Устройство тиристорное возбудительное: Возбудитель тиристорный синхронных двигателей ВТСД
alexxlab | 26.02.2023 | 0 | Разное
Тиристорные возбудители серии ВТЕ-320, Группа Русэлт
Тиристорный возбудитель ВТЕ- 320 предназначен для питания обмотки возбуждения, управления и автоматического регулирования тока возбуждения синхронных электродвигателей при прямом (реакторном) пуске от сети или в составе частотно-регулируемых электроприводов.
Оборудование разработано для работы и защиты крупных синхронных электродвигателей типа СТД, СДГ и СДГМ и других двигателей с щеточным механизмом, мощностью до 12500кВт в синхронном, переходных и аварийных режимах.
Производится ЗАО «Электромаш» по техническим условиям ТУ 3416-048-55978767-16
| BTE | 320 | WW | 11 | Ц | Э | Р | XXXX |
| Номинальный ток возбуждения, А | 320 | ||||||
| Номинальное напряжение возбуждения, В | 48 | ||||||
| 75 | |||||||
| 115 | |||||||
| 150 | |||||||
| 230 | |||||||
| Модель | 11 | ||||||
| Тип управления | Аналоговый | ||||||
| Цифровой | Ц | ||||||
| Группы тиристоров | Одна | ||||||
| Две | Э | ||||||
| Блоки управления | Резервируемый | Р | |||||
| Климатическое исполнение | Для эксплуатации в районах с умеренным климатом в закрытых помещениях с естественной вентиляцией | У3 | |||||
| Для эксплуатации в районах с умеренным климатом в закрытых помещениях с искусственной вентиляцией | У4 | ||||||
| Для эксплуатации в районах с умеренным и холодным климатом на открытом воздухе | УХЛ1 | ||||||
| Для эксплуатации в районах с умеренным и холодным климатом в помещениях с искусственно регулируемыми климатическими условиями | УХЛ4 | ||||||
Тиристорный возбудитель ВТЕ-320 обеспечивает:
- Подачу возбуждения при остановленном электродвигателе в режиме опробования
- Прямой пуск с подачей возбуждения, как в функции тока статора, так и в функции скольжения
- Реакторный пуск с подачей возбуждения после включения шунтирующего выключателя
- Пуск с высоковольтным устройством плавного пуска (асинхронный пуск)
-
Пуск с высоковольтным преобразователем частоты (синхронный пуск).


Конструкция Тиристорного возбудителя
Тиристорный возбудитель ВТЕ 320 состоит из двух конструктивных единиц: шкафа возбудителя и силового согласующего трансформатора, защищенного исполнения.
Шкаф возбудителя представляет собой металлический шкаф двухстороннего обслуживания, в составе которого входят: основной и форсировочный (для 11ЦЭ) тиристорные преобразователи, пусковое сопротивление с тиристорным ключом, микропроцессорный блок БУВ-5 и элементы управления и контроля. Установленные приборы измерения контролируют основные параметры системы управления, тока и напряжения возбуждения, тока статора двигателя и значение коэффициента реактивной мощности «cos φ».
Система управления и контроля
Структурным элементом управления возбудителя является БУВ-5 – это специализированное микропроцессорное устройство предназначенное для управления тиристорными возбудителями синхронных электродвигателей с щёточной системой возбуждения. БУВ-5 управляет процессом подачи и стабилизации тока возбуждения, обеспечивает защиту обмотки возбуждения, тиристорного преобразователя и синхронного электродвигателя. Работа блока определяется алгоритмом программы и основывается на обработке данных поступающих от аналоговых и дискретных входов.
БУВ-5 управляет процессом подачи и стабилизации тока возбуждения, обеспечивает защиту обмотки возбуждения, тиристорного преобразователя и синхронного электродвигателя. Работа блока определяется алгоритмом программы и основывается на обработке данных поступающих от аналоговых и дискретных входов.
Система защиты, сигнализации и диагностики обеспечивает возможность определения режима работы возбудителя через светодиодную индикацию параметров. Одновременно доступны для индикации 17 параметров (для типа 11Ц и 11ЦЭ) 24 параметра (для типа 11ЦЭР). Все параметры возбудителя доступны для просмотра на ПК
КАК ЭТО РАБОТАЕТ
Через согласующий трансформатор тиристорного возбудителя синхронного электродвигателя подается трехфазное переменное напряжение.
Питание возбудителя
Силовой согласующий трансформатор серии ТСЗВ выполняет преобразование электроэнергии в обычном и форсировочном режиме для питания обмотки возбуждения синхронного электродвигателя. Трансформаторы поставляются в защитных кожухах со степенью защиты в стандартном исполнении IР20. Схема и группа соединения У/У-0. Класс нагревостойкости изоляции для умеренного климата «F».
Для возбудителей типа 11ЦЭ и 11ЦЭР применяются трансформаторы ТСЗП-ВЭ с отпайками на вторичных обмотках, обеспечивающих по отдельности работу форсировочной и основной группы тиристоров.
Возможно использование трансформаторов других типов с аналогичными параметрами.
Питание управляющих оперативных цепей возбудителя типа 11ЦЭР осуществляется от двух источников питания ~220 и =220 В. В случае пропадания внешнего питания, работа системы управления возбудителя продолжается от бесперебойного источника питания.
Тиристорный возбудитель типа 11ЦЭР отличается от 11ЦЭ:
Системой резервирования, средствами отображения данных, и возможностью подключения к АСУ ТП.
Основной и резервный блоки управления БУВ-5.
Источник бесперебойного питания для питания системы управления
Сенсорный дисплей для отображения режимов работы возбудителя и редактирования установок параметров.
РЕЖИМЫ РАБОТЫ
В возбудителе предусмотрены автоматический, ручной и аварийный режимы управления током возбуждения. При необходимости, в процессе работы допускается переключение с ручного на автоматический режим и обратно, при этом изменение режима работы происходит без бросков тока.
Ручной режим управления.
