрямленное напряжение преобразователей составляет соответственно 230 и 440 В, номинальный выпрямленный ток возбуждения 15 А.
Рис. 11. Силовые схемы выпрямителя якорной цепи (а) и цепи возбуждения (б)
Выключатель QF1 защищает силовой выпрямитель от токов короткого замыкания на стороне переменного тока. На выходе выпрямителя защита осуществляется автоматическим выключателем QF2. В зависимости от номинального тока мосты имеют одну, две или три параллельные ветви соответственно на токи 200, 400 и 630 А. Управление тиристорными мостами раздельное от одной системы фазоимпуль- сного управления, при котором сигналы управления подаются только на работающую группу тиристоров. Это позволяет исключить протекание силовых токов в замкнутом контуре, образуемом тиристорными мостами, и в цепях, связывающих мосты, отсутствуют силовые дроссели.
Выпрямитель возбуждения UZ3 подключен к сети через токоограничивающие резисторы R и автоматический выключатель QF3, защищающий от токов короткого замыкания. В силовой цепи установлен также предохранитель F1, осуществляющий защиту от токов перегрузки.
ФУНКЦИОНАЛЬНАЯ СХЕМА ПРЕОБРАЗОВАТЕЛЯ
Функциональная схема представлена на рис. 12 и состоит из системы управления силового выпрямителя А1 и системы управления выпрямителя возбуждения А2. Система А1 включает следующие основные функциональные узлы: VI – задатчик интенсивности; U2 – регулятор скорости, контур регулирования тока, включающий регулятор тока U3 и датчик тока UA1; U4 – датчик напряжения; U5 – логическое переключающее устройство; UA2 – датчик нуля тока; AV-M -система фазоимпульсного управления.
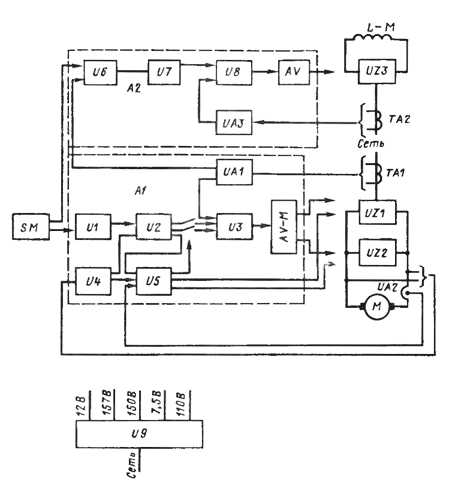
Рис. 12. Функциональная схема преобразователя постоянного тока
Система А2 включает узел управления U6, задатчик интенсивности U7, регулятор тока возбуждения U8 с датчиком тока UA3 и систему фазоимпульсного управления AV. Задатчик интенсивности обеспечивает разгон привода (изменение напряжения на выходе силового выпрямителя) в функции времени при скачкообразном сигнале от командоаппарата SM. Система фазоимпульсного управления AV-M предназначена для генерирования управляющих импульсов и осуществления их фазового сдвига в зависимости от значения входного управляющего сигнала. Управление тиристорными мостами, как уже было сказано, раздельное, а их переключение производится логическим переключающим устройством 1/5. Управляющий сигнал на вход AV-M формируется системой автоматического регулирования, обеспечивающей стабильность и необходимое качество регулирования во всех возможных режимах. Система автоматического регулирования включает в себя контур скорости с регулятором скорости U2 и обратной связью по напряжению от датчика напряжения U4 и контур тока с регулятором тока U3 и обратной связью по току от датчика тока UA1 с ходом от трансформатора тока ТА1. Система управления возбуждением обеспечивает увеличение частоты вращения двигателя при малых нагрузках путем ослабления поля двигателя по сигналу от датчика силового тока UA1 и стабилизацию заданного узлом управления U6 тока возбуждения при колебаниях напряжения сети и изменении сопротивления обмотки возбуждения. Система автоматического регулирования преобразователя возбуждения одноконтурная по току возбуждения с поступлением сигнала обратной связи по току от трансформатора ТА2. Для осуществления питания и синхронизации системы управления выпрямителей якорной цепи и возбуждения служит блок U9, включающий пять источников выпрямленного напряжения: 12 В – для питания интегральных микросхем; 157 В – стабилизированный источник цепей управления; 150 В – для заряда емкостей в схеме фазового сдвига и источник 7,5 В для цепей смещения логического переключающего устройства. Поскольку работа основных узлов систем управления выпрямителями якорной цепи и цепи возбуждения во многом идентична, ниже рассматривается работа отдельных узлов системы управления силовым выпрямителем. При этом схемы приводятся в упрощенном виде, без учета корректирующих и помехозащитных устройств, подробно рассматриваемых в специальной литературе, а порядковые номера и обозначения элементов не соответствуют их обозначениям в схеме преобразователей.
