Натяжения датчики – Датчики натяжения :: СервоКИП-Контроль натяжения и положения
alexxlab | 31.08.2016 | 0 | Вопросы и ответы
датчик натяжения нити с многократной настройкой, устройство подачи эластичных нитей и способ настройки датчика натяжения нити – патент РФ 2154128
Изобретение относится к текстильной промышленности и направлено на обеспечение повышения равномерности натяжения нити при ее неравномерном изобретении и на улучшение качества вырабатываемых изделий. Предусмотренное, в частности, для плосковязальных машин и эластичной пряжи устройство подачи нити имеет датчик натяжения нити, который снабжен калибровочным устройством. Оно снимает нить с принадлежащего датчику натяжения нити штифта в моменты времени, в которых это возможно без оказания отрицательного влияния на работу устройства подачи нити. Этими моментами времени являются, предпочтительно, временные окна, в которых не требуется подача нити. После снятия нити со штифта проводят балансировку нулевой точки, благодаря чему можно измерить и компенсировать дрейф нулевых точек всей системы датчиков, включая ее измерительную схему. 3 с. и 23 з.п.ф-лы, 10 ил. Изобретение относится к датчику натяжения нити, в частности, для подачи эластичных нитей в вязальную машину, к устройству подачи нити для вязальной машины, а также к способу настройки датчика натяжения нити. Во многих случаях использования текстильной техники, в частности, для вязальных машин часто является необходимым удерживать подлежащую подводу к местам вязания или к другим местам нить под постоянным натяжением. Это имеет особое значение для плосковязальных машин, которые вследствие возвратно-поступательного движения нитеводителя (каретки) имеют сильно колеблющийся во времени расход нити. Устройство подачи нити должно здесь подавать нить с резко изменяющейся во времени скоростью. Если при этом изменяется натяжение нити, например, во время, до или после изменения направления движения нитеводителя, то изменяются размеры петель трикотажного полотна, что отрицательно сказывается на его внешнем виде, эластичности и качестве. Наиболее критическими являются, в частности, области кромок изготовленного на плосковязальных машинах трикотажного полотна. Особые требования необходимо предъявлять к постоянству натяжения при подаче эластичных нитей (эластанов), которые, например, используются для вязания вместе с другими нитями. При этом для поддерживания постоянным натяжения нити необходимо его постоянно контролировать и соответственно регулировать количество подачи нити. Для этого известно, например, из DE 195 37 215 A1 устройство подачи нити для эластичной пряжи, которое предусмотрено для применения в плосковязальных машинах. Устройство подачи нити служит для подачи эластановых нитей и имеет приводимое в движение электродвигателем нитеподающее колесо. Электродвигатель управляется контуром управления, который измеряет мгновенное натяжение нити с помощью датчика натяжения нити. Датчик имеет установленный с возможностью поворота поперек направления движения нити штифт, по которому под тупым углом направляется нить. Поворот штифта соответствует натяжению нити и измеряется подходящим датчиком перемещений. Кроме того, из US-PS 3 858 416 известно устройство подачи нити для вязальных машин, которое также имеет нитеподающее колесо, которое приводится в движение двигателем. Двигатель управляется контуром регулирования, который измеряет натяжение нити с помощью датчика натяжения нити. Датчик имеет установленный с возможностью поворота штифт, по которому проходит нить. Из DE 39 42 341 A1 известен датчик силы для контроля натяжения нити, в котором чувствительный элемент опирается на пружинный параллелограмм. Отклонение чувствительного элемента передается на обладающее изменяющимся сопротивлением тело сгибания, так что отклонение чувствительного элемента и тем самым натяжение нити можно измерять электрическим способом. Постоянство натяжения имеет большое значение, в частности, для подачи эластичных нитей для создания эластичного трикотажного полотна. Уже самые незначительные колебания и, в частности, долговременные изменения отражаются на изменяющемся качестве. Поэтому необходимо поддерживать натяжение нити постоянным в течение длительных промежутков времени, т.е. часов, дней и месяцев. Вязальные машины и устройства подачи нити часто применяют в цехах, в которых не в последнюю очередь за счет выделения тепла вязальными машинами в течение дня изменяется температура и соответственно в течение работы машин. Тем самым изменяется также температура датчиков натяжения нити, что, несмотря на возможное присутствие температурной компенсации, оказывает влияние на их выходные сигналы. Кроме того, происходящее со временем отложение загрязнений может приводить к изменению выходного сигнала датчика, если, например, отложения загрязнений на штифте для измерения натяжения нити увеличивают общий вес штифта и тем самым сдвигают нулевую точку сигнала. Исходя из этого, задачей изобретения является создание датчика натяжения нити, который обеспечивает стабильное в течение длительного времени измерение натяжения нити. Кроме того, должно быть создано устройство подачи нити, которое, например, в плосковязальной машине подает нить с постоянным натяжением. Наконец, задачей изобретения является создание способа работы датчика натяжения, при применении которого датчик выдает надежный, стабильный в течение длительного времени выходной сигнал. Эта задача решается с помощью датчика натяжения нити, предусмотренного для измерения натяжения движущейся нити, в частности для устройств подачи эластичных нитей, в частности для вязальных машин, указанный датчик содержит элемент, контролирующий наличие нити, который расположен на пути движения нити и который имеет поверхность прилегания для нити, соединенное с элементом, контролирующим наличие нити, измерительное устройство для измерения усилия, оказываемого нитью на элемент для ощупывания нити, средство для приема нити, выполненное с возможностью, по меньшей мере, перевода в соприкосновение с нитью или находящееся постоянно в соприкосновении с нитью, и исполнительное устройство для такого перемещения элемента, контролирующего наличие нити, и средства для приема нити относительно друг друга между положением калибровки и положением измерения, что нить в положении калибровки не прилегает к элементу, контролирующему наличие нити, и что нить в положении измерения прилегает к элементу, контролирующему наличие нити. При этом задаваемое исполнительным устройством направление движения проходит поперек нити. Таким образом, датчик натяжения нити, согласно изобретению, имеет кроме своего элемента ощупывания нити, который для измерения натяжения нити соприкасается с нитью, еще средство приема нити, которое установлено с возможностью перемещения. Оно имеет по меньшей мере два различных положения, которые отличаются тем, что нить в положении калибровки отделена от элемента, контролирующего наличие нити, а в положении измерения средства приема нити они прилегают к элементу, контролирующему наличие нити. За счет целенаправленного изменения положения средства для приема нити и/или датчика натяжения нити возможно произвольно снимать нить с элемента, контролирующего наличие нити, так что он приходит в свое положение покоя. Оно отличается тем, что на элемент, контролирующий наличие нити, не воздействует никакая сила. Измерительное устройство измеряет это положение или это состояние элемента, контролирующего наличие нити. Если в механической или в электрической системах датчика натяжения нити возникает отклонение, то оно при снятии нити с элемента, контролирующего наличие нити, может быть опознано и измерено. Например, снятие нити с элемента, контролирующего наличие нити, можно использовать для установки на нуль датчика натяжения нити. Таким образом, можно предотвращать также появление долговременных отклонений, которые в противном случае накладывались бы на выходной сигнал датчика натяжения нити. За счет распознавания и исключения влияния отклонений, которые могут быть обусловлены, например, температурным дрейфом или отложением загрязнений на элементе, контролирующем наличие нити, создается долговременный выходной сигнал датчика, который отражает натяжение нити без погрешностей в нулевой точке. Это позволяет создать устройство подачи нити с высоким долговременным постоянством натяжения нити. Это достигается тем, что датчик натяжения нити в ходе работы устройства подачи нити неоднократно калибруют, в частности, тем, что неоднократно проводят