При работе в режиме ручного управления ток возбуждения поддерживается на уровне постоянного значения, при этом обеспечивается:
| Прямой пуск синхронного электродвигателя с автоматической подачей возбуждения, как в функции тока статора, так и в функции скольжения | Реакторный пуск с автоматической подачей возбуждения с функции тока статора |
| Стабилизация заданного тока возбуждения при значительных ударных нагрузках электродвигателя | Стабилизация заданного тока возбуждения с точностью не ниже 5% при колебании напряжения питающей сети в пределах 70-110% от номинального и изменения температуры обмотки возбуждения |
| Ограничение напряжения возбуждения по минимуму (в пределах 0…0,5 номинального значения) |
Ограничение тока возбуждения по максимуму (в пределах 0,80. ..1,75 номинального значения) ..1,75 номинального значения) |
| Форсированное гашение поля ротора при отключении двигателя, перерывах питания электродвигателя и наличии дополнительного сигнала на гашение поля | Форсировка по напряжению 1,75 номинального значения при номинальном напряжении сети, питающей возбудитель |
| Плавная регулировка тока возбуждения от 0,3 до 1,4 А номинального, с возможностью подстройки пределов регулирования | Защита ротора от длительной перегрузки по току |
Автоматический режим управления.
При работе в режиме автоматического управления вводится в работу автоматический регулятор возбуждения – АРВ. Значения тока возбуждения и регулятора возбуждения корректируется через кнопки управления на панели шкафа, а также дистанционно. Дополнительно в автоматическом управлении обеспечивается регулирование:
| Поддержание заданного коэффициента мощности электродвигателя (cos φ) | Поддержание напряжения сети |
| Обеспечение устойчивости электродвигателя при увеличении нагрузки | Поддержание напряжения статора при нагрузках меньше номинальной и обеспечение устойчивости электродвигателя при увеличении нагрузки выше номинальной |
Аварийный режим управления.
При работе в режиме аварийного управления аналоговый возбудитель синхронного электродвигателя обеспечивает регулировку тока возбуждения от нуля до форсировочного значения с возможностью подстройки пределов регулирования. Возбудитель содержит следующие системы защиты:
|
от коротких замыканий в цепях тиристорного преобразователя от длительного асинхронного хода электродвигателя |
от потери возбуждения работающего электродвигателя от пробоя изоляции ротора на землю |
| от недопустимых перегрузок по возбуждению от неисправности блок-контактов выключателей |
от частых пусков электродвигателя от низкого напряжения статора |
|
от смены направления мощности от перенапряжения на обмотке возбуждения |
защита пускового сопротивления от перегрева |
Модернизация тиристорных возбудительных устройств синхронных двигателей карьерных экскаваторов
Цели модернизации:
1. Значительное повышение надёжности работы электроприводов с синхронными двигателями
Значительное повышение надёжности работы электроприводов с синхронными двигателями
2. Энергосбережение. Компенсация реактивной мощности потребляемой нагрузками, подключенными к одному фидеру.
3. Повышение эксплуатационных свойств электроприводов с синхронными двигателями.
4. Снижение прямых финансовых потерь в результате внедрения пунктов 1 и 2 проекта.
5. Улучшение условий труда обслуживающего персонала
Реализация
1. Повышение надёжности работы электроприводов с синхронными двигателями
Режим работы синхронного двигателя, его влияние сеть, устойчивость работы в синхронном режиме во многом зависят от тиристорного возбудительного устройства (в дальнейшем ТВУ) управляющего током возбуждения синхронного двигателя.
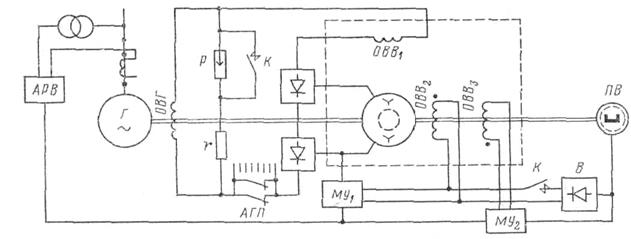
Силовые схемы ТВУ во многом схожи, как правило, это согласующий силовой трансформатор, тиристорный выпрямитель, собранный по мостовой или нулевой схеме, тиристорный ключ и гасящее сопротивление. Силовая часть ТВУ очень надёжна, её элементы, как правило, исправно служат в течение всей жизни ТВУ.
Силовая часть ТВУ очень надёжна, её элементы, как правило, исправно служат в течение всей жизни ТВУ.
Наиболее подвержена отказам система управления ТВУ. Именно от системы управления зависят и сугубо электромеханические характеристики синхронного привода, и экономические последствия его работы.
Применяющиеся в тиристорном возбудителе аналоговые системы управления исчерпали свои возможности, за кажущейся внешней простотой скрываются неразрешимые проблемы:
Проблема №1: кадровая – для настройки микропроцессорной системы управления МБВ.006 специалисту достаточно быть средним пользователем компьютера, таких с каждым годом всё больше. Чтобы настроить аналоговую систему управления, требуются знания и опыт в области электроники, много ли таких специалистов на Вашем предприятии? Их средний возраст?
Проблема №2: запасные части – для поддержания в рабочем состоянии аналоговых систем, требуются электронные компоненты, большая часть которых давно не выпускаются и приобретаются с хранения.
Проблема №3: в связи с большим числом элементов, в аналоговой системе происходят изменения параметров схемы под воздействием внешней среды.
Проблема №4: аналоговые системы из-за ограничений своей структуры не учитывают всего спектра взаимосвязей параметров электропривода (больше связей – сложнее схема) их алгоритмы управления слишком примитивны.
Для повышения надёжности работы синхронного (вообще любого) привода нужна микропроцессорная система управления на современной элементной базе в наиболее полной степени реализующая в себе принцип «прямого цифрового управления». Суть принципа: основную работу в системе выполняет процессор, минимум активных элементов и электрических связей, основное назначение элементов схемы – нормализация сигналов идущих в/из процессора.
При условии схемотехнически правильной реализации нормализующих цепей (большинство из них – стандартные, проверенные временем решения) в микропроцессорной системе наиболее важны качество алгоритмов управления объектом и кода сервисных функций, глубина проработки алгоритмов управления с учётом всех доступных для анализа сигналов, как поступающих извне, так и вычисляемых косвенно.