ЗАДАТЧИК ИНТЕНСИВНОСТИ (ЗИ)
Схема задатчика интенсивности приведена на рис. 13. Она содержит два дифференциальных усилителя А1 и А2, первый из которых является усилителем входного сигнала
Рис. 13. Схема задатчика интенсивности
(резистор R3 в цепи отрицательной обратной связи), а второй – интегратором (конденсатор С1). Сигнал задания подается на инвертирующий вход усилителя А1 через резистор R2, а на неинвертирующий поступает сигнал отрицательной обратной связи через резистор R4. Время изменения выходного напряжения определяется значением входного сигнала и регулируется потенциометрами R7 и R8. Резистор R1 обеспечивает связь между входом ЗИ и узлом управления, резисторы R5 и R6 связывают усилители А1 и А2, а резистор R9 устанавливает необходимый уровень напряжения на инвертируемом входе интегратора А2. Полное время развертки входного сигнала (время интегрирования) может быть установлено от 1 до 14 с.
leg.co.ua
Тиристорный электропривод
Использование: в электротехнике, для приводов постоянного и переменного тока. Сущность: улучшение динамических и статических характеристик достигается тем, что в тиристорный электропривод, содержащий преобразователь, соединенный с электродвигателем, датчиком тока, системой импульсно-фазового управления, соединенной с регулятором тока, регулятор скорости, соединенный с задатчиком и датчиком скорости, введены токовый детектор и сумматор импульсов управления тиристорами. 3 ил.
Изобретение относится к электротехнике, в частности к автоматизированным электроприводам, и может найти применение в электроприводах постоянного и переменного тока.
Известен тиристорный электропривод постоянного тока (Динамика вентильного электропривода постоянного тока./Под редакцией канд.техн.наук А.Д.Поздеева. Энергия, 1975, с.158,159 168-178, 201-216), содержащий тиристорный преобразователь, систему импульсно-фазового управления (СИФУ) тиристорами, двигатель с тахогенератором, устройство линеаризации характеристик (УЛХ) преобразователя в режиме прерывистого тока (РПТ), регуляторы тока и скорости двигателя, задатчик скорости и датчик тока. Электропривод в своей основе выполнен на классической структуре подчиненного регулирования скорости двигателя, уровень которой определяется задатчиком скорости. УЛХ преобразователя в РПТ осуществляет поддержание постоянства коэффициента передачи преобразователя в зависимости от длительности тока, обеспечивая тем самым высокие динамические качества и устойчивость системы электропривода. Однако УЛХ не может устранить недостаток, обусловленный исчезновением регулирующего воздействия в цепи обратной связи по току в РПТ при безинерционном регуляторе тока, например, пропорциональном (П-регуляторе). Аналогичные недостатки имеют место в системах с дополнительной жесткой обратной связью по току на вход СИФУ, а также в случае применения П-регулятора тока, в котором в РПТ исчезает отработка пропорциональной составляющей обратной связи по току (см.указанную выше литературу, с.158,159, 168-178). Это приводит к ухудшению динамических характеристик электропривода как постоянного, так и переменного тока. Наиболее близким по технической сущности к изобретению является электропривод серии ЭПУ1-2 (Донской Н.В. Иванов А.Г. и др. Электроприводы постоянного тока для станков, роботов и других промышленных механизмов. Электротехника, N 2, 1988, с.5-10). Электропривод содержит тиристорный преобразователь, двигатель, датчик тока, датчик скорости (тахогенератор), СИФУ, УЛХ, регулятор скорости (РС) и задатчик скорости. УЛХ состоит из двух нелинейных звеньев (НЗ): в цепи РС и в цепи обратной связи по скорости. На вход управляющего органа СИФУ поступает сигнал НЗ и сигнал жесткой отрицательной обратной связи по току. В этом случае управляющий орган с обратной связью по току представляет собой как бы пропорциональный (безинерционный) П-регулятор тока. В РПТ в момент паузы в токе контур тока размыкается, т.