Винтовая пара: Винтовая пара устройство, принцип работы
alexxlab | 26.02.2023 | 0 | Разное
Винтовая передача
16.05.2017Здравствуйте, друзья!
Давно собирался написать статью о таком распространенном узле трения, как винтовая передача и смазочных материалах для неё.
В чём особенность этого узла трения? Главный фактор, определяющий особенности работы винтовой пары, это граничный режим трения. Граничное трение создает условия для возникновения задира. Задир в паре винт-гайка приводит к износу этих деталей и увеличению осевого и радиального зазора в ней. Учитывая важность кинематической точности винтовой передачи, которая используется, как правило, в механизмах перемещения рабочих органов станков, защита от износа и задира выступает важнейшим требованием к смазочному материалу.
Рис. 1 Винтовая передача. Пара винт-гайкаВинтовые пары станочного оборудования смазываются различными способами. «Великовозрастные» универсальные токарно-винторезные станки с незапамятных времён, как правило, смазываются индустриальными маслами, которые служат универсальным смазочным материалом «на все случаи жизни».
Для повышения точности и износостойкости винтовых передач производитель современного оборудования широко применяет шарико-винтовые передачи (ШВП), в которых трение скольжения заменено на трение качения. На рисунке 2 показана шарико-винтовая передача фрезерного станка с ЧПУ.
Рис. 2 Шарико-винтовая передачаОбсудим теперь, чем же смазывать винтовые и шарико-винтовые передачи. Кстати, смазки для них требуются принципиально различные. Обусловлено это вышеупомянутыми режимами трения. Винтовая передача, построенная на паре винт-гайка, работает с трением скольжения. Шарико-винтовая передача работает с трением качения.
Заметим, что пара винт-гайка по характеру трения близка к подшипнику скольжения. В то время как шарико-винтовая передача напоминает шариковый подшипник качения. Значит, принцип подбора смазки винтовых передач аналогичен подбору смазок для подшипников.
Итак, для шарико-винтовых передач требуются «чистые» смазки без твёрдых смазочных добавок в виде графита, дисульфида молибдена и т.п. Оптимальная вязкость базового масла с учётом скоростей и механических нагрузок в ШВП – 220 сСт при 40⁰С. Обязательно наличие противоизносных и противозадирных присадок, которые обеспечивают стойкость против износа ШВП. В характеристике смазок, легированных противозадирными присадками, это указывается в виде аббревиатуры
Рассмотрим на примере продукции российской компании АРГО смазки для ШВП. Для данного применения оптимально подходит смазка Elit HD EP2 на литиевом загустителе и минеральном базовом масле 220 сСт. Вот её характеристики:
Для данного применения оптимально подходит смазка Elit HD EP2 на литиевом загустителе и минеральном базовом масле 220 сСт. Вот её характеристики:
|
Характеристика |
Метод |
ARGO Elit HD EP2 |
|
Загуститель |
– |
Lithium |
|
Диапазон рабочих температур, ºС |
– |
-30..+130 |
|
Классификация смазок |
DIN 51502 |
KP2K-30 |
|
Цвет смазки |
Визуально |
Коричневый |
|
Класс консистенции NLGI |
DIN 51 818 |
2 |
|
Пенетрация 0,1 мм |
DIN ISO 2137 |
265-295 |
|
Вязкость базового масла при 40ºС, мм2/с |
DIN 51562-1 |
220 |
|
Температура каплепадения, ºС |
DIN ISO 2176 |
190 |
|
Нагрузка сваривания, Н |
DIN 51350 |
2930 |
Не стоит, однако, исключать и дополнительные факторы. Винтовая передача может, например, работать в контакте со смазочно-охлаждающей жидкостью (СОЖ) на водно-эмульсионной основе. В этом случае требуется смазка с повышенной водостойкостью. Обычно это смазки на кальциевом или литиево-кальциевом загустителе. Компания АРГО для этих условий рекомендует нам смазку ElitCa 220 EP2. Она идеально подходит как для влажных условий, так и для сухих.
Винтовая передача может, например, работать в контакте со смазочно-охлаждающей жидкостью (СОЖ) на водно-эмульсионной основе. В этом случае требуется смазка с повышенной водостойкостью. Обычно это смазки на кальциевом или литиево-кальциевом загустителе. Компания АРГО для этих условий рекомендует нам смазку ElitCa 220 EP2. Она идеально подходит как для влажных условий, так и для сухих.
Наряду с ШВП по-прежнему встречаются винтовые передачи на основе пары винт-гайка. Трение скольжения в таких парах определяет использование в смазках модификаторов трения, предотвращающих задир при высоких нагрузках и низких скоростях. В качестве смазочного материала обычно используются смазки с твёрдыми смазочными добавками в виде графита или дисульфида молибдена. Эти смазки легко отличить по цвету, который варьирует от тёмно-серого до черного. Смазки на основе графита стоят более дёшево, но менее эффективны.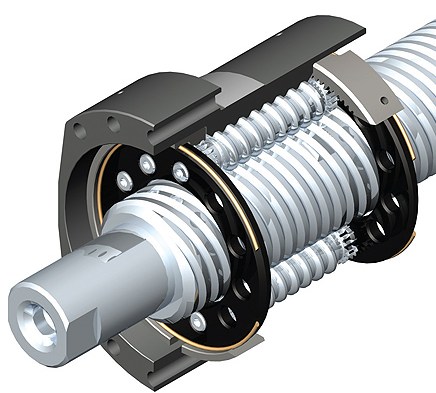 Смазки с добавлением дисульфида молибдена хотя и дороже, но их трибологические свойства значительно выше графитных смазок.
Смазки с добавлением дисульфида молибдена хотя и дороже, но их трибологические свойства значительно выше графитных смазок.