Взаимосвязь алгоритмов управляющих возбуждением синхронного двигателя сложна, но они должны учитывать все, даже самые невероятные ситуации, это касается любого технологического программного обеспечения.
Всем перечисленным требованиям отвечает Микропроцессорный Блок управления Возбудителем (МБВ.006, МБВ.007).
Технические особенности
Конструктивно МБВ выполнен в виде стального корпуса — моноблока с возможностью крепления, как на стену, так и на дверь возбудителя (6 точек крепления). Внешние разъёмные соединения расположены снизу, в целях исключения попадания на разъёмы воды, которая может попасть на верхнюю крышку блока.
Моноблочная компоновка с внешними разъёмными соединениями ускоряет замену блока на резервный при возникновении неисправности, в случае необходимости, операция замены займёт не более 10 минут.
Внутри корпуса размещены 4 платы:
1. плата процессора (дискретные входы/выходы, разъёмы для подключения внешних интерфейсных плат, аналоговые входы)
2. плата индикации
плата индикации
3. плата усилителей импульсов
4. плата источника питания и датчиков
Платы объединены между собой гибким шлейфом, применение общей изолированной информационной шины, позволило продублировать все сигналы передаваемые через шлейф и повысить надёжность системы.
Платы покрыты слоем полиуретанового лака, защищающего их от воздействия влаги и конденсата. Электронные компоненты – в основном SMD (поверхностный монтаж) что повышает стойкость устройства к вибрации. Температурный диапазон компонентов – индустриальный (-40?С… +85?С).
(По рис.1.) Основной элемент структуры МБВ.006 – процессор, окружённый цепями нормализации и защиты дискретных и аналоговых входов/выходов, которые гарантируют выживаемость процессора при попадании на входы схемы статических разрядов и сигналов с уровнем, превышающим номинальные значения.
Каждый канал усилителя импульсов управления тиристорами имеет обратную связь, благодаря которой ток управления тиристорами поддерживается на постоянном заданном уровне вне зависимости от разброса параметров тиристоров и их изменения от температуры, и колебаниях напряжения питания.
На процессорной плате установлены интерфейсные разъёмы, для подключения дополнительных плат, в настоящее время доступны:
– плата изолированных АЦП (позволяет вводить в систему дополнительные не связанные между собой сигналы =75мВ, =10В, =24В, ШИМ (=5-24В, 0-400Гц))
– изолированный интерфейс RS232
– изолированный интерфейс RS485
– изолированный интерфейс Ethernet
Возможна разработка интерфейсных плат по техническому заданию заказчика.
Ввод уставок и наладка МБВ.006 осуществляется от персонального компьютера (ноутбука) по USB, либо RS232/RS485/Ethernet интерфейсам. По RS232/RS485/Ethernet осуществляется обмен информацией с системой верхнего уровня.
Основа МБВ.006 – его программное обеспечение. Для бесперебойной и корректной работы привода, МБВ имеет встроенные средства диагностики всех датчиков с автоматическим отключением неисправного датчика, например:
1. при работе в автоматическом режиме, при пропадании сигналов напряжения статора, автоматически включается ручной режим (стабилизации тока ротора)
2. при работе в автоматическом режиме, при обрыве датчика тока ротора (отсутствии обратной связи) кроме аварийного завершения работы по защите «Обрывы поля», предусмотрен режим продолжения работы по косвенным данным о токе ротора (для этого срабатывание защиты «Обрыв поля» должно быть запрещено) параметры стабилизируемые в автоматическом режиме останутся неизменными.
при работе в автоматическом режиме, при обрыве датчика тока ротора (отсутствии обратной связи) кроме аварийного завершения работы по защите «Обрывы поля», предусмотрен режим продолжения работы по косвенным данным о токе ротора (для этого срабатывание защиты «Обрыв поля» должно быть запрещено) параметры стабилизируемые в автоматическом режиме останутся неизменными.
3. состояние двигателя (включен/разгоняется/выключен/на выбеге/генераторный режим) безошибочно определяется по прямым и косвенным данным, и в их числе время.
2. Энергосбережение. Компенсация реактивной мощности потребляемой нагрузками, подключенными к одному фидеру.
Реактивная мощность – паразитный фактор неблагоприятный для сети в целом.
Асинхронные электродвигатели и распределительные трансформаторы, являются источниками реактивной электроэнергии (мощности). При их включении в сеть, между электроустановкой и сетью возникает обмен потоком реактивной энергии, суммарная мощность которого равна нулю, но при этом:
– возникают дополнительные потери в проводниках в следствии увеличения тока
– снижается пропускная способность распределительной сети
– напряжение сети отклоняется от номинала (в следствие падения напряжения из-за увеличения реактивной составляющей тока сети)
Избежать этого процесса невозможно, за то возможно свести его к минимуму.
Для компенсации реактивной мощности нужно установить дополнительный источник реактивной мощности (Q – на рисунке), тогда обмен потоками энергиями будет происходить между этим источником и электроустановками на небольшом участке цепи, не проходя по основным сетям, и следовательно не вызывая в них негативных последствий.
В случае когда на участке цепи подключены электроустановки с синхронными электродвигателями (рис.4) можно использовать их способность генерировать реактивную мощность.
В идеальном случае, на участке цепи, суммарная реактивная мощность, генерируемая синхронными двигателями, должна быть равной реактивной мощности потребляемой асинхронными двигателями и трансформаторами. Так как синхронные двигатели, кроме компенсации реактивной мощности, производят полезную работу, то их компенсационные способности будут меняться от максимальной на холостом ходу, до нуля в режиме максимальной нагрузки. Качество работы синхронного двигателя как компенсатора определяется системой управления возбудительного устройства.
Качество работы синхронного двигателя как компенсатора определяется системой управления возбудительного устройства.