е. в прерывистом режиме регулятор тока не работает, а осуществляет свои функции только в режиме непрерывного тока (когда обратная связь по току не прерывается). Данный электропривод имеет следующие недостатки. Размыкание контура тока в РПТ приводит к тому, что нет регулирующего воздействия обратной связи по току и заданное значение тока не обрабатывается, в системе регулирования появляется ошибка. Особенно это негативно сказывается в однофазных тиристорных электроприводах, а также в электроприводах с малоиндуктивными высокомоментными двигателями, где большая зона РПТ, которая доходит до номинального тока двигателя. Следствием этого является также недостаток, выражающийся в изменении уровня токоограничения при изменении напряжения питающей сети и температуры окружающей среды, что влияет на статические и динамические характеристики электропривода. Технический результат заявляемого решения улучшение статических и динамических характеристик электропривода. Технический результат достигается тем, что в тиристорный электропривод, содержащий тиристорный преобразователь, выход которого предназначен для подключения к электродвигателю, а вход соединен с СИФУ, подключенной к регулятору тока, соединенному с датчиком тока и РС, входы которого подключены к задатчику и датчику скорости, введены пиковый детектор и сумматор импульсов управления тиристорами, при этом основной вход пикового детектора соединен с датчиком тока, управляющий вход с сумматором импульсов управления, вход которого соединен с выходом СИФУ, выход пикового детектора соединен с регулятором тока. Сущность изобретения заключается в том, что улучшение характеристик электропривода достигается за счет исключения эффекта исчезновения регулирующего воздействия обратной связи по току в РПТ при сохранении высокого быстродействия системы. Это реализуется введением в канал обратной связи по току пикового детектора, основной вход которого соединен с выходом датчика тока, управляющий вход подключен к введенному сумматору импульсов управления, а выход к входу регулятора тока. На фиг. 1 приведена схема заявляемого электропривода, где 1 тиристорный преобразователь, 2 электродвигатель, 3 датчик тока, 4 датчик скорости (тахогенератор), 5 СИФУ тиристорами, 6 регулятор тока, 7 РС, 8 задатчик скорости, 9 пиковый детектор, 10 сумматор импульсов управления; на фиг.2 приведена схема пикового детектора (см. Фолкенберри Л. Применение операционных усилителей и линейных ИС. М: Мир, 1985, с. 233-234), где 11, 16 усилители, 12, 13 диоды, 14 конденсатор, 15 ключ сброса, 17 резистор; на фиг.3 приведены диаграммы сигналов на выходах элементов 3,9,10. Тиристорный преобразователь 1 соединен с двигателем 2 и датчиком 3 тока, с двигателем сочленен датчик 4 скорости, к преобразователю подключена СИФУ 5, вход которой соединен с регулятором 6 тока, первый вход которого подключен к РС 7. Входы РС 7 соединены с задатчиком 8 и датчиком 4 скорости, второй вход регулятора 6 тока соединен с пиковым детектором 9, основной вход которого подключен к датчику 3 тока, а управляющий вход к сумматору 10 импульсов, подключенному к выходу СИФУ 5. Электропривод работает следующим образом. В соответствии с уpовнем задающего сигнала задатчика 8 скорости и нагрузкой двигателя 2 на выходах регуляторов 7 и 6 устанавливаются сигналы, которые определяют угол регулирования СИФУ 5 тиристорного преобразователя 1. На выходе датчика 3 тока в РПТ имеют сигнал, изображенный на фиг.3, 3. Этот сигнал поступает на основной вход пикового детектора 9 и в нем превращается в сигнал, изображенный на фиг.3, 9. На управляющий вход детектора 9 поступают импульсы с выхода сумматора 10, изображенные на фиг.3, 10. Таким образом, прерывистая форма тока при помощи детектора 9 и сумматора 10 превращается в непрерывную и информация по току в РПТ не исчезает, обеспечивая нормальную работу регулятора тока с любой передаточной функцией (П, ПИ, ПИД). В моменты появления импульса управления пиковый детектор 9 кратковременно обнуляется и в него производится запись новой информации по току нового амплитудного значения тока im1 (im2), которое запоминается на интервале периода дискретности тиристорного преобразователя T где о динамическая частота сети; m фазность преобразователя; f частота сети. Преимуществом предлагаемого электропривода по сравнению с прототипом является улучшение характеристик в РПТ. Характеристики улучшаются за счет действия регулятора тока в прерывистом режиме и обеспечением точности отработки и поддержания тока (в прототипе П-регулятор тока в РПТ не работает). Следует заметить, что включение в цепь датчика тока вместо пикового детектора 9 и сумматора 10 известного RC-фильтра оптимально не решает указанную проблему, так как такой фильтр вносит инерционность в канал регулирования, ухудшая динамические характеристики и устойчивость электропривода. Большую эффективность можно получить в однофазных электроприводах, которые работают в основном в РПТ. Испытания заявляемого электропривода, проведенные во ВНИИР, дали положительный результат. Использование заявляемого решения планируется с 1993-1994 г. в новой серии однофазных электроприводов на Харьковском заводе “Электромашина”.Формула изобретения