В качестве примера рассмотрим смазку с добавкой дисульфида молибдена ARGO Elit M EP2. Вот её характеристики:
|
Характеристика |
Метод |
ARGO Elit M EP2 |
|
Загуститель |
– |
Lithium |
|
Содержание MoS2, % |
|
3 |
|
Диапазон рабочих температур, ºС |
– |
-30. |
|
Классификация смазок |
DIN 51502 |
KPF2K-30 |
|
Цвет смазки |
Визуально |
Темно-серый |
|
Класс консистенции NLGI |
DIN 51 818 |
2 |
|
Пенетрация 0,1 мм |
DIN ISO 2137 |
265-295 |
|
Вязкость базового масла при 40ºС, мм2/с |
DIN 51562-1 |
150 |
|
Температура каплепадения,ºС |
DIN ISO 2176 |
190 |
|
Нагрузка сваривания, Н |
DIN 51350 |
3920 |
 .+130
.+130Несмотря на простоту принципа подбора, вопрос не следует упрощать, помня о том, что любые твёрдые смазочные добавки это кристаллические вещества, которые при высоких скоростях способны создавать абразивный эффект.
Однако «железно» привязываться к конкретным смазкам тоже не следует. Ведь главное, знать какими свойствами смазочный материал должен обладать. Зная требования производителя оборудования, подобрать смазочный материал будет не сложно. Но как производитель оборудования формулирует свои эксплуатационные требования? Всё очень просто: уважающий себя производитель требования к смазкам выражает в виде буквенно-цифрового кода по классификации DIN 51502 или ISO 12924.
Рассмотрим примеры кодификации смазок. Вот пример наиболее распространённого типа смазки для винтовых передач по DIN 51502:
Расшифруем его:
К – смазка для подшипников качения и скольжения,
Р – смазка содержит противоизносные и противозадирные присадки,
2 – класс консистенции по NLGI, который характеризует смазку как мягкую,
К – максимальная рабочая температура до +120⁰С,
-30 – минимальная температура использования минус 30⁰С.
Из расшифровки типа смазки видно, что это «чистая» смазка без добавок, которая предназначена для смазывания всех шарико-винтовых, а также высокоскоростных гаечно-винтовых передач. Кстати, приведенная выше смазка ARGO Elit HD EP2 соответствует этому типу.
А вот пример типа смазки для тихоходных передач винт-гайка:
KPF2K-30
К – смазка для подшипников качения и скольжения,
Р – смазка содержит противоизносные и противозадирные присадки,
F – в составе смазки содержатся твёрдые смазочные добавки,
2 – класс консистенции по NLGI, который характеризует смазку как мягкую,
К – максимальная рабочая температура до +120⁰С,
-30 – минимальная температура использования минус 30⁰С.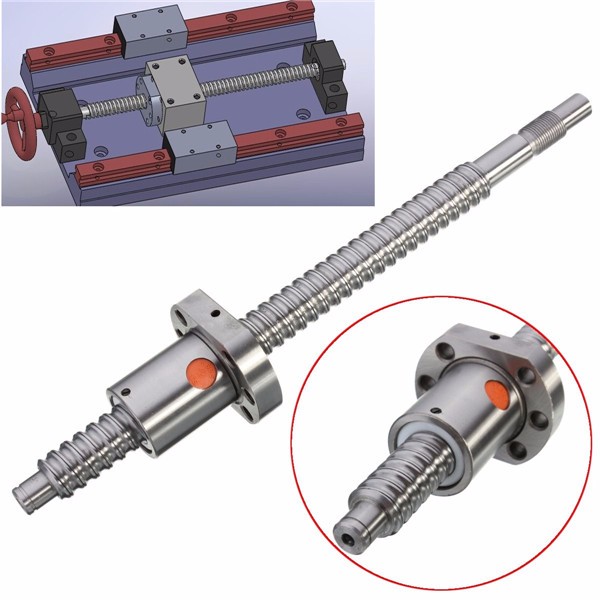
Этому типу как раз соответствует смазка ARGO Elit M EP2.
На этом статью завершаю и приглашаю к диалогу вопрос-ответ на конкретных примерах. Напоминаю свой e-mail: [email protected] .
Смазки из статьи:
Elit HD ElitCa 220 Elit M
До новых встреч на страницах блога!
Отличия ШВП (шариковая винтовая передача), РВП (ролико-винтовая) и зубчатой рейки
ШВП и ходовые винты наиболее часто применяются при строительстве станков. Во многих случаях эти передачи не взаимозаменяемы, и встает вопрос поиска компромисса между точностью, жесткостью и нагрузочной способности. Причем очень часто сухие цифры спецификаций не помогают сформировать представление о функциональности той или иной передачи, чтобы сделать выбор. Ниже некоторые специалисты ведущих машиностроительных компаний мира постараются поделиться своим мнением, основанным на живом опыте.
Ниже некоторые специалисты ведущих машиностроительных компаний мира постараются поделиться своим мнением, основанным на живом опыте.
В машиностроении наиболее часто применяются 3 вида передачи: ШВП, ходовые метрические или трапецеидальные винты и зубчатая рейка (ролико-винтовые передачи). Между ними есть существенные различия. Ходовые трапецеидальные винты базируются на трении скольжения, имеют большую площадь контакта и как следствие – высокую жесткость и грузоподъемность, но очень низкий КПД. Высокое трение также ограничивает скорость передачи. Шарико-винтовые передачи обладают высоким КПД благодаря трению качения. Это позволяет достичь достаточно высоких скоростей, однако жесткость ШВП значительно уступает трапецеидальному винту, и грузоподъемность ШВП тоже намного ниже, чем у ходового винта аналогичного размера – площадь контакта шариков с беговой дорожкой меньше, чем у трапецеидальной резьбы.
Планетарная ролико-винтовая передача (зубчатая рейка для ЧПУ) объединяет в себе плюсы вышеупомянутых передач. Зубчатая рейка РВП обладает большой площадью контакта между резьбой роликов и резьбой винта, что означает больший ресурс и грузоподъемность, чем у ШВП, а также значительно большую жесткость. Поскольку ролики разъединены кольцом по типу планетарной передачи, они не обладают паразитным взаимным трением, как шарики в ШВП(соседние шарики в канале гайки ШВП крутятся навстречу друг другу), и это дает возможность достигать больших угловых скоростей и ускорений винта. И все это – без существенных потерь КПД, так как ролики все же используют трение качения для перемещения по резьбе винта.