Схема подключения возбудителя для компенсации реактивной мощности нагрузки
МБВ.006 позволяет измерять ток и напряжение статора двигателя, определять сдвиг фазы между ними и стабилизировать его заданное значение. Если подключить измерительные цепи МБВ.006 не к двигателю, а к участку цепи, то двигатель, возбуждением которого управляет МБВ.006, станет стабилизировать угол ? нагрузки, но данные о токе статора и угле ? двигателя будут потеряны, что приведёт к аварийным последствиям.
Для компенсации реактивной мощности участка цепи (фидера) необходимо сохранить стандартную схему подключения измерительных цепей статора, и с помощью дополнительного устройства передать системе управления возбудителя информацию о реактивной мощности нагрузки, для принятия решения о компенсации.
Автоматический Регулятор Возбуждения (в дальнейшем АРВ) реализованный в МБВ.006 при работе в режиме компенсации реактивной мощности нагрузки будет автоматически регулировать ток возбуждения в пределах, обеспечивающих устойчивую и длительную (без перегрева) работу двигателя (рис.6.) чётко выделяются три граничных зоны:
1) Ограничение по максимальному току статора. При токе двигателя больше номинального значения (уставка), компенсационные возможности ограничены, а риск выхода из синхронизма велик, по этому блок установит номинальный (т.е. максимально допустимый по нагреву) ток возбуждения
2) Ограничение по максимальному току возбуждения. Исключение перегрева.
при работе АРВ на токах статора ниже номинального, возможна ситуация, когда
для компенсации Q потребуется установить ток возбуждения больше номинального, но блок установит номинальный (т.е. максимально допустимый по нагреву) ток возбуждения.
3) Ограничение по устойчивости.
Для удержания двигателя в синхронизме, ток возбуждения, выставленный АРВ ограничен током, при котором обеспечивается cos ?=1 двигателя на данной нагрузке. То есть, при отсутствии необходимости компенсировать реактивную мощность нагрузки, синхронные двигатели переходят в режим минимума потребляемой активной мощности.
То есть, при отсутствии необходимости компенсировать реактивную мощность нагрузки, синхронные двигатели переходят в режим минимума потребляемой активной мощности.
2.1. Оценка компенсационных свойств синхронных двигателей
Предварительно требуется просчитать, сколько реактивной мощности могут компенсировать электроустановки с синхронными двигателями
2.1.1. Оценка компенсационных способностей двигателя на холостом ходу
[1] где Q — реактивная мощность [kBAр], U – напряжение статора [кВ], Iр – реактивный ток (статора)[А]
Реактивный ток (статора) определяется по векторной диаграмме и рассчитывается по формуле
[2] где Ip – реактивный ток [A], Iн – номинальный (допустимый) ток [A], Iа – активный ток соответствующий сos?=1 [A]
2.1.2. Оценка компенсационных способностей двигателя экскаватора ЭШ-10/70 на холостом ходу
Ток статора номинальный Iн = 139А
Напряжение статора Uн=6кВ
Ток возбуждения номинальный Iвн = 294А
Рис. 1. U-характеристики ЭШ-10/70
1. U-характеристики ЭШ-10/70
Минимальный активный ток холостого хода Iа = 2,3 A (точка А)
Допустимый ток Iн = 139А (номинальный ток статора)
По формуле [2] максимальный реактивный ток Iр = 138,9 А
По формуле [1] максимальная реактивная мощность Q = 833,4 кВАр
При действующем ограничении на ток возбуждения (Iвн = 294А) максимальный реактивный ток при P=0 ограничен значением Iр(Iвн) = 105А
Таким образом, двигатель может длительно отдавать реактивную мощность (по формуле [1])
Qдлит ЭШ-10/70 = 630 кВАр
2.1.3. Оценка компенсационных способностей двигателя экскаватора ЭКГ-8И на холостом ходу
Ток статора номинальный Iн = 60А
Напряжение статора Uн=6кВ
Ток возбуждения номинальный Iвн = 280А
Рис.2. U-характеристика ЭКГ-8И
Минимальный активный ток холостого хода Iа = 5,2 A (точка А)
Допустимый ток Iн = 60А (номинальный ток статора)
По формуле [2] максимальный реактивный ток Iр = 59,8 А
По формуле [1] максимальная реактивная мощность Q = 358,6 кВАр
При действующем ограничении на ток возбуждения (Iвн = 280А) максимальный реактивный ток при P=0 ограничен значением Iр(Iвн) = 42А
Таким образом, двигатель может длительно отдавать реактивную мощность (по формуле [1])
Qдлит ЭКГ-8И = 252 кВАр
2. 1.4. Наибольшая суммарная компенсируемая реактивная мощность
1.4. Наибольшая суммарная компенсируемая реактивная мощность
На холостом ходу, суммарная реактивная мощность, отдаваемая синхронными двигателями экскаваторов, может достигать:
Qmax = 2 Qдлит ЭШ-10/70 + 2 Qдлит ЭКГ-8И = 1764 кВАр
2.1.5. Компенсационная способность двигателей экскаваторов в рабочем режиме.
Оценка способностей двигателей компенсировать реактивную мощность при нагрузке от и выше номинального тока статора не производится, таким образом диапазон работы автоматического регулятора возбуждения (АРВ) ограничен:
1) по току статора: от минимума Icхх (холостой ход) до номинального тока статора Icн
2) по току возбуждения: от Iв?=0 (ток возбуждения при cos?=1) до Iвн (номинальный ток возбуждения)
Рис.4. Диапазон работы АРВ на ЭКГ-8И
2.2. Компенсация реактивной мощности в процессе работы экскаваторов ЭКГ-8И, ЭШ-10/70
Процесс работы экскаваторов состоит из чередования состояний холостого хода и работы под нагрузкой.
Принимаем, что компенсирующей мощности недостаточно для компенсации потребляемой реактивной мощности, в данном режиме, ток возбуждения ограничен Iвн.
На холостом ходу двигатель будет отдавать требуемое количество реактивной мощности в сеть, под нагрузкой с токами статора свыше номинального, двигатель будет потреблять недостающую реактивную мощность из сети.