балансировку нулевой точки. Это достигается снятием/отводом нити от датчика натяжения нити определением измеряемого значения при снятой нити. Измеренная величина является нулевой точкой для натяжения нити, измеренного датчиком натяжения нити после укладки нити на элемент, контролирующий наличие нити. В первом варианте выполнения элемент, контролирующий наличие нити, и средство для приема нити расположены на противоположных концах пути нити. Для измерения средство для приема нити “прижимает” нить к элементу, контролирующему наличие нити; для калибровки оно позволяет снимать нить с элемента, контролирующего наличие нити. Во втором варианте выполнения элемент, контролирующий наличие нити, и средство для приема нити расположены на одной стороне пути нити. Для калибровки средство приема нити “отжимает” нить от элемента, контролирующего наличие нити; для измерения оно позволяет нити прилегать к элементу, контролирующему наличие нити. В первом варианте выполнения конструкции можно перемещать датчик, в то время как во втором варианте конструкции с возможностью перемещения установлен элемент, контролирующий наличие нити. Процесс калибровки или балансировки нулевой точки предпочтительно проводят тогда, когда устройство для подачи нити не подает нить. В этот промежуток времени колебания натяжения нити, вызванные или обусловленные балансировкой нулевой точки, не могут привести к отрицательному воздействию на изготавливаемое трикотажное изделие. В качестве альтернативного решения возможно проводить балансировку нулевой точки с кратковременным снятием нити с элемента, контролирующего наличие нити, если нить перемещается медленно или ее скорость движения в данный момент не изменяется. В этом случае регулирующее подачу нити устройство на короткое время отключают, т.е. ее выходной сигнал остается на мгновенном значении, проводят балансировку нулевой точки и после наложения нити на датчик натяжения нити снова активируют регулировочный контур. Для надежного распознавания достаточно длительной остановки электродвигателя контролируют сигнал управления электродвигателем. При возникновении фронта L-O, т.е. отчетливого перехода сигнала управления с отличного от нуля значения на нулевое значение, делается предположение, что электродвигатель преднамеренно останавливают. В плосковязальных машинах на основе особого принципа работы после преднамеренной остановки электродвигателя нитеподающего устройства можно рассчитывать на повторный старт электродвигателя лишь по истечении заданного времени, например около 500 мс. То же относится к смене нити в чулочно-носочных машинах. Предпочтительно выдержать время ожидания, например 20 мс, и если по истечении этого времени сигнал управления все еще равен нулю, разрешать процесс калибровки, который длится не более 10 мс. Процесс калибровки выполняют тогда, когда он разрешен и (как второй критерий) когда он затребован. Как правило, это имеет место через регулярные промежутки времени. Промежутки времени после включения машины могут быть короче (2 мин) и после разгона – длиннее (30 мин). Датчик натяжения нити имеет предпочтительно приданное средству для приема нити приводное устройство, например тяговый магнит или другой привод (электрический или пневматический вращательный, поворотный или линейный привод), который выполнен с возможностью активации от устройства калибрования и который так приводит в действие средство для приема нити, что оно переводится в свое первое положение, снимающее нить с элемента, контролирующего наличие нити. Затем может быть проведена балансировка нулевой точки. При дезактивации приводного устройства средство для приема нити переходит во второе положение, в котором нить прилегает к элементу, контролирующему наличие нити. В этом положении нить предпочтительно отделена от средства для приема нити, т.е. не касается его. За счет этого исключаются погрешности измерения вследствие трения нити о средство для приема нити. Однако возможно также преднамеренно использовать средство для приема нити для направления нити. В названном первом варианте нить находится в зацеплении либо с средством для приема нити, либо с элементом, контролирующим наличие нити. Во втором варианте нить находится всегда в соприкосновении с средством для приема нити, независимо от того, снята она или нет с элемента, контролирующего наличие нити. Средство для приема нити образовано одним, предпочтительно двумя смежными с элементом, контролирующим наличие нити, нитеприемниками. Они в простейшем случае представляют собой штифты, которые проходят параллельно также выполненному в форме штифта элементу, контролирующему наличие нити. Можно использовать также проушины. Как штифт элемента, контролирующего наличие нити, так и штифты средства для приема нити проходят поперек направления движения нити, предпочтительно под прямым углом. За счет этого достигается то, что при относительно широких штифтах все положения нити на штифте являются равноправными, так что нить не врезается в предпочтительном месте. Элемент, контролирующий наличие нити, опирается предпочтительно на пружинный параллелограмм. Тогда выполненный предпочтительно в форме штифта элемент, контролирующий наличие нити, расположен под прямым углом к изгибным пружинам. За счет этого достаточно одностороннего закрепления и опирания элемента, контролирующего наличие нити, и обеспечивается хорошая точность измерений. Измерительное устройство имеет предпочтительно два датчика перемещения, выходные сигналы которых при отклонении элемента, контролирующего наличие нити, изменяются предпочтительно в противоположных направлениях. Это позволяет отказаться от подавления отклонения в схеме оценки. Эта схема является предпочтительно формирователем разности, которой может быть образован мостовой схемой, операционным усилителем или другим соответствующим средством. Датчик натяжения нити согласно изобретению, а также устройство подачи нити согласно изобретению следует применять, например, в плосковязальных машинах, причем указанный процесс калибровки или балансировки нулевой точки можно проводить при изменении на обратное направления нитеводителя или при смене нити. Если нитеводитель перемещается, например, в направлении от устройства подачи нити и в конце своего хода останавливается, для того чтобы сменить направление движения на противоположное, то требуемое количество подаваемой нити независимо от выполняемого узора вязания на короткое время равно нулю. Особая калибровочная схема может это определять и на короткое время активировать приводное устройство, так что нить снимается с элемента, контролирующего наличие нити, и получаемое значение измерения можно принимать за нулевую точку. После этого схема калибрования дезактивирует приводное устройство, так что нить снова укладывается на элемент, контролирующий наличие нити. Весь процесс при соответствующем выполнении датчика натяжения нити и приводного устройства для средства для приема нити может быть закончен за период от нескольких миллисекунд до нескольких десятков миллисекунд. Таким образом, возникающая при смене направления нитеводителя остановка достаточна для проведения калибровки. Кроме того, калибровку можно выполнять в других случаях, связанных с низкой скоростью движения нити или со скоростью движения нити, равной нулю. Например, устройство подачи нити при остановке вязальной машины может работать в режиме ожидания или в режиме остановки. Если устройство подачи нити выводится из этого состояния (включается), то может быть выполнен кратковременный процесс калибровки. Технический результат достигается также за счет устройства подачи нити, в частности, для эластичных нитей, в частности, для вязальных машин с сильно колеблющимся расходом нити, как например, плосковязальных машин. Устройство содержит приводимое в движение от электродвигателя нитеподающее колесо, регулирующее устройство для управления электродвигателем с обеспечением поставки требуемого количества нити и поддержанием при этом натяжения нити внутри заданных пределов, датчик натяжения нити, активируемое с помощью калибровочного импульса калибровочное устройство для датчика натяжения нити, с помощью которого обеспечивается возможность перевода средства для приема нити и датчика натяжения нити относительно друг друга в положение для калибровки датчика натяжения нити. Задача решается также способом калибровки датчика натяжения нити, в частности, балансировки нулевой точки датчика натяжения нити, при этом измеряют сигнал, который характеризует состояние, в котором натяжение нити может кратковременно отклоняться от его номинального значения, отделяют нить от датчика натяжения нити, измеряют при снятой нити выдаваемый датчиком натяжения нити сигнал и снова приводят нить в контакт с датчиком натяжения нити. При этом сигнал характеризует скорость нити, которая меньше заданного предельного значения, а измеренное при снятой нити значение принимают за нулевое значение. Процесс калибровки проводят в плосковязальной машине при изменении направления движения и/или при запуске, либо при движущейся нити во временном окне, в котором скорость нити является постоянной. Другие предпочтительные варианты выполнения изобретения являются предметом зависимых пунктов формулы изобретения, чертежей, а также относящегося к ним описания. Пример выполнения изобретения иллюстрирован чертежами, на которых изображено:Фиг. 2 – устройство подачи нити по фиг. 1 в схематическом виде сбоку,