ТИРИСТОРНЫЙ ЭЛЕКТРОПРИВОД, содержащий тиристорный преобразователь, выход которого предназначен для подключения электродвигателя, а вход соединен с системой импульсно-фазового управления, подключенной к регулятору тока, соединенному с датчиком тока и регулятором скорости, входы которого подключены к задатчику и датчику скорости, отличающийся тем, что в него введены пиковый детектор и сумматор импульсов управления тиристорами, при этом основной вход пикового детектора соединен с датчиком тока, управляющий вход с сумматором импульсов управления, вход которого соединен с выходом системы импульсно-фазового управления, выход пикового детектора соединен с регулятором тока.РИСУНКИ
Рисунок 1, Рисунок 2, Рисунок 3findpatent.ru
Тиристорный электропривод — Большая советская энциклопедия
Тири́сторный электропри́вод
Электропривод, в котором режим работы его исполнительного двигателя (ИД) или иного исполнительного механизма (ИМ) регулируется преобразовательным устройством (ПУ) на Тиристорах (см. Преобразовательная техника).
В Т. э. переменного тока в качестве ИД чаще всего применяют асинхронные и синхронные трёхфазные электродвигатели, режим работы которых можно регулировать изменением частоты и амплитуды напряжения, подводимого к статору, а в случае синхронного двигателя — также изменением тока в обмотке возбуждения. В Т. э. этого типа, питающихся от источника переменного тока, регулирующим ПУ обычно служит тиристорный Преобразователь частоты, выполненный либо с промежуточным звеном постоянного или переменного тока, либо по схеме с непосредственной связью. При питании таких Т. э. от источника постоянного тока в качестве ПУ используют автономный Инвертор. Реверсирование ИД (см. Реверсивный электропривод) в Т. э. переменного тока осуществляют, изменяя последовательность чередования фаз напряжения, подводимого к статору.
В Т. э. постоянного тока применяют двигатели постоянного тока с последовательным, параллельным, смешанным или независимым возбуждением, регулирование режимов работы которых можно производить по цепи обмотки якоря или обмотки возбуждения. В Т. э. этого типа, питающихся от источника переменного тока, ПУ служит тиристорный Выпрямитель тока. Если питание таких Т. э. осуществляется от источника постоянного тока, то ПУ выполняют в виде импульсного регулятора постоянного тока или системы «инвертор — выпрямитель» с промежуточным звеном переменного тока повышенной частоты. В Т. э. постоянного тока реверсирование ИД производят изменением направления тока в обмотке якоря или обмотке возбуждения двигателя (при этом применяют второе такое же ПУ, включаемое встречно-параллельно с первым по отношению к цепи ИД).
Для гальванической развязки цепей питания и нагрузки, а также при необходимости согласовать величины напряжения источника питания и ИД в Т. э. используют трансформатор, включая его на входе ПУ (если Т. э. питается от источника переменного тока) или в его промежуточном звене (при питании Т. э. постоянным током). Управление передаваемым через ПУ потоком энергии осуществляют посредством ручной или автоматической системы управления и регулирования (СУР), включающей блоки питания, регулирования частоты и напряжения, формирования управляющих импульсов для тиристоров силовых цепей ПУ, а также блоки защиты от токов короткого замыкания, перегрузок и перенапряжении. Современные СУР выполняют на типовых логических блоках (см. Логический элемент) и интегральных схемах (См. Интегральная схема), имеющих малые габариты, высокие быстродействие и надёжность. Для отвода тепла от тиристоров и ИД используют естественное или принудительное воздушное либо жидкостное охлаждение.
Т. э. находят применение в различных отраслях промышленности и на транспорте. Мощность Т. э. составляет (в зависимости от их назначения) от нескольких квт до 10 Мвт и выше.
Лит.: Ривкин Г. А., Преобразовательные устройства, М., 1970; Чиликин М. Г., Общий курс электропривода, 5 изд., М., 1971.
Ю. М. Иньков.