Рис.5. Регистограмма работы ЭШ-10/70 с наложением графика отдаваемой
реактивной мощности QАРВ в зависимости от режима работы экскаватора
Время холостого хода в рабочем цикле T(QАРВ = Qдлит ЭШ-10/70 ) = 24сек (из 136)
Продолжительность максимальной отдачи реактивной мощности ПК ЭШ-10/70 % = 17%
Рис.6. Регистограмма работы ЭКГ-8И с наложением графика отдаваемой реактивной мощности QАРВ
в зависимости от режима работы экскаватора.
Время холостого хода в рабочем цикле T(QАРВ = Qдлит ЭКГ-8И) = 40сек (из 136)
Продолжительность максимальной отдачи реактивной мощности ПК ЭКГ-8И % = 29%
2. 3. Компенсируемая реактивная мощность в рабочем режиме по фидеру
3. Компенсируемая реактивная мощность в рабочем режиме по фидеру
Продолжительность максимальной отдачи реактивной мощности ПК ЭШ-10/70 % = 17%
Максимально реактивная мощность в длительном рещиме Qдлит ЭШ-10/70 = 630 кВАр
Продолжительность максимальной отдачи реактивной мощности ПК ЭКГ-8И % = 29%
Максимально реактивная мощность в длительном рещиме Qдлит ЭКГ-8И = 252 кВАр
В режиме одновременной производительной работы экскаваторов, их двигатели могут компенсировать:
Q час=(2 Qдлит ЭШ-10/70 )ПК ЭШ-10/70 % /100%+(2 Qдлит ЭКГ-8И )ПК ЭКГ-8И % /100%=360,4 кВАр час
2.4. Блок вычисления нагрузки. Способ передачи данных о нагрузке фидера
В силовом кабеле экскаватора нет дополнительных жил для передачи дополнительных сигналов о нагрузке фидера. Предполагается организовать радиоканал между фидером и блоками МБВ. 006 установленными в тиристорных возбудителях.
006 установленными в тиристорных возбудителях.
Радиоканал реализуется с помощью радиомодемов с диапазоном частот 433МГц, дальность связи до 10км. Радиомодемы в герметичных корпусах в комплекте с антеннами установлены снаружи. Радиомодемы подключены к блокам МБВ.006 и блоку вычисления нагрузки по интерфейсу RS485.
В ячейке фидера установлен блок вычисления нагрузки задачи которого:
– измерение напряжения сети и тока нагрузки
– вычисление реактивной мощности нагрузки (угол ?)
– широковещательная передача значения угла ? блокам МБВ.006 данного фидера
– организация связи с центральным пультом
Блок вычисления нагрузки, передаёт значение угла ? нагрузки одновременно всем блокам МБВ.006 относящихся к данному фидеру. МБВ.006 использует полученные данные как сигнал обратной связи для работы своего АРВ, обеспечивающего компенсацию реактивной мощности нагрузки в пределах возможностей двигателя. Таким образом, генерируемая реактивная мощность равномерно распределяется между синхронными двигателями.
Данные о нагрузке (особенно угол ?) обновляются с частотой 50Гц. Скорость передачи данных по радиоканалу 4,8kBPS, длина широковещательного пакета 8 байт, обратный не требуется, при данных условиях обеспечивается передача сигнала обратной связи с частотой 60Гц.
Блок вычисления нагрузки, периодически опрашивает блоки МБВ.006 и по запросу передаёт эти данные в центральный пульт.
3. Повышение эксплуатационных свойств электроприводов с синхронными двигателями.
МБВ.006 имеет средства записи в энергонезависимой памяти процессов пуска и отключения двигателя. Каждое событие сопровождается 2/2 секундной осциллограммой до/после события с привязкой к реальному времени, данные записываются с разрешением 0,1 сек.
17 июня 2015 г.
Модернизация любых тиристорных возбудителей
Синхронные двигатели оказывают существенное воздействие на энергосистему предприятия. Экономичность работы механизма с синхронным приводом во многом зависит от возбудительного устройства синхронной машины. На сегодняшний день на предприятиях в работе находится огромное количество возбудителей 70-х, 80-х годов выпуска, заложенный инженерами тех лет запас надёжности исчерпан, учащаются простои, есть трудности с ремонтом, а денег на новое оборудование всегда не хватает…
На сегодняшний день на предприятиях в работе находится огромное количество возбудителей 70-х, 80-х годов выпуска, заложенный инженерами тех лет запас надёжности исчерпан, учащаются простои, есть трудности с ремонтом, а денег на новое оборудование всегда не хватает…
4 октября 2014 г.
Обеспечение бесперебойного водоснабжения при нарушениях электроснабжения
При пропадании напряжения на основном вводе возбудители, оснащённые системой управления МБВ.006 и МБВ.007, ускоряют переключение на резервный ввод и ресинхронизацию синхронных двигателей, что позволяет не отключать двигатели при кратковременном отсутствии напряжения…
1 сентября 2014 г.
Варианты исполнения сухих трансформаторов
Сухие трансформаторы ТС в стандартном исполнении поставляются без защитного кожуха, ТСЗ — вариант исполнения трансформатора с защитным кожухом. При стандартном варианте исполнения трансформатора без защитного кожуха (IP00) в комплект поставки включены…
Системы возбуждения Hipase и Thyne
Система возбуждения синхронного генератора позволяет подавать энергию, вырабатываемую двигателем (турбиной), в электрическую сеть.
 В результате при выборе систем высокий приоритет отдается надежности и доступности оборудования возбуждения.
В результате при выборе систем высокий приоритет отдается надежности и доступности оборудования возбуждения.Это относится, в частности, к:
- обеспечивает независимую подачу регулируемого постоянного тока для ротора
- позволяет синхронизировать посредством точного управления напряжением
- поддержка работы сети за счет управления реактивной мощностью
- повышение доступности блоков и сети за счет интеллектуальных ограничителей и дополнительных автоматических регуляторов.
ХИПАСЭ-Э
HIPASE-E – автоматический регулятор напряжения (АРН) со всеми ограничителями, дополнительными регуляторами и вентильным управлением для всех синхронных однофазных и трехфазных генераторов, используемых в широком диапазоне частот. АРН имеет модульную структуру и использует многолетний опыт регулятора напряжения GMR3 компании ANDRITZ Hydro. Проверенные функции управления и регулирования были использованы в дальнейшем и модифицированы в соответствии с последними требованиями производства электроэнергии.