Зубчатая рейка РВП обладает большой площадью контакта между резьбой роликов и резьбой винта, что означает больший ресурс и грузоподъемность, чем у ШВП, а также значительно большую жесткость. Поскольку ролики разъединены кольцом по типу планетарной передачи, они не обладают паразитным взаимным трением, как шарики в ШВП(соседние шарики в канале гайки ШВП крутятся навстречу друг другу), и это дает возможность достигать больших угловых скоростей и ускорений винта. И все это – без существенных потерь КПД, так как ролики все же используют трение качения для перемещения по резьбе винта.
Джон Уокер. Вице-президент Exlar.
Всему свое место
Ключевое отличие между ШВП и ходовыми винтами – в том, как нагрузка передается между движущимися поверхностями. ШВП используют рециркулирующие шарики для снижения трения и увеличения КПД, тогда как передача винт-гайка использует трение между резьбами, и, соответственно, никак не может достигнуть эффективности шарико-винтовой пары, КПД которой достигает 90% и выше. Обратившись к трибологии, можно сделать вывод, что трение скольжения по сути своей гораздо хуже поддается расчетам на ресурс, чем передача энергии с использованием шариков(уравнения для усталостной долговечности достаточно репрезентативны). Отсюда, есть фундаментальное отличие в применении ходовых винтов и ШВП – в предсказуемости КПД и ресурса передачи. Однако преимущества ШВП – нагрузочная способность, жесткость, КПД, прогнозируемость – имеют и противовес. Несмотря на то, что отношение цена/качество у шариковых пар весьма высоко, они сложны в производстве, требуют закаленной и прецизионной, качественно обработанной поверхности винта и механизма циркуляции шариков, тогда как передача винт-гайка компактна, проста в монтаже, бесшумна, достаточно устойчива к коррозии и обладает свойством самоторможения (при вертикальном перемещении).
Обратившись к трибологии, можно сделать вывод, что трение скольжения по сути своей гораздо хуже поддается расчетам на ресурс, чем передача энергии с использованием шариков(уравнения для усталостной долговечности достаточно репрезентативны). Отсюда, есть фундаментальное отличие в применении ходовых винтов и ШВП – в предсказуемости КПД и ресурса передачи. Однако преимущества ШВП – нагрузочная способность, жесткость, КПД, прогнозируемость – имеют и противовес. Несмотря на то, что отношение цена/качество у шариковых пар весьма высоко, они сложны в производстве, требуют закаленной и прецизионной, качественно обработанной поверхности винта и механизма циркуляции шариков, тогда как передача винт-гайка компактна, проста в монтаже, бесшумна, достаточно устойчива к коррозии и обладает свойством самоторможения (при вертикальном перемещении).
Роберт Липсетт, Thomson BSA/Danaher motion
Сравним?
Фундаментальное различие заключается в том, что в ШВП имеются шарики, благодаря которым в передаче отсутствует трение скольжения, в отличие от обычных винтов подач. Ниже кратко попробуем перечислить плюсы и минусы ШВП:
Ниже кратко попробуем перечислить плюсы и минусы ШВП:
- меньшая диссипация энергии, т.е. меньшие теплопотери, и как следствие:
- большой КПД(90%, и более, в зависимости от угла подъема беговых дорожек)
- требуется мотор меньшей мощности
- суммарная стоимость владения системой на ШВП за счет большей износостойкости, надежности, высокого КПД – в результате оказывается меньше, чем на трапецеидальных винтах
- а вот стоимость приобретения ШВП – выше
- ШВП лучше подходят для приложений, где требуется высокая производительность(высокие скорости и ускорения, большое кол-во циклов и т.п.)
- Не является самотормозящейся передачей, т.е. способная передавать усилия в обратном направлении – с гайки на вал двигателя. Как следствие:
- Есть проблемы при ипользовании ШВП в вертикальных перемещениях. Зачастую требуются противовесы и/или тормоз нагрузки, для предотвращения падения.

- Обычно ШВП заметно точнее ходовых винтов одной ценовой категории
- Отсутствует “эффект страгивания”(характерный “рывок”, проскальзывание в момент начала движения, который свойственен передачам и направляющим с трением скольжения).

Классические передачи винт-гайка базируются на трении скольжения и обладают следующими свойствами:
- Повышенный нагрев области контакта
- Низкий КПД, около 50%, как следствие:
- требуется намного более мощный мотор
- Стоимость владения за счет мощного привода, повышенного износа, низких скоростей и т.п. – выше, чем у ШВП
- Низкая стоимость приобретения
- Малая производительность – максимально достижимые скорости невысоки, идет повышенный износ и т.п.
- Самотормозащаяся передача
- Хорошо подходит для перемещения нагрузки в вертикальном направлении
- Меньшая точность, чем у ШВП аналогичной ценовой категории
- Характерен вышеупомянутый “эффект страгивания”.