Источник: Большая советская энциклопедия на Gufo.megufo.me
ОСНОВНЫЕ ПРИНЦИПЫ РАБОТЫ ТИРИСТОРНЫХ ПРЕОБРАЗОВАТЕЛЕЙ ЭЛЕКТРОПРИВОДОВ ПОСТОЯННОГО ТОКА
ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА
Производим и продаем электроприводы ЭТУ, ЭПУ для двигателей постоянного тока, тел./email +38 050 4571330 / [email protected]Привод ЭПУ 25А с дросселем – 5500грн
Цены на преобразователи частоты 220/380В 1 фаза в 3 фазы (12.11.14г.):
Модель Мощность Цена
CFM110 0.25кВт 1500грн
CFM110 0.37кВт 1600грн
CFM210 1,0 кВт 2200грн
CFM210 1,5 кВт 2400грн
CFM210 2,2 кВт 2900грн
CFM210 3,3 кВт 3400грн
Гарантия – 2 года.
Контакты для заказов:
+38 050 4571330
[email protected]
Управление двигателями постоянного тока в электроприводах подач станков, с ЧПУ осуществляется в настоящее время с помощью тиристорных преобразователей (в широтно-импульсных преобразователях небольшой мощности в качестве силовых элементов могут применяться мощные транзисторы). Тиристор – ный преобразователь ТП, работающий на нагрузку в виде ДПТ, состоит из двух основных частей (рис. 2.1): силовой схемы и системы импульсно-фазового управления. Основное назначение силовой схемы — преобразование 3-фазного переменного напряжения сетн в постоянное напряжение £/тп для питания якорной цепи ДПТ, величина которого зависит от величины управляющего напряжения UУрр, подаваемого на вход ТП. В отличие от обычного управляемого выпрямителя силовая схема ТП в определенных режимах работы ДПТ осуществляет обратное преобразование напряжения постоянного тока в напряжение переменного тока (так называемый инверторный режим). Для регулирования величины выпрямленного напряжения изменяют длительность проводящего состояния тнрн- стора путем изменения фазового угла открывания тиристора а относительно начала положительной полуволны анодного напряжения. Эту задачу решает система импульсно-фазового управления СИФУд осуществляя преобразование непрерывного входного сигнала управления £/уПр в фазовый сдвиг отпирающего импульса а^что иллюстрируется рис. 2.2. Здесь для фазы А показано пилообразное опорное напряжение с линейно-нарастающим рабочим участком а—d. Значение начального угла управления аНач. отсчитываемогб от момента естественного отпирания тиристора, устанавливается напряжением смещения UCK. При увеличении действующего встречно смещению входного управляющего напряжения £/упр угол управления а уменьшается. Зависимость угла а от t/ynp может быть определена из следующих соображений. Пусть измене-
1С
Нию сOt= — (о — круговая частота напряжения питания) соответствует изменение напряжения на выходе генератора пилообразного напряжения, равное Uru тогда на основании соотношения, которое непосредственно следует из рассмотрения рис. 2.2,
ABC
ГТп
Силобая Рис. 2.1. Блок-схема тиристорного преобразователя |
I Система Uynp импдльсно- |
Фазового управления |
Анач — а я/2
Иупр ип
Можно – записать выражение, связывающее угол управления с сигналом на входе
СИФУ:
Я ^упр
-*нач – 2 • ц
Практически в СИФУ в качестве опорного напряжения может использоваться не только пилообразное напряжение, но и синусоидальное, косинусоидальное, сформированное из отрезков синусоид напряжений нескольких фаз питающей сети и т. д. Опорное напряжение должно быть синхронизировано с соответствующей фазой питающей сети. 1
Структурная схема СИФУ для управления тиристором фазы А1 показана на рис. 2.3. Она состоит из фазосдвигающего устройства ФСУ и усилителя-формирователя импульсов УФИ. ФСУ состоит из блока опорного напряжения БОН, узла суммирования опорного напряжения Uon с входным управляющим напряжением f/yirp и нуль-органа НО. Формирование опорного напряжения в БОН осуществляется из напряжения а, жестко привязанного по фазе к напряжению питающей сети А1. Напряжение с выхода узла суммирования подается на вход НО, Который формирует импульс в момент сравнения напряжений U0N И UУпр или в момент прохождения через нуль суммарного напряжения. Далее этот импульс после усиления и формирования подается на управляющий электрод тиристора дЛя его открывания. Управляющие импульсы должны иметь достаточную мощность и высокую крутизну, необходимую для четкого открывания тиристоров. Ток в импульсе должен превышать ток управления спрямления тиристора, а длительность импульса должна превышать время нарастания силового тока тиристора до величины тока “удержания.
|

Наибольшее применение нашел так называемый вертикальный принцип построения СИФУ, при котором в результате суммирования Uon и £/уПр получается напряжение UВх. но, повторяющее по форме напряжение UaП, но Смещенное по вертикали в ту или иную сторону в зависимости от величины, и знака напряжения £/уцр (рис. 2.4).