Ограничители и дополнительные регуляторы могут быть включены пользователем в соответствии с требованиями установки.
Прикладная плата HIPASE-E включает в себя регулятор тока возбуждения и генерацию импульсов запуска для SCR. Для аналоговой и цифровой обработки сигналов предусмотрены соответствующие платы аналогового и цифрового интерфейса.
В компактном корпусе (половина размера 19 дюймов) можно обрабатывать до 36 цифровых входов и выходов. Для сложных приложений, использующих большее количество входных и выходных сигналов, полноразмерный 19-дюймовый”жилье используется.
ANDRITZ Hydro предлагает четыре типа систем возбуждения THYNE:
- THYNE1 (для небольших генераторов с возбудителями или без них, ток возбуждения до 25 А)
- THYNE 400 (для генераторов с возбудителями, ток возбуждения до 400 А) )
- THYNE 500 (статическое возбуждение для генераторов с контактными кольцами, ток возбуждения до 4000 А)
- THYNE 600 (статическое возбуждение для генераторов с контактными кольцами, ток возбуждения до 10000 А)
Компактное возбуждение THYNE1
Система THYNE означает:
- Сложные технологии и ноу-хау
- Десятилетия исследований и опыт в разработке систем возбуждения
- Высочайшая доступность и эффективность лет
- 0 Долгий срок службы около
- 0 и многое другое
- Надежность и высокая наработка на отказ
- Комплексное обслуживание, многолетняя гарантия на запасные части и курсы обучения дополняют наш объем поставки.

Комплексные услуги, многолетняя гарантия на запасные части и курсы обучения дополняют наш объем поставки.
В настоящее время роторные возбудители все чаще заменяются тиристорными системами возбуждения. Если сохранение пилотных возбудителей экономически оправдано и не предъявляются высокие требования к динамике регулирования и повышению КПД, то можно повысить эксплуатационные характеристики за счет замены существующего регулятора напряжения современным цифровым многофункциональным автоматическим регулятором. Статическая система возбуждения питается через трансформатор возбуждения от источника питания. Если источником является сам статор генератора, мы имеем в виду «систему возбуждения шунтирующего поля». Если трансформатор возбуждения подключен к внешнему источнику питания, например, к генератору переменного тока, установленному на валу ротора, или к вспомогательному источнику питания установки, он называется «системой возбуждения с внешним питанием». Выходное напряжение трансформатора возбуждения выпрямляется и регулируется тиристорным мостом, а через щетки ротора питает обмотку возбуждения.
Еще одной возможностью является использование вращающегося возбудителя, который может быть либо бесщеточным возбудителем переменного тока с маховиками, либо, особенно на старых установках, возбудителем постоянного тока. Диоды маховика установлены на общем валу генератора и вращающегося возбудителя и подают постоянный ток на ротор. Шестиимпульсный тиристорный блок, управляемый регулятором напряжения, регулирует возбуждающее поле.
Что такое система возбуждения?
ЧТО ТАКОЕ СИСТЕМА ВОЗБУЖДЕНИЯ?
ВВЕДЕНИЕ
1. ОСНОВНАЯ ФУНКЦИЯ Основной функцией системы возбуждения является подача постоянного (постоянного) тока на обмотку возбуждения синхронной машины. Это достигается за счет использования управления с обратной связью (или управления с обратной связью). Современные системы возбуждения также включают в себя функции диагностики для упрощения поиска и устранения неисправностей, протоколы связи для интеграции SCADA и функции ограничения/защиты, гарантирующие, что синхронная машина работает в пределах своей кривой возможностей.
Задача системы возбуждения зависит от применения:
- Для синхронных генераторов она отвечает за поддержание постоянного напряжения на клеммах .
- Для синхронных двигателей отвечает за поддержание постоянного коэффициента мощности .
Синхронная машина, состоящая из ротора и статора, производит переменный ток, используя принцип электромагнитной индукции. Постоянный ток, проходящий через обмотку возбуждения ротора, создает статическое магнитное поле. Поскольку ротор вращается первичным двигателем (например, гидро- или паровой турбиной), магнитное поле также вращается. Поскольку ротор находится внутри статора, вращающееся магнитное поле создает переменный магнитный поток, пересекая обмотки статора. Этот переменный магнитный поток индуцирует переменные токи в обмотках статора синхронной машины. Система возбуждения необходима, так как без тока возбуждения машина работает без тока возбуждения и, следовательно, в обмотках статора машины не генерируется (индуцируется) напряжение.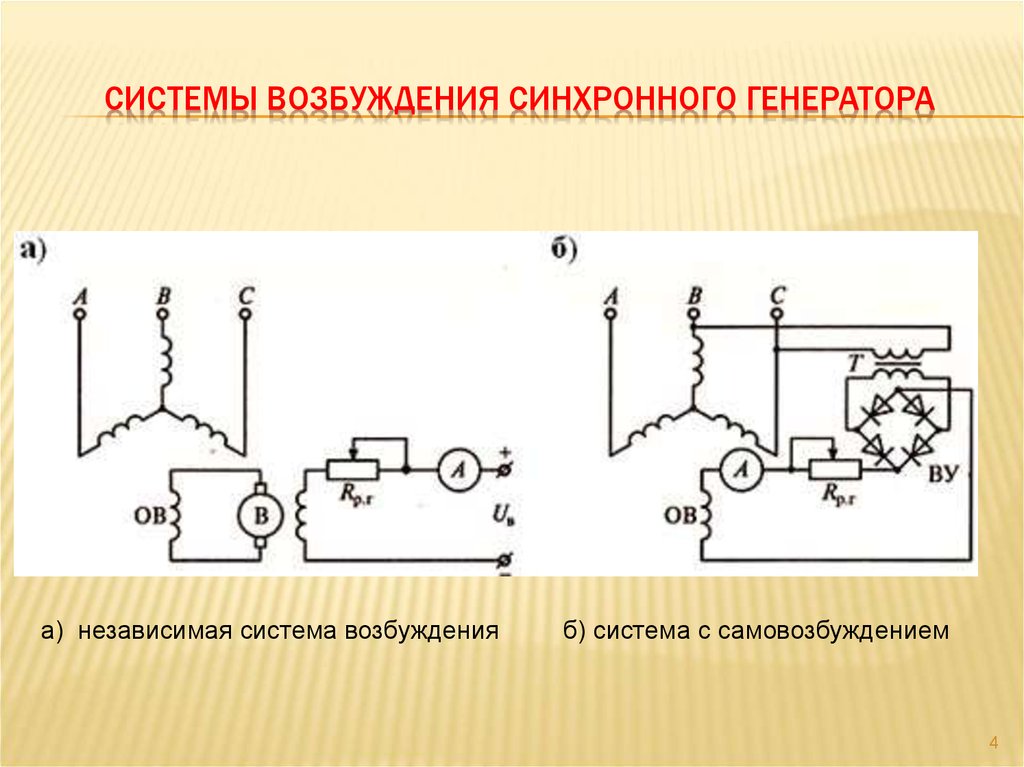
ПОНЯТИЯ СИСТЕМЫ ВОЗБУЖДЕНИЯ
1. ЗАМКНУТЫЙ КОНТУР УПРАВЛЕНИЯСистемы возбуждения используют замкнутый контур или управление с обратной связью для регулирования производительности машины. При управлении с обратной связью выходной сигнал машины направляется обратно в контроллер и сравнивается с заданным значением, а ошибка между заданным значением и выходным сигналом используется для вычисления реакции системы. Контроллер обычно моделируется как ПИД-, ПИ-регулятор или регулятор опережения-запаздывания.