Клинт Хэйз, маркетинг-менеджер по направлению ШВП. Bosch Rexroth
Это ж-ж-ж – неспроста
Все знают, что трапецеидальные винты обладают низким КПД 40-50%, тогда как ШВП – порядка 90-95. Стоимость дополнительных ваттов мощности привода для более дешевых ходовых винтов – плата за экономию на ШВП, и вполне возможно, что ШВП все же окажется в результате дешевле, ведь ходовые винты приходится менять гораздо чаще – а это и стоимость собственно передачи, и простой станка, упущенная выгода. Из-за трения скольжения ходовые винты генерируют избыточное тепло, и сильно уступают ШВП в повторяемости. Вдобавок, пусть некоторые винты и выпускаются с точностью C5, продукция может вовсе не отвечать заявленным параметрам – трение скольжения медленно, но верно “стирает” всю точность передачи. ШВП гораздо эффективней трапецеидальных винтов в широком спектре приложений. Однако, плавность ШВП имеет и обратную сторону – она не самотормозящаяся. Так что трение скольжение как минимум в этом аспекте играет на руку ходовым винтам – они часто более предпочтительны, если перемещение идет вертикально. Суммируя, можно сказать, что в задачах, где критичны габариты, не требуется высокой точности, больших скоростей, нужно самоторможение – трапецеидальные винты справятся хорошо. Однако, всегда надо помнить, что экономия на стоимости передачи – палка о двух концах, ведь передача с трением скольжения, будучи дешевле ШВП, потребует дополнительных расходов на мощный привод, электроэнергию, простои оборудования во время более частого техобслуживания.
Так что трение скольжение как минимум в этом аспекте играет на руку ходовым винтам – они часто более предпочтительны, если перемещение идет вертикально. Суммируя, можно сказать, что в задачах, где критичны габариты, не требуется высокой точности, больших скоростей, нужно самоторможение – трапецеидальные винты справятся хорошо. Однако, всегда надо помнить, что экономия на стоимости передачи – палка о двух концах, ведь передача с трением скольжения, будучи дешевле ШВП, потребует дополнительных расходов на мощный привод, электроэнергию, простои оборудования во время более частого техобслуживания.
Дэн Пассеро, менеджер по развитию, NSK Precision America
Еще раз о различиях
В общем смысле, шариковая винтовая передача ШВП, зубчатая рейка РВП и трапецеидальные винты – все это передачи типа “винт-гайка”. Однако, чтобы правильно применять их, необходимо иметь четкое представление об их различиях. Шарико-винтовые передачи используют специальную резьбу – в виде беговых дорожек для шариков, сделанных на поверхности стального вала. Гайка ШВП, в свою очередь, имеет аналогичные беговые дорожки на своем корпусе, сделанные таким образом, чтобы шарики, циркулирующие в них, с одной стороны сидели в канале жестко, а с другой – легко передавали усилия с дорожек винта на гайку. Ходовые винты используют трапецеидальную резьбу(изобретенную, кстати, уже более 100 лет назад), в них усилия передаются за счет трения скольжения, с контактирующих поверхностей резьб винта и гайки. В ролико-винтовой паре принцип аналогичен ШВП, только усилия передаются с гайки на винт через набор роликов, которые могут вращаться вокруг своей оси. Так достигается значительно большая площадь контакта гайки с винтом, что и обуславливает большую нагрузочную способность РВП.
Гайка ШВП, в свою очередь, имеет аналогичные беговые дорожки на своем корпусе, сделанные таким образом, чтобы шарики, циркулирующие в них, с одной стороны сидели в канале жестко, а с другой – легко передавали усилия с дорожек винта на гайку. Ходовые винты используют трапецеидальную резьбу(изобретенную, кстати, уже более 100 лет назад), в них усилия передаются за счет трения скольжения, с контактирующих поверхностей резьб винта и гайки. В ролико-винтовой паре принцип аналогичен ШВП, только усилия передаются с гайки на винт через набор роликов, которые могут вращаться вокруг своей оси. Так достигается значительно большая площадь контакта гайки с винтом, что и обуславливает большую нагрузочную способность РВП.
Производители ШВП указывают данные для статической и динамической осевой грузоподъемности, и точности шага винта. Динамическая грузоподъемность характеризует диапазон нагрузок, при которых винт отходит расчетный ресурс, а точность шага характеризует прежде всего точность всей передачи. Винты ШВП делятся на 2 больших класса – катаные и шлифованные. Шлифованные дороже, точнее, сложнее в производстве, чем катаные.
Винты ШВП делятся на 2 больших класса – катаные и шлифованные. Шлифованные дороже, точнее, сложнее в производстве, чем катаные.
РВП в большинстве случаев имеют намного большую динамическую грузоподъемность, чем ШВП. Винты РВП как правило все шлифованные и высокопрецизионные, и естественно, роликовые передачи – наиболее дорогие. Трапецеидальные винты обычно самые дешевые, но обладают множеством недостатков, в том числе точность передачи винт-гайка падает со временем из-за износа трущихся поверхностей.
Также надо обращать внимание на следующий момент: точность и повторяемость передачи часто путают. Вполне может быть, что передача обладает высокой повторяемостью, но малой точностью. Шлифованные РВП и ШВП обладают обычно и высокой точностью, и высокой повторяемостью. Следует хорошо изучить все характеристики конкурирующих передач, чтобы не ошибиться в выборе при проектировании станка – завышенные или заниженные требования при составлении техзадания могут привести к излишнему завышению себестоимости продукта или невозможностью достичь заданных характеристик.
Гэри Розенгрен, директор по производству, Tolomatic
Автор: Алексей Воробьев, Darxton.ru.
кинематическая пара | Ссылка | Определение и типы с изображениями
Теория машин
Написать комментарий к записи Кинематическая пара | Ссылка | Определение и типы с изображениями
Содержание
Что такое кинематическая пара?Прежде чем перейти к определению кинематической пары, давайте сначала разберемся с определением звена.
Сопротивляющееся тело или группа устойчивых тел с жесткими соединениями, препятствующими их относительному движению, называется звеном.
звенья можно классифицировать на основе их концов, на которых могут быть размещены поворотные пары.
Теперь можно перейти к определению кинематической пары.
Кинематическая пара или просто пара – это соединение двух звеньев, имеющих относительное движение между собой.
Типы кинематических парКинематические пары можно классифицировать по следующим трем критериям
- Характер контакта
- Природа механического ограничения
- Природа относительного движения
Нижняя пара
Пара звеньев, имеющая поверхностный или площадной контакт между своими элементами, называется нижней парой.
Старшая пара
Пара звеньев, имеющая линейный или точечный контакт между своими элементами, называется высшей парой.