Фиг. 3 – датчик натяжения нити устройства подачи нити по фиг. 1 и 2 в упрощенной перспективной проекции и в другом масштабе,
Фиг. 4 – датчик натяжения нити по фиг. 3 в виде сверху,
Фиг. 5 – датчик натяжения нити по фиг. 4 в схематичном изображении для иллюстрации его принципа действия,
Фиг. 6 – датчик натяжения нити по фиг. 4 в разрезе по линии VI-VI,
Фиг. 7 – датчик натяжения нити по фиг. 4 в схематичном изображении спереди,
Фиг. 8 – датчик натяжения нити по фиг. 4 в виде сбоку,
Фиг. 9 – электрическая схема для обработки выходных сигналов двух датчиков Холла, служащих датчиками перемещения,
Фиг. 10 – схема последовательности операций для иллюстрации способа при балансировки точки нуля датчика натяжения нити. На фиг. 1 показано устройство 1 подачи нити, корпус 2 которого имеет в основном плоскую переднюю сторону 3. На ней расположены нитеподающее колесо 4 и датчик 5 натяжения нити. Корпус 2 устройства подачи нити, который снабжен неизображенными средствами для крепления на вязальной машине, в частности плосковязальной машине, имеет рядом с нитеподающим колесом 4 проушину 6 для направления показанной только в виде отрезка нити 7. Эта проушина 6 снабжена вставкой 8 из керамики и расположена относительно показанного стрелкой 9 направления движения нити перед нитеподающим колесом 4. На противоположном конце корпуса 2 в соединении с сигнальной лампой 11 расположена другая проушина 12 с керамической вставкой 8. На расположенном между проушинами пути 13 перемещения нити нитеподающее колесо 4 служит для транспортировки и подачи нити 7 в зависимости от потребности, а датчик 5 натяжения нити – для контроля за натяжением нити. Расположенное в корпусе 2 регулирующее устройство на основе поставляемого датчиком натяжения нити сигнала управляет электродвигателем, служащим для привода нитеподающего колеса 4. Нитеподающее колесо 4 выполнено предпочтительно с шестью или более крыльями и имеет несколько исходящих радиально из ступицы 14 спиц 15, 16, которые на конце соединены между собой перемычкой 17. Пара спиц и перемычка 17 образуют одно крыло 18. Крылья 18 расположены на равных угловых расстояниях друг от друга. Поэтому нитеподающее колесо 4 имеет многоугольную внешнюю периферию, к которой прилегает в виде правильного шестиугольника нить 7. За нитеподающим колесом 4 следует датчик 5 натяжения нити, который имеет штифт 21 в качестве элемента, контролирующего наличие нити. Он проходит поперек нити 7, которая под тупым углом проходит по внешней поверхности цилиндрического штифта 21. Как показано на фиг. 2, нитеподающее колесо 4 установлено с возможностью вращения вокруг оси 22 вращения, которая расположена не параллельно определяемой штифтом 21 продольной оси 23. За счет наклонного расположения нитеподающего колеса 4 относительно штифта 21 и тем самым относительно нити 7 для нити при сходе с нитеподающего колеса 4 создаются благоприятные условия. Нить стягивается под большим углом. Это приводит к точному сходу нити с нитеподающего колеса, с других витков нити, расположенных на нитеподающем колесе. Поскольку условия прохождения нити не зависят от ориентации штифта 21, то нить 7 проходит под острым углом к воображаемой плоскости 24 (фиг. 2), для которой ось вращения 22 задает направление нормали к ней. Это достигается соответствующим расположением проушины 12. Датчик 5 натяжения нити поясняется на основе фиг. 3 – 5. Штифт 21 одним концом опирается на опору 27 с малой массой, которая удерживается с возможностью перемещения в основном в продольном направлении двумя расположенными по типу пружинного параллелограмма плоскими пружинами 28, 29. Опора 27 концевыми цилиндрическими участками входит в демпфирующие гнезда или трубочки 31, 32, которые содержат более или менее вязкую жидкость. За счет этого достигается подавление, в частности, высокочастотных составляющих сигнала, которые могут возникать, например, вследствие многоугольного очертания нитеподающего колеса 4. Изгибные пружины 28, 29 на концах вставлены в соответствующие приемники 33, 34, которые закреплены на цоколе 35. Последний, как показано на фиг. 7, установлен неподвижно на четырех, выполненных предпочтительно из резины демпфирующих элементах 36. Цоколь 35, как показано на фиг. 4, образован, например, U-образным ярмом 35а. На опоре 27 расположен постоянный магнит 37, магнитное поле которого достигает двух расположенных в непосредственной близости датчиков 38, 39 Холла и оказывает на них воздействие. Даже незначительное изменение положения опоры 27 относительно цоколя 35 измеряется датчиками 38, 39 Холла. К датчику 5 натяжения нити принадлежит калибровочное устройство 40 с двумя служащими в качестве средства 41 для приема нити штифтами 42, 43, которые расположены в основном параллельно штифту 21. Штифты 42 и 43 опираются на опорную рамку 44, которая вместе с штифтами 42, 43 имеет возможность перемещения поперек штифта 21 в направлении стрелки 45 (фиг. 3, 4 и 5). За счет этого средство 41 для приема нити можно переводить в, по меньшей мере, две различных позиции. В первой позиции, которая на фиг. 5 показана пунктирными линиями, штифты 42, 43 находятся в положении, в котором они снимают нить 7 с штифта 21. В этом положении на штифт 21 не действуют никакие силы, исходящие от нити 7. Во второй позиции средства 41 для приема нити, которая показана на фиг. 5 сплошными линиями, нить 7 прилегает только к штифту 21, но не к штифтам 42, 43 средства 41 для приема нити. Натяжение нити вызывает соответствующее отклонение штифта 21 и тем самым выходной сигнал датчика. Средство 41 для приема нити соединено с приводным устройством 46. Для этого штифты 42, 43 удерживаются рамкой 47, которая охватывает привод 48 с катушкой электромагнита. Его катушка 49 электромагнита имеет соединенный с рамкой 47 тяговый якорь 51. Рамка 47 с помощью соответствующих направляющих средств 52, например, предусмотренных в пластине 53 основания продолговатых отверстий 54 или тягового якоря 51 установлена с возможностью сдвига в направлении перемещения (стрелка 45). Для предварительного напряжения средства 41 для приема нити в его вторую, неактивную позицию рамка соединена с пластиной 53 основания через пружинное средство 56. Пружинное средство 56 является предпочтительно плоской пружиной 57, которая одним концом удерживается на пластине 53 основания, своим противоположным концом соединена с рамкой 47. Показанные на фиг. 5 лишь схематично датчики 38, 39 Холла, как показано на фиг. 9, соединены с измерительной схемой 61, которая обрабатывает выходные сигналы с выходов 62, 63 датчиков 38, 39 Холла. Датчики 38, 39 Холла расположены так, что они выдают противонаправленные сигналы. Если опора 27 отклоняется в одном направлении, то увеличивается, например, сигнал датчика 38 Холла, в то время как сигнал датчика 39 Холла уменьшается. Для оценки этих сигналов измерительная схема 61 выполнена как формирователь разности и содержит для этого операционный усилитель 65. Он работает как дифференциальный усилитель. Усиление напряжений на неинвертирующем и на инвертирующем входах по абсолютному значению одинаково, однако имеет противоположный знак. Это обеспечивается соответствующими схемами. Дополнительно включены фильтры ТР1 и ТР2 низких частот для подавления высокочастотных составляющих сигналов датчиков. Таким образом, на выходе образуется усредненное во времени и усиленное значение разности выходных сигналов датчиков 38, 39 Холла. За счет многоугольного очертания нитеподающего колеса 4 и прямого прохождения нити к штифту 21 без расположенных между ними опор нить 7 периодически изменяет свой угол на штифте 21. Вызванные этим колебания сигнала датчика отфильтровываются фильтрами низких частот измерительной схемы 61. Изменение положения устройства 1 подачи нити, отложения на штифте 21, а также изменение удержания магнита 37 или изменение температуры или явления дрейфа датчиков 38, 39 Холла и вызванные температурой или старением отклонения в измерительной схеме 61 могут постепенно приводить к изменению выходного сигнала на выходе измерительной схемы 61. Для распознавания такого ухода нулевой точки устройства 1 подачи нити снабжено схемой автоматической калибровки или балансировки нулевой точки. Она соединена с катушкой 49 электромагнита. Настройка устройства 1 подачи нити происходит следующим образом:
Сначала исходят из того, что неизображенная вязальная машина, которая снабжена устройством 1 подачи нити, не работает. Устройство 1 подачи нити отключено, однако его электронная схема остается активной. Устройство находится в ждущем рабочем режиме. Для включения вязальной машины активируют среди прочего также устройство 1 подачи нити. Для этого калибровочная схема на короткое время возбуждает катушку 41 электромагнита, которая втягивает якорь 51. Тем самым рамка 47 сдвигается в направлении штифта 21 настолько, что штифты 42, 43 проходят мимо штифта 21 и снимают нить 7 с штифта 21. Теперь штифт 21 свободен от сил нити и выдаваемый в этом состоянии измерительной схемой 61 сигнал отмечает нулевую точку, т.е. нулевое натяжение нити. Как только это значение будет измерено и зарегистрировано, отключается возбуждение катушки 49 электромагнита, так что якорь 51 освобождается, и рамка 47 под действием пружинного средства 56 переходит обратно в ее заднее положение. При этом нить 7 укладывается на штифт 21, а штифты 42, 43 опускают нить 7. Передаваемое с нити 7 на штифт 21 усилие приводит к смещению опоры 27, которое измеряется датчиками 38, 39 Холла и выдается измерительной схемой 61 как выходной сигнал. Этот сигнал является сигналом действительного значения для регулировочного контура, который управляет электродвигателем нитеподающего колеса 4. Если теперь происходит расход нити, то регулировочный контур так управляет электродвигателем, что нитеподающее колесо 4 поставляет необходимое для поддержания постоянства натяжения нити количество нити. Предотвращение погрешностей вследствие возникающего после включения устройства 1 подачи нити дрейфа нулевой точки может быть обеспечено тем, что указанный процесс калибровки часто повторяют. Это возможно, в частности, во временных окнах, в которых во время работы устройства 1 подачи нити нитеподающее колесо 4 и тем самым нить 7 останавливаются. Это состояние характеризуется, например, сигналом регулирующего устройства (напряжение управления электродвигателем равно нулю). Для определения таких временных окон калибровочная схема контролирует выходной сигнал регулирующего устройства. Если имеет место такое временное окно, то запускается требующий лишь от нескольких миллисекунд до нескольких десятков миллисекунд процесс калибровки, т.е. на короткое время возбуждается катушка 49 электромагнита и проводится балансировка нулевой точки измерительной схемы 61, при этом возникающий выходной сигнал принимается за нулевое значение. Для определения возможных временных окон сначала согласно схеме последовательности выполнения операций по фиг. 9 ожидают окончания заданного интервала времени tбаланс.. Время tбаланс. является интервалом времени, в течение которого следует произвести балансировку нулевой точки. Он составляет от нескольких минут до одного часа. Когда этот интервал времени закончится, то сначала исследуют выходной сигнал регулирующего устройства на предмет того, не стремится ли он к нулю. Затем проверяют, остается ли он в течение заданного времени, например 20 мс на нуле. Если это так, то имеет место временное окно и ожидается, что электродвигатель регулятора движения нити будет намеренно остановлен и остается остановленным в течение длительного времени (500 мс). Во время такого временного окна можно проводить настройку. Распознавание временного окна происходит предпочтительно посредством запуска триггера фронтом сигнала. В машине с временно прекращающимся расходом нити автоматическая настройка может происходить при перемене направления движения каретки или нитеводителя, которое сопровождается остановкой электродвигателя нитеподающего колеса 4. Если выявляется такая остановка электродвигателя, то после заданного изменяемого времени может быть проведена автоматическая настройка. Таким образом, возможно обнаруживать и компенсировать даже кратковременные и относительно быстро происходящие отклонения внутри всей системы. Предусмотренное, в частности, для машин с временно прекращающимся расходом нити и для эластичной пряжи устройство 1 подачи нити имеет датчик 5 натяжения нити, который снабжен калибровочным устройством 40. Это устройство снимает нить 7 с принадлежащего к датчику 5 натяжения нити штифта 21 в те моменты времени, в которые это возможно без оказания отрицательного воздействия на работу устройства 1 подачи нити. Такими моментами являются предпочтительно временные окна, в течение которых не требуется подачи нити. Когда нить 7 снята с штифта 21, проводят балансировку нулевой точки, тем самым можно измерять и компенсировать дрейф нулевой точки всей системы датчиков, включая измерительную схему 61.
ФОРМУЛА ИЗОБРЕТЕНИЯ
1. Датчик (5) натяжения нити для измерения натяжения движущейся нити (7), в частности, для устройств для подачи эластичных нитей, в частности, для вязальных машин, содержащий элемент (21), контролирующий наличие нити, который расположен на пути движения нити и который имеет поверхность прилегания для нити (7), соединенное с элементом (21), контролирующим наличие нити, измерительное устройство для измерения усилия, оказываемого нитью (7) на элемент (21) для ощупывания нити, средство (41) для приема нити, выполненное с возможностью, по меньшей мере, перевода в соприкосновение с нитью или находящееся постоянно в соприкосновении с нитью, исполнительное устройство (48) для такого перемещения элемента (21), контролирующего наличие нити, и средства (41) для приема нити относительно друг друга между положением калибровки и положением измерения, что нить в положении калибровки не прилегает к элементу (21), контролирующему наличие нити, и что нить в положении измерения прилегает к элементу (21), контролирующему наличие нити. 2. Датчик (5) натяжения нити по п.1, в котором задаваемое исполнительным устройством (48) направление движения проходит поперек нити. 3. Датчик (5) натяжения нити по п.1, в котором средство (41) для приема нити и элемент (21), контролирующий наличие нити, расположены на заданной одной стороне нити, и средство (41) для приема нити выполнено с возможностью съема нити с элемента (21), контролирующего наличие нити, в положении калибровки, а в положении измерения предпочтительно не соприкасается с нитью, причем нить прилегает к элементу (21), контролирующему наличие нити. 4. Датчик (5) натяжения нити по п.1, в котором средство (41) для приема нити и элемент (21), контролирующий наличие нити, расположены на заданных противоположных сторонах нити, и средство (41) для приема нити выполнено с возможностью съема нити с элемента (21), контролирующего наличие нити, в положении калибровки, а в положении измерения, предпочтительно соприкасаясь с нитью, удерживает ее в соприкосновении с элементом (21), контролирующим наличие нити. 5. Датчик (5) натяжения нити по п.1, в котором исполнительное устройство (48) соединено со средством (41) для приема нити для перемещения его из положения калибровки в положение измерения и обратно и элемент (21), контролирующий наличие нити, в основном, т.е. за исключением своего перемещения измерения, расположен стационарно. 6. Датчик (5) натяжения нити по п.1, в котором исполнительное устройство (48) соединено с измерительным устройством для перемещения его вместе с элементом (21), контролирующим наличие нити, для перемещения его из положения калибровки в положение измерения и обратно и средство (41) для приема нити расположено стационарно. 7. Датчик (5) натяжения нити по п.5 или 6, в котором исполнительное устройство (48) является электрическим линейным приводом (49, 51, 56). 8. Датчик (5) натяжения нити по п.1, в котором средство (41) для приема нити образовано, по меньшей мере, одним, предпочтительно двумя нитеприемниками (42, 43), которые расположены смежно с элементом (21), контролирующим наличие нити. 9. Датчик (5) натяжения нити по п.1, в котором элемент (21), контролирующий наличие нити, установлен предпочтительно пружинно и с возможностью перемещения в основном поперек движения нити, причем измерительное устройство содержит устройство (38, 39) измерения перемещения. 10. Датчик (5) натяжения нити по п.1, в котором элемент (21), контролирующий наличие нити, с помощью пружинного параллелограмма (28, 29) опирается на цоколь (35), на который опирается и устройство (38, 39) измерения перемещения и который установлен пружинно и с демпфированием (36). 11. Датчик (5) натяжения нити по п.9, в котором устройство (38, 39) измерения перемещения имеет два датчика перемещения, которые подключены к измерительному устройству (61), которое содержит предпочтительно формирователь (65) разности, к входам (+, -) которого подключены датчики перемещения измерительного устройства. 12. Датчик (5) натяжения нити по п.1, в котором элемент (21), контролирующий наличие нити, выполнен в виде расположенного поперек движения нити (7) штифта, изготовленного предпочтительно из керамики, причем нить (7) не направлена относительно продольного направления штифта. 13. Датчик (5) натяжения нити по п.1, в котором средство (41) для приема нити принадлежит к калибровочному устройству (40) для регулирования опорного значения измерительного устройства. 14. Датчик (5) натяжения нити по п.13, в котором калибровочное устройство (40) выполнено с возможностью активации от выдаваемого машиной сигнала, который характеризует состояние, в котором нить (7) имеет скорость, которая меньше заданного предельного значения. 15. Датчик (5) натяжения нити по п.14, в котором предельное значение скорости нити равно нулю. 16. Датчик (5) натяжения нити по п.1, в котором к измерительному устройству (61) подключено регулирующее устройство для поддержания натяжения нити постоянным, имеющее дезактивирующий вход, причем регулирующее устройство не изменяет свой выходной сигнал при поступлении на дезактивирующий вход соответствующего сигнала. 17. Устройство подачи нити, в частности, для эластичных нитей, в частности, для вязальных машин с сильно колеблющимся расходом нити, как например, плосковязальных машин, содержащее приводимое в движение от электродвигателя нитеподающее колесо (4), регулирующее устройство для управления электродвигателем с обеспечением поставки требуемого количества нити и поддержанием при этом натяжения нити внутри заданных пределов, датчик (5) натяжения нити по любому из предшествующих пунктов и активируемое с помощью калибровочного импульса калибровочное устройство (40) для датчика (5) натяжения нити, с помощью которого обеспечивается возможность перевода средства (41) для приема нити и датчика (5) натяжения нити относительно друг друга в положение для калибровки датчика (5) натяжения нити. 18. Устройство подачи нити по п.17, в котором нитеподающее колесо (4) имеет ось (22) вращения, которая расположена в направлении нормали к плоскости, с которой сходящая нить (7) образует острый угол. 19. Устройство подачи нити по п.18, в котором калибровочное устройство (40) управляется скоростью нити. 20. Устройство подачи нити по п.19, в котором калибровочное устройство (40), по меньшей мере, тогда является не активным, когда скорость нити превосходит предельное значение. 21. Устройство подачи нити по п.19, в котором калибровочное устройство (40) выполнено с возможностью активации при смене направления движения нитеводителя плосковязальной машины, или при смене нити чулочно-носочных машин, или при других перерывах расхода нити в машинах. 22. Способ калибровки датчика натяжения нити, в частности, балансировки нулевой точки датчика натяжения нити, при котором измеряют сигнал, который характеризует состояние, в котором нить может кратковременно отклоняться от его номинального значения, отделяют нить от датчика натяжения нити, измеряют при снятой нити выдаваемый датчиком натяжения нити сигнал, снова приводят нить в контакт с датчиком натяжения нити. 23. Способ по п.22, при котором сигнал характеризует скорость нити, которая меньше заданного предельного значения. 24. Способ по п. 22, при котором измеренное при снятой нити значение принимают за нулевое значение. 25. Способ по п.22, при котором процесс калибровки проводят в плосковязальной машине при изменении направления движения и/или при запуске. 26. Способ по п.22, при котором процесс калибровки проводят при движущейся нити во временном окне, в котором скорость нити является постоянной.www.freepatent.ru
|
Наименование параметров и характеристик |
Номинальные значения |
Фактические значения |
|
1. Диапазон измерения натяжения каротажного кабеля |
от 5 до 100 кН |
5-100кН |
|
2. Значения уровней выходного сигнала при измерении натяжения кабеля в следующих вариантах исполнения: |
|
|
|
а) Уровень выходного сигнала при измерении натяжения каротажного кабеля от 5 до 100 кН |
от 0,5 до 10 мА |
0,5-10 мА |
|
б) Уровень выходного сигнала при измерении натяжения каротажного кабеля от 5 до 100 кН |
от 4,8 до 20 мА |
____ |
|
в) Уровень выходного сигнала при измерении натяжения каротажного кабеля от 5 до 100 кН |
от 0,25 до 5 В |
____ |
|
г) Уровень выходного сигнала при измерении натяжения каротажного кабеля от 5 до 100 кН |
от 0,25 до 5 мА |
____ |
|
3. Значения номинального коэффициента преобразования при установке датчика на верхний блок-баланс для соответствующих уровней выходного сигнала: |
|
|
|
а) Номинальный коэффициент преобразования с уровнем выходного сигнала от 0,5 до 10 мА |
0,1 мА/кН |
0,1 мА/кН |
|
б) Номинальный коэффициент преобразования с уровнем выходного сигнала от 4,8 до 20 мА |
0,16 мА/кН |
____ |
|
в) Номинальный коэффициент преобразования с уровнем выходного сигнала от 0,25 до 5 В |
0,05 В/кН |
____ |
|
г) Номинальный коэффициент преобразования с уровнем выходного сигнала от 0,25 до 5 мА |
0,05 мА/кН |
____ |
|
4. Характеристики погрешности |
|
|
|
4.1. Пределы основной приведенной погрешности к верхнему пределу диапазона измерения натяжения каротажного кабеля от 5 до 100 кН Примечание: Исполнение датчика натяжения с основной приведенной погрешностью ± 1 % изготавливается по специальному требованию заказчика |
± 1 % ± 3 %
|
____ ± 3 %
|
|
4.2. Дополнительная погрешность измерения от влияния температуры окружающей среды на каждые 10°С отклонения от плюс 20° |
0,25 % |
0,25 % |
|
5. Рабочий диапазон температуры измерения натяжения каротажного кабеля |
от -50 до +50 оС |
|
|
6. Напряжение питания постоянного тока |
+12 В ± 1 В |
|
|
7. Ток потребления, не более |
40 мА |
____ |
|
8. Габаритные размеры датчика: |
|
|
|
8.1. Габаритные размеры датчика без узла встройки не более |
73х65х180 мм |
|
|
8.2. Габаритные размеры датчика с узлом встройки для верхнего блок-баланса не более |
100х180х330 мм |
|
|
8.3. Габаритные размеры датчика с узлом встройки для нижнего блок-баланса не более |
100х180х460 мм |
|
|
9. Масса датчика: |
|
|
|
9.1 Масса датчика без узла встройки не более |
1,1 кг |
|
|
9.2. Масса датчика с узлом встройки для верхнего блок баланса не более |
8 кг |
|
|
9.3. Масса датчика с узлом встройки для нижнего блок баланса не более |
12 кг |
|
|
10. Время установления рабочего режима датчика после включения, не более |
5 мин |
|
|
11. Время непрерывной работы датчика: |
|
|
|
а) при воздействии: температуры окружающего воздуха плюс 25±10 °С; относительной влажности воздуха 45–80 %; атмосферного давления 84,0–106,7 кПа (630 – 800) мм. рт. ст |
не менее 10 ч |
|
|
б) при нижнем значении температуры окружающей среды рабочих условий применения (минус 50°С). |
не менее 2 ч |
|
|
12. Показатели надежности: |
|
|
|
12.1. Вероятность безотказной работы датчика за 50 часов непрерывной работы, не менее |
0,96 |
|
|
12.2. Средний срок службы датчика до списания не менее |
5 лет |
|
|
13. Рабочие условия эксплуатации: |
|
|
|
13.1. Интервал температур окружающей среды |
от минус 50 до плюс 50 оС |
|
|
13.2. Относительная влажность воздуха |
95 % |
|
groupgeo.ru
Датчики натяжения полотна
Измерители натяжения ELTENS
Для измерения натяжения полотна используются следующие датчики ELTENS
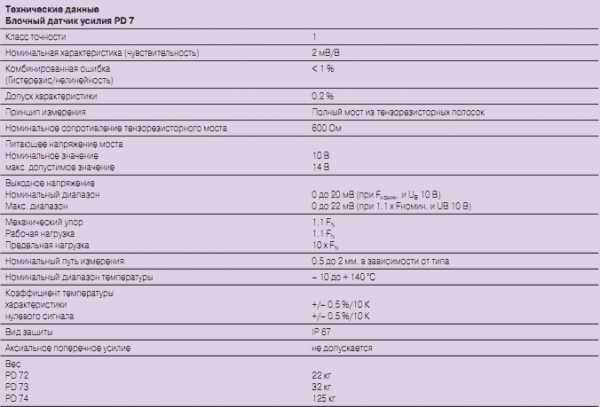
Блочный датчик усилия PD 7

- Возможен монтаж подшипников на лапках со стандартными направляющими валами
- Наряду со стальным исполнением для сухих областей имеется и нержавеющее исполнение датчика для мокрых областей
- Высокая надежность блочного датчика при эксплуатации благодаря защите от перегрузок до 10-ти кратного номинального измерительного усилия
- Различные типоразмеры и номинальные измерительные усилия от 0,1 до 70 кН обеспечивают высокую гибкость
- Встроенный демпфирующий элемент против ударной нагрузки и колебаний машины.
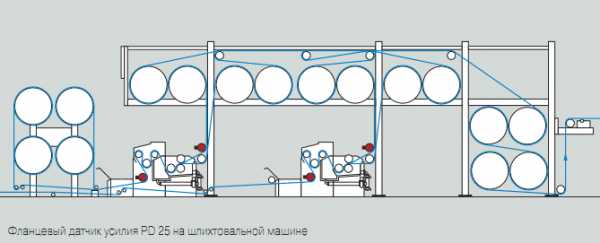
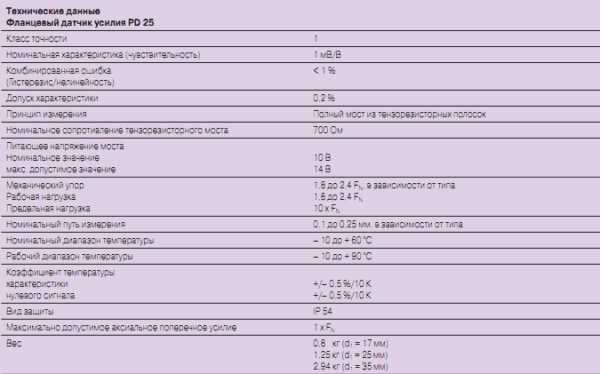
Алюминиевый фланцевый датчик натяжения PD 25

- Экономичный фланцевый датчик усилия из алюминия.
- Сопоставимый со стандартной серией PD 21/22.
- Независимый от опор, беспроблематичный монтаж благодаря различным возможностям монтажа как, например, фланцевый подшипник, подшипник на лапках, внутреннее или внешнее крепление
- Высокая надежность датчика усилия при эксплуатации благодаря защите от перегрузок до 10-ти кратного номинального измерительного натяжения
- Отсутствует влияние веса вала на результат измерения при горизонтальном монтаже направления измерения
- Положительная температурная характеристика и высокая линейность измерительных элементов благодаря применению тензорезисторных полосок на ровной плоскости
- Высокое допустимое рабочее число оборотов измерительного вала благодаря большой пружинной константе датчика натяжения полотна.
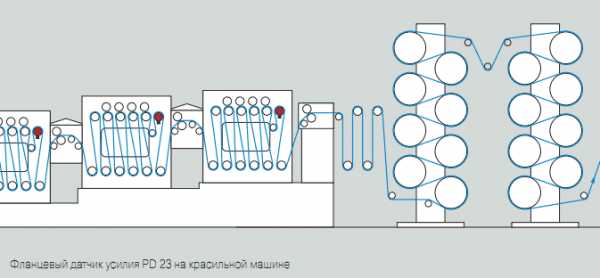
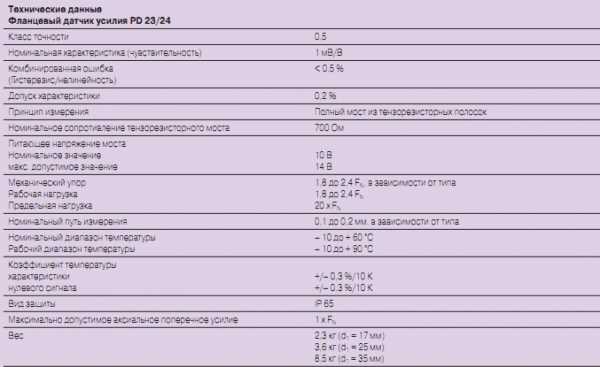
Нержавеющий фланцевый датчик натяжения PD 23/24

- Фланцевый датчик усилия из нержавеющей стали для тяжелых условий окружающей среды как, например, моечных или травильных машин.
- Независимый от опор, беспроблематичный монтаж благодаря различным возможностям монтажа как, например, фланцевый подшипник, подшипник на лапках, внутреннее или внешнее крепление
- Высокая надежность датчика усилия при эксплуатации благодаря защите от перегрузок до 20-ти кратного номинального измерительного натяжения
- Отсутствует влияние веса вала на результат измерения при горизонтальном монтаже направления измерения
- Положительная температурная характеристика и высокая линейность измерительных элементов благодаря применению тензорезисторных полосок на ровной плоскости
- Высокое допустимое рабочее число оборотов измерительного вала благодаря большой пружинной константе датчика натяжения полотна.
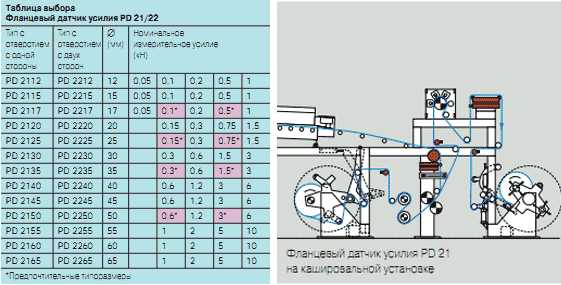
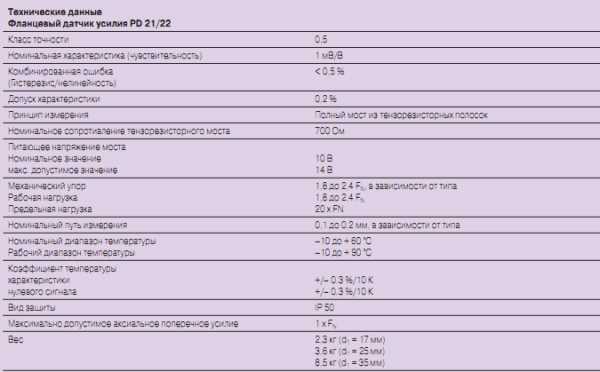
Фланцевый датчик натяжения PD 21/22

- Независимый от опор, беспроблематичный монтаж благодаря различным возможностям монтажа как, например, фланцевый подшипник, подшипник на лапках, внутреннее или внешнее крепление
- Высокая надежность датчика усилия при эксплуатации благодаря защите от перегрузок до 20-ти кратного номинального измерительного усилия
- Различные диаметры валов от 12 до 65 мм и номинальные измерительные усилия от 0,05 до 10 кН обеспечивают высокую гибкость
- Отсутствует влияние веса вала на результат измерения при горизонтальном монтаже направления измерения
- Положительная температурная характеристика и высокая линейность измерительных элементов благодаря применению тензорезисторных полосок на ровной плоскости
- Высокое допустимое рабочее число оборотов измерительного вала благодаря большой пружинной константе датчика натяжения полотна.
erhardt-leimer.ru
Датчик натяжения каната
Изобретение относится к измерительной технике и может быть использовано для определения натяжения гибких связей, в частности канатов. Устройство включает корпус с установленным в нем преобразователем, упругий элемент, прикрепленный к корпусу преобразователя, прижимное устройство, прижимающее гибкий орган к концу упругого элемента. При этом к другому концу упругого элемента прикреплена стойка и упор, воздействующий на вход преобразователя. На опорной поверхности стойки установлен фиксатор положения каната, выполненный в виде конуса. Прижимное устройство выполнено в виде пластины с центральным продольным углублением. Технический результат заключается в повышении точности измерений, а также упрощении конструкции. 3 з.п. ф-лы, 5 ил.
Изобретение относится к измерительной технике и может быть использовано для определения натяжения неподвижного каната, например, на подъемниках, применяемых при текущем и капитальном ремонте скважин.
Известен датчик натяжения неподвижного гибкого органа, содержащий прижимно-прогибочное устройство, включающее две стойки с вырезами для укладки гибкого органа, ложемент, установленный на упругом элементе, скобу для прижатия гибкого органа к ложементу, преобразователь механической величины в электрическую. Упругий элемент имеет внутреннюю цилиндрическую полость, на одном конце которой в поперечном сечении размещена мембрана с жесткой консольной балкой и преобразователем, а на другом конце цилиндрической полости расположен упор, взаимодействующий с концом консольной балки (см. патент RU 2195637, МКИ 7 G01L 5/10, 5/06, 5/04).
Данное устройство позволяет измерять силу натяжения каната, однако это устройство имеет низкую точность, сложно в исполнении и ненадежно при эксплуатации.
Известно силоизмерительное устройство для измерения натяжения гибкого органа, включающее прижимное устройство, зажимающее его на заданной длине, и жестко скрепленное с датчиком силы, включающим упругий элемент, один конец которого жестко скреплен с корпусом датчика силы, имеющим внутреннюю полость с размещенными в ней преобразователем перемещения или силы в электрическую величину, к другому концу упругого элемента жестко прикреплена стойка с упором, воздействующим на входной параметр преобразователя (см. патент RU №45775 на полезную модель МКИ 7, Е21В 47/00). Данный патент взят за прототип.
Данное устройство позволяет измерять натяжение каната.
Однако данное устройство обладает низкой точностью измерений. В данном устройстве силу, воздействующую на вход преобразователя, получают за счет изгиба каната. Изгиб каната осуществляют при помощи прижимного устройства и одной стойки, на которую укладывают канат. Такое выполнение датчика дает большую погрешность измерения из-за неоднозначной укладки стального каната на стойку, что приводит к непостоянству угла преломления гибкого органа, а это в свою очередь приводит к увеличению погрешности измерения.
Сущность изобретения. Изобретение направлено на создание датчика, имеющего более высокую точность измерения натяжения каната.
Технический результат заключается в том, что, установив на стойке фиксатор положения каната в виде конуса или в виде призмы или пирамиды, пряди каната располагаются более устойчиво относительно упора, а выполнение прижимного устройства в виде пластины с центральным продольным углублением позволит надежно закрепить датчик натяжения каната, фиксировать расстояние h центра каната от опорной поверхности, стабилизировать угол отклонения каната стойкой, что значительно уменьшит погрешность измерения силы его натяжения и приведет к повышению точности.
Указанный технический результат достигается тем, что датчик натяжения каната (ДНК), содержащий корпус, с установленным в нем преобразователем, упругий элемент, прикрепленный к корпусу преобразователя, прижимное устройство, прижимающее гибкий орган к концу упругого элемента и выполненное в виде пластины с центральным продольным углублением, к другому концу упругого элемента прикреплены стойка и упор, воздействующий на вход преобразователя, на опорной поверхности стойки установлен фиксатор положения каната, выполненный в виде конуса или в виде призмы или пирамиды.
Кроме того, фиксатор положения каната выполнен за одно целое со стойкой.
Кроме того, фиксатор положения каната выполнен из материала, например, стали 40Х13.
Кроме того, упругий элемент выполнен в виде пластины из материала, например, стали 40Х13.
На фиг.1 представлен общий вид продольного сечения датчика натяжения каната, на фиг.2 представлен вид его со стороны стойки, на фиг.3 и фиг.4 представлены виды поперечного сечения каната и опорной поверхности стойки, на фиг.5 представлено поперечное сечение каната, стойки и фиксатора положения каната.
Датчик натяжения каната (ДНК) (фиг.1) содержит канат 1, прижимное устройство 2, выполненное с продольным углублением в центре для укладки каната 1, упругий элемент 3, прикрепленный к корпусу 4 элементами крепления 5 (например, болты, гайки, винты, шайбы и т.п.). Внутри корпуса 4 расположены преобразователь 6 и устройство ввода-вывода 7, выполненного в виде герметичного разъема. Упругий элемент 3 одним концом жестко прикреплен к корпусу 4, а другим – к стойке 8 и упор 9, а фиксатор положения каната 10 установлен на опорной поверхности стойки 8. С другой стороны корпус 4 закрыт крышкой 11. Прижимное устройство может быть выполнено в виде пластины с центральным продольным углублением для надежного закрепления датчика на гибком органе. Упругий элемент выполнен в виде пластины из материала, например, стали 40Х13 и предназначен для согласования величины силы, воздействующей на упругий элемент и величины входного параметра преобразователя.
Датчик натяжения каната работает следующим образом.
Датчик натяжения устанавливают на канате 1, например, на неподвижном конце талевого каната подъемника, применяемого при ремонте нефтяных и газовых скважин, или буровой установки следующим образом. Канат 1 укладывают в продольное углубление прижимного устройства 2 с учетом действия фиксатора положения каната 10. Прижимное устройство 2 элементами крепления 5 прижимает канат 1 к одному из концов упругого элемента 3 и к корпусу 4. Зажатие каната 1 должно быть плотным, чтобы датчик не мог перемещаться вдоль него. На другом конце упругого элемента 3 жестко прикреплена стойка 8 и упор 9. Благодаря стойке 8 осуществляют изгиб каната 1 для создания силы В (см. фиг.1), воздействующей на упругий элемент 3. Сила В прогибает конец упругого элемента 3. Величина прогиба упругого элемента 3 зависит от величины входного параметра преобразователя 6, измеряющего перемещение. Например, для преобразователя С-50 величина входного перемещения составляет 0,2 мм. В этом случае при натяжении каната 1 силой А на стойку 8 и конец упругого элемента 3 воздействует сила В, которая прогибает его относительно корпуса 4 от 0 до 0,2 мм. Сила В, воздействующая через стойку на упругий элемент, прямо пропорциональна натяжению каната. Однако при установке ДНК на канат подъемника канат может расположиться на опорной поверхности стойки как угодно. Из всех возможных вариантов выделим два крайних случая:
а) две пряди каната ложатся на опорную поверхность стойки (см. Фиг.3),
б) одна прядь каната ложится на опорную поверхность стойки (см. Фиг.4).
На Фиг.3 и 4 видно, что расстояние h центра каната от опорной поверхности будет различное, что приведет к различному углу отклонения каната стойкой, а это в свою очередь приведет к погрешности измерений. Например, для каната типа ЛК-РО ГОСТ 7668-80 диаметром 38 мм h3-h2=1,5 мм и при высоте стойки 8, равной 9 мм, погрешность составит 16,7%, что весьма существенно при измерении натяжения канатов. Для уменьшения этой погрешности предлагается установить фиксатор положения каната 10 на опорной поверхности стойки 8. На Фиг.4 показана установка фиксатора положения каната на опорной поверхности стойки 8. Он представляет собой конус, изготовленный, например, из стали 40Х13. Фиксатор положения каната может быть выполнен за одно целое со стойкой в виде призмы или пирамиды.
Таким образом, введение в известное устройство фиксатора положения каната позволяет устанавливать ДНК на канате однообразно, т.е. всегда на опорной поверхности стойки будут находиться две пряди, что значительно повысит точность измерения натяжения канатов.
Так как стойка 8 жестко скреплена с концом упругого элемента 3, то при перемещении она воздействует на вход преобразователя 6 упором 9. Преобразователь 6 вырабатывает сигнал, пропорциональный величине силы А натяжения каната 1. В качестве преобразователя 6 может быть применен интегральный тензопреобразователь силы серии “С”, например, С50 с подключенной к нему печатной платой. Преобразователь 6 формирует стандартный выходной сигнал согласно ИСО и ГОСТ или сигнал, удобный для восприятия потребителем, например, в цифровой форме. Датчик натяжения каната подключают к любой аппаратуре при помощи устройства ввода-вывода 6, например, при помощи герметичного разъема типа ШРГ.
1. Датчик натяжения каната, включающий корпус с установленным в нем преобразователем, упругий элемент, прикрепленный к корпусу преобразователя, прижимное устройство, прижимающее гибкий орган к концу упругого элемента, к другому концу упругого элемента прикреплена стойка и упор, воздействующий на вход преобразователя, отличающийся тем, что на опорной поверхности стойки установлен фиксатор положения каната, выполненный в виде конуса или в виде призмы или пирамиды, а прижимное устройство выполнено в виде пластины с центральным продольным углублением.
2. Датчик натяжения каната по п.1, отличающийся тем, что фиксатор положения каната выполнен за одно целое со стойкой.
3. Датчик натяжения каната по п.1, отличающийся тем, что упругий элемент выполнен в виде пластины из материала, например, стали 40Х13.
4. Датчик натяжения каната по п.1, отличающийся тем, что фиксатор положения каната выполнен из материала, например, стали 40Х13.
www.findpatent.ru
Датчик контроля натяжения движущегося полотна
тта т сэнт.
О П И С ” А.: Н И Е
ИЗОБРЕТЕНИЯ
235981
Союэ Советских
Социалистических
Республик
К АВТОРСКОМУ СВИДЕТЕЛЬСТВУ
Зависимое от авт. свидетельства ¹â€”
Заявлено 08.Х.1964 (№ 923184/28-12) Кл. 39а>, 9,, 02 с присоединением заявки ¹â€”
Приоритет
МПК В 29h
УД1(677А6,051.814
677.46.061.43 (088.8) Комитет по полам иэобретений и открытий пои Совете Министров
СССР
Опубликовано 24,1.1969. Бюллетень № 6
Дата опубликования описания 5Х1.1969
Авторы изобретения
А. E Донских, Б. А. Галинский, В. И. Минин, В. С. Голубков, Э. А. Юршевич, М. А. Чеглаков и В. И. Воробьев
СКБ красильно-отделочного производства
Заявите:Ib
ДАТЧИК КОНТРОЛЯ НАТЯЖЕНИЯ ДВИЖУ1ЦЕГОСЯ ПОЛОТНА
Известные пневматические датчики не могут обеспечить точности, поддержания задаваемого режима обработки движущегося полотна из-за внутренних сопротивлений в пневмоцилиндрах и в кинематических связях.