Ниже рассматриваются особенности и принципы работы силовых схем ти – ристорных преобразователей (для краткости далее просто тиристорных преобразователей). Тиристорные преобразователи выполняются однофазными и многофазными. Прн небольшой мощности нагрузки и невысоких требованиях к каче-
Рис. 2.3. Структурная схема СИФУ |
Рис. 2.4. Принцип вертикального управления
Ству управления применяются более простые однофазные 777. В приводах подач станков в основном применяются многофазные ТП, что связано с существенным уменьшением пульсаций выпрямленного напряжения, более высоким быстродействием и “т. д. Все многофазные силовые схемы ТП делятся на нулевые и мостовые.
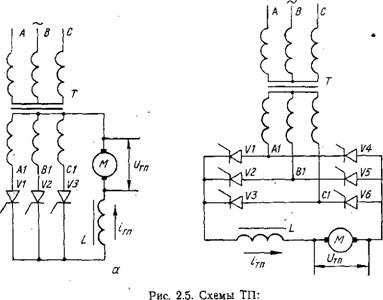
В нулевых схемах (рис. 2.5, а) нагрузка, например якорная цепь электродвигателя, подключается к нулевой точке вторичной обмотки трансформатора и к общей точке, в которой объединяются тиристоры, подключенные к вторичным обмоткам трансформатора. Если тиристоры объединены своими катодами, такое включение называют катодной группой тиристоров, если же анодами — анодной группой тиристоров. Для сглаживания “пульсаций выпрямленного тока последовательно с нагрузкой включается реактор, представляющий собой дроссель с большой индуктивностью L. Мостовая схема (рис. 2.5, б) получается путем последовательного соединения двух нулевых схем: анодной и катодной. При этом – используются оба полупериода переменного напряжения, однако число тиристоров в такой схеме в 2 раза больше, чем в нулевой. Мостовые схемы обеспечивают более высокое выпрямленное напряжение, меньшую величину и большую частоту пульсаций, лучшее использование силового трансформатора. Приведенные схемы относятся к нереверсивным ТП.
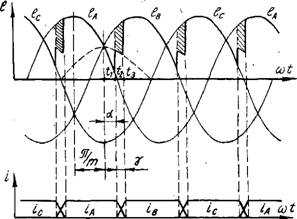
На примере более простой нулевой схемы ТП (рис. 2.5) рассмотрим некоторые особенности и принцип работы ТП. Более подробные сведения по теории работы управляемых вентильных преобразователей и необходимые соотношения можно найти в работах [5—§]. Первоначально положим, что вместо тиристоров включены обычные диоды VI—V3, аноды которых находятся под потенциалами выводов соответствующих вторичных обмоток относительно нулевого вывода (напряжения ел, ев, ес). Эти напряжения сдвинуты относительно друг друга на угол 2 лjm (где m — число фаз)! как показано на рис. 2.6. В промежуток времени U—U ток проходит только через диод VI, поскольку напряжение ел, приложенное к катодам диодов V2 и V3, больше напряжений ев и ее, приложенных к их анодам, и, следовательно, запирает их. В момент H напряжение ев сравни-
А — нулевая; 6 — мостовая |
Вается с ее и далее превышает последнее. Следовательно, с этого момента начинает проводить ток диод V2, а напряжение ев, приложенное к катодам диодов VI и V3, запирает их. Процесс перехода тока с одного диода на другой под дей-. ствием ЭДС вторичной обмотки трансформатора называется естественной коммутацией. Соответственно период ti—12 называется периодом естественной коммутации. Естественная коммутация свойственна неуправляемым выпрямителям. При этом среднее значение выпрямленного напряжения равно
Г— т я » •
Ud0=V 2 Е2—sin — , (2.3)
П т
Где Яг — действующее значение ЭДС вторичной обмотки трансформатора. Реально процесс коммутации вентилей протекает не мгновенно, а в течение некоторого промежутка времени. Это связано с действием индуктивности рассеяния вторичных обмоток трансформатора, которая поддерживает ток в вентиле, выходящем из работы, и уменьшает ток в вентиле, входящем в работу. По этой причине существует период, когда ток проходит через два вентиля. Фазовый угол у, соответствующий этому периоду, называется углом коммутации (рис. 2.6). В коммутационный период потенциал общей точки катодов, который должен был иметь значение ев, равен полусумме ЭДС двух фаз ‘/2 (eA+eB). В конце процесса коммутации, когда вентиль VI закрывается, этот потенциал скачком возрастает до величины, определяемой ЭДС фазы В. В результате среднее значение выпрямленного напряжения уменьшается на величину
Iff/ IS// I I |
£
4×1 ^ ix! ^ Ixl И ixl <-a
Рис. 2.6. Коммутация токов в неуправляемом выпрямителе |
(2.4)
Где Х2т — индуктивное сопротивление рассеяния вторичной обмотки трансформатора; In — ток нагрузки. В контуре коммутации, состоящем из вторичных обмоток трансформатора (фазы А1 и BJ) и вентилей VI, V2, действует разность ЭДС ев—еА, показанная штриховой линией на рис. 2.6. Заштрихованные площадки отражают эффект уменьшения выпрямленного напряжения, связанный с процессом коммутации.