Кинематические пары по характеру механической связиЗамкнутая пара
Пара звеньев, в которой контакт между звеньями может быть разорван разрушением хотя бы одного из звеньев, называется замкнутой парой.
Незамкнутая пара
Пара звеньев, находящихся в контакте под действием силы тяжести или действия пружины, называется незамкнутой парой.
Кинематические пары по характеру относительного движенияСкользящая пара
Пара звеньев, совершающих скользящее движение относительно друг друга, называется скользящей парой.
Поворотная пара
Пара звеньев, совершающих вращательное или вращательное движение относительно друг друга, называется поворотной парой.
Пара качения
Пара звеньев, совершающих качение относительно друг друга, называется парой качения.
Винтовая пара (винтовая пара)
Пара звеньев, совершающих как вращательное, так и скользящее движение относительно друг друга, называется винтовой или винтовой парой.
Сферическая пара
Когда одно звено в виде сферы повернуто внутри неподвижного звена, это сферическая пара.
Источник изображения для типов относительного движения
Глава 4. Основы кинематики твердых тел со связями
с
Сьюзен Фингер
Стефанни Беренс
Содержание
4.1 Степени свободы твердого тела
4.1.1 Степени свободы твердого тела на плоскости
Определены степеней свободы (степеней свободы) твердого тела
как количество независимых движений, которые он имеет. Рисунок 4-1
изображено твердое тело на плоскости. Определить степень свободы этого тела
мы должны рассмотреть, сколькими различными способами можно перемещать планку. В
двумерная плоскость, такая как этот экран компьютера, есть 3 степени свободы.
Бар может быть переведено по оси x , переведено
вдоль оси и , а повернулся на вокруг своего центра тяжести.
Рисунок 4-1 Степени свободы твердого тела на плоскости
4.1.2 Степени свободы твердого тела в пространстве
Незакрепленное твердое тело в космосе имеет шесть степеней свободы: три поступательных движения вдоль x , y и z осей и три вращательных движения вокруг х , и и оси и соответственно.
Рисунок 4-2 Степени свободы твердого тела в пространстве
4.2 Кинематические ограничения
Два или более твердых тела в космосе вместе называются твердыми телами . система кузова . Мы можем воспрепятствовать движению этих независимых жестких тела с кинематическими связями . Кинематическая ограничения — это ограничения между твердыми телами, которые приводят к уменьшение степеней свободы системы твердых тел.
Термин «кинематическая пара» на самом деле относится к кинематические связи между твердыми телами. Кинематические пары
делятся на младшие пары и высшие пары, в зависимости от того, как
тела соприкасаются.
Кинематические пары
делятся на младшие пары и высшие пары, в зависимости от того, как
тела соприкасаются.
4.2.1 Нижние пары в планарных механизмах
В планарных механизмах есть два типа нижних пар: вращательные пары и призматические пары.
Твердое тело на плоскости совершает только три независимых движения — два поступательный и один вращательный – поэтому введение либо вращательной пары или призматическая пара между двумя твердыми телами удаляет две степени свобода.
Рисунок 4-3 Плоская вращающаяся пара (R-пара)
Рисунок 4-4 Плоская призматическая пара (P-пара)
4.2.2 Нижние пары в пространственных механизмах
Есть шесть видов нижних пар в категории пространственных механизмов. Типы: сферическая пара, плоская пара, цилиндрическая пара, вращающаяся пара, призматическая пара и винтовая пара.
Рисунок 4-5 Сферическая пара (S-пара)
Сферическая пара удерживает вместе два сферических центра. Два
твердые тела, связанные этой связью, смогут повернуть относительно осей x , y и z ,
но не будет относительного перевода по любому из этих
оси. Следовательно, сферическая пара лишает три степени свободы в
пространственный механизм. степеней свободы = 3 .
Два
твердые тела, связанные этой связью, смогут повернуть относительно осей x , y и z ,
но не будет относительного перевода по любому из этих
оси. Следовательно, сферическая пара лишает три степени свободы в
пространственный механизм. степеней свободы = 3 .
Рисунок 4-6 Плоская пара (E-пара)
Пара плоскостей удерживает вместе поверхности двух твердых тел. Чтобы визуализировать это, представьте книгу, лежащую на столе, где она может двигаться. в любом направлении, кроме как от стола. Два твердых тела, соединенных такая пара будет иметь два независимых поступательных движения в плоскость и вращательное движение вокруг оси, перпендикулярной к самолету. Следовательно, плоская пара удаляет три степени свобода пространственного механизма. В нашем примере книги не будет. в состоянии подняться со стола или повернуться в стол. ГРИП = 3.
Рисунок 4-7 Цилиндрическая пара (C-пара)
Цилиндрическая пара удерживает две оси двух твердых тел
выровнены. Два твердых тела, являющиеся частью такой системы, будут
имеют независимое поступательное движение вдоль оси и относительное
вращательное движение вокруг оси. Следовательно, цилиндрическая пара удаляет
четыре степени свободы от пространственного механизма. ГРИП = 2.
Два твердых тела, являющиеся частью такой системы, будут
имеют независимое поступательное движение вдоль оси и относительное
вращательное движение вокруг оси. Следовательно, цилиндрическая пара удаляет
четыре степени свободы от пространственного механизма. ГРИП = 2.
Рисунок 4-8 Вращающаяся пара (R-пара)
Вращающаяся пара удерживает оси двух твердых тел. все вместе. Два твердых тела, скрепленные вращательной парой, имеют независимое вращательное движение вокруг общей оси. Следовательно, вращающаяся пара убирает пять степеней свободы в пространственном механизм. ГРИП = 1.
Рисунок 4-9 Призматическая пара (P-пара)
Призматическая пара удерживает две оси двух твердых тел на одной линии и
не допускать относительного вращения. Два твердых тела, ограниченные этим видом
связи сможет иметь независимое поступательное движение
вдоль оси. Следовательно, призматическая пара удаляет пять степеней
свобода пространственного механизма. ГРИП = 1.