Контур управления Reivax совместим с Модель ST4C , определенная в IEEE 421.5. Упрощенная версия этого контура управления показана на экране ЧМИ Reivax:
Параметры настройки, связанные с контуром управления, можно легко изменить непосредственно с ЧМИ. Три (3) набора параметров настройки позволяют настроить оптимальную реакцию для случая, когда генератор не подключен к сети, и для режима подключения к сети в зависимости от того, активен или нет стабилизатор энергосистемы (PSS):
Пример схемы полного контура управления показано ниже:
2. ОГРАНИЧИТЕЛИ И ЗАЩИТЫ
ОГРАНИЧИТЕЛИ И ЗАЩИТЫ Современные системы возбуждения отвечают за защиту синхронной машины, самой системы возбуждения и других устройств. Ограничители (OEL, UEL, VHz, SCL) и защиты (24, 27, 32, 37F, 40/32Q, 50/51, 59, 59F, 76F, 81O/U) — это программные функции, предназначенные для ограничения работы машины в нежелательных условиях. условиях и реализованы как дополнения к контуру управления AVR. Ограничители обеспечивают постоянную работу машины в пределах возможностей машины, а функции защиты защищают машину, инициируя отключение. Защитные функции возбуждения обычно дублируются в отдельном блоке реле защиты. Можно отключить функции защиты возбуждения и полагаться только на реле защиты агрегата или можно использовать обе функции защиты, и в этом случае необходимо обеспечить координацию между двумя функциями защиты.
Наиболее распространенные ограничители и их функции приведены ниже:
2.1. ОГРАНИЧИТЕЛЬ ПЕРЕВОЗБУЖДЕНИЯ (OEL) Для систем возбуждения производства Reivax ограничители можно легко настроить с помощью ЧМИ. Упрощенная функция передачи и экран конфигурации для OEL, показанные ниже, соответствуют IEEE 421.5 OEL2C. OEL сконфигурирован как кривая обратной зависимости от времени в соответствии с IEEE/ANSI C50.13.
Упрощенная функция передачи и экран конфигурации для OEL, показанные ниже, соответствуют IEEE 421.5 OEL2C. OEL сконфигурирован как кривая обратной зависимости от времени в соответствии с IEEE/ANSI C50.13.
Упрощенная функция передачи и экран конфигурации для UEL показаны ниже. UEL настраивается как кусочно-линейная характеристика в области недовозбуждения (отрицательная реактивная мощность) кривой производительности согласно IEEE 421.5 UEL2C.
3. КООРДИНАЦИЯ ЗАЩИТЫКоординация между ограничителями, ограничителями оборудования и внешними реле защиты является важным аспектом правильной интеграции системы возбуждения. Как правило, согласование выполняется в рамках исследования защиты или проверки модели, при этом настройки проверяются во время ввода оборудования в эксплуатацию.
Во время ввода в эксплуатацию OEL рисуется таким образом, что он перекрывает тепловой предел ротора IEEE/ANSI C50. 13.
13.
Кривая производительности синхронной машины представляет собой графическое представление рабочих пределов машины. Кривая производительности представляет собой график зависимости активной мощности машины (МВт) от реактивной мощности (МВар). Обычно представлены следующие физические пределы эксплуатации:
- Тепловой предел ротора
- Предел турбины
- Практический предел устойчивости
- Ограничение асинхронного хода
Кроме того, обычно представлены следующие ограничители:
- Ограничитель перевозбуждения (OEL)
- Ограничитель пониженного возбуждения (UEL)
Системы возбуждения производства Reivax включают кривую динамической производительности, которую можно использовать для мониторинга рабочих условий в режиме реального времени. Пример такой кривой возможностей показан ниже.
Кривая возможностей показывает безопасную рабочую область машины, обозначенную зеленым цветом, ограниченную ограничителями и физическими ограничениями машины. Он также показывает рабочую точку машины с точки зрения активной и реактивной мощности (обе величины показаны в pu).
Он также показывает рабочую точку машины с точки зрения активной и реактивной мощности (обе величины показаны в pu).
Стабилизатор системы питания (PSS) является дополнением к контуру управления системы возбуждения, которое повышает устойчивость системы за счет компенсации низкочастотных (0-5 Гц) колебаний. в системе питания. Это приводит к более стабильной выходной мощности генератора, что может привести к значительной экономии за счет снижения потерь мощности. Стабилизаторы энергосистем обеспечивают превосходную экономическую эффективность и, как было установлено, приносят миллионы долларов ежегодной выгоды для крупных коммунальных предприятий.
Выход PSS добавлен в контур управления AVR. На изображении ниже показан суммирующий переход PSS в том виде, в котором он появляется в передаточной функции системы возбуждения Reivax.
На приведенном ниже графике показана реакция генератора коммунального масштаба мощностью 32,5 МВт с PSS и без него. Возмущение вводится на 2-й и 12-й секундных отметках. Заметно улучшена переходная и стационарная стабильность. Без ФПС колебания продолжаются около 10 секунд после возмущения, тогда как при включении ФПС они практически сразу затухают.
Возмущение вводится на 2-й и 12-й секундных отметках. Заметно улучшена переходная и стационарная стабильность. Без ФПС колебания продолжаются около 10 секунд после возмущения, тогда как при включении ФПС они практически сразу затухают.
Reivax PSS совместим с моделями IEEE PSS2A и PSS2B .
ТИПЫ СИСТЕМ ВОЗБУЖДЕНИЯ
За прошедшие годы в электроэнергетике появились различные типы систем возбуждения. Они подразделяются на две основные категории в зависимости от источника питания: вращающиеся возбудители и статические возбудители.
1. ВРАЩАЮЩИЕСЯ СИСТЕМЫ ВОЗБУЖДЕНИЯВ вращающихся системах возбуждения имеется два возбудителя: основной возбудитель и вспомогательный возбудитель. Главный возбудитель питает пилотный возбудитель, а пилотный возбудитель, в свою очередь, напрямую питает синхронную машину. Существует две подкатегории вращающихся систем возбуждения: переменного и постоянного тока.
1. 1. БЕСЩЕТОЧНЫЙ ВОЗБУДИТЕЛЬ ПЕРЕМЕННОГО ТОКА
1. БЕСЩЕТОЧНЫЙ ВОЗБУДИТЕЛЬ ПЕРЕМЕННОГО ТОКА В системе возбуждения переменного тока основной силовой выпрямитель питает промежуточный возбудитель переменного тока. Этот возбудитель переменного тока содержит внутренний силовой выпрямитель, который питает обмотку возбуждения синхронной машины.
Ниже показана однолинейная схема вращающегося возбудителя переменного тока.
1.2. ВОЗБУДИТЕЛЬ ПОСТОЯННОГО ТОКАВ системе возбуждения постоянного тока силовой выпрямитель питает промежуточный возбудитель постоянного тока, который, в свою очередь, питает обмотку возбуждения синхронной машины.
Ниже показана однолинейная схема вращающегося возбудителя постоянного тока.
2. СТАТИЧЕСКИЕ СИСТЕМЫ ВОЗБУЖДЕНИЯ – ТЕРМИНАЛ-ФЭДВ статических системах возбуждения силовой выпрямитель напрямую питает обмотку возбуждения синхронной машины. Пилотного возбудителя нет.
Статическая система возбуждения питается от терминала (также называемого питанием от шины), когда питание берется от самой машины через силовой трансформатор напряжения (PPT). Первичная часть PPT подключена к статору машины, а вторичная подает питание на выпрямитель.
Первичная часть PPT подключена к статору машины, а вторичная подает питание на выпрямитель.
Системы статического возбуждения не являются самовозбуждающимися по своей природе, поэтому им требуется внешнее питание для запуска процесса возбуждения и создания достаточного магнитного потока. Этот процесс называется миганием поля .
2.1. ПРЕИМУЩЕСТВА СТАТИЧЕСКИХ СИСТЕМ ВОЗБУЖДЕНИЯСтатические системы возбуждения обладают рядом преимуществ, которые делают их привлекательным вариантом для управления синхронными машинами:
- Простая, надежная и экономичная конструкция
- Минимальные требования к обслуживанию
- Высокая производительность и быстрый отклик
Основные компоненты системы статического возбуждения перечислены ниже:
2.2.1. АВТОМАТИЧЕСКИЙ РЕГУЛЯТОР НАПРЯЖЕНИЯ (АРН)
Автоматический регулятор напряжения (АРН), широко известный просто как регулятор напряжения, выполняет все функции управления системой, включая следующие:
- Выключатели
- Отправка импульсов запуска на мосты
- Реагирование на команды оператора или нарушения сети
- Мониторинг операций ввода-вывода системы и принятие соответствующих мер в ответ на них
- Поддержание системы возбуждения в пределах безопасности и стабильности за счет использования ограничителей и средств защиты
- Выдача уведомлений в систему SCADA завода при возникновении аномальных условий
- Отключение системы возбуждения при возникновении критического отказа или опасного состояния
Основные элементы АРН:
- Контур управления
- Ограничители
- Стабилизатор системы питания
Решения по управлению с резервированием широко распространены. В конфигурации с резервированием имеется два регулятора напряжения, один из которых выполняет функции управления, а другой находится в режиме горячего резерва .
В конфигурации с резервированием имеется два регулятора напряжения, один из которых выполняет функции управления, а другой находится в режиме горячего резерва .
2.2.2. СИЛОВОЙ ВЫПРЯМИТЕЛЬ
Системы статического возбуждения обычно используют силовой выпрямитель, который преобразует переменный ток в постоянный и обеспечивает управляемый ток возбуждения для синхронной машины. Силовые выпрямители обычно используют тиристорную или IGBT-технологию.
Тепловыделение является проблемой для силового выпрямителя. Для мостового охлаждения обычно предоставляются резервные комплекты вентиляторов.
Конфигурации моста с резервированием являются общими. В случае наличия нескольких мостов система возбуждения выполнит выравнивание тока , чтобы сбалансировать выходы моста.
2.2.3. ИНТЕРФЕЙС ПРЕОБРАЗОВАТЕЛЯ
Интерфейс преобразователя состоит из всех промежуточных устройств между контроллером и силовым выпрямителем. Он преобразует сигнал управления в импульсы запуска и изолирует управляющую электронику от силовой части.