В управляемых выпрямителях вместо диодов применяют тиристоры, на управляющий электрод которых подается управляющий импульс, смещенный относительно точки естественного открывания на некоторый фазовый угол а, называемый углом запаздывания зажигания, так как он. характеризует запаздывание открывания тиристора по сравнению с моментом естественного зажигания (рис. 2.7). При этом соответственно смещается во времени момент вступления в работу очередного тиристора и затягивается работа предыдущего. Наблюдается также процесс коммутации. Среднее значение выпрямленного напряжения UB будет пропорционально cos а.
UB=Udo cos a.
Эффект управления 777 иллюстрируется рис. 2.8, на котором показаны графики выходного напряжения при изменении угла управления а от 0 до 90°. Здесь же показан минимальный угол атш, при котором ТП теряет управление, так как ЭДС двигателя £дв в зоне amin больше мгновенного значения напряжения фазы, и напряжение на тиристоре становится отрицательным. Кривая мгновенных зна-
Рис. 2.7.’ Коммутация токов в управляемом выпрямителе |
Чений выпрямленного напряжения выделена жирной линией. – Для наглядности на одном графике показано изменение угла а от 0 до 90°, тогда как реально при каждом значении а может проходить любое количество периодов напряжения фаз питающей сети. Можно видеть, что прохождение тока будет и прн отрицательном значении фазного напряжения. Это объясняется наличием индуктивности в цепи нагрузки. Также следует отметить, что при работе ТП напряжение на его зажимах будет меньше, чем среднее значение выходного напряжения выпрямителя. Это связано с падением напряжения на тиристорах, на активном сопротивлении силовой цепи, а также с процессом коммутации тиристоров. Последнее, имеет наибольшее значение и обычно превышает два предыдущих. Падение напряжения на тиристорах можно принять примерно постоянным Д£/т = 0,5—1,0 В. Падение напряжения на активном сопротивлении силовой цепи пропорционально току нагрузки AUR—IBRR4.
То1*да на зажимах ТП среднее выпрямленное напряжение равно
UB = Ui0 cos А—AUk-—&UR—hUT. (2.6)
Или
UB = Ud0Cos А–Ц X2t^m + /Ц – AUT. (2.7)
Последнее выражение представляет собой внешнюю характеристику ТП (рис. 2.9), из которой следует, что с увеличением угла а напряжение на зажимах ТП уменьшается, а при постоянном значении а уменьшение этого напряжения происходит с увеличением тока – нагрузки. Наклон внешней характеристики отражает внутреннее сопротивление ТП, которое определяется отношением
TUZZmiL
Рис. 2.8. Выходное напряжение ТП при различных углах управления
(2.8)
Можно видеть, что в области больших токов нагрузки Rim относительно мало, однако с уменьшением тока нагрузки наклон характеристик увеличивается, что говорит об увеличении внутреннего сопротивления ТП. Последнее связано с тем, что ТП переходит из режима «непрерывного тока» нагрузки в режим «прерывистых токЪв». Физическая картина появления прерывистых токов поясняется рис. 2.10. При уменьшении тока нагрузки уменьшается количество энергии, за-
|

Пасаемой в индуктивности силовой цепи, так как последняя в реальных условиях имеет конечное значение, и наступает момент, когда накопленной энергии оказывается недостаточно, чтобы поддерживать ток при отрицательных напряжениях на аноде тиристоров, вследствие чего ток в цепи якоря уменьшается до нуля, т. е. становится прерывистым. Уменьшение энергии, запасаемой в индуктивности силовой цепн, при уменьшении тока нагрузки отражается на рис. 2.10 уменьшением заштрихованной площадки S2, соответствующей /fyg проводящему состоянию вентиля при отрицательном напряжении на его аноде. В промежутках ti—при отсутствии тока в цепи нагрузки напряжение на зажимах ТП равно ЭДС двигателя £дв.
Рис. 2.10. Кривые выпрямленного напряжения: |
Существует определенная связь между углом регулирования а н граничным током нагрузки /гр, разделяющим указанные два режима работы ТП. По мере уменьшения напряжения холостого хода t/xx величина граничного тока увеличивается, и режим прерывистых токов будет наблюдаться при больших значениях тока нагрузки. В общем виде эта связь определяется формулой
Где Хв — индуктивное сопротивление нагрузки.
Этому выражению на рис. 2.9 соответствует штриховая линия, ограничивающая режим прерывистых токов и представляющая собой дугу эллипса.
Выше был рассмотрен выпрямительный режим работы ТП. Однако использование только такого режима работы существенно ограничивает возможности управления двигателем постоянного тока. Обратимся к рис. 2.2, 2.5, 2.8 и выр
msd.com.ua
ТИРИСТОРНЫЙ ЭЛЕКТРОПРИВОД – что такое в Большой Советской энциклопедии
Электропривод, в котором режим работы его исполнительного двигателя (ИД) или иного исполнительного механизма (ИМ) регулируется преобразовательным устройством (ПУ) на Тиристорах (см. Преобразовательная техника).
В Т. э. переменного тока в качестве ИД чаще всего применяют асинхронные и синхронные трёхфазные электродвигатели, режим работы которых можно регулировать изменением частоты и амплитуды напряжения, подводимого к статору, а в случае синхронного двигателя — также изменением тока в обмотке возбуждения. В Т. э. этого типа, питающихся от источника переменного тока, регулирующим ПУ обычно служит тиристорный Преобразователь частоты, выполненный либо с промежуточным звеном постоянного или переменного тока, либо по схеме с непосредственной связью. При питании таких Т. э. от источника постоянного тока в качестве ПУ используют автономный Инвертор. Реверсирование ИД (см. Реверсивный электропривод) в Т. э. переменного тока осуществляют, изменяя последовательность чередования фаз напряжения, подводимого к статору.
В Т. э. постоянного тока применяют двигатели постоянного тока с последовательным, параллельным, смешанным или независимым возбуждением, регулирование режимов работы которых можно производить по цепи обмотки якоря или обмотки возбуждения. В Т. э. этого типа, питающихся от источника переменного тока, ПУ служит тиристорный Выпрямитель тока.Если питание таких Т. э. осуществляется от источника постоянного тока, то ПУ выполняют в виде импульсного регулятора постоянного тока или системы «инвертор — выпрямитель» с промежуточным звеном переменного тока повышенной частоты. В Т. э. постоянного тока реверсирование ИД производят изменением направления тока в обмотке якоря или обмотке возбуждения двигателя (при этом применяют второе такое же ПУ, включаемое встречно-параллельно с первым по отношению к цепи ИД).
Для гальванической развязки цепей питания и нагрузки, а также при необходимости согласовать величины напряжения источника питания и ИД в Т. э. используют трансформатор, включая его на входе ПУ (если Т. э. питается от источника переменного тока) или в его промежуточном звене (при питании Т. э. постоянным током). Управление передаваемым через ПУ потоком энергии осуществляют посредством ручной или автоматической системы управления и регулирования (СУР), включающей блоки питания, регулирования частоты и напряжения, формирования управляющих импульсов для тиристоров силовых цепей ПУ, а также блоки защиты от токов короткого замыкания, перегрузок и перенапряжении. Современные СУР выполняют на типовых логических блоках (см. Логический элемент) и интегральных схемах (См. Интегральная схема), имеющих малые габариты, высокие быстродействие и надёжность. Для отвода тепла от тиристоров и ИД используют естественное или принудительное воздушное либо жидкостное охлаждение.
Т. э. находят применение в различных отраслях промышленности и на транспорте. Мощность Т. э. составляет (в зависимости от их назначения) от нескольких квт до 10 Мвт и выше.
Лит.: Ривкин Г. А., Преобразовательные устройства, М., 1970; Чиликин М. Г., Общий курс электропривода, 5 изд., М., 1971.
Ю. М. Иньков.
rus-bse.slovaronline.com