ГРИП = 1.
Рисунок 4-10 Винтовая пара (H-пара)
Пара винтов удерживает две оси двух твердых тел на одной линии и допускает относительное винтовое движение. Два твердых тела, ограниченные винтовая пара движение, составляющее поступательное движение вдоль оси и соответствующее вращательное движение вокруг оси. Следовательно, винтовая пара убирает пять степеней свободы в пространстве. механизм.
4.3 Закрепленные твердые тела
Твердые тела и кинематические связи являются основными компонентами механизмы. Ограниченная система твердых тел может быть кинематической цепью, механизмом, конструкцией или ничем из этого. Влияние кинематических связей на движение твердых тел имеет два внутренних аспекта: геометрический и физический. аспекты. Другими словами, мы можем анализировать движение ограниченного твердые тела из их геометрических взаимосвязей или с помощью второго закона Ньютона.
Механизм – это система твердых тел со связями, в которой один из
тела является каркасом. Степени
свободы важны при рассмотрении системы жесткого тела с ограничениями
это механизм. Это менее важно, когда система представляет собой
структуры или когда она не имеет определенного движения.
Степени
свободы важны при рассмотрении системы жесткого тела с ограничениями
это механизм. Это менее важно, когда система представляет собой
структуры или когда она не имеет определенного движения.
Вычисление степеней свободы системы твердых тел происходит прямо вперед. Любое неограниченное твердое тело имеет шесть степеней свободы. пространство и три степени свободы на плоскости. Добавление кинематики связи между твердыми телами соответственно уменьшат Степени свободы системы твердых тел. Мы обсудим больше на эта тема для планарных механизмов в следующем разделе.
4.4 Степени свободы планарных механизмов
4.4.1 Уравнение Грюблера
Определение степеней свободы механизма – количество независимых относительных движений между твердыми телами. Например, на рис. 4-11 показаны несколько случаев твердое тело, ограниченное разного рода парами.
Рисунок 4-11 Твердые тела, ограниченные различными типами плоских пар
На рис. 4-11а твердое тело ограничено вращательной парой, которая допускает только вращательное движение.
движение вокруг оси. Имеет одну степень свободы, поворачивается
точка А. Две потерянные степени свободы — это поступательные движения
вдоль 9Оси 0157 x и y . Единственный способ, которым твердое тело может
перемещение — это вращение вокруг фиксированной точки A.
4-11а твердое тело ограничено вращательной парой, которая допускает только вращательное движение.
движение вокруг оси. Имеет одну степень свободы, поворачивается
точка А. Две потерянные степени свободы — это поступательные движения
вдоль 9Оси 0157 x и y . Единственный способ, которым твердое тело может
перемещение — это вращение вокруг фиксированной точки A.
На рис. 4-11b твердое тело ограничено призматической парой, которая позволяет только поступательное движение. В двух измерениях он имеет одну степень свобода, перемещаясь по оси x . В этом примере тело утратило способность вращаться вокруг какой-либо оси, и оно не может двигаться вдоль оси y .
На рис. 4-11c твердое тело ограничено высшей парой. Имеет две степени свобода: перемещение по криволинейной поверхности и поворот вокруг мгновенная точка контакта.
В общем случае твердое тело на плоскости имеет три степени свободы.
Кинематические пары — это ограничения на твердые тела, которые уменьшают
степени свободы механизма. На рис. 4-11 показаны три вида
пар в планарных механизмах. Эти
пары уменьшают количество степеней
свободы. Если мы создадим нижнюю пару
(рис. 4-11а,б), количество степеней свободы уменьшается до 2. Аналогично,
если мы создадим высшую пару (рис.
4-11в), количество степеней свободы уменьшено до 1.
На рис. 4-11 показаны три вида
пар в планарных механизмах. Эти
пары уменьшают количество степеней
свободы. Если мы создадим нижнюю пару
(рис. 4-11а,б), количество степеней свободы уменьшается до 2. Аналогично,
если мы создадим высшую пару (рис.
4-11в), количество степеней свободы уменьшено до 1.
Рисунок 4-12 Кинематические пары в планарных механизмах
Следовательно, мы можем написать следующее уравнение:
Где
- F = общее количество степеней свободы в механизме
- n = количество ссылок (включая рамка)
- l = количество нижних пар (одна степень свободы)
- ч = количество старших пар (две степени свободы)
- n = количество ссылок (включая рамка)
Это уравнение также известно как уравнение Грюблера 9.0159 .
Пример 1
Посмотрите на фрамугу над дверью на рис. 4-13а. Открытие и закрывающий механизм показан на рис. 4-13b. Давайте посчитаем его степень свободы.
Рисунок 4-13 Механизм транца
n = 4 (звено 1,3,3 и кадр 4), l = 4 (в точках A, B, C, D), h = 0
Примечание: D и E функционируют как одна призматическая пара, поэтому они только
считаются одной нижней парой.
Пример 2
Рассчитайте степени свободы механизмов, показанных на рис. 4-14b. Рисунок 4-14a представляет собой приложение механизма.
Рисунок 4-14 Самосвал
n = 4, l = 4 (в точках A, B, C, D), h = 0
Пример 3
Рассчитайте степени свободы механизмов, показанных на рис. 4-15.
Рисунок 4-15 Расчет степеней свободы
Для механизма на рис. 4-15а
п = 6, л = 7, ч = 0
Для механизма на рис. 4-15b
п = 4, л = 3, ч = 2
Примечание: Вращение ролика не влияет на взаимосвязь входного и выходного движения механизма. Следовательно, свобода валика учитываться не будет; Это называется пассивный или резервный степень свободы. Представьте, что ролик приварен к звену 2 при подсчете градусов свободы механизма.
4.
 4.2 Критерий Куцбаха
4.2 Критерий КуцбахаКоличество степеней свободы механизма также называется мобильность устройства. мобильность количество входных параметров (обычно пара переменные), которые должны контролироваться независимо, чтобы устройство в определенную позицию. Критерий Куцбаха , которое аналогично уравнению Грюблера, вычисляет мобильность .
Для управления механизмом количество независимых входов движения должны равняться числу степеней свободы механизма. Например, транец на рис. 4-13а имеет одну степень свободы, поэтому ему нужен один независимый вход движения, чтобы открыть или закрыть окно. То есть вы просто толкаете или тянете стержень 3 для управления окном.
Чтобы увидеть еще один пример, механизм на рис. 4-15а также имеет 1 степень свободы. Если независимый вход применяется к звену 1 ( например, , двигатель установлен на шарнире A для привода звено 1), механизм будет иметь заданное движение.
4.
 5 Конечное преобразование
5 Конечное преобразованиеКонечное преобразование используется для описания движения точки на твердое тело и движение самого твердого тела.
4.5.1 Конечное плоское вращательное преобразование
Рисунок 4-16 Точка на плоском твердом теле, повернутом на угол
Предположим, что точка P на твердом теле совершает поворот описывающий круговой путь от P 1 до P 2 вокруг начала системы координат. Мы можем описать это движение оператором вращения Р 12 :
куда
4.5.2 Конечный планарный поступательный Трансформация
Рисунок 4-17 Точка на плоском твердом теле, смещенная на расстояние
Предположим, что точка P на твердом теле проходит через
перевод, описывающий прямой путь от P 1 до P 2 с изменением координат (x, y). Мы можем описать это
движение с оператором перевода T 12 :
Мы можем описать это
движение с оператором перевода T 12 :
куда
4.5.3 Конкатенация конечных плоских перемещений
Рисунок 4-18 Конкатенация конечных плоских перемещений в пространстве
Предположим, что точка P на твердом теле совершает поворот описывающий круговой путь от P 1 до P 2 ‘ вокруг начала системы координат, затем перевод, описывающий прямой путь от P 2 ‘ до Р 2 . Мы можем представить эти два шага как
и
Мы можем объединить эти движения, чтобы получить
где D 12 — оператор плоского общего перемещения . :
4.5.4 Планарное преобразование твердого тела
Мы обсудили различные преобразования для описания
перемещения точки твердого тела.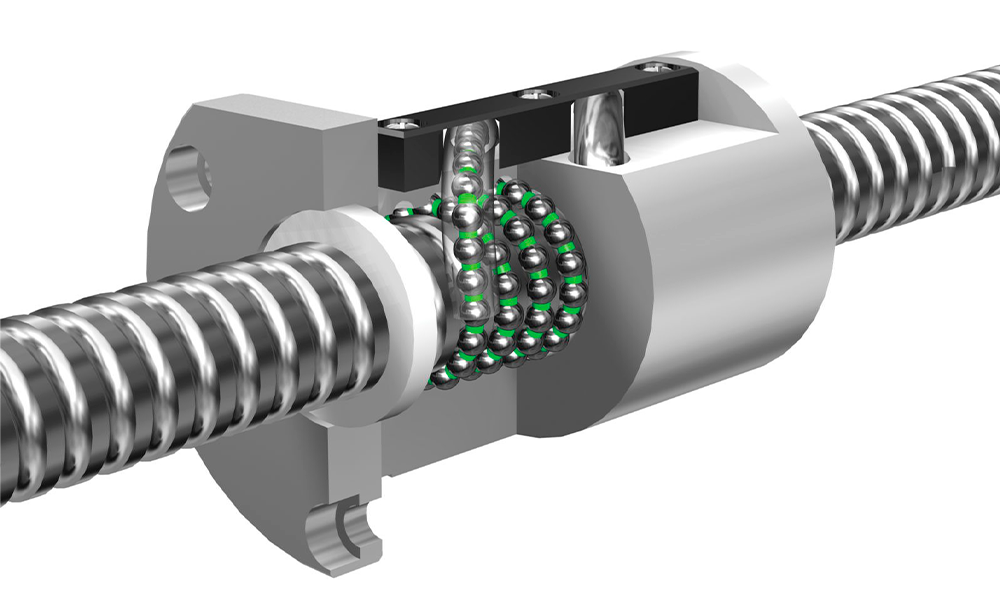 Могут ли эти операторы быть
применительно к перемещениям системы точек, такой как твердая
тело?
Могут ли эти операторы быть
применительно к перемещениям системы точек, такой как твердая
тело?
Мы использовали однородную матрицу-столбец 3 x 1 для описания вектора представляющий одну точку. Выгодная особенность планара 3 х 3 поступательные, вращательные и общие матричные операторы смещения заключается в том, что их можно легко запрограммировать на компьютере для управления 3 x n матрица из n векторов-столбцов, представляющих n точек твердого тела. Поскольку расстояние каждой частицы твердого тела от любой другой точка твердого тела постоянна, векторы, определяющие положение каждой точки твердого тела должно претерпевать такое же преобразование, когда твердое тело тело движется и задана правильная ось, угол и/или перемещение представлять его движение. (Сандор и Эрдман 84). Например, общее плоское преобразование за три очка A, B, C на жестком кузове можно изобразить от
4.5.5 Преобразование пространственного вращения
Мы можем описать оператор пространственного вращения для вращательного
преобразование точки относительно единичной оси u , проходящей через
начало системы координат. Предположим, угол поворота точки
о u есть ,
оператор вращения будет выражен как
Предположим, угол поворота точки
о u есть ,
оператор вращения будет выражен как
куда
- u x , u y , u z являются ортографическими
проекция оси агрегата u на x , y , и и осей соответственно.
- с = грех
- с = потому что
- v = 1 – потому что
- с = грех
4.5.6 Пространственное поступательное преобразование
Предположим, что точка P на твердом теле проходит через перевод, описывающий прямой путь от P 1 по P 2 с заменой координат (x, y, z), мы можем описать это движение с оператором перевода T :
4.5.7 Матрица пространственного перемещения и вращения для оси Через происхождение
Предположим, что точка P на твердом теле вращается под углом
перемещение относительно единичной оси u , проходящей через начало координат
сначала систему координат, а затем перевод D и по и . Этот состав этого вращательного
преобразование, и это трансляционное преобразование является винтом
движение. Соответствующий ему матричный оператор, винт оператор , является конкатенацией оператора перевода в уравнении 4-7 и оператора поворота в уравнении 4-9.
Этот состав этого вращательного
преобразование, и это трансляционное преобразование является винтом
движение. Соответствующий ему матричный оператор, винт оператор , является конкатенацией оператора перевода в уравнении 4-7 и оператора поворота в уравнении 4-9.
4.6 Матрица преобразования между твердыми телами
4.6.1 Матрица преобразования между двумя Arbitray Твердые тела
Для системы твердых тел можно установить локальную декартову система координат для каждого твердого тела. Матрицы преобразования используется для описания относительного движения между твердыми телами.
Например, два твердых тела в пространстве имеют локальные координаты
системы x 1 y 1 z 1 и
х 2 у 2 z 2 . Пусть точка P будет
прикреплен к корпусу 2 в месте (x 2 , y 2 ,
я 2 ) в локальной системе координат тела 2. Чтобы найти
расположение P относительно локальной системы координат тела 1,
мы знаем, что точка x 2 y 2 z 2 можно получить из x 1 y 1 z 1 с помощью
комбинируя перемещение L x1 по оси x и
вращение z вокруг z
ось. Мы можем вывести матрицу преобразования следующим образом:
Чтобы найти
расположение P относительно локальной системы координат тела 1,
мы знаем, что точка x 2 y 2 z 2 можно получить из x 1 y 1 z 1 с помощью
комбинируя перемещение L x1 по оси x и
вращение z вокруг z
ось. Мы можем вывести матрицу преобразования следующим образом:
Если твердое тело 1 закрепить в виде рамы, На этом теле может быть создана глобальная система координат. Следовательно приведенное выше преобразование можно использовать для отображения локальных координат указать в глобальных координатах.
4.6.2 Кинематические ограничения между двумя жесткими Кузова
Приведенная выше матрица преобразования является конкретным примером для двух
несвязанные твердые тела. Матрица преобразования зависит от
относительное положение двух твердых тел. Если соединить два жестких
тела с кинематической связью, их
степени свободы уменьшатся.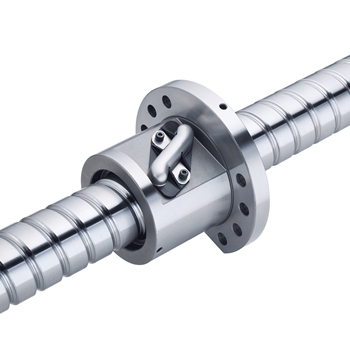 Другими словами, их родственник
движение будет задано в некоторой степени.
Другими словами, их родственник
движение будет задано в некоторой степени.
Предположим, мы ограничиваем два твердых тела с помощью вращающейся пары, как показано на рис. 4-19.. Мы можем по-прежнему запишите матрицу преобразования в той же форме, что и уравнение 4-18.
Рисунок 4-19 Относительное положение точек на зависимых телах
Отличие в том, что L x1 является константой теперь, потому что вращающаяся пара фиксирует начало системы координат x 2 y 2 z 2 относительно системы координат х 1 у 1 z 1 . Тем не менее, ротация г все еще является переменной. Таким образом, кинематические ограничения задают матрица преобразования в некоторой степени.
4.6.3 Обозначение Денавита-Хартенберга
Обозначение Денавита-Хартенберга (Denavit & Hartenberg 55)
широко используется при преобразовании систем координат рычажных механизмов и механизмов роботов. Может быть
используется для представления матрицы преобразования между ссылками, как показано на
Рисунок 4-20.
Может быть
используется для представления матрицы преобразования между ссылками, как показано на
Рисунок 4-20.
Рисунок 4-20 Обозначения Денавита-Хартенберга
На этом рисунке
- z i-1 и z i — оси двух вращательных пар;
- и угол между осями x i-1 и x i ;
- d i — расстояние между началом системы координат х i-1 y i-1 z i-1 и подошва обыкновенная перпендикуляр;
- a i — расстояние между двумя футами общего перпендикуляра;
- и угол между осями z i-1 и z i ;
Матрица преобразования будет T (и-1)и
Приведенную выше матрицу преобразования можно обозначить как T(a i , и , и , д и ) для удобства.
4.6.4 Применение матриц преобразования к связям
Рычажный механизм состоит из нескольких связанных твердых тел. Как
механизм, рычажный механизм должен иметь раму. Матричный метод может быть
используется для вывода кинематических уравнений рычажного механизма. Если все
ссылки образуют замкнутый цикл, конкатенация всех
матрицы преобразования будут единичной матрицей. Если механизм
имеет n ссылок, будем иметь:
Как
механизм, рычажный механизм должен иметь раму. Матричный метод может быть
используется для вывода кинематических уравнений рычажного механизма. Если все
ссылки образуют замкнутый цикл, конкатенация всех
матрицы преобразования будут единичной матрицей. Если механизм
имеет n ссылок, будем иметь:
Т 12 Т 23 …Т (n-1)n = I
(4-20)
Содержание
Полное оглавление- 1 Введение в механизмы
- 2 Механизмы и простые машины
- 3 Подробнее о машинах и механизмах
- 4 Базовая кинематика жестких тел со связями
- 4.1 Степени свободы твердого тела
- 4.1.1 Степени свободы твердого тела на плоскости
- 4.1.2 Степени свободы твердого тела в пространстве
- 4.2 Кинематические ограничения
- 4.2.1 Нижние пары в планарных механизмах
- 4.2.2 Нижние пары в пространственных механизмах
- 4.
- 4.1.1 Степени свободы твердого тела на плоскости
- 2 Механизмы и простые машины