Предложенный датчик обеспечивает стабиль ность натяжения обрабатываемого полотна.
Он выполнен в виде направляющего полотно свободно вращающегося ролика, подшипники которого опираются на буферные пружины и кинематически связаны с валом сельсина, передающего импульс в систему управления электродвигателями привода полотна, причем применены буферные пружины тарельчатого типа. Кинематическая связь подшипников с валом сельсина выполнена в виде двуплечего рычага, снабженного зубчатым сектором, взаимодействующим с зубчатым венцом вала сельсина.
На фиг. 1 изображен предложенный датчик, вид сбоку; на фиг. 2 — передача к сельсину.
На стойках 1 установлены свободно вращающиеся направляющие ролики 2,,1 и 4, охватываемые движущимся полотном 5, из которых ролик 4 является подвижным в вертикальном направлении. Подшипники этого ролика опираются через грибок 6 на буферные пружины 7 тарельчатого типа. При изменении натяжения полотна грибок передает усилие на пружины, деформация которых воспринимается двуплечпм рычагом 8, снабженным зубчатым сектором 9, который, взаимодействуя с зубчатым венцом сельсина 10, поворачивает вал последнего на определенныи угол в зависимости от натяжения полотна и сельсин передает импульс в систему управления электродвигателями привода полотна, которая отрабатывает полученный сигнал, поддерживая стабильность натяжения.
Предмет изобретения
1. Датчик контроля натяжения движущегося полотна, отличающийся. тем, что, с целью поддержания стабильности натяжения обра15 батываемого полотна, он выполнен в виде направляющего полотно свободно вращающегося ролика, подшипники которого опираются на буферные пружины и кпнематическп связаны с валом сельсина, передающего импульс
20 в систему управления электродвигателями привода полотна.
2. Датчик по п. 1, отличающийся тем, что применены буферные пружины тарельчатого типа.
25 3. Датчик по п. 1, отличающийся тем, что кинематическая связь подшипников с валом сельсина выполнена в виде двуплечего рычага, снабженного зубчатым сектором, взаимодействуюгцим с зубчатым венцом вала сель30 сина., сд;1кт! .() Т. В. Дав алова! . ред А. А. К!!мы!ппикова Корректоры: A. Николаева и А. С. Абрамова
Заказ 793 8 рир!!зк 480 Иодииспос
1!,!ИИИПИ Коми гста по дела. изобрстс . !!и и отк!Рп!1и!! при Сопстс Мипистроп СССР .а1оскпи, !.!спер, ð. Ссрэпа, д. 4
Типо!рафик, пр. Са!и попа, 2
www.findpatent.ru
Датчики натяжения полотна
Измерители натяжения ELTENS
Для измерения натяжения полотна используются следующие датчики ELTENS
Блочный датчик усилия PD 7
- Возможен монтаж подшипников на лапках со стандартными направляющими валами
- Наряду со стальным исполнением для сухих областей имеется и нержавеющее исполнение датчика для мокрых областей
- Высокая надежность блочного датчика при эксплуатации благодаря защите от перегрузок до 10-ти кратного номинального измерительного усилия
- Различные типоразмеры и номинальные измерительные усилия от 0,1 до 70 кН обеспечивают высокую гибкость
- Встроенный демпфирующий элемент против ударной нагрузки и колебаний машины.
Алюминиевый фланцевый датчик натяжения PD 25
- Экономичный фланцевый датчик усилия из алюминия.
- Сопоставимый со стандартной серией PD 21/22.
- Независимый от опор, беспроблематичный монтаж благодаря различным возможностям монтажа как, например, фланцевый подшипник, подшипник на лапках, внутреннее или внешнее крепление
- Высокая надежность датчика усилия при эксплуатации благодаря защите от перегрузок до 10-ти кратного номинального измерительного натяжения
- Отсутствует влияние веса вала на результат измерения при горизонтальном монтаже направления измерения
- Положительная температурная характеристика и высокая линейность измерительных элементов благодаря применению тензорезисторных полосок на ровной плоскости
- Высокое допустимое рабочее число оборотов измерительного вала благодаря большой пружинной константе датчика натяжения полотна.
Нержавеющий фланцевый датчик натяжения PD 23/24
- Фланцевый датчик усилия из нержавеющей стали для тяжелых условий окружающей среды как, например, моечных или травильных машин.
- Независимый от опор, беспроблематичный монтаж благодаря различным возможностям монтажа как, например, фланцевый подшипник, подшипник на лапках, внутреннее или внешнее крепление
- Высокая надежность датчика усилия при эксплуатации благодаря защите от перегрузок до 20-ти кратного номинального измерительного натяжения
- Отсутствует влияние веса вала на результат измерения при горизонтальном монтаже направления измерения
- Положительная температурная характеристика и высокая линейность измерительных элементов благодаря применению тензорезисторных полосок на ровной плоскости
- Высокое допустимое рабочее число оборотов измерительного вала благодаря большой пружинной константе датчика натяжения полотна.
Фланцевый датчик натяжения PD 21/22
- Независимый от опор, беспроблематичный монтаж благодаря различным возможностям монтажа как, например, фланцевый подшипник, подшипник на лапках, внутреннее или внешнее крепление
- Высокая надежность датчика усилия при эксплуатации благодаря защите от перегрузок до 20-ти кратного номинального измерительного усилия
- Различные диаметры валов от 12 до 65 мм и номинальные измерительные усилия от 0,05 до 10 кН обеспечивают высокую гибкость
- Отсутствует влияние веса вала на результат измерения при горизонтальном монтаже направления измерения
- Положительная температурная характеристика и высокая линейность измерительных элементов благодаря применению тензорезисторных полосок на ровной плоскости
- Высокое допустимое рабочее число оборотов измерительного вала благодаря большой пружинной константе датчика натяжения полотна.
erhardt-leimer.ru
ТЮМЕНСКИЙ ОПЫТНО-ЭКСПЕРИМЕНТАЛЬНЫЙ ЗАВОД ГЕОФИЗИЧЕСКОГО ПРИБОРОСТРОЕНИЯ
Датчик натяжения ДАН-10
Датчик натяжения (ДАН-10) предназначен для измерения величины натяжения геофизического кабеля при выполнении спуско-подъёмных операций в скважинах с передачей данных для регистрации на каротажную станцию.
Возможна комплектация датчика натяжения ДАН-10 с панелью индикации «LED-1».
Датчик магнитных меток ДММ-1
Датчик магнитных меток (ДММ-1) предназначен для считывания магнитных меток, нанесённых на геофизическом каротажном кабеле и преобразования принятого сигнала в напряжение, пропорциональное напряжённости поля магнитной метки, с последующей передачей данных на каротажную станцию.
Датчик глубины ДГ-ЗМ
Датчик глубины (ДГ-ЗМ) предназначен для измерения и передачи данных глубины геофизического кабеля при спуско-подъёмных операций. Крепление датчика осуществляется на нижнем блок-балансе.
|
Технические характеристики |
ДАН-10 |
ДГ-ЗМ |
ДММ-1 |
|
Диапазон измерения |
от 0,1 до 100 кН |
от 0 до 500 об/мин |
от 0 до 4 м/с, полярность SNNS |
|
Выходной сигнал |
токовый, 0…10мА / 0…10т |
квадратурное кодирование сигнала; выходы с открытым коннектором |
напряжение 0…12В |
|
Номинальный коэффициент преобразования выход/вход |
0,1мА/кН |
1 имп./см |
пропорционально напряженности поля магнитной метки |
|
Погрешность измерения |
|
± 0,45° |
|
|
Напряжение питания постоянного тока,В |
+ 12 (+ 15/-0.5) |
12±1 |
+ 12 |
|
Ток потребления, мА |
40 |
40 |
<10 |
|
Габаритные размеры, мм |
73*65*180 (без узла встройки)* |
170*180*205 |
172*38*38 |
|
Масса, кг |
1,1 (без узла встройки)** |
5 |
0.4 |
|
Рабочая температура эксплуатации, °С |
от -50 до +50 |
от -40 до +50 |
от -45 до +50 |
|
* С узлом встройки для верхнего блок-баланса 100* 180*330 С узлом встройки для нижнего блок-баланса 100* 180*460 |
|||
|
** С узлом встройки для верхнего блок-баланса 12 С узлом встройки для нижнего блок-баланса 8 |
|||
www.tzgp